网络控制系统综述
基于网络控制系统的建模方法综述

2 8—
第1 6 期
N0.1 6
Q 生
无 线 互联 科 技 ・ 网 络 地 带
AugUSt,201 5
的合理假设, 通过模型 ( 1 ) 可得短时延的 / N C S 模型:
( ☆ 十1 ) 州 & ) +r 0 ( : r ,
( 詹 ) 《 詹 )
表1 N CS 节点状态与网络状态之间的关系
y ( t ) =C x ( t )
式中 ( f ) R , A , , 具有适当维数的矩阵。 在后续所有建模 过程中作合理假设, N C S 均满足以下条 件:( 1 ) 传感器采用周期采样时间驱动; 控制器和执行器都采 用事件驱动 。( 2 ) 系统的时钟同步问题不予考虑 。( 3 ) 在考虑 时延 问题时暂不考虑网络数据 包的丢包问题。( 4 ) 网络采 用
步的 指出了相应 的分析 和设 计方 法 。 1 问题 描 述
N C S 的模型是分析和设计系统 的基础。 在N C S 中, 首先系 统的模型与被控对 象以及网络延时特性有关。 一般情况系N C S 结构如图1 所示。 其延时一般包括3 个部分: 表示传感器到 控制器的延时,r 表示控制器到执行器的延时,『 [ 表示控制 器 中的计 算 延时 。 现 在 的高性 能 处理 器 的处 理 时 间 比r 、
单包传输。( 5 ) 不考虑噪声干扰问题。 建 立符 合 网络特 性 的控制 系统 模 型是 对其进 行分析和 设 2 . 1 短时延的网络控制系统建模 计 的基 础, 但 是 传统 的控 制理 论给 出的系统模 型难 以应用到 网 短时延是指网络延时小于一个采样周期 , 即: ( 络 控 制系 统 中。 为此 , 本文针对 网络 控 制系 统 的出现 的不确 定 为采 样周 期 ) , 短时延 网络 控制信 号时序 如 图2 所示, 基于前面 短延时、 长时延和丢包建模 问题进行了总结性分析, 同时进一
基于网络的量化反馈控制系统综述

Abstract
Firstly, the development of network control theory and quantitative control theory were briefly reviewed in this article. Network control was combined with quantitative control whose structures and characteristics were analyzed and studied. The development status and research achievements of stability analysis, quantizer design, controller design, robustness analysis and so on based on the quantization feedback control system considering the delay, pack loss, quantization, network bandwidth and other factors were focused on and reviewed. Finally, the research status of network quantization control system was given some more all-sided description; at the same time, some problems to be solved were presented which give the guidance meaning for the further research work in the future.
计算机控制系统

学院:电气信息工程学院专业:电气工程及其制动化班级:09-1班姓名:张景辉学号:540901020155计算机控制系统综述摘要:目前工业计算机控制系统按结构层次基本上划分为:直接数字控制(DDC)系统、监督控制(SCC)系统、集散型控制系统(DCS)、递阶控制系统(HCS)和现场总线控制系统(FCS)等几种。
工业计算机控制系统是为了提高产品质量、降低成本、减少环境污染。
因此,计算机控制系统已成为生产设备及过程控制等重要的组成部分。
关键字:DDC、SCC、DCS、HCS、FCS一、直接数字控制(DDC)系统DDC系统是利用微信号处理器来做执行各种逻辑控制功能,它主要采用电子驱动,但也可用传感器连接气动机构。
DDC系统的最大特点就是从参数的采集、传输到控制等各个环节均采用数字控制功能来实现。
同时一个数字控制器可实现多个常规仪表控制器的功能,可有多个不同对象的控制环路。
目前DDC控制系统常采用的网络结构有两种,即Bus总线结构和环流网络结构。
其中Bus总线结构是所有DDC 控制器均通过一条Bus总线与集中控制电脑相连,它的最大优点就是系统简单、通信速度较快,对一些中、小型工程较为适用;但在大型工程时就会导致布线复杂。
为此目前有些公司又推出了支路Bus总线结构网络,它是通过一个通讯处理设备(NCU)后产生支路Bus总线,这样各支路又可带数个现场DDC控制器,对一个大区域而言,只需几个NCU与系统Bus总线相联即可。
这样可大大简化该系统。
对于环流网络结构,它是利用两根总线形成一个环路,每一个环路可带数个DDC控制器,多个环路之间通过环路接口相联,因此这种系统最大优点就是扩充能力较强。
通讯网络是用于完成集中控制电脑与现场DDC控制器以及现场设备之间的信息交换。
其联接材料通常采用截面积为1.0mm2的RVVP聚氯乙烯绝缘、聚氯乙烯护套、铜芯电缆或采用专用通信电缆。
现场DDC控制器与现场设备(如传感器、阀门等)之间的控制电缆一般采用1~1.5mm2聚氯乙烯绝缘、聚氯乙烯护套、铜芯电缆,是否需要采用屏蔽线应根据具体设备而定。
网络控制系统的建模方法综述

,
,
象为非线性系统时,采用这种建模方法进行分析和设计仍 比较困难。
13 网络控 制系统综合模型研究 . 在 网络控制系统中,假设被控对象是时滞不确定系统 , 可描述为 : A十 AA ( ( + A.△A '( + )( +B ABu0
沪 力 其 中 xt ( R ,分别是适 当维数 的状态矢量 和控 制矢 ( R ,ut m ) )
。
科技与生适
20第2 0年 2 1 期
应 用 科 学
1 0 7
网络控制 系统 的建模 方法综述
杜 静 ,李月英 ,周庆华
( 町南省水 利水 电学校 ,河南 周 口 4 6 0 1 6 00;2郑州科技学院 ,河南郑} 4 0 6 ;3中海发展股份有 限公 司,广乐r州 50 2 . H504 . 12
控制器接收到的最新被控对象的输出。令
பைடு நூலகம்
其 中h 为采 样周 期 ,i k 1 ( = ,2,3 )是 一 些 整 数 且 { , … i
( l ( , ( (一 “), 沪 fT 垆 f 0 e ,[ ( ( f )y f ) r ] ( ) 】
系统 的动力学模型可以表示为 :
摘 要 综 合多篇文献 资料给出网络控制 系统的参考定义 ,通过对各类 系统的数学模 型的分析和研究 ,指 出各种 系统数学 模型的优缺点 ,
并给 出最新 的研究成果 ,指 出网络控制系统 的发展方向 。
关键 词 网络控制系统 ;模 型 中图 分类 号 T 文 献标 识码 A P 文章 编号 17—6 1( 1)1— 17 叭 63 97一2 o120 0一 0
} f ,1 , …} ,表示 系统 并没 有发生 数据 包丢 失 ; } =0 ,2 时 n f 1 > 时,则表示有数据包丢失 。 上述方法将网络控制系统建模成具有随机延时的时滞系统 ,并 日 同 时考虑了数据包 丢失的情况,是 比较广义的建模方法 。可见 ,时滞系统 模型 比较全面地考虑了网络控制系统 的各种情况 ,建立的模型 也比较符 合实际 ,但分析具有随机 时滞的时滞系统的有关理论还不 卜 分成熟 ,目 前 比较常见的方法是采取线性矩阵不等式 ( MI L )的方法。当被控制 列
网络控制系统发展趋势综述
突 破集 中控制 模 式 的束 缚 ,系 统可靠 性 有 限 。
现场 总线技术 ( C )兴起于2 世纪9 年代 ,其 FS 0 0
适 应 了各行 业 现 场 测 控方 面 的 需 求 ,形 成 了多标 准 并 存 的局 面 。F S 以现 场 总 线 作 为 底 层 网络 ,通 过 网 C是 络 集 成 构 成 的 自动 控 制 系 统 。 它 突 破 了D S 统 中采 C系 用专 用 网络 的缺 陷 ,把 专 用封 闭协 议 变 成标 准 开 放 协 议 ,将 现 场 的 各种 控 制 器 和 仪表 设备 相 互 连接 ,把 控
了三 次 比较 大 的变 革 ,7 年代 无 动 态 流 程 图 、操 作 站 0 是 专用 的 ,通信 网络 采 用 轮询 方 式 。8 年 代通 信 网 络 0
制 系 统和 计 算 机 集 中式 控 制 系 统 的优 点 ,体 现 了 管理 的 集 中性 和 控 制 的分 散 性 。 虽然 与D S 比 ,D S 有 D相 C具
系统扩展和维护 以及能够实现信息资源共享 。随着 自
动控 制 、计 算机 、通 信 、 网络 等 技 术 的 发展 ,企 业 的
信息系统也在不断 的更新发展 ,因此网络控制系统须 满足复杂控制系统和远程控制系统 的客观要求 。
一
由于控制系统的开放性差等原因使得工业以太 网
技 术迅 猛 发 展 。 由于 以太 网具 有广 泛 的技 术 支持 ,传
制单元作为 网络系统连接起来共同完成控制任务的系
统 。网络 控 制 系 统 充分 体 现 了 控制 系 统 向网络 化 、 集
成化、分布化 、节点智能化方 向的发展趋势,在工业
时延网络控制系统的研究综述
《 业 控 制计 算 机} 0 7年 2 工 20 O卷 第 5期
时延网络控制 系统的研究综述
S r e n e e r h o me De a t r n r S se u v y o R s a c fTi ly Ne wo k Co t ol y t m
商 丽娜 张 荣 标 ( 江苏大学电气信息工程学院, 江苏 镇 江 2 2 1 ) 10 3
摘 要
系统 介 绍 了时 延 网络 控 制 系统 的 研 究现 状 , 包括 时延 网络 控 制 系统 的基 本 分 析 和 控 制 系统 的 建 模 , 描 述 了 目前 针 对 并 时延 网络 控 制 系统 的控 制补 偿 策略 。在 此 基 础 上 分 析 了 时延 网络 控 制 系统 尚 待 解 决 的 问题 和 一 些新 的研 究方 向。
近 年 来 随 着 现场 总 线 控 制 技 术 、 工业 以 太 网 技 术 的 成 熟 应 用 和性 能 造 价 比的 不 断 提 高 , 网络 控 制 系 统 ( ewok d Co — N t re n t l y tms N S) r se , C 以其 资 源 共 享 、 统 分 布 控 制 、 件 连 线 较 o S 系 硬
关键词 : 网络 控 制 系统 , 时延 , 偿 , 糊 控 制 补 模
Ab ta t sr c T e ea c t aies ftme he r s r h ac u li o i dea n t k o tol y tm i itodu ed y t m a i l i lde h ba i an lss n t ly ewor c n r s se s nr c s se t l ncu s t e ca y, sc ay i o
网络控制系统的状态估计研究综述
估 计 ,进 而利 用 估 计 值 得 到控 制 器 设 计 。 由此 可 以看 出 ,
问 题 的 关键 所 在 是 得 到 状态 的估 计 值 ,所 以在 本论 文 中将
文献 【 7 ] 利 用概 率 的方 法设 计 了带有 时滞 的网络 控 制 系统 的
Ka l ma n滤波 。文献 [ 8 ] 分 别提 出了具 有随 机观测 时滞 的递 推 最 小方 差状 态估计 问题 。近年来 ,针 对具有 观 测时 滞 的系统 估 计问题 ,文献 [ 9 ]提 出新 息重 组 分析 法来 处 理 时滞 ,将 观 测数 据 重新组 合从 而设 计估 计器 。文献 [ 1 0 ] 针 对测 量通 道是
滞 概率 已知 的条件下设 计得 到 了次 优滤波 器 。 关 于数 据包 丢失 时的状 态估 计问题 的研 究也 已取 得大 量 研 究成 果 。文献 [ 1 2 ] 利 用Be r n o u l l i 统 计特 性来 描述丢 包过 程
从B e r n o u l l i 分 布 的变 量描 述 在 网络 传 输 中 同时 发 生 时滞 和 丢 包 的测 量 ,从 而 得 到 观测 器 设 计 ,并 在 此基 础 上 设 计 了
基 于 观 测 器 的H。 。 控 制 问 题 归 类 于 估 计 问 题 中 。C . L i n ,
z . D. Wa n g 等 针对 随机 测 量 时滞 的 连续 时 间 系统 提 } f j 了 基 于 观 测 器 的 Ho 。控 制 问 题 ,通 过线 性 矩 阵不 等式 给 控 制 器 形 式 ,并 且 保 证 系统 是 指 数 均 方 稳 定 的 。对 于 随 机 丢 包 的 网络 系 统 ,J . G. L i ,J . O. Y u a n ,J . G. Lu 等利 用 已知概 率 分 布 的Be r n o u l l i随机 变 量来 描 述 随 机丢 包 序列 ,给 基于 观 测 器 的反 馈 控 制 器存 在 的充 分 条件 。F . W. Ya n g 等 已经 利 用 服
网络化控制系统的几个主要问题及其分析
而被要求重发,如果该节点的数据在规定的 现场控制的网络控制系统来说造价太高, 点配置。
重发时间内仍然没有成功发送数据,则该数 包括OSI系统所有各层的总开销,对于网络
采用上述几个基本的降低网络负载的
据包被丢弃。这些现象都可视为数据包丢 控制系统的应用来说同样显得太高。
方法,将有利于控制系统的实时性要求,提
产生影响。这就需要通过调度来协调控制 (Message Collision)、信息吞吐量、分组尺寸
(作者单位 辽宁省沈阳职业技
网络。调度分为静态和动态调度。静态调度 (Packet Size)、网络利用率和一些确定界等。 术学院机械装备系学办)
新课程学习 159
过程中,传感器—控制器和控制器—执行器 的基本问题外,控制系统部件的工作模式, 而只有三层。这样既减少了无效数据的传
的时延,记为τsc和τca,合称为网络诱导时 时钟同步等问题始终贯穿于网络控制系统 输,也减少了编码解码的时间,从而提高了
延。而在大多数情况下,网络诱导时延是时 的分析、设计以及实现过程中,有时也会影 实时性。
失。闭环控制系统虽然对系统中结构和参数
4.控制网络通常可以选择低成本的桥 高NCS的控制性能。
的变化具有一定的鲁棒性,但不可避免地造 接器、路由选择器等实现和其它开放式网
参考文献:
成性能的下降,严重地将导致系统失稳,需 络系统的连接,这一点非常重要。
[1]邢江,关治洪.网络化控制系统的研
要寻找行之有效的解决方法。
关键词:网络化控制;网络延迟;通信约束;数据包丢失;信息调度
一、网络化控制系统研究目前存在的 指在系统运行前就规定了传输顺序,其传 对于控制系统,理想的控制网络至少必须满
主要问题
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 引言
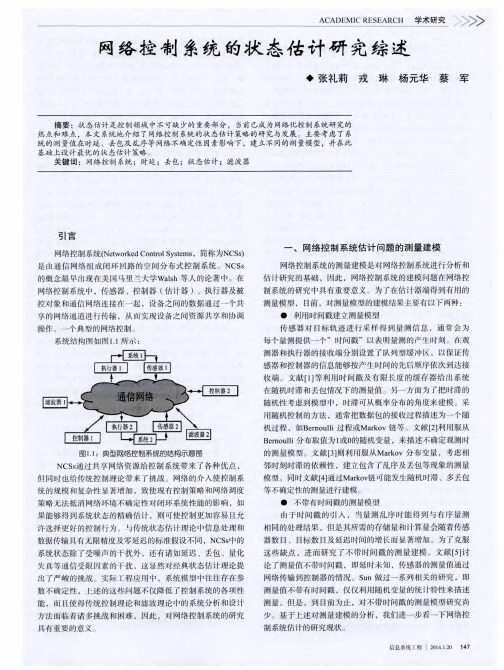
网络控制系统( t r e o to S s msNC ) Newok d C nr l yt , S , e 又称为 网络化 的控制 系统 ,是一种全分布 、 网络化 实时 反馈控制系统 。它 是指某区域现场传感器 、控 制器 及执 行器和通信网络的集合 , 以提供设备之 间的数据传 输 , 用 使该 区域 内不 同地 点 的用户实 现资源共 享和协 调操作 。 它是上世纪 9 0年代初提出的概念 , 是计算机技术 、通信
2 计 算 机 控 制 系统 的 发 展 历 程
2 0世纪 中期的 自动控制生产规模很小 , 数字计算机
支结构的通信网络 。它突破了 D C S系统 中采用专用 网络 的缺 陷 , 把专 用封闭协议 变成标 准开放协议 。 同时它使 系统具有 完全数字计算和 数字通信能力 。结构上 它采用 了全分布式方 案 , 把控制功能彻底 下放 到现场 , 提高了系
A e fh t re nrl y t ms Suv yo eNewo k dCo t se r t oS
XU n - i XU a g y n Fe g q n, Xi n - ua
(ini oyeh i Unvri o ue eh oo ya dAuo tdIs tt,i jn3 0 6 ,hn ) TБайду номын сангаасj P ltc nc i esyC p tr c n lg n tma tue a i 0 1 0C ia n t T e n i Tn
一
3 2 网络 时延 .
网络控 制 中的时 延 ,主要来源 于数据在 网络 上的传 输时延和控制器的运算时延(r , ) 这些时延的位置分布 如图 2所示『l 7。数据在 网络上 的传输 时延由传感器 到控 制器 时延( ) r 以及控制器到执行器时延(r ) 两段构成, 他们具有相 似的特点 , 通常都是时变的 , 控制器执行运算 产生 的时延 r 通 常也 是时变的 。但依据不 同的 网络结 构与协议又 可以分 为周期性 、确定性 时延 以及 随机性 时 延两种情 况。针对 不 同的时 延 , 多人提 出了不同的处 很
Ab ta t Th satcer ve sted v l p n it r ft eNCS, d ito u e t u rn e e r h sau e . s do x si g sr c : i ril e iw e eo me th so y o h h n a n r d c si c re trs a c tts s Bae n e itn s p o lm s t ef t r e eo me t fNCS a eo t n d. r b e ,h u u ed v lp nso r ul e i Ke wO dsn t r e o to y tms n t r ea ; f r ai ni tg a in;tblt y r : ewo k dc nr l se ; e wo kd lyi o m to n e r t s n o sa i y i
收稿 日期: o 一 6 27 2 6 o - o
维普资讯
现场 总线 与 网络
Fi d Bu d Ne wo k el s an t r s
《 自动化 技术与应用 》2 0 年第 2 卷第 3 07 6 期
统可靠性和灵活性 。但是 FCS 系统 的各 种协议并不统
摘 要 : 文回顾 了网络控制系统的发展历 史 , 本 介绍 了网络控制系统 的研 究现状 , 指出网络控制系统存 在的 问题 的 在 基 础上 ,提 出了未来 网络控制 系统的 发展方 向。 关键词 : 网络控制 系统 ; 网络时延 ; 息集成 ; 信 稳定性 中图分类号 : P 9 T 33 文献标识码 : A 文章编号:0 3 7 4 (0 70 — 0 0 0 l0 — 2 1 0 )3 0 3 — 5 2
技 术 与 控 制 技 术 发展 与 融合 的 产 物 。 网 络 控 制 系 统 充 分
技术 尚不 发达 , 计算机价格 昂贵 , 人们企 图用一 台计算机 取 代尽可 能多的控制 室仪表 , 于是 出现 了集 中式数字控 制系统 ( DDS) 。由于 当时计算机 可靠性较差 , 一旦计算
机 出现某种故 障 , 会造成所 有相关控 制 回路瘫 痪 、生 就
产 停产 的严 重局面 。 2 0世纪 8 0年代中期 , 随着 计算机可靠性的提高 , 价 格 的大幅度 下降 ,出现 了数字调 节器 、可编程控 制器 以 及 由多个计算机递 阶结 构的集 中与分散相 结合的集散控 制系统( S , DC ) 它在功能、性能上较 D DS系统有 了很大进 步, 但是 DCS系统仍然是模拟数字混合系统 , 模拟信号的 转换 和传输使 系统精度 受到 限制 。其次 ,它结构上遵 循 主从式思想 , 没有完全突破集 中控制模式的束缚 , 系统可 靠性有限。而且 D CS系统属非开放式专用网络 , 各系统 互不 兼容 , 不利于系 统的普及与应 用。
体现了控制系统 向网化 、集成化 、分 布化 、节点智 能化 的方 向发展 ,在工业 自动化 等方 面 已产 生 了深 远影 响。
它 的典 型 结 构如 图 lI 示 : 【】 所
图 1 典型 网络控 制系统设 置与信息流 向
现场总线技术 ( CS F )兴起于 2 0世纪 9 0年代, 是连 接智能 现场设备和 自动化 系统的数字 式双 向传输 、多分
维普资讯
《 动 术 应 》 07 第2卷 期 自 化技 与 用 20 年 6 第3
现 场 总 线 与 网络
F e d BU n t r s i l S a d Ne wo k
网络 控 制 系统 综 述
徐 丰 芹 ,徐 湘 元
( 天津工业大学 自动化系, 天津 3 0 6 ) 0 l 0