SDH指针调整机理
SDH 指针调整技术的研究
SDH 指针调整技术的研究【摘要】本文首先讲述了SDH 的指针调整原理, 并举例说明了指针调整时指针字节各比特状态的变化过程, 接着论述了指针调整对PDH 支路信号所造成的传输损伤。
关键词: SDH,指针调整,抖动【abstract 】this paper tells the story of SDH pointer adjustment principle, and illustrates a pointer to adjust the pointer bytes each bit, the change of state process, then discusses the pointer to adjust PDH branch by the signal transmission damage.Keywords: SDH, pointer adjustment, wobble一、PDH 系统的速率调整—码速调整众所周知, 在PDH 系统中, 当低次群复接成高次群时(例如4 个异源基群复接成二次群) , 因各支路信号的速率有误差, 所以对异源基群信号的复接首先要解决的问题就是使各基群信号要有相同的数码率, 这一过程叫码速调整。
码速调整技术实际上是把参与复接的各支路信号码流调整为同步码流, 然后把这些码流实施同步复接。
码速调整技术最常用的是正码速调整, 此外, 还有负码速调整和正/零/负码速调整。
例如, 在PCM 二次群的复接过程中, 先将4 个支路信号为2. 048±50 ppm (M bit/s )的速率用正码速调整法调到2.112M bit/s ,再将4 个支路信号复接成为8.448M bit/s 。
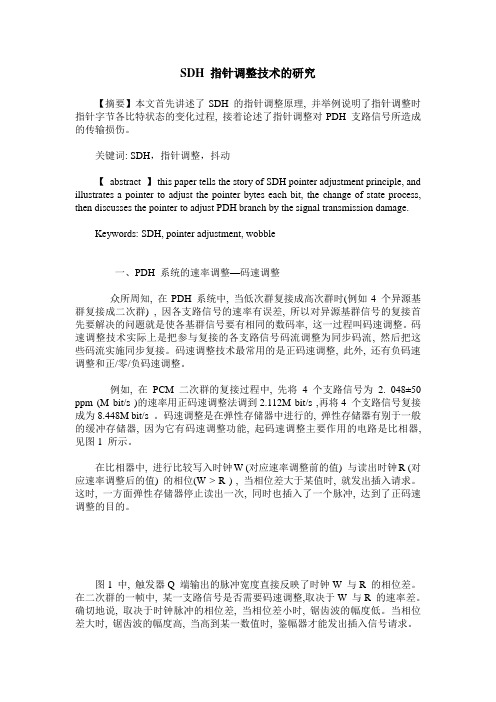
码速调整是在弹性存储器中进行的, 弹性存储器有别于一般的缓冲存储器, 因为它有码速调整功能, 起码速调整主要作用的电路是比相器, 见图1 所示。
在比相器中, 进行比较写入时钟W (对应速率调整前的值) 与读出时钟R (对应速率调整后的值) 的相位(W > R ) , 当相位差大于某值时, 就发出插入请求。
SDH原理(华为)-第3章__开销和指针
第三章开销和指针P目标掌握通道层监控的实现通道开销各字节功能了解指针AU-PTR½¨Á¢SDH监控层层细化的概念监控的分类可分为段层监控段层的监控又分为再生段层和复用段层的监控由此实现了对STM-N层层细化的监控再生段开销对整个STM-16信号监控高阶通道开销再将其细化成对每个STM-1中VC4的监控由此实现了从对2.5Gbit/s级别到2Mbit/s级别的多级监控手段这些监控功能是怎样实现的呢3.1.1 段开销STM-N帧的段开销位于帧结构的行1-9N×¢ÎÒÃÇÒÔSTM-1信号为例来讲述段开销各字节的用途段开销包括位于帧中的行1-95-9列的MSOH图3-1 STM-N 帧的段开销字节示意图图3-1中画了再生段开销和复用段开销在STM-1帧中的位置区别在于监控的范围不同STM-NSTM-1定帧字节A1和A2定帧字节的作用有点类似于指针我们知道SDH 可从高速信号中直接分/插出低速支路信号原因就是收端能通过指针AU-PTRµ«Õâ¸ö¹ý³ÌµÄµÚÒ»²½ÊÇÊն˱ØÐëÔÚÊÕµ½µÄÐźÅÁ÷ÖÐÕýÈ·µØÑ¡Ôñ·ÖÀë³ö¸÷¸öSTM-N 帧然后再在各帧中定位相应的低速信号的位置要先定位到某一个方队A1ͨ¹ýËü·ÖÀë³öSTM-N 帧收端是怎样通过A1A1Ò²¾ÍÊÇÓй̶¨µÄ±ÈÌØͼ°¸1111011000101000µ±·¢ÏÖÁ¬Ðø³öÏÖ3N 个f 6HÔÚSTM-1帧中A1和A2字节各有3个就断定现在开始收到一个STM-N 帧来区分不同的STM-N 帧当N=1时当连续5帧以上sA2字节区分出不同的帧那么收端进入帧失步状态若OOF持续了3ms则进入帧丢失状态设备产生帧丢失告警LOF Õû¸öÒµÎñÖжÏÄÇôÉ豸»Øµ½Õý³£×´Ì¬STM-N信号在线路上传输要经过扰码但又为了在收端能正确的定位帧头A1又不能将A1Ϊ¼æ¹ËÕâÁ½ÖÖÐèÇó1行不仅包括A1²»ÈÅÂëSTM-N帧中的其余字节进行扰码后再上线路传输又便于收端分离STM-N信号再生段踪迹字节以便使接收端能据此确认与指定的发送端处于持续连接状态而在不同两个运营者的网络边界处要使设备收通过J0字节可使运营者提前发现和解决故障J0字节还有一个用法用来指示每个STM-1在STM-N中的位置指示该STM-1是STM-N中的第几个STM-1ºÍ¸ÃC1在该STM-1帧中的第几列A2字节进行帧识别数据通信通路字节可通过网管终端对网元进行命令的下发完成PDH系统所无法完成的业务实时调配性能在线测试等功能用于OAM功能的数据信息下发的命令是通过STM-N帧中的D1-D12字节传送的由STM-N信号在SDH网络上传输的作为嵌入式控制通路的物理层管理OAM¹¹³ÉSDH管理网的传送通路D1-D3是再生段数据通路字节64kbit/s用于再生段终端间传送OAM信息DCCM共9用于在复用段终端间传送OAM信息它为SDH网络管理提供了强大的通信基础公务联络字节语音信息放于这两个字节中传输用于再生段的公务联络用于终端间直达公务联络图3-2 网络示意图若仅使用E1字节作为公务联络字节BD四网元均可互通公务因为终端复用器的作用是将低速支路信号分/插到SDH信号中因此用E1ÔÙÉúÆ÷×÷ÓÃÊÇÐźŵÄÔÙÉú所以用E1字节也可通公务那么就仅有AÒòΪB也就不会处理E2字节使用者通路字节保留给使用者用于特定维护目的的临时公务联络比特间插奇偶校验8位码BIP-8B1位于再生段开销中监测的机理是什么呢若某信号帧由4个字节A1=00110011A3=10101010那么将这个帧进行BIP-8奇偶校验的方法是以8bit为一个校验单位每字节为一块按图3-3方式摆放整齐若为奇数B否则填0ÕâÖÖУÑé·½·¨¾ÍÊÇBIP-8奇偶校验因为保证的是1的个数为偶B1字节的工作机理是第N帧将结果放在下一个待扰码帧中的B1字节第N帧所得的结果与下一帧解扰后的B1字节的值相异或比较根据出现多少个1&技术细节因此STM-N信号的误码情况实际上是误码块的情况校验结果的每一位都对应一个比特块因此B1字节最多可从一个STM-N帧检测出传输中所发生的8个误码块每位对应一列比特一个块24位的字节只不过它检测的是复用段层的误码情况一个STM-N帧中只有一个B1字节STM-1复用成STM-N时段开销的复用间插情况时你就会知道了而B2字节是对STM-N帧中的每一个STM-1帧的传输误码情况进行监测每三个B2对应一个STM-1帧RSOH包括在B1对整个STM-N帧的校验中了结果放于本帧待扰STM-1帧的B2字节位置其结果与下一STM-1帧解扰后的B2字节相异或可检测出的最大误码块个数是24个在发端写完B2字节后有3N个B2在收端先将STM-N信号分间插成N %STM-1信号APS K1b1-b5APSÓÃÓÚ±£Ö¤É豸ÄÜÔÚ¹ÊÕÏʱ×Ô¶¯Çл»ÓÃÓÚ¸´Óöα£»¤µ¹»»×ÔÓúÇé¿ö复用段远端失效指示字节b6-b8由收端回送给发端也就是说当收端收信劣化以使发端知道收端的状态若收到的K2的b6-b8为111´ËʱҪÏò¶Ô¶Ë·¢MS-RDI信号S1不同的比特图案表示ITU-T的不同时钟质量级别以此决定是否切换时钟源S1的值越小MS-REI M1这是个对告信息M1字节用来传送接收端由BIP-N B2ÒԱ㷢ËͶ˾ݴËÁ˽â½ÓÊն˵ÄÊÕÐÅÎóÂëÇé¿ö国内保留使用的字节B诀窍往往会利用STM帧中段开销的未使用字节来实现一些自己设备的专用的功能MSOH的各字节的使用方法通过这些字节N个STM-1帧通过字节间插复用成STM-N帧字节间插复用时各STM-1帧的AU-PTR和payload的所有字节原封不动的按字节间插复用方式复用段开销的复用规则是N个STM-1帧以字节间插复用成STM-N帧时A2指针和净负荷按字节交错间插复用进行STM-4外再重新插入STM-4相应的开销字节中SDH原理第三章开销和指针3-4是STM-4帧的段开销结构图有NÒòΪB2为BIP-24检验的结果3D12各一个字节E2各一个字节K1ÏëÏë¿´ÕâÊÇΪʲô图3-5 STM-16 SOH 字节安排3.1.2 通道开销段开销负责段层的OAM 功能就类似于在货物装在集装箱中运输的过程中SOH还要知道集装箱中某一件货物的损坏情况宽窄监测货物的大小通道开销又分为高阶通道开销和低阶通道开销可对140Mbit/s 在STM-N 帧中的传输情况进行监测也就是监测2Mbit/s 在STM-N 帧中的传输性能VC3中的POH 依34Mbit/s 复用路线选取的不同其字节结构和作用与VC4的通道开销相同故在这里就不对VC3的POH 进行专门的讲述了SDH原理第三章开销和指针1. 高阶通道开销个字节共9 Array图3-6 高阶通道开销的结构图通道踪迹字节AU-PTR指针指的是VC4的起点在AU-4中的具体位置以使收信端能据此AU-PTR的值J1正是VC4的起点该字节的作用与J0字节类似使该通道接收端能据此确认与指定的发送端处于持续连接Array状态华为公司的设备默认的发/收J1字节的值是OptiX HuaWei 622分别对应华为的155 HuaWei OptiX 对应华为的2500传输设备更改B3Ò²¾Í¼à²â140Mbit/s的信号在STM-N帧中传输的误码性能B2相类似若在收端监测出误码块HP-BBEÏÔʾÏàÓ¦µÄÎó¿éÊýHP-REIÏÔʾ³öÊÕ¶ËÊÕµ½µÄÎó¿éÊýB2字节也与此类似&技术细节在本端的性能事件RS-BBEÏÔʾB1检测出的误块数在本端的性能事件MS-BBEÏÔʾB2检测出的误块数节失配此两种告警都会使设备向该VC4的下级结构TUG3插全码TU-AIS告警指示信号G1´Ó¶øÔÊÐíÔÚͨµÀµÄÈÎÒ»¶Ë»òͨµÀÖÐÈÎÒ»µã¶ÔÕû¸öË«ÏòͨµÀµÄ״̬ºÍÐÔÄܽøÐмàÊÓG1字节实际上传送对告信息使发端能据此了解收端接收相应VC4通道信号的情况b4回传给发端由B3检测出的VC4通道的误块数2. 低阶通道开销当然它监控的是VC12通道级别的传输性能低阶通道开销放在VC12的什么位置上呢由4个VC12基帧组成一组低阶通道开销共有4个字节J2K4V5TU-PTR 指示的是VC12复帧的起点在TU-12复帧中的具体位置V5具有误码校测从这看出V5字节具有高阶通道开销G1和C2两个字节的功能远端接收失效指示(从前叫FERF)成功则发0±íʾ¾»¸ººÉ×°ÔØÇé¿öºÍÓ³É䷽ʽ000 未装备VC 通道001 已装备VC 通道BIP-2检测到误码块就向VC12通道源发1误码监测第一个比特的设置应使上一个VC-12复帧内所有字节的全部奇数比特的奇偶校验为偶数87654321远端接收失效指示信号标记远端故障指示远端误块指示若收端通过BIP-2检测到误码块低阶通道背景误码块同时由V5的b3回送给发端LP-REI3.2 指针指针的作用就是定位进而通过拆VCÒ²¾ÍÊÇ˵ʵÏÖ´ÓSTM-N信号中直接下低速支路信号的功能定位是一种将帧偏移信息收进支路单元或管理单元的过程或管理单元指针或高阶VC帧的起点在AU净负荷中在发生相对帧相位偏差使VC帧起点时从而始终保证指针值准确指示VC帧起点位置的过程AU-PTR指的是J1字节的位置TU-PTR指的是V5字节的位置动态的方法而且能够容纳帧速率上的差别分别进行高阶VC和低阶VC在AU-4和TU-12中的定位3.2.1 管理单元指针AU-PTR的位置在STM-1帧的第4行1ÓÃÒÔָʾVC4的首字节J1在AU-4净负荷的具体位置如图3-9所示图3-9 AU-4指针在STM 帧中的位置从图中可看到AU-PTR 由H1YYH2FFH3H3H3九个字节组成1001SS11F指针的值放在H13个字节为一个调整单位一个货物单位以货车运货为例当然装载时是以一个字节一个字节来装载的s当VC4的速率高于AU-4的速率时相当于装载一个VC4的货物所用的时间少于125货车停站时间由于货车还未开走这时AU-4这辆货车的车箱已经装满了此时将3个H3字节的位置用来存放货物那么以便在AU-4中加入更多的货物3个字节为一个单位这种调整方式叫做负调整叫做负调整位置这种调整方式也就是将应装于下一辆货车的VC4的头三个字节装于本车上了当VC4的速率低于AU-4速率时这时就要把这个VC4中最后的那个3字节货物单位这时出于AU-4未装满VC4Ϊ·ÀÖ¹ÓÉÓÚ³µÏäδÈûÂú¶øÔÚ´«ÊäÖÐÒýÆð»õÎïÉ¢ÂÒ´ËʱH3字节中填充伪随机信息3字节于是这些货物单位的位置也会发生相应的变化相应的插入3个H3字节的位置叫做正调整位置要在AU-4净负荷区加入不止一个正调整单位负调整位置只有一个正调整位置在AU-4净负荷区不管是正调整和负调整都会使VC4在AU-4的净负荷中的位置发生了改变这时AU-PTR也会作出相应的正为了便于定位VC4中的各字节在AU-4净负荷中的位置如图3-10所示然后依次后推9/3而AU-PTR指的就是J1字节所在AU-4净负荷的某一个位置的值AU-PTR的范围是0~782µ±ÊÕ¶ËÁ¬Ðø8帧收到无效指针值时AU指针丢失并往下插AIS告警信号那指针值也就随着正调整或负调整进行+1»ò-1²Ù×÷在VC4与AU-4无频差和相差时AU-PTR的值是522注意AU-PTR所指的是下一帧VC4的J1字节的位置因而H3字节大部分时间填充的是伪信息我们讲过指针的值是放在H1H2字节的后10个比特当AU-PTR的值不在0~782内时H1H2的16个比特是如何实现指针调整控制的呢设置为调整ÏàÓ¦µØÔö¼õ收端对指针解码时将忽略任何指针的变化NDF¾»¸ººÉÎޱ仯ʱ01101001Èô¾»¸ººÉ²»Ôٱ仯图3-10 AU-4中H1和H2构成的16bit指针码字指针值由H1Õâ10个bit中奇数比特记为I比特以5个I比特和5个D比特中的全部或大多数发生反转来分别表示指针值将进行加1或减1操作D比特叫做减少比特也就是说若从指针反转的那一帧算起其下一帧的指针值将进行加1或减1操作NDF反转表示AU-4净负荷有变化即指针增减的步长不为1Ôò´ËʱÉ豸³öÏÖAU-LOP告警也就是说系统自认为指针调整后的3帧指针值一致在收端将出现VC4的定位错误概括地说发端5个I或5个D比特数反转收端根据所收帧的大多数I或D比特的反转情况决定是否对下一帧去调整3.2.2 支路单元指针TU指针用以指示VC12的首字节V5在TU-12净负荷中的具体位置TU-12指针为VC12在TU-12复帧内的定位提供了灵活动态的方法V2V4处9图3-11 TU-12 指针位置和偏移编号TU-12 PTR由V1V3和V4四个字节组成从紧邻V2的字节起依次按其相对于最后一个V2的偏移量给予偏移编号0等139个偏移编号该编号对应的二进制值即为TU-12指针值其后的那个字节为正调整字节指针值在V1V1注意位置的正/负调整是由V3来进行的可知指针值的范围为0若连续8帧收到无效指针或NDF支路单元指针丢失并下插AIS告警信号相差时也就是说此时的TU-PTR的值为70这部分你学了些什么2. 跟指针有关的告警其中2. 要重点掌握小结本节主要讲述了SDH体制信号监控的实现MSOHLP-POH实现层层细化监控机制需重点掌握的是字节对告警和性能的检测机理MS-RDI是由什么字节检测的3. 当收端检测出AU-PTR为800或1023时4. 哪几个字节完成了层层细化的误码监控。
SDH原理简答题名词解释

SDH原理简答题(答案)二、名词解释1、异步复用方式和同步复用,字节间插复用异步复用方式:利用固定位置的比特塞入指示来显示塞入的比特是否载有信号数据,允许被复用的净负荷有较大的速率差异。
同步复用方式:利用低速信号在高速信号中的特殊位置来携带低速同步信号,要求低速信号和高速信号同步。
字节间插复用:SDH复用工程中通过字节交错间插方式把TU组织进高阶VC或把AU组织进STM-N的过程,同步复用的一种。
2、异步映射和字节同步映射异步映射:对映射结构无任何限制,无需网同步,利用码速调整将信号适配进VCde映射方式。
字节同步映射:字节同步映射是一种要求映射信号具有字节为单位的块状帧结构,并与网同步,无需任何速率调整即可将字节装入VC内规定位置的映射方式。
3、浮动模式映射和锁定模式映射浮动模式映射:VC净负荷在TU内的位置不固定,由TU-PTR指示VC起点的一种工作方式。
锁定模式映射:一种净负荷与网同步并处于TU帧内的固定位置。
4、一致路由和分离路由一致路由:正负向业务路由相同的称为一致路由,如双向链或双向复用段环的业务;分离路由:正负向业务路由不同的称为分离路由,如单向通道环或单向复用段环的业务。
5、1+1和1:1保护1+1:发端在主备两个信道上发同样的信息(双发),收端在正常情况下收主信道上的业务,当主信道损坏时,切换选收备用信道,又叫单端倒换(仅收端切换),往往是非恢复式的。
1:1:正常时,主用信道发主要业务,备用信道发额外业务(低级别业务),收端从主用信道收主要业务,备用信道收额外业务;当主用信道损坏时,发端将主业务切换到备用信道上,收端切换从备用通道收主用业务,此时额外业务中断,主用业务恢复,属于双端倒换,1:1 模式是恢复式的。
6、接收过载功率接受光功率高于结束灵敏度时,接收机进入非线性工作区,BER下降,定义为达到1E-10的BER值所需的平均接受光功率的最大值。
7、主从同步和伪同步主从同步:网内设一时钟主局,配有高精度时钟,网内各局均受控于该全局,并且逐级下控,直到网络的末端网元--终端局。
光纤通信技术SDH的其指针调整
V1
V2
V3
VC-12
VC-12
VC-12
V4 VC-12
(1)
(2)
◆
(3)
(4)
光纤通信技术
指针的基本结构
? TU-12 PTR的结构
V1
V2
V3
NNNNSSID I D I D I D I D
新数据标识 (正常值:0110; 新数据标识:1001)
?
TU规格 (10)
指针值 (0~139)?
0
9
H1H2H3
帧偏移量编号规则:
86 764
VC-3
提问:如果指针值=0,则
VC-3的第一个字节(J1)在 什么地方呢?
答案:在帧偏移量为0
VC-3
(H3字节之后)处!
◆
光纤通信技术
(3)AU-4 PTR
? AU-4结构回顾
1
9
1
4
AU-4 PTR
9
VC-4
指针的基本结构
270
◆
光纤通信技术
指针的基本结构
H1
H2
NNNNSSID I D I D I D I D
新数据标识 (正常值:0110; 新数据标识:1001)
?
AU规格 (10)
指针值 (0~782)?
H3H3H3
负调整机会 调整时,内 容为数据; 不调整时, 内容不定。
正调整机会调 整时,内容为 插入字节;不 调整时,内容 数据。?
说明:指针值为0时,表示VC-4的第一个字节位置 是从紧跟在3个H3之后的字节(即第二个VC-4帧第 四行的第一个字节位置)开始的,……。
◆
指针的基本结构
(2)TU-3 PTR
SDH 光同步数字传输技术第一章5 指针技术

第五节指针技术指针技术是sDH中应用的计算机技术之一。
在计算机中我们用指针来指示存放数据的位置,以便存取;在SDH的映射复用过程中,由于信息流是连续的,只需用指针来记录数据信息VC—n在相应的Au或TU帧中的起点(第一个字节)的位置,就可使信息流在相应的帧中灵活动态地定位。
从而方便地进行速率和相位的适配(调准)。
具体地说指针的作用主要有三个:1)当网络处于同步工作状态时,指针用来进行同步信号间的相位校准。
网络处于同步工作状态时,SDH网中的各网元工作在相同的时钟下,从各个网元发出的数据传输到某个网元时,速率相等,故无需进行速率适配,但是传输的途径不同,相位并不完全相同,因而需要进行相位校准。
2)当网络失配时,指针用作频率和相位的校准。
网络失去同步或异步工作时,不同网元工作的频率有偏差,需要频率校推,瞬时来看就是相位往单一方向变化,即单调地增加或减小,频率校准伴随相位校准。
3)指针还可以用来容纳网络中的频率抖动和漂移。
SDH指针包括AU—4指针、TU—3指针和TU—12指针三种。
一.VC-4/VC-3在AU-4/TU-3中定位以AU-4为例将界定为过程AU—4指针是用来指示VC—4在AU—4中起点位置的,从而使AU—4指针既能容纳VC—4和AU—4在相位上的差异,又能容纳帧速率上的差别。
1. AU-4指针的位置和值位置:AU—4指针位于第四行的头九个字节中(H1 Y Y H2 1* 1* H3H3H3)。
✓H1和H2:H1和H2是指针,并且合在一起使用,可以看成一个字码,✓3个H3字节:为负调整机会字节,进行负调整时,H3传送VC—4的字节。
✓STM—1净负荷编号: 相邻三个子结尾一个编号, 从0 到782(261 *9/3).✓VC—4的起点可以是0—782人一编号处. 一般要延伸倒下一帧指针值包含在Hl和H2中,H3 为负调整机会字节,Y和1‘填有固定内容。
H1和H2可视为一个字码编号与字节的对应:指针码字的构成(H1H2-16比特)2.偏移量引起的指针调整H1、H2的后10比特为指针值,即为VC—4起点编号的二进制值。
sdh的低阶指针调整的容限

sdh的低阶指针调整的容限说到SDH,咱们就像聊到了一个神秘又复杂的“黑盒子”——一边跟它打交道,一边又不知道它背后到底藏了什么玄机。
不过,今天咱不聊那些看起来难懂的技术术语,而是来聊聊SDH里低阶指针调整的容限。
是不是听起来就有点高大上呢?换成咱们日常的语言来说,就是在谈怎么通过调节某些“指针”来保证传输系统的稳定性和可靠性,避免一不小心就让数据“掉链子”。
你可能会问,低阶指针到底是啥?别急,简单说,这个低阶指针其实就像是你每天开车时的后视镜,虽然不怎么显眼,但它却是帮助你保持正确方向、避免撞车的关键部件。
SDH系统中,低阶指针就负责在不同的传输路径间调整和优化信号。
如果这些指针调整得不好,传输就可能出问题,那就麻烦了。
你看,有时候我们开车不就经常习惯性地调整后视镜吗?别看它不起眼,可要是调得不对,后面就啥也看不清,直接“开盲车”,那岂不是自己找麻烦?这跟SDH里低阶指针的作用可有得一比。
低阶指针调整的容限到底是啥意思呢?容限,通俗来说,就是指这东西在正常范围内波动的“自由度”。
比如你开车的时候,后视镜是不是可以稍微调一下,左一点右一点,或者微调一下角度,反正你只要不偏离太多,还是能看到车后的一切情况。
这就是容限。
SDH系统中的低阶指针容限,指的就是这些指针可以调整的范围和幅度,只要不超出这个范围,系统就能正常运行,不会受到干扰或失控。
问题来了,容限是不是越大越好呢?哈哈,别看这个词很大,其实大可不一定好。
太大的容限其实是个隐患。
就像开车时后视镜调得太随便,反而可能造成误差。
低阶指针的容限如果设置得过大,系统可能就会变得不那么稳定,传输质量也会受到影响。
你想,数据传输不就像是“高速公路上的车流”吗?如果指针调整幅度太大,就像在车流中开快车,别说安全了,连自己都可能被甩到沟里去。
所以,适当的容限才是关键,既要有一定的调整空间,又要保证不让系统“乱开车”。
但你问,什么样的容限才是最合适的?哦,这就像做饭加盐,不能太咸也不能太淡,要合适。
SDH原理知识小结1帧9270N个字节,分为再生段、复用段、指针和净
SDH 原理知识小结1 帧9*270*N个字节,分为再生段、复用段、指针和净负荷区每秒传输8000帧,故一个STM-1的带宽为155.520Mbits/s1.1 再生段1.1.1 A1 A2 为定帧字节,设定为F6H、28H,若接收端连续625us收不到该字节,则发出OOF告警;若OOF持续3ms以上,则发出LOF告警,同时下插AIS告警。
LOF下若正常接收1ms,则恢复正常发送定帧字节时从最高有效位开始发送.1.1.2 J0 再生段踪迹字节用来重复发送段接入点标志符(APID),以使接收段据此确认与发送端处于连续的连接状态。
1.1.3 B1 BIP-8BIP,Bit Interleaved Parity,比特间插奇偶校验。
发送端对本帧受扰后的信号进行BIP-8,结果放在下帧待扰信号的B1;接收端对本帧的未解扰信号进行BIP-8,结果与下帧解扰后的B1比较,可得出误码的个数。
误码个数由本段的RS-REI显示。
BIP-8的结果为1-8。
B1对所有信号的字节都进行BIP校验。
1.1.4E1 公务联络字节用于再生段的公务联络,REG只处理RSOH。
1.1.5 F1 使用者通路字节1.1.6 D1-D3 DCC 数据通信通路用来传送再生段OAM信息1.2 复用段●B2 N*24对除了RSOH的所有字节进行BIP校验,每三个字节位一个单位,故最大值为24。
收端检测到B2 ,在本端MS-BBE显示误码数,并在发端MS-REI显示相应的误码数,由M1发送。
若误码超限,则●K1 K2b 1-b5 为自动保护倒换(APS)K2(b6-b8)MS-RDI,复用段远端劣化指示,向发送端回送一个指示,表示接收端已经检测到上游失效或受到了MS-AIS。
MS-RDI用解扰后的b8-b8表示。
●若收到为110,则表示对段已经检测到本端失效从而发送的MS-RDI若收到111,则此信号为本端收到的MS-AIS信号,此时要向对段发送MS- RDI,即往发往对端帧中的K2填入110●D4-D12用来传送复用段OAM信息●S1 同步状态字节●M1 MS-REI用来向发送端传送B2检测到的误码数●E2复用段公务联络字节1.3高阶通道●J1通道踪迹字节用来重复发送通道接入点字节,以便接收端能据此确认与发送端处于连续的连接状态。
对华为SDH设备指针调整的理解
复用成 l 6个 S M一1 图 2 T ( A点 ) 然 后 以 S M一1为基 本单 , T 位进行帧定位、 开销处理和 指针调整等一 系列操 作 , 后送 最 到交叉板的也不是 V , 构 , 然 是 S M一1结 构 ( 2 C 4结 仍 T 图 D
点 ) 此 时 V 4在 S M 一1中是 浮 动 的 。 , C T
A B C
D
E V C4
D 1D 3 .
D4. 1 D 2
图 1 S H设 备 模 块 图 :D
收稿 日期 :0 0— 1— 7 2 1 0 0
2 6
Sr . 6 , 】 1
叉 板
STM . 6 1
图 2 S H 原 理 框 图 :D
指针调整是 在图 2中 B点到 C点之 间的模块 中进行的 ( 接受方 向) 。首先说 明的是该模块 的时钟是系统 时钟 提供 的( 请查阅华为有关 资料 ) 所 以 C点 的信 号流输出速 率与 , 下游各板总是 同步的。但 B点的信号 流速率与上游 网元相 同, 以如果本 网元 系统时钟 与上 游网元 时钟不 同步 时 , 所 B
配才 能完成信号的正常传送 。但 如果在接 收侧 S6进行指 1 针调 整的话 , 则下游各板 就没有必要进 行速率 匹配 了, 从而
省 了很 多 麻 烦 。
理论与实际的区别问题 了。我们先看理论 中的 S H设备模 D 块图( 1 , 图 ) 可见 D C字节 分 别在 R T和 MS C S T模块处 理 ,
资料显示华为公 司的 S H线路板确实是 在接 收侧进行 D
指 针 调 整 的 。那 么为 什 么 要 在 接 收 侧 进 行 指 针 调 整 呢 ?我
们先假设接收侧 S6不进行指针调整 , 1 那么在本网元系统时 钟上游站时钟不同步时 , 与上游站相连 的 S 6收到的信号流 1 在速率上与交叉板 、 下游发送侧线路板 、 支路板均不 匹配( 这
SDH的复用原理和映射方法
SDH的复用原理和映射方法如前所述,SDH技术有一系列标准速率接口,并具有前向和后向兼容性,允许接人各种不同速率的PDH信号、B—ISDN和ATM信号以及其他新业务信号。
因此,各种速率的业务信号复用进STM—N帧都要经历映射(Mapping)、定位(aligning)和复用(multiplexing)3个步骤。
由于各种支路信号间存在一定的差异,为了实现同步复用,在形成STM一1速率信号时,需要进行适配,即映射。
通过指针定位完成从STM—N帧中任意上、下一个支路信号。
复用过程一般可以分为2步走,第一步是将各种不同速率的信号复用到STM一1。
SDH应能传输各种不同速率、不同制式的数据流,包括异步传输模式(ATM)信号,因此第一步的复用过程较为复杂。
第二步是通过字节问插,将STM一1复用成高阶STM一』、『.由于STM一1和STM—N的速率成整数倍关系,是一个同步复用过程,实现很容易。
1.SDH的映射与复用结构图3—6—5是ITU—T G.707建议中给出的STM一Ⅳ的映射与复用结构。
从图中可以看出两种主要的PDH信号需要经过哪些处理过程,才能复用进 STM—N。
SDH的复用原理和映射方法如前所述,SDH技术有一系列标准速率接口,并具有前向和后向兼容性,允许接人各种不同速率的PDH信号、B—ISDN和ATM信号以及其他新业务信号。
因此,各种速率的业务信号复用进STM—N帧都要经历映射(Mapping)、定位(aligning)和复用(multiplexing)3个步骤。
由于各种支路信号间存在一定的差异,为了实现同步复用,在形成STM一1速率信号时,需要进行适配,即映射。
通过指针定位完成从STM—N帧中任意上、下一个支路信号。
复用过程一般可以分为2步走,第一步是将各种不同速率的信号复用到STM一1。
SDH应能传输各种不同速率、不同制式的数据流,包括异步传输模式(ATM)信号,因此第一步的复用过程较为复杂。
SDH光传输设备指针调整故障的研究
SDH光传输设备指针调整故障的研究摘要:SDH网络中指针的作用就是定位,通过定位使收端能正确地从STM-N中拆离出相应的VC,进而通过拆VC、C的包封分离出PDH低速信号,也就是说实现从STM-N信号中直接下低速支路信号的功能。
在实际工作中经常遇到由于SDH光传输设备指针调整,造成业务传输中断的情况,本文主要研究SDH光传输设备的指针调整机理、指针调整的检测上报、常见故障原因、故障定位方法以及分类故障的定位和排除。
关键词:AU-PTR、TU-PTR、SYN_BAD、LTI、SYNC_C_LOS、EXT_SYNC_LOS1.指针调整的机理SDH网络中要求各网元时钟同步——频率相同、相位相同,但在实际的网络中,完全的同步是不可能的。
在SDH网络中,通过两个层次的工作,来解决时钟的同步问题:首先通过时钟跟踪的方法,使得各网元时钟的频率在某一程度上保持同步;其次,通过指针技术,解决时钟的相位偏差问题和微小频偏问题。
SDH中的指针有两种,管理单元指针(AU-PTR)和支路单元指针(TU-PTR);与之对应的指针调整也有两种,AU指针调整和TU指针调整。
两种指针调整产生的机理基本都是相同的,下面分别说明。
1.1.AU指针调整产生机理如图1,AU帧中,在特定位置(第四行前9个字节)用若干个字节记载帧中相应数据信息的起始位置,即用它们来表征数据信息的相位,这些字节就是指针。
其中H1、H2是指针,H3,H3,H3是负调整机会,紧接最后一个H3字节后的连续三个字节为正调整机会。
9行10270列图注 Y字节: 1001SS11(S未规定)1*字节: 11111111图1 管理指针AU-PTR的位置和内容当网络处于同步状态时,指针用于进行同步信号之间的相位校准。
如果SDH的网元工作在相同的时钟下,从各个网元发出的数据传输到某个网元时,各个信号所携带的网元时钟的工作频率是相同的,所以无需速率适配。
但是从瞬时上看,可能忽快忽慢,因而需要进行相位校准。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
指针调整机理和问题处理专题
文档密级:内部
2020-03-11
华为机密,未经许可不得扩散 第1页, 共6页
指针调整机理和问题处理专题
华为技术有限公司
版权所有侵权必究
1 OptiX 系统指针处理结构
说明:
本资料适用于155/622&2500+等产品,因涉及到的内容较深,仅供大家深入
学习使用,不需掌握。
1.1 AU指针处理
1.1.1 接收方向:H1H2检测
开销处理模块SDX28 利用线路的时钟和帧头完成开销的检测和提取。
检测
H1H2,判断是否为NDF(新指针),如果不是则与指针寄存器(上一帧的
H1H2值)中的H1H2进行比较,判断是否有ID翻转指示,计算后进行AU
指针调整计数,将计数值累计到指针调整正或者负寄存器中,CPU轮询计算
并上报指针调整;如果连续3帧既不是NDF又没有ID翻转且与指针寄存器
值中上一帧的H1H2不同,则指针非法上报AU-LOP,如果H1H2全“1”,
则上报AU-AIS。
1.1.2 接收方向:时钟转换
SDX28利用线路的时钟和帧头完成开销的检测和提取,完成告警、误码和
指针调整的上报。
完成后用本站系统工作时钟将数据和帧头信号进行重新处
理,实现线路同步到设备同步的过度,使其可以在后面进行高阶通道连接
(XC)处理。
这里就存在一个线路时钟和本站系统工作时钟的同步问题,
SDX28使用FIFO对两者的同步进行协调,即输入时钟控制数据依次写入,
输出时钟控制数据依次读出,FIFO的总长16个字节。
1.1.3 接收方向:指针调整
线路时钟将帧头和数据以循环的方式顺序写入FIFO,本站系统38M时钟以
同样的方式顺序读出,两时钟写入和读出的起始地址分别为0字节和8字节
的起始位,保证起始位置差距最大。
第一种情况:如果此时系统38M时钟
快于线路时钟(此处快即指频率高于,慢指频率低于,同步表示频率相等),
则系统38M时钟的输出数据的FIFO地址逐渐逼近线路时钟的写入地址,当
地址差小于2个字节时,系统时钟的读出操作地址在下一帧的H3最后一位
的位置多停留24个周期不变,这样等于在数据结构的H3字节后插入了3
个字节,从而导致下一帧以后的J1的位置后移3个字节,在这插入的3个
字节的时钟周期,SDX28控制输出SPE信号为低电平,表示净荷无效。
第二种情况:如果此时系统时钟慢于线路时钟,则线路38M时钟的写入数
据的FIFO地址会逐渐逼近系统38M时钟的读出地址,当地址差小于2个字
节时在下一帧的H2最后一位的位置系统时钟读出地址向前跳过3个H3字
节,从而导致下一帧以后的J1的位置前移3个字节,这样等于下一帧数据
结构的H3字节后的数据前移了3个字节,此前移的3个数据字节输出的时
钟周期,SDX28输出的SPE信号为高电平,表示净荷有效;第三种情况,
如果系统38M时钟和线路38M时钟频率差较大,在进行调整的一帧中的逼
近速度超过2个字节,即16个38M时钟周期,则来不及到下一帧进行调整
就已经造成写入地址和读出地址的重合,重合的判断判定标准为两个地址差
小于2bit时,此时FIFO溢出,FIFO自动复位,两个地址又回到初始位置,
此帧数据丢失,产生误码;这就是我们组网中时钟严重不同步时产生误码的
原因;第四种情况,两个时钟频率正好相等,在FIFO中保持一定的地址差,
循环写入和读出数据,J1字节位置不产生变化。
1.1.4 接收方向:H1H2字节变化
应该说明的是此处输出的数据中开销字节和AU指针H1H2字节已经无效,
帧头信号变化为C1的位置输出,H1H2指针值变化为J1的位置输出,净荷
的位置变化为SPE的高电平输出,三个定位信号正交,输出C1J1SPE信号
作为数据的定位信号,与数据一起同步输出到SDX25。
1.1.5 接收方向:指针调整上报
应该注意!在我们目前用得最多的开销处理芯片SDX28中,接收方向存在
对AU指针的两次检测,一个是利用线路时钟对输入信号的H1H2的提取和
比较,另一个是J1位置信号的输出,两者都能表示指针值,但不同的前面
的仅是对线路接收的信号的原封不动的检测,而后面则是对信号进行同步处
理后(包括正负调整、FIFO溢出和良好同步三种)的指针值表示。
如果SDX28
根据FIFO读写情况发生指针调整,明显前面H1H2字节的检测比较和计数
与后面的这里指针调整无关,而后面所得到的J1的位置则为调整后的新值,
SDX28通过不同的寄存器对两个指针都进行了比较和指针调整累计,但
OptiX 128X的所有单板仅对前面的指针调整累计进行提取和上报。
因此不难
发现我们平常所见到的AU指针调整实际上来自上一站送来的H1H2,与本
站的时钟同步和指针调整没有关系。
1.1.6 发送方向:插入H1H2
利用系统38M时钟接收来自交叉方向接口芯片的数据和帧定位信号
C1J1SPE,C1J1SPE信号中的J1的位置与前一帧进行比较,如果提前于
前一帧J1位置,则表明发生了负调整,插入的H1H2设置为D翻转大于I
翻转,如果落后于前一帧的J1位置,则表明发生了正调整,插入的H1H2
设置为I翻转大于D翻转。
1.1.7 发送方向:VC4穿通
因此进行AU指针调整的STM-1如果以整个VC4的结构方式在本站穿通,
则不难看出本站所产生的调整直到此处才表现为H1H2的ID翻转,到下一
站才能够在开销处理模块检测到。
1.1.8 发送方向:VC4终结
但如果在本站此STM-1的帧结构就此终结,接收方向终结方式有两种,一
是为了进行低阶VC的时分或空分交叉,在交叉矩阵前经过了重定帧,重定
帧处理将J1位置固定为522,而将调整字节吸收到TU中去,重新排列了
VC的结构。
二是在支路板解复用时J1位置失效而吸收到TU中去(此种情
况仅在155/622/2500的外总线有);发送方向的J1的位置将固定是522,
第一种情况是STM-1通过时分或空分交叉来自其他线路,由于要进行TU的
时分或者空分,因此其他线路到交叉矩阵中的STM-1信号都经过重定帧处
理,J1的位置为522;第二种情况是业务来自支路板,则由于2M或者34M
合成STM-1信号时J1是重新插入的,位置也固定为522;所有业务终结
的情况将导致发送方向的J1的位置指针值固定为522,与接收方向的AU指
针调整与否已经无关,不管接收方向H1H2调整到什么值对发出的STM-N
结构中的H1H2的值都没有影响,下一站不会检测到调整,AU调整也就此
终结。
1.2 AU指针到TU的吸收
1.2.1 帧对齐处理
重定帧处理模块仅位于线路板的信号接收方向。
在接收点出现的是被终结掉段开销和高阶通道开销字节的STM-1信号,其
AU指针值已经吸收为C1J1SPE信号中的J1的电平位置,指针值的不定决
定了STM-1中J1位置的浮动,而STM-1信号中J1位置的浮动即VC4的
起始位置在AU4中的位置是不定的,这样如果VC4中承载的净荷是TU,
则整个STM-1中的与VC4结构对齐的各个TU位置是不定的,这样就无法
使此STM-1中的TU与交叉单元的TU对齐并进行TU级别交叉。
重定帧模
块通过J1位置的确定将AU4的指针值固定在522上,即C1字节之后的第
1个净负荷字节,则VC4出现在预定的相对于整个STM-1的位置,这样在
一个STM-1的帧结构中,所有的TU也都将出现在进行交叉所需要的预定的
列中,比如第一个VC12在VC4中占据第18列,81列,144列,207列;
第二个VC12在VC4中占据第19列,82列,145列,208列,送往交叉单
元进行交叉连接时可通过直接对某几列数据的交换来实现TU的时分或空分
交叉。
如果在一个VC4中所载的净负荷是C4,即整个VC4在本站穿通,
可以是东西向之间的穿通,也可以是高阶线路与低阶线路之间的穿通,或者
线路与支路之间的整个VC4业务交换,则所进行的交叉的单元是整个
155520kbit/s速率的STM-1信号(其中开销已经终结)的交叉,因而不需
要再进行定帧,采用旁路方式,便可送至交叉板进行交叉连接。
1.2.2 AU指针调整吸收到TU
当开销处理模块对AU指针进行调整时,表现在C1J1SPE信号中J1位置的
变化或者说数据信号中H3字节长度的增减。
SDX25的输入过程中首先通过
输入C1J1SPE信号中J1的位置得到H4,根据H4找到和刷新TU指针值,
TU指针根据需要进行调整(如果增加或减少的3个字节在TU指针和TU净
荷之间,则进行调整,如果在净荷内部则不调整),根据新的TU指针重新
生成H4。
然后要固定J1位置输出,这里要说明具体的固定J1的方式,SDX25
同样采用FIFO的进行处理,写入和读出的时钟都采用系统38M时钟,系统
时钟根据C1J1SPE信号中的SPE信号顺序写入全部净荷数据,而读则使用
系统时钟读出,根据参考帧头输出新的C1J1SPE信号中的C1位置,计数
到522时输出新的C1J1SPE中的J1位置,在J1位置后标准的位置输出
SPE,在输出SPE的同时直接将读出的数据(实际上为STM-1中的全部
净荷信号)输出。
这样等于不仅将J1的位置固定为522,而且将AU指针调
整所产生的3个无效字节的插入和数据的前提都恢复回了正常的位置。
新的
C1J1SPE信号和新结构的STM-1数据信号一起输出到SDX33接口芯片。