西门子数控系统结构及应用(SINUMERIK 840D sl)最新版教案03第三章 开机调试 教案
840DSL内部培训教案 PPT

旋转变压器
是
增量型编码器 sin/cos(1 Vpp)
-
绝对值编码器 EnDat
-
增量型编码器 TTL/HTL
-
温度分析
是
SMC20/SME20 是 是 是
SMC30/SME30 是 是
电机的电子名牌
当带有DRIVE-CLIQ接口 的电机在拓扑识别显示为 SMI。其实SMI是一个集 成在电机里面的SME模块, 不同与SME的是上面有存 储芯片记录电机和编码器 的名牌信息,所以叫做电 机电子名牌
840D sl:NCU 和 NX
NCU
SINAMICS S120 电源模块
NX10 NX15
电机模块
DRIVE CLiQ 接口 轴
NX10/15
NCU 710.2 4个
多达 6 根 多达 2 个
NCU 720.2/730.2(PN) 6个 多达 31 根 多达 5 个
NCU轴侧图
NX模块轴侧图
NCU与NX之间的连接
program
内部使能关系图
X21.3
ALM
PPU
PLC
EP Ready
r899.0
ALM OFF1
p840
Infeed operation
r863.0
ALM EP Ready
X132.8
OFF1
X122.1
OFF1 Ready
X132.7
OFF3
X122.2
NC控制 MM
p864 p849
NX
r8510.0 r8511.1
21
驱动系统连接图
c126 c120
c104 c103 c102
c100
c101
SINUMERIK 840D编程教案教材1—76
第一章数控编程基础在数控机床上加工工件时,要把加工工件的全部工艺过程、工艺参数和位移数据,以信息的形式记录在控制介质(数控电脑)上,用控制介质上的信息控制机床,实现工件的全部加工过程。
这里我们把从工件图样到获得数控机床所需控制介质的全部过程,称为程序编制。
第一节程序编制的内容及过程使用数控机床加工工件时,程序编制是一项重要的工作。
迅速,正确而经济地完成程序编制工作,对于有效地利用数控机床是具有决定意义的一环。
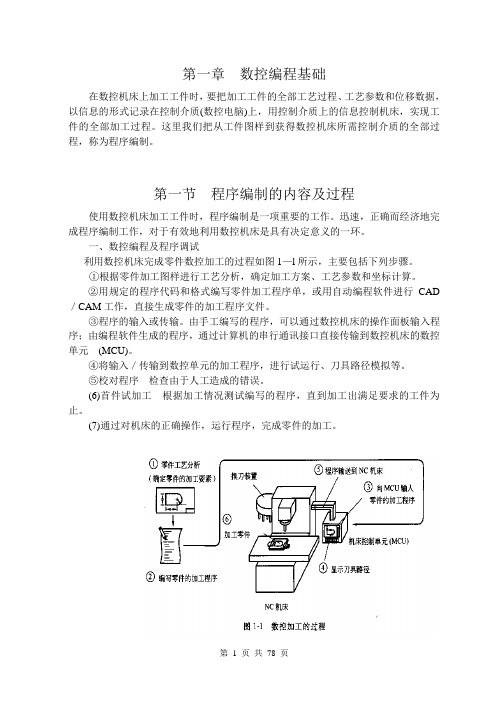
一、数控编程及程序调试利用数控机床完成零件数控加工的过程如图1—l所示,主要包括下列步骤。
①根据零件加工图样进行工艺分析,确定加工方案、工艺参数和坐标计算。
②用规定的程序代码和格式编写零件加工程序单,或用自动编程软件进行CAD /CAM工作,直接生成零件的加工程序文件。
③程序的输入或传输。
由手工编写的程序,可以通过数控机床的操作面板输入程序;由编程软件生成的程序,通过计算机的串行通讯接口直接传输到数控机床的数控单元(MCU)。
④将输入/传输到数控单元的加工程序,进行试运行、刀具路径模拟等。
⑤校对程序检查由于人工造成的错误。
(6)首件试加工根据加工情况测试编写的程序,直到加工出满足要求的工件为止。
(7)通过对机床的正确操作,运行程序,完成零件的加工。
由此可见,数控编程是数控加工的重要步骤。
用数控机床对零件进行加工时,首先对零件进行加工工艺分析,以确定加工方法、加工工艺路线;正确地选择数控机床刀具和装卡方法;然后,按照加工工艺要求,根据所用数控机床规定的指令代码及程序格式,将刀具的运动轨迹、位移量、切削参数(主轴转速、进给量、吃刀深度等)以及辅助功能(换刀、主轴正转/反转、切削液开/关等)编写成加工程序单,传送或输入到数控装置中,从而指挥机床加工零件。
二、数控编程的内容与方法程序编制一般包括以下几个方面的工作。
(1)加工工艺分析编程人员首先要根据零件图纸,对零件的材料、形状、尺寸、精度和热处理要求等,进行加工工艺分析。
840D培训教案

数控系统及编程本章介绍的XHA2120×40型动梁龙门加工中心配置的SINUMERIK840D数控系统的编程基本概念及基本指令。
一、编程基本概念1.坐标轴概述(1)Z坐标轴。
在机床坐标系中,规定传递切削动力的主轴方向为Z坐标轴。
(2) X坐标轴。
X坐标轴是水平的,为工作台(或龙门框)前后移动方向。
(3) Y坐标轴。
Y坐标轴是水平的,为主轴部分左右移动方向。
图1工作台移动式龙门机床图2龙门移动式铣床(4)主轴旋转方向:图3中使用右手螺旋定则判断主轴方向。
(使用附件头时特别注意:判断附件头转向)图3右手螺旋法则2.坐标系概述数控加工需要精确控制机床主轴上刀具运动的位置,因此,各运动部件的运动方向必须在一个坐标系统内进行规定,为了简化编程的方法和保证程序的通用性,对数控机床的坐标和方向的命名制定了统一的标准。
1)机床坐标轴:按照德国标准DIN66217的规定,对于机床应用右手螺旋定则、笛卡尔坐标系。
图3中大拇指的指向为X轴的正向。
食指的指向为Y轴的正向。
中指的指向为Z轴的正向。
基本直线轴: X、Y、Z这三个轴为机床的基本直线轴。
图3右手定则基本旋转轴:A、B、C。
围绕X、Y、Z轴旋转的圆周坐标轴分别为A、B、C轴。
根据右手螺旋法则。
图4中大拇指指向为+X、+Y、+Z方向,其余四指的指向为圆周运动的旋转轴A、B、C轴的正方向图4右手螺旋法则附加直线轴:如果在基本的直角坐标轴X、Y、Z轴之外,另有分别平行于它们的直线轴,则称为U、V、W附加坐标轴。
2)机床坐标系(MCS):机床坐标系是用来确定工件坐标系的基本坐标系。
机床坐标系的原点也称为机床原点或机床零点。
这个原点的位置在机床出厂前已经由机床制造厂家进行了设定,它是一个固定的点。
为了正确地建立机床坐标系,通常在每个坐标轴的运动范围内设立一个机床参考点。
机床参考点与机床原点的相对位置由机床参数设定。
因此,机床开机后必须先进行回机床参考点的操作。
机床回参考点后,才能;1,激活(建立)机床坐标系。
SIEMENS840D系统培训讲义SINUMERIK
SINUMERIK 840D系统培训讲义Edition 10.2003用户维修北京凯普精益机电技术有限公司第一章 SINUMERIK 840D系统的硬件构成一.SINUMERIK 840D系统的组成SINUMERIK 840D系统的硬件主要由下列几部分构成:1.NCU 数控单元(Numerical control unit)数字控制核心NCK的硬件装置。
NCU单元集成了SINUMERIK 840D数控CPU和S7-300的PLC CPU芯片,包括数控软件和PLC软件。
2.人机交互装置(MMC)SINUMERIK 840D系统可以使用MMC100.2、MMC103,PCU20,PCU50。
其人机操作界面可选OP031,OP032等。
其建立起SINUMERIK840D系统与操作人员之间的交互界面。
3.可编程序控制器PLCSINUMERIK 840D系统集成了S7-300-2DP的PLC,并通过通讯模块IM361扩展外部的I/O模块。
4.驱动装置SINUMERIK 840D系统可采用全数字伺服驱动SIMODRIVE611D,配以1FT,1FK系列进给电机和1PH系列的主轴电机。
二.SINUMERIK 840D系统的硬件安装SINUMERIK 840D系统各模块在安装排列时,最左侧通常为电源模块,其后为NCU控制板,MSD主轴驱动模块,FDD进给驱动模块。
通常,驱动模块遵循功率越大的模块越靠近左侧。
Fig. 1-1 840D系统连接图Fig.1-2 SINUMERIK 840常用组态方式三.NCU数控装置a)NCU的硬件版本NCU571.2 486DX2处理器,大到1.5MB的CNC存储器和288KB的用户存储器。
最多可控制十个坐标轴或主轴,一个通道。
NCU572 486DX2处理器,大到1.5MB的CNC存储器和288KB的用户存储器。
最多可控制十个坐标轴或主轴,二个通道。
NCU573.2 奔腾级处理器,大到1.5MB的CNC存储器和288KB的用户存储器。
西门子数控系统结构及应用(SINUMERIK 840D sl)最新版教学课件第7章

7.2自动优化选项设置和方案选择
1.选项设置 在“菜单”——>“调试”——>“优化测试”——>“自动伺服优 化”界面下软键选择“选项”后,出现“自动伺服优化:选项”界面, 840D sl系统自动伺服优化选项设置共有10项内容供用户选择,如图7-2 所示,按照使用需求选择相应的选项,最终按“确认”键。
9)电流环测量 10)速度环测量 11) 位置环测量 12)跟踪功能 13)圆度测试 14)函数信号发生器 15)主从轴组的自动优化 16)通过程序调用自动优化
(2)当机床使用缺省设定不能满足要求时,需要进行驱动优化,主 要步骤如下:
1)利用自动伺服优化功能优化单个轴 2)使用测量功能和跟踪功能检查和设定轴特性 3)利用插补轴组优化功能优化插补轴 4)使用圆度测试功能调整和匹配插补轴间的关系 5)通用数据,通道数据和轴数据调整,手动优化单个轴的顺序是: 电流环、速度环、位置环,跟踪以及圆度测试。
7.1驱动优化基础
1.基本概念 驱动系统包括3个反馈回路,即位置回路、速度回路以及电流回路,其 组成框图如图7-1所示。最内环回路的反应速度最快,中间环节的反应速度 必须高于最外环,如果没有遵守此原则,将会造成振动或反应不良。通常 驱动器的设计可确保电流回路具备良好的反应性能,用户只需调整位置回 路与速度回路。
SW4.7版本允许不同的Kv值,而采用MD32910 或MD32895 等延时的方式来 进行匹配。前馈方式一致(速度前馈或力矩前馈):相同的MD32620。前 馈时间常数可以不一致(速度前馈或力矩前馈)。对于速度前馈,参考模 型须一致;而对于力矩前馈,参考模型可以不同。动态刚性控制DSC 一致: 相同的MD32640。
第七章 驱动优化
亚龙YL-559型西门子840Dsl铣床实训设备
SINUMERIK 840D数控系统
西门子SINUMERIK 840D数控系统的多轴加工重复循环及其在VERICUT中的实现一、前言西门子SINUMERIK 840D系统作为一个高端的数控系统,指令丰富,功能强大,被广泛应用到各类加工中心上。
该系统的宏指令(@代码)编程方式既是对标准编程指令集的补充,又极大地扩充了系统的编程指令,同时也极大地方便了用户的使用。
用户完全可以根据自身的需要,去编制简洁、实用、优化以及有针对性的程序,以实现各种功能。
产品零件的多轴加工,在这里我们主要是指应用4~5轴的加工方式实现对零件的加工。
实际工作中通常都使用标准的编程指令去编制程序,但有时我们也会碰到一些结构上比较有特点的零件,比如图1、图2所示的叶轮类的零件,这类零件的每一个叶片和流道只是在某个旋转轴上相差一个角度,如果将所有的加工轮廓都编制出来,显然是很不经济,也使得程序冗长。
相反只编制一个叶片和流道的加工轮廓,通过重复循环的方式去实现整个叶轮的加工,这样的零件加工程序简洁,结构才更加合理。
这种重复循环编程方式通过宏指令完全可以实现,在我们工厂里早已应用。
但是我们以前程序中所使用的某些宏指令在VERICUT软件中不起作用,无法实现完整的程序仿真。
经过对西门子SINUMERIK 840D系统标准编程指令、宏指令以及VERICUT软件本身的研究,我最终找到了即能被数控系统接受,又能在VERICUT软件中实现重复循环功能的方式。
以下就该数控系统的多轴加工重复循环问题以及如何在VERICUT中去实现的问题介绍一下我的处理方式,重点介绍数控系统和VERICUT软件都接受的方式。
图1叶轮类零件二、西门子SINUMERIK 840D数控系统常用的多轴加工重复循环西门子SINUMERIK 840D系统是开放式的数控系统,可以通过数据通道实现系统变量和外部R参数之间的相互传递,因此比较容易通过宏指令去实现重复循环的功能。
西门子SINUMERIK 840D系统中提供了程序分支和R参数到系统内存的数据传输以及算术功能的宏指令,我们通过@12X这种IF-THEN-ELSE指令或者@13X这种WHILE指令以及@100这种GOTO指令去实现多次的循环和程序的跳转,通过@430零点偏移输入指令或@432可编程零点偏移输入指令将程序分支中的相应R参数调入去实现加工轨迹的旋转,最终实现多轴加工的重复循环功能。
西门子数控系统结构及应用(SINUMERIK 840D sl)最新版教学课件第1章

图1-4 SINUMERIK 840D数控系统
图1-5 SINUMERIK 810D数控系统
图1-6 SINUMERIK 802D数控系 统
◆2013以后,随着德国在《德国2020高技术战略》中提出德国工业4.0的概念, 西门子顺应潮流,推出了最新的SINUMERIK 840D sl,828D合808D数控系统。 2016年在4月11日至15日在上海举行的“第九届中国数控机床展览会(CCMT 2016) 上,西门子公司对上述数控系统及其相关机电产品以“迈向工业4.0之数字制造” 为主题进行了集中展示,该系列数控系统实现了全部的数字化,并能实现与IT技 术及机器人技术的高度集成。
不同点
共同点
◆最多支持4根进给轴/主轴
◆PPU型号为141.2,采用7.5'' 彩色
LCD显示屏
◆驱动器采用SINAMICS V60,伺 服电机采用SIMOTICS 1FL5型 ◆可实现手动机床操作(MM+)与数 控加工的结合 ◆最多支持5根进给轴/主轴 ◆PPU型号为160.3/PPU161.3,采 用8.4'' 彩色LCD显示器 ◆驱动器采用SINAMICS V70(数 字量)主轴伺服电机采用 SIMOTICSM-1PH1具有更快的加减 速性能、更好的定位精度及更强的 动态响应特性 ◆配备Drive Bus高速总线通讯及20
1.STEP7 STEP7是西门子公司出品的一款编程软件,用于西门子系列工控产品包括 SIMATIC S7、M7、C7和基于PC的WinAC的编程、监控和参数设置,是SIMATIC工业 软件的重要组成部分。 STEP7的软件版本包括STEP7 Basic,STEP7,STEP7 ProFessional,STEP7 Lite,STEP7 Micro等等,其中STEP7是用于S7-300/400的编程软件,编程方式可 使用LAD(Ladder—梯形图),STL(Step Ladder Instruction—步进梯形图)和 FBD(Functional Block Diagram—功能框图)三种编程语言。
西门子数控系统结构及应用(SINUMERIK 840D sl)最新版教案03第三章 开机调试 教案

教师教案教学内容(板书)教学步骤、方法时间3.1系统初次上电与系统总清1.初次上电前检查全部系统连线完成后需要做一些必要的检查,内容如下:(1)参照系统接线图,检查系统连线是否正确。
(2)工业以太网/PROFINET/PROFIBUS/Drive-CLiQ线缆不得混用。
(3)检查驱动器进线电源模块和电机模块的直流母线是否可靠连接(直流母线上的所有螺钉必须牢固旋紧)。
(4)确保信号电缆屏蔽两端都与机架或机壳连通。
(5)信号线与动力线尽可能分开布置,避免相互干扰。
(6)信号线不要太靠近类似电机或变压器等外部强的电磁场,如果信号线无法与其它电缆分开,则应走屏蔽穿线管进行线路隔离。
(7)检查系统供电回路有无短路;如果使用多个24VDC电源,应检查每个电源回路是否连通。
2.系统NC与PLC总清840Dsl数控系统初次上电时,需要对系统进行NC及PLC总清,具体的操作位置位于NCU。
在总清前确保系统已经安装CF卡及已安装NCK系统。
如图所示,NCU前面板下端活动夹盖上翻后,可见CF 卡槽及七段显示数码管。
NCU及CF卡学生了解总清方法即可,不建议进行实际操作!1h教学内容(板书)教学步骤、方法时间(1)系统总清目的为了能顺利进行调试,在NCU首次调试时必须对NC及PLC进行总清,以达到整个系统规定的初始状态。
NC总清:删除用户数据;系统数据初始化;装载标准机床数据。
PLC总清:删除数据块及功能块;删除系统数据块SDB;清除诊断缓冲区MPI参数。
(2)NC和PLC总清相关部件说明1)在开机调试过程中,涉及到以下相关NCU操作及显示组件如图3-2所示,NCK(NC Realtime Kemal)是指西门子的数控实时操作核心系统。
◆LED灯:显示系统运行状态及故障信息◆数码显示管:NCU运行状态显示◆复位(RESET)键:NCU系统硬件重启◆SVC/NCK调试开关:可以进行NC总清◆PLC调试开关:可以进行PLC总清NCU操作面板2)NCK运行信息及处理方法NCU上LED灯显示信息说明见下表。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
教师教案教学内容(板书)教学步骤、方法时间3.1系统初次上电与系统总清1.初次上电前检查全部系统连线完成后需要做一些必要的检查,内容如下:(1)参照系统接线图,检查系统连线是否正确。
(2)工业以太网/PROFINET/PROFIBUS/Drive-CLiQ线缆不得混用。
(3)检查驱动器进线电源模块和电机模块的直流母线是否可靠连接(直流母线上的所有螺钉必须牢固旋紧)。
(4)确保信号电缆屏蔽两端都与机架或机壳连通。
(5)信号线与动力线尽可能分开布置,避免相互干扰。
(6)信号线不要太靠近类似电机或变压器等外部强的电磁场,如果信号线无法与其它电缆分开,则应走屏蔽穿线管进行线路隔离。
(7)检查系统供电回路有无短路;如果使用多个24VDC电源,应检查每个电源回路是否连通。
2.系统NC与PLC总清840Dsl数控系统初次上电时,需要对系统进行NC及PLC总清,具体的操作位置位于NCU。
在总清前确保系统已经安装CF卡及已安装NCK系统。
如图所示,NCU前面板下端活动夹盖上翻后,可见CF 卡槽及七段显示数码管。
NCU及CF卡学生了解总清方法即可,不建议进行实际操作!1h教学内容(板书)教学步骤、方法时间(1)系统总清目的为了能顺利进行调试,在NCU首次调试时必须对NC及PLC进行总清,以达到整个系统规定的初始状态。
NC总清:删除用户数据;系统数据初始化;装载标准机床数据。
PLC总清:删除数据块及功能块;删除系统数据块SDB;清除诊断缓冲区MPI参数。
(2)NC和PLC总清相关部件说明1)在开机调试过程中,涉及到以下相关NCU操作及显示组件如图3-2所示,NCK(NC Realtime Kemal)是指西门子的数控实时操作核心系统。
◆LED灯:显示系统运行状态及故障信息◆数码显示管:NCU运行状态显示◆复位(RESET)键:NCU系统硬件重启◆SVC/NCK调试开关:可以进行NC总清◆PLC调试开关:可以进行PLC总清NCU操作面板2)NCK运行信息及处理方法NCU上LED灯显示信息说明见下表。
红色2Hz指示灯闪烁,此时为系统永久性错误。
若数码管显示“C”(Crash),表示操作系统崩溃,应分析系统日志文件综合研判;或数码管显示“P”(Partition),则为系统分区错误,重新进行分区操作即可恢复。
教学内容(板书)红色/橙色2Hz指示灯闪烁,此时为系统临时性错误。
若数码管显示“E”(Error),表示CF卡出现读取错误,显示“E.”表示写入错误;数码管显示“F”(Full),表示CF卡已满。
永久性错误将导致系统不能正常启动,一般需要对NCK进行系统及数据恢复;临时性故障一般可以继续启动,但是系统存在的问题将继续保留,直至维修人员进行修复。
若RDY错误时,应结合七段位数码管组合进行判断,七段数码显示管显示信息说明见下表。
显示1或2时,需要通过使用 NCK 开关位置 1 或 2 进行启动来执行常规重置操作。
显示PLC时,将PLC开关调至位置5。
升级持续约15秒并以字母轮转的方式显示,此时切勿关闭电源。
升级结束后,“PLC”显示消失。
将 PLC 开关调至位置3后,可继续进行 PLC 复位。
教学内容(板书)(3)开机调试开关NCK中用于开机调试的开关主要有三个,NCK及PLC旋转开关以及“RESET”按键开关,如图所示,NCK开关功能见表1,PLC开关功能见表2,“RESET”按键开关需配合NCK开关、PLC开关使用。
NCK开关表1 NCK开关功能表2 PLC开关功能教学内容(板书)(1)驱动系统自动升级1)若数控系统中有NX模块,首先应升级NX模块的固件,如图所示。
NX模块自动升级过程2)检查所有驱动系统的部件,固件不一致时,自动升级固件,如图所示。
驱动部件自动升级过程3)升级完成后,系统会出现120406、201416、201007等报警,如图所示,完成断电重启步骤后报警消除。
驱动升级完成教学内容(板书)(2)驱动系统出厂设置系统初次调试必须做驱动系统的出厂设置,以保证系统达到调试要求。
1)启动出厂设置打开“菜单”——>选择“调试”——>“驱动系统”,启动驱动配置。
2)选择出厂设置如下图所示,点击“出厂设置”后,出现三个选项:“当前驱动对象”、“驱动设备”、“驱动系统”。
当前驱动对象——将当前光标所在位置的驱动参数恢复出厂设置;驱动设备——将当前的驱动控制器(CU或NX)恢复出厂设置;驱动系统——将NCU控制系统的所有驱动控制器(CU+NX)恢复出厂设置。
CU(Control Unit)是S120驱动器的控制单元。
出厂设置菜单3)驱动系统保存数据,NCK RESET系统自动关机重启。
2.驱动系统的拓扑识别840D sl系统的驱动组件带有电子铭牌功能,接入S120驱动器的组件可以进行系统的自动识别,此功能称为系统的拓扑识别。
拓扑识别功能的出现大大简化了机床厂商及维修人员的操作流程,提高效率且更符合人性化的操作要求。
在一般进行配置的过程中,建议首先进行拓扑识别,之后再将识别不出来的组件进行手动配置。
教学内容(板书)教学步骤、方法时间自动拓扑识别操作过程,如图所示。
(1)首次自动开机调试,自动拓扑识别出厂设置完成后,系统上电出现120402报警“总线003.从机003:CU_I_003:SINAMICS需要首次开机调试”,系统将自动进行拓扑识别,此时按“确认”按键。
(2)拓扑识别过程中,严禁进行取消,否则将出现拓扑错误。
(3)已按电子铭牌自动识别出驱动组件,保存设置并重启。
(4)拓扑识别过程结束。
1 23 4首次开机自动拓扑过程(5)查询拓扑结果,选择“调试”——>“驱动系统”——>“显示拓扑”,如图所示。
拓扑结果及显示教学内容(板书)教学步骤、方法时间3.电源模块配置电源模块和电机模块负责为伺服电机供电,且所有电机模块都必须连接到DRIVE-CLiQ总线系统。
(1)电源模块简述驱动系统的电源模块需要三相交流电源,交流电源经过整流变为直流电源,然后通过直流母线汇流排给电机模块供电,如图所示。
而电机模块将直流母线变回可控交流电源,用于驱动伺服电机。
直流母线汇流排(2)启动电源模块配置过程启动电源模块配置过程,如下图所示。
1)选择“调试”——>“驱动系统”——>“供电”。
2)选择“更改”,开始配置电源模块。
当系统存在多个电源模块时,勾选“ 开关电源模块的LED,使其闪烁用于识别”,此时电源模块上的LED灯开始闪烁,可以通过观察确认选择是否正确。
3)设置是否需要电网识别,一般情况选择默认即可,点击“下一步”。
4)设置进线接触器,保持默认选项,点击“下一步”。
5)点击“完成”结束配置,并进行断电重启,供电模块设置结束。
6)在配置完毕电源模块后,电机也已经做完初始化,不需另行配置了。
电源模块内为600V直流母线,操作前切记提醒学生不要用手摸,以免触电!教学内容(板书)电源模块配置过程4.驱动上电时序系统正确连接且电源模块配置好后,数控系统可以正常上电。
上电过程有一定的时序要求,否则系统将启动电源自动保护不能正常开机或异常上电导致电源模块损坏。
840D sl系统上电时序的使能主要有三种,OFF1、OFF2、OFF3,其中,与开机上电密切相关的主要是OFF1供电模块(Infeed)使能及OFF3驱动模块(Servo)使能。
系统上电时,先上供电模块使能OFF1,再上驱动模块使能OFF3;断电过程与上电相反,先断驱动使能OFF3,延时断开供电模块使能OFF1,OFF1和OFF3上电过程如下图所示。
上电时序问题为本节重点之一!此处需将OFF1、OFF2、OFF3的功能与时序讲清楚教学内容(板书)(1)OFF1使能上电过程:循环运行DB10.DBX108.5后,驱动准备好NCU X132.10信号。
OFF1为从0—>1的单位阶跃信号,ALM(含Drive-CLiQ)供电模块运行正常,此时NCU X132.09信号为1。
供电模块的RDY显示为绿色。
SLM(不含Drive-CLiQ)供电模块硬件接口有Ready信号输出。
(2)OFF3使能上电过程:供电模块运行正常,NCU X132.9信号为1,OFF3信号正常输出。
系统上电时序图注:OFF1——给定信号斜坡下降直到停止,然后变频器输出断电;OFF2——变频器直接断电,电机自由滑行停车;OFF3——快速的斜坡下降,然后变频器停止时断电。
3.3第二编码器配置机床的控制方式主要有三种:开环控制、半闭环控制及全闭环控制。
开环控制结构简单且精度较低,数控机床一般很少使用,不在本书讨论范围当中。
半闭环控制精度较高,将旋转编码器返回的数值通过计算的方法得到执行元件的位移。
其调试、控制较方便,但无法忽略由于机械部分磨损带来的精度误差,用于成型精度要求不高的中端机床。
此节为本章重点,讲解后可配合学会进行实训操作。
1h教学内容(板书)全闭环控制精度高,一般由旋转编码器测量电机旋转参数,光栅尺测量执行元件终端实际位移。
其调试及控制复杂,适用于对零件精度要求较高的中高端机床。
半闭环控制与全闭环控制的一大区别,就是编码器的数量不同。
在机床机械刚性及结构允许的情况下,配置第二编码器,即为提升机床加工精度的一种方法。
1.启动第二编码器配置选择“调试”——>“驱动系统”——>“驱动”——>“驱动+”或“驱动-”进行驱动轴的切换,选择“更改”,直至出现电机编码器配置,勾选“ 编码器2”。
第二编码器的选择过程如图下所示,点开下来箭头后有已经进行物理连接的编码器选项,按照类型及型号进行选择。
可以通过勾选编码器模块的LED等进行确认。
若编码器连接在最后一个电机模块上,则系统默认将此编码器设置为这个电机模块控制轴的第二编码器。
此时,应先将“编码器2”方框里的对勾消去,将第二编码器变成未连接状态,再将其分配给相应的轴驱动。
第二编码器的选择2.配置编码器参数编码器常用种类有增量式编码器和绝对式编码器。
DRIVE-CLiQ 接口的所有类型编码器可以自动识别,无需进行参数配置。
非DRIVE-CLiQ接口的绝对式编码器可以自动识别,也不需要进行参数配置;增量式编码器不能即插即用,需要进行参数设置。
若需要进行编码器参数方面变更,请参阅下一章关于编码器参数设置部分。
教学内容(板书)3.第二编码器的新增与取消勾选编码器2后,出现下图所示界面,此时发现并未识别增量式编码器。
选择“输入数据”,会出现编码器设置界面。
根据连接的编码器类型选择“旋转”或“直线”,在“分辨率”中输入编码器的线数。
结束设置后,点击“确认”。
配置编码器参数在新出现的界面如下图所示,选择“用户自定义”,点击“下一步”。
此时会出现“控制类型/设定值”界面,再次确认编码器的控制类型是否与设计一致,报文类型保持默认“西门子报文136”即可,确认无误后点击“下一步”。