阵列信号处理课件西电
如对您有帮助,请购买打赏,谢谢您!
信号子空间:
设N 元阵接收p 个信源,则其信号模型为:()()()()1
p
i
i
i
i x t s t a N t θ==+∑
在无噪声条件下,()()()()()12,,,P x t span a a a θθθ∈
称()()()()12,,
,P span a a a θθθ为信号子空间,是N 维线性空间中的P 维子空间,记为
P N
S 。 P
N S 的正交补空间称为噪声子空间,记为N P N N -。 正交投影
设子空间m S R ∈,如果线性变换P 满足, 则称线性变换P 为正交投影。 导向矢量、阵列流形
设N 元阵接收p 个信源,则其信号模型为:()()()()1
p
i
i
i
i x t s t a N t θ==
+∑,
其中矢量()i i
a θ称为导向矢量,当改变空间角θ,使其在空间扫描,所形成的矩阵称为阵列流形,用符号A 表示,即(){|(0,2)}a A θθπ=∈
波束形成
波束形成(空域滤波)技术与时间滤波相类似,是对采样数据作加权求和,以增强特定方向信号的功率,即()()()()H
H
y t W X t s t W a θ==,通过加权系数W
实现对θ的
选择。 最大似然
已知一组服从某概率模型()
f X θ的样本集12,,,N X X X ,其中θ为参数集合,使条件概
率()12,,
,N f X X X θ最大的参数θ估计称为最大似然估计。
不同几何形态的阵列的阵列流形矢量计算问题
假设有P 个信源,N 元阵列,则先建立阵列的几何模型求第i 个信源的导向矢量()i i a θ 选择阵元中的一个作为第一阵元,其导向矢量()1[1]i a θ=
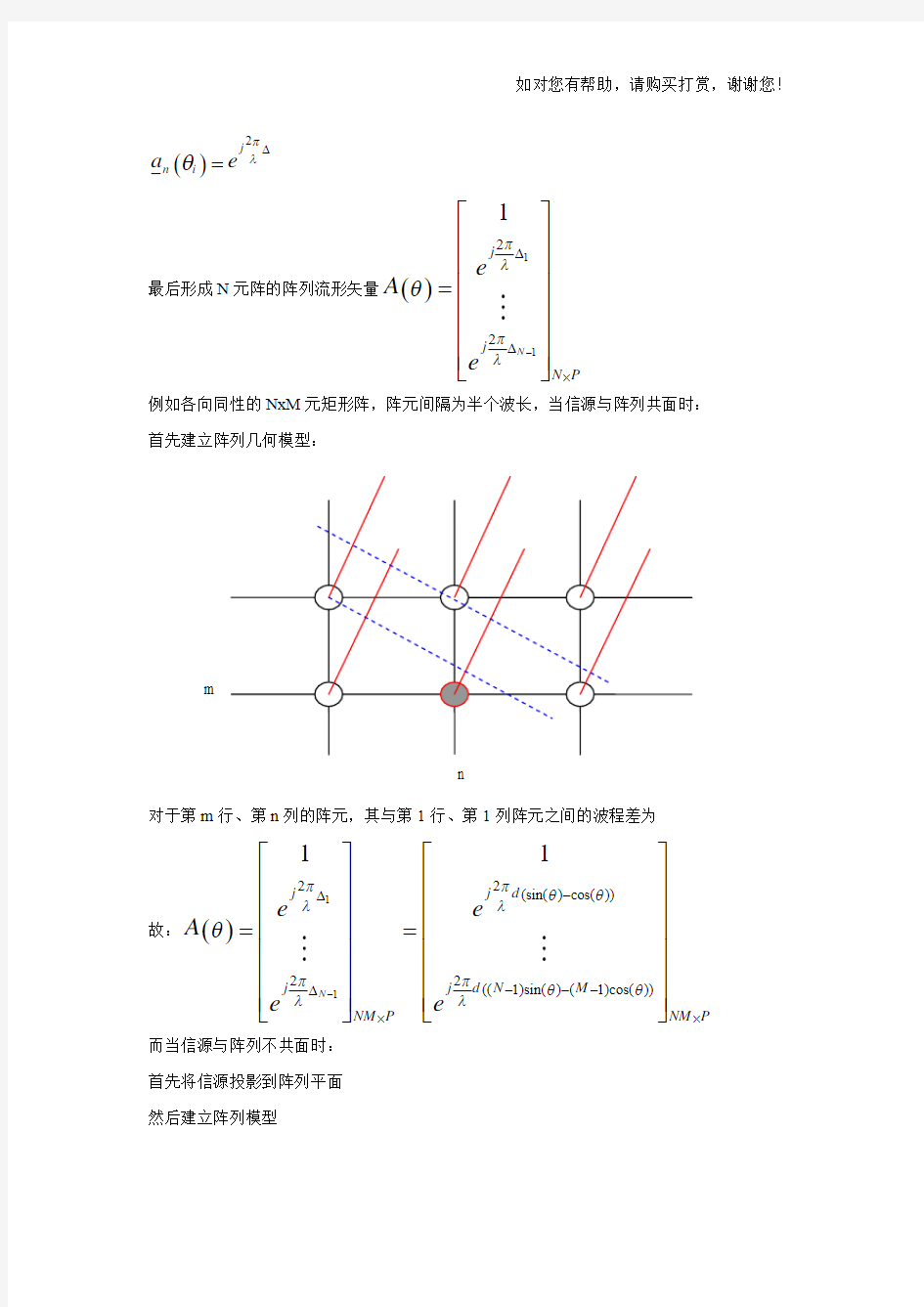
然后根据阵列的几何模型求得其他各阵元与第一阵元之间的波程差n ?,则确定其导向矢量
数字信号处理西电
数字信号处理上机第一次实验 实验一: 设给定模拟信号()1000t a x t e -=,的单位是ms 。 (1) 利用MATLAB 绘制出其时域波形和频谱图(傅里叶变换),估计其等效带宽(忽略谱分 量降低到峰值的3%以下的频谱)。 (2) 用两个不同的采样频率对给定的进行采样。 ○1 。 ○2 。 比较两种采样率下的信号频谱,并解释。 实验一MATLAB 程序: (1) ○ 1 clc; fs=5000; ts=1/fs; N=1000; t=(-N:N)*ts; s=exp(-abs(t)); plot(t,s,'linewidth',1.5) xlabel('时间') ylabel('幅度') set(gca,'fontweight','b','fontsize',12) SPL=N*100; figure sp=fftshift(fft(s,SPL)); sp=sp/max(sp)*100; freqb=-fs/2:fs/SPL:fs/2-fs/SPL; plot(freqb,abs(sp)) xlabel('频率') ylabel('频谱幅度') set(gca,'fontweight','b','fontsize',12) yy=abs(abs(sp)-3); [aa,freqind]=min(yy); (freqind-SPL/2)*fs/SPL t ()a x t ()()15000s a f x t x n =以样本秒采样得到。()() 11j x n X e ω画出及其频谱()()11000s a f x t x n =以样本得到。()()11j x n X e ω画出及其频谱
多通道实时阵列信号处理系统的设计
多通道实时阵列信号处理系统的设计 由judyzhong于星期三, 11/11/2015 - 14:06 发表 作者:杨欣然,吴琼之,范秋香来源:电子科技 摘要:以全数字化信号产生和数字波束形成处理为基础的数字化阵列雷达已成为当代相控阵雷达技术发展的一个重要趋势,本文针对现代数字化阵列雷达对多通道数据采集和实时处理的需求,设计了一种基于FPGA的多通道实时阵列信号处理系统。可完成对20通道的中频数据采集,实时波束合成和数据传输功能,实验结果表明系统工作稳定、性能良好,具有良好的信噪比和通道一致性。 随着数字信号处理技术的不断进步和相应处理能力的不断提高,数字化阵列雷达以其动态范围大、扫描波束多、设计灵活性高的特点,已经逐步取代传统模拟阵列雷达成为高性能阵列雷达的主要研究方向。数字化阵列雷达需要将各个阵列天线接收的信号经过模拟下变频后经过AD采样并在数字域内进行信号处理,其典型的信号处理的方法包括数字波束形成(DBF)技术和波达方向估计(DOA)技术等。对于数字阵列雷达而言,对模拟下变频后的信号完成多
通道数据采集、数据处理和传输是系统的关键部分,对处理系统的同步性能、通道间幅相一致性均提出了很高要求,如进行DBF处理中通道间的不一致性将会影响波束合成后天线的方向图的特性,使增益下降、旁瓣电平升高。同时数字阵列雷达需要对各个通道采集下的数据实时地完成信号处理和数据传输功能,对处理系统的实时处理能力和信号吞吐能力提出了一定挑战。 本文介绍了一种针对DBF处理的多通道阵列信号处理系统的设计方案,以Xilinx的 XC7K325T FPGA为核心,完成了20通道的中频数据采集,并在FPGA内完成数字波束合成功能,可以同时完成8个波束指向的合成,并且将合成后的数据通过RapidIO结果传输至实时处理机进行进一步的处理。 1 系统设计原理和组成 本系统由数据采集模块和波束合成与传输模块两部分组成,系统框图如图1所示。 20路模拟中频输入通过SSMC连接器输入,由5片四通道A/D芯片AD9653采样后,通过LVDS接口串行输出到到FPGA的ISERDES输入模块中完成串并转换,并在FPGA内完
西工大《阵列信号处理》考点整理
西工大《阵列信号处理》复习考点整理 考试形式: 一、8道问答题,每道题5分; 二、六道大题,包括PPT 上老师给出的那一道。 一 1. 均匀线列阵在波束扫描时,波束图怎么变化? 当波束指向法线方向时,波束图具有最窄的主瓣宽度;随着阵元指向逐渐远离法线方向,主瓣一直指向所调方向并且展宽;除了指向法线方向外,主瓣都关于波束倾角轴不对称;当达到某一临界角时不能形成波束,但是在端射方向又可以形成波束。且在端射方向形成一个较宽的主瓣。 2.DI 是什么? DI 表示指向性指数,其表达式为 D 为方向性,是阵列和孔径的一个常用性能度量。 ???=ππ φθθφθπφθ200 ),(sin 41) ,(P d d P D T T 3. DC 加权的特点 (1)旁瓣级给定时,主瓣宽度最小; (2)主瓣宽度给定时,旁瓣级最低; (3)等旁瓣级。 4. 频域快拍模型是什么,步骤是什么,常用的频域快拍取的时间有什么关系? (1)记住《最优阵列处理技术》245页图 5.1 (2)步骤: ①把总的观测时间T 分为K 个不重叠的时间区域,区域长度为△T ; ②对时域快拍进行FT ; ③对频域向量(频域快拍)进行窄带波束形成; ④对上述频域信号进行IFT 。 (3)△T 的选择准则 ①△T 必须远大于平面波通过阵列的传播时间; ②△T 依赖于输入信号的带宽和信号的时域谱,16≥??T B (B*△T 足够大,选用频域快拍模型)。 5. 什么是均匀阵的瑞利限? 常规波束形成分辨率的极限。表达式为 6. 空间白噪声的阵增益的相关计算。 阵列增益ωA 的定义为阵列的输出SNR 和一个阵元上的输入SNR 的比值。下标“ω”表示空域不相关的噪声输入。表达式如下:
西电数字信号处理上机实验报告
数字信号处理上机实验报告 14020710021 张吉凯 第一次上机 实验一: 设给定模拟信号()1000t a x t e -=,t 的单位是ms 。 (1) 利用MATLAB 绘制出其时域波形和频谱图(傅里叶变换),估计其等效带宽(忽略谱分量降低到峰值的3%以下的频谱)。 (2) 用两个不同的采样频率对给定的()a x t 进行采样。 ○1()()15000s a f x t x n =以样本秒采样得到。 ()()11j x n X e ω画出及其频谱。 ○2()()11000s a f x t x n =以样本秒采样得到。 ()() 11j x n X e ω画出及其频谱。 比较两种采样率下的信号频谱,并解释。 (1)MATLAB 程序: N=10; Fs=5; T s=1/Fs; n=[-N:T s:N]; xn=exp(-abs(n)); w=-4*pi:0.01:4*pi; X=xn*exp(-j*(n'*w)); subplot(211) plot(n,xn); title('x_a(t)时域波形'); xlabel('t/ms');ylabel('x_a(t)'); axis([-10, 10, 0, 1]); subplot(212); plot(w/pi,abs(X)); title('x_a(t)频谱图'); xlabel('\omega/\pi');ylabel('X_a(e^(j\omega))');
ind = find(X >=0.03*max(X))*0.01; eband = (max(ind) -min(ind)); fprintf('等效带宽为%fKHZ\n',eband); 运行结果: 等效带宽为12.110000KHZ
2017年西电电院数字信号处理教学大纲
《数字信号处理》课程教学大纲 课程代码:IB3123008 课程名称:数字信号处理英文名称:Digital Signal Processing 开课学期:第6学期 学分:3 学时:48 课程类別:必修课,专业基础课 适用专业:电子信息工程、信息对抗技术、遥感科学与技术、电磁场与无线技术、智能科学与技术 开课对象:三年级本科生 先修课程:信号与系统、MATLAB语言 后修课程:雷达原理、数字图像处理、数字音视频处理等 开课单位:电子工程学院 团队负责人:史林责任教授:史林 执笔人:史林核准院长:苏涛 一、课程性质、目的和任务 数字信号处理采用数字技术,研究信号和系统分析、处理、设计的基本原理和方法,是电子信息与电气工程类专业(电子信息工程专业、通信工程专业、信息工程专业等)的专业基础课,具有理论与实践紧密结合的特点。 通过本课程的学习,使学生建立数字信号处理的基本概念,掌握数字信号处理的基本原理、理论和方法,了解数字信号处理的新方法和新技术,熟练应用现代工具进行数字信号处理的仿真、分析和设计,达到能够对数字信号和系统进行分析、处理和设计的能力水平。为学习后续专业课程、进行创新性研究和解决复杂工程问题,奠定坚实的专业基础理论知识和工程实践能力。 本课程对学生达到如下毕业要求有贡献
二、教学内容、基本要求及学时分配 《数字信号处理》课程的教学内容、基本要求、学时分配和毕业要求指标点在教学中的具体体现如下。 (一)绪论 ( 2学时) 1.教学内容 介绍数字信号处理的基本概念、研究的内容及应用领域、发展概况和发展趋势,数字信号处理的基本特点,用数字方法处理信号的基本概念和一般方法。 2.基本要求 (1)了解数字信号处理研究的内容、应用领域、发展概况和发展趋势; (2)熟悉数字信号处理的基本概念和特点; (3)掌握用数字方法处理信号的基本概念和一般方法。 3.重点、难点 重点:数字信号处理的基本概念和特点。 难点:用数字方法处理信号的基本概念和一般方法 4.作业及课外学习要求 作业:分析数字信号处理的特点;熟悉用数字方法处理信号的一般方法,理解其中每个模块单元的作用。 课外学习:学习或复习MATLAB语言,掌握编程方法和技巧,做好后续的上机实验准备。 5.对毕业要求指标点的具体贡献 对指标点2-1的具体贡献:理解复杂工程问题中的数字系统; (二)离散时间信号和系统的时域分析( 4学时+4学时上机) 1.教学内容
阵列信号处理知识点
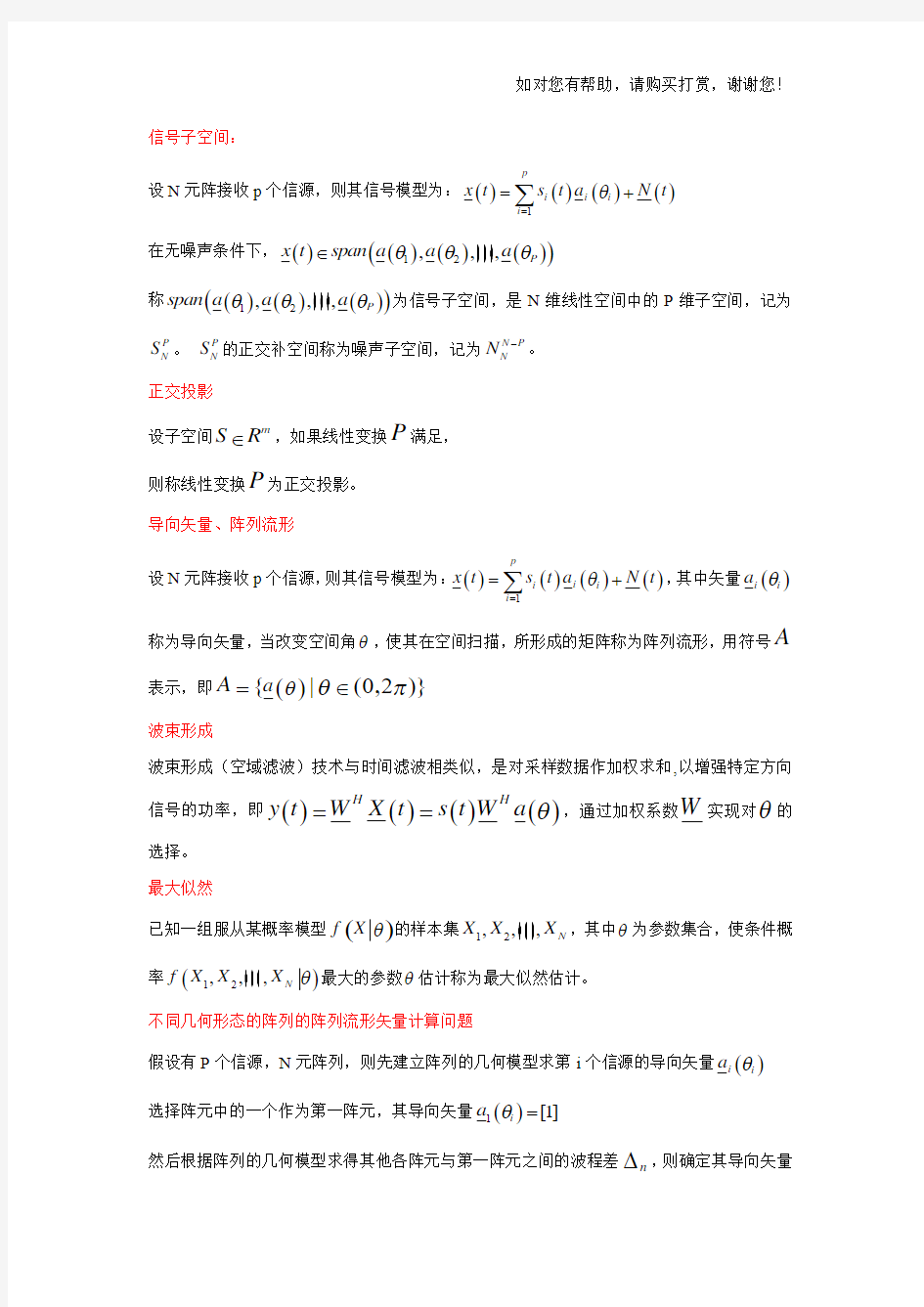
信号子空间: 设N 元阵接收p 个信源,则其信号模型为:()()()()1 p i i i i x t s t a N t θ== +∑ 在无噪声条件下,()()()()()12,, ,P x t span a a a θθθ∈ 称()()()()12 ,, ,P span a a a θθθ为信号子空间,是N 维线性空间中的P 维子空间,记为P N S 。P N S 的正交补空间称为噪声子空间,记为N P N N -。 正交投影 设子空间m S R ∈,如果线性变换P 满足, 则称线性变换 P 为正交投影。 导向矢量、阵列流形 设N 元阵接收p 个信源,则其信号模型为:()()()()1 p i i i i x t s t a N t θ== +∑,其中矢量()i i a θ称为 导向矢量,当改变空间角θ,使其在空间扫描,所形成的矩阵称为阵列流形,用符号 A 表示,即 (){|(0,2)}a A θθπ=∈ 波束形成 波束形成(空域滤波)技术与时间滤波相类似,是对采样数据作加权求和,以增强特定方向信号的功率,即 ()()()()H H y t W X t s t W a θ==,通过加权系数W 实现对θ的选择。 最大似然 已知一组服从某概率模型 ()f X θ的样本集12,, ,N X X X ,其中θ为参数集合,使条件概率 ()12,,,N f X X X θ最大的参数θ估计称为最大似然估计。 不同几何形态的阵列的阵列流形矢量计算问题 假设有P 个信源,N 元阵列,则先建立阵列的几何模型求第i 个信源的导向矢量()i i a θ 选择阵元中的一个作为第一阵元,其导向矢量()1 [1]i a θ= 然后根据阵列的几何模型求得其他各阵元与第一阵元之间的波程差 n ?,则确定其导向矢量 ()2j n i a e πλ θ? =
阵列信号处理方面10个经典程序
1.均匀线阵方向图 %8阵元均匀线阵方向图,来波方向为0度 clc; clear all; close all; imag=sqrt(-1); element_num=8;%阵元数为8 d_lamda=1/2;%阵元间距d与波长lamda的关系 theta=linspace(-pi/2,pi/2,200); theta0=0;%来波方向 w=exp(imag*2*pi*d_lamda*sin(theta0)*[0:element_num-1]'); for j=1:length(theta) a=exp(imag*2*pi*d_lamda*sin(theta(j))*[0:element_num-1]'); p(j)=w'*a; end figure; plot(theta,abs(p)),grid on xlabel('theta/radian') ylabel('amplitude') title('8阵元均匀线阵方向图') 当来波方向为45度时,仿真图如下:
8阵元均匀线阵方向图如下,来波方向为0度,20log(dB)
随着阵元数的增加,波束宽度变窄,分辨力提高:仿真图如下:
2.波束宽度与波达方向及阵元数的关系 clc clear all close all ima=sqrt(-1); element_num1=16; %阵元数 element_num2=128; element_num3=1024; lamda=0.03; %波长为0.03米 d=1/2*lamda; %阵元间距与波长的关系 theta=0:0.5:90; for j=1:length(theta); fai(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num1*d)); psi(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num2*d)); beta(j)=theta(j)*pi/180-asin(sin(theta(j)*pi/180)-lamda/(element_num3*d)); end figure; plot(theta,fai,'r',theta,psi,'b',theta,beta,'g'),grid on xlabel('theta'); ylabel('Width in radians') title('波束宽度与波达方向及阵元数的关系') 仿真图如下:
阵列信号处理
宽带信号中的三种二维平面阵DOA估计
宽带信号中的三种二维平面阵DOA 估计 一. 背景 目前关于阵列窄带信号的高分辨算法已比较成熟,但是随着信号处理技术的发展,信号环境日趋复杂,信号形式多样,信号密度日渐增大,窄带阵列探测系统的确定逐渐显示出来。 由于宽带信号具有目标回波携带的信息量大,有利于目标探测、参量估计和目标特征提取等特点,在有源探测系统中越来越多地得到应用。而在无源探测系统中,利用目标辐射的宽带连续谱进行目标检测是有效发现目标的一种重要手段。 ISM 方法把宽带信号在频域分解为J 个窄带分量,然后在每一个子带上直接进行窄带处理。因为信号为调频信号,所以信号在时域的分段实际上就是频域的分段。将信号分解为窄带信号后,我们就可以利用窄带算法进行处理,最后将各个结果进行加权综合,即可得到最终的结果。 二维DOA 估计是阵列信号处理中的重要内容,通过二维DOA 估计可以得到信号源在平面中的角度信息。一般采用L 型、面阵和平行阵或矢量传感器实现二维参数的估计,多数有效的二维DOA 估计算法是在一维DOA 估计的基础上,直接针对空间二维谱提出的,如二维MUSIC 算法以及二维CAPON 算法等。这两种算法可以产生渐进无偏估计,但要在二维参数空间搜索谱峰,计算量相当大。而采用二维ROOT MUSIC 算法可以减小计算量,但是需要付出精度下降的代价。 本次报告将结合宽带信号和二维DOA 估计算法,进行相关的算法介绍和仿真。 二. 算法介绍 1. 接收信号模型: 图 1 平面阵列示意图 如图1所示,设平面阵元数为M ×N ,信源数为K 。信源的波达方向为11(,),,(,)k k θφθφ , 第i 个阵元与参考阵元之间的波程差为: 2(cos sin sin sin cos )/i i i x y z βπφθφθθλ=++ 设子阵1沿x 轴的方向矩阵为x A ,而子阵2的每个阵元相对于参考阵元的波程差就等于子阵1的阵元的波程差加上2sin sin /d πφθλ,所以接收信号为
2017年西电电院数字信号处理上机实验报告三
实验三、信号的频域与Z域分析 班级:学号:姓名:成绩: 1实验目的 (1)理解序列离散傅里叶变换(DTFT)的定义,熟悉序列DTFT的计算及其主要性质; (2)掌握Z变换的计算和主要性质,熟悉Z变换的收敛域及其与序列特性的关系,以及Z变换与DTFT的关系; (3)掌握时域离散线性时不变系统的频域分析方法,深刻理解系统的频率响应。了解系统的稳态响应和暂态响应、相位延迟和群延迟等概念; (4)掌握时域离散线性时不变系统的z域分析方法,深刻理解离散系统的系统函数及其零极点分布,熟悉零极点分布与系统的因果性和稳定性关系、零极点分布对系统频率特性的影响、差分方程的Z变换解法等; 2 实验内容 (1)设计计算机程序,产生序列并计算序列的DTFT,绘制其幅频特性和相频特性曲线; (2)根据系统的单位脉冲响应和差分方程,计算系统的频率响应,绘制系统频率响应的幅频特性和相频特性曲线; (3)根据系统的单位脉冲响应和差分方程,计算系统的系统函数、零极点分布;改变系统的零极点分布,观察系统频率响应的变化。 3实验步骤 (1)设计有限长序列Rn;计算序列的DTFT,绘制幅频特性和相频特性曲线 (2)改变系统的系统函数的零点分布,绘制系统改变前和改变后的频率响应的幅频特性和相频特性曲线 4 程序设计 x=[1,1,1,1];nx=[0:3];%x(n)=R(n) w=linspace(-2.8*pi,2.8*pi,100000);%取100000个点
X=x*exp(-j*nx'*w);%DTFT figure(1); subplot(3,2,1),plot(w/pi,abs(X));xlabel('\omega/\pi');ylabel('|X(e^j^\omega)|') subplot(3,2,2),plot(w/pi,angle(X));xlabel('\omega/\pi');ylabel('\phi(\omega)/\pi') %差分方程求解 a=[1,-0.4];b=[1]; [H,w]=freqz(b,a,'whole'); subplot(3,2,3),plot(w/pi,abs(H));xlabel('\omega/\pi');ylabel('|X(e^j^\omega)|') subplot(3,2,4),plot(w/pi,angle(H));xlabel('\omega/\pi');ylabel('\phi(\omega)/\pi') %零极点分布 a=[1,-1.6,0.9425];%分母 b1=[1,-0.3];b2=[1,-0.8];%分子 [F,w]=freqz(b1,a,'whole'); figure(2); subplot(2,2,1),zplane(b1,a);%零极点分布图 subplot(2,2,3),plot(w/pi,abs(F));xlabel('\omega/\pi');ylabel('|X(e^j^\omega)|') subplot(2,2,4),plot(w/pi,angle(F));xlabel('\omega/\pi');ylabel('\phi(\omega)/\pi') figure(3);%改变零极点分布,观察频率响应变化 [F,w]=freqz(b2,a,'whole'); subplot(2,2,1),zplane(b2,a); subplot(2,2,3),plot(w/pi,abs(F));xlabel('\omega/\pi');ylabel('|X(e^j^\omega)|') subplot(2,2,4),plot(w/pi,angle(F));xlabel('\omega/\pi');ylabel('\phi(\omega)/\pi')
西安电子科技大学数字信号处理大作业
数字信号处理大作业 班级:021231 学号: 姓名: 指导老师:吕雁
一写出奈奎斯特采样率和和信号稀疏采样的学习报告和体会 1、采样定理 在进行A/D信号的转换过程中,当采样频率fs.max大于信号中最高频 率fmax的2倍时(fs.max>2fmax),采样之后的数字信号完整地保留了原始信号中的信息,一般实际应用中保证采样频率为信号最高频率的5~10倍;采样定 理又称奈奎斯特定理。 (1)在时域 频带为F的连续信号 f(t)可用一系列离散的采样值f(t1),f(t1±Δt),f(t1±2Δt),...来表示,只要这些采样点的时间间隔Δt≤1/2F,便可根据各 采样值完全恢复原始信号。 (2)在频域 当时间信号函数f(t)的最高频率分量为fmax时,f(t)的值可由一系列 采样间隔小于或等于1/2fo的采样值来确定,即采样点的重复频率fs ≥2fmax。 2、奈奎斯特采样频率 (1)概述 奈奎斯特采样定理:要使连续信号采样后能够不失真还原,采样频率必须 大于信号最高频率的两倍(即奈奎斯特频率)。 奈奎斯特频率(Nyquist frequency)是离散信号系统采样频率的一半,因哈里·奈奎斯特(Harry Nyquist)或奈奎斯特-香农采样定理得名。采样定理指出,只要离散系统的奈奎斯特频率高于被采样信号的最高频率或带宽,就可 以真实的还原被测信号。反之,会因为频谱混叠而不能真实还原被测信号。 采样定理指出,只要离散系统的奈奎斯特频率高于采样信号的最高频率或 带宽,就可以避免混叠现象。从理论上说,即使奈奎斯特频率恰好大于信号带宽,也足以通过信号的采样重建原信号。但是,重建信号的过程需要以一个低 通滤波器或者带通滤波器将在奈奎斯特频率之上的高频分量全部滤除,同时还 要保证原信号中频率在奈奎斯特频率以下的分量不发生畸变,而这是不可能实 现的。在实际应用中,为了保证抗混叠滤波器的性能,接近奈奎斯特频率的分 量在采样和信号重建的过程中可能会发生畸变。因此信号带宽通常会略小于奈 奎斯特频率,具体的情况要看所使用的滤波器的性能。需要注意的是,奈奎斯 特频率必须严格大于信号包含的最高频率。如果信号中包含的最高频率恰好为
西安电子科技大学-数字信号处理-试卷C答案
Answer to “Digital Signal Processing of 2005” Problem 1 (a) even part: };5.0,1,7,7,5,7,7,1,5.0{---=e X odd part: };5.0,1,3,1,0,1,3,1,5.0{----=o X (b) };20,16,11,94,36,40,31 ,16,12,0{-----=y (c) MATLAB Program n=-4:2; x=[1 -2 4 6 -5 8 10]; [x11,n11]=sigshift(x,n,2); [x12,n12]=sigshift(x,n,-1); [x13,n13]=sigfold(x,n); [x13,n13]=sigshift(x13,n13,-2); [x12,n12]=sigmult(x,n,x12,n12); [y,n]=sigadd(2*x11,n11,x12,n12); [y,n]=sigadd(y,n,-1*x13,n13) Problem 2 (a)w j w j w j w j jw jw e e e e e e X 65424210124)(-----++++++=,()j X e ωis periodic in ω with period 2π (b) MATLAB Program : clear; close all; n = 0:6; x = [4,2,1,0,1,2,4]; w = [0:1:1000]*pi/1000; X = x*exp(-j*n'*w); magX = abs(X); phaX = angle(X); % Magnitude Response Plot subplot(2,1,1); plot(w/pi,magX);grid; xlabel('frequency in pi units'); ylabel('|X|'); title('Magnitude Response'); % Phase response plot subplot(2,1,2); plot(w/pi,phaX*180/pi);grid; xlabel('frequency in pi units'); ylabel('Degrees'); title('Phase Response'); axis([0,1,-180,180]) (c) Because the given sequence x (n)={4,2,1,0,1,2,4} (n=0,1,2,3,4,5,6) is symmetric about 1 32 N α-= =,the phase response ()j H e ω < satisfied the condition :()3j H e ω αωω<=-=- so the phase response is a linear function in ω. (d) 150,350Hz Hz Ω=-; (e) The difference of amplitude and magnitude response:
阵列信号处理对角加载算法matlab程序
%----------对角加载(LSMI 和SMI)方向图----------------------- %总结:这种算法主要给出了一种对角加载值的计算方法,对误差具有一定的稳健性,研究发现 %当数据协方差矩阵中含有信号分量会影响算法的性能。 clearall;clearall;clc; ratio_d_and_w=0.5; N_array=20;%阵列数 N_signal=60;% 样本数 ang1=0*pi/180;%所需信号的方向 SNR=5;%信噪比 ASd=sqrt(10.^(SNR/10)); ang2=40*pi/180;%干扰信号的方向 INR=45;%干噪比 ASi=sqrt(10.^(INR/10)); Sd=ASd*(randn(1,N_signal)+i*randn(1,N_signal));%Sd为所需信号 Si=ASi*(randn(1,N_signal)+i*randn(1,N_signal));%Si为干扰信号 Ni=randn(N_array,N_signal)+i*randn(N_array,N_signal);%Ni内噪声 Desired_Array=zeros(N_array,N_signal); Interferential_Array=zeros(N_array,N_signal); for LL=1:N_signal Interferential_Array(:,LL)=Si(LL)*test(ang2,N_array,ratio_d_and_w).'; Desired_Array(:,LL)=Sd(LL)*test(ang1,N_array,ratio_d_and_w).'; end X=zeros(N_array,N_signal); X= Interferential_Array +Ni; Rx=X*X'/N_signal; mm=std(diag(Rx));%对角加载值的确定下限 %mm=trace(Rx)/N_array;%对角加载值的确定上限 R1=Rx+mm*eye(size(Rx)); R=inv(R1); A_est=test(ang1,N_array,ratio_d_and_w); C= A_est; w_SMI=R*C/(C'*R*C);%对角加载 w_LSMI=inv(Rx)*C/(C'*inv(Rx)*C);%普通的Capon算法
西电数字信号处理上机实验报告
数字信号处理上机实验报告 吉凯 第一次上机 实验一: 设给定模拟信号()1000t a x t e -=,t 的单位是ms 。 (1) 利用MATLAB 绘制出其时域波形和频谱图(傅里叶变换),估计其等效带宽(忽略谱分量降低到峰值的3%以下的频谱)。 (2) 用两个不同的采样频率对给定的()a x t 进行采样。 ○1()()15000s a f x t x n =以样本秒采样得到。 ()()11j x n X e ω画出及其频谱。 ○2()()11000s a f x t x n =以样本秒采样得到。 ()() 11j x n X e ω画出及其频谱。 比较两种采样率下的信号频谱,并解释。 (1)MATLAB 程序: N=10; Fs=5; Ts=1/Fs; n=[-N:Ts:N]; xn=exp(-abs(n)); w=-4*pi:0.01:4*pi; X=xn*exp(-j*(n'*w)); subplot(211) plot(n,xn); title('x_a(t)时域波形'); xlabel('t/ms');ylabel('x_a(t)'); axis([-10, 10, 0, 1]); subplot(212); plot(w/pi,abs(X)); title('x_a(t)频谱图'); xlabel('\omega/\pi');ylabel('X_a(e^(j\omega))');
ind = find(X >=0.03*max(X))*0.01; eband = (max(ind) -min(ind)); fprintf('等效带宽为 %fKHZ\n',eband); 运行结果: 等效带宽为 12.110000KHZ
阵列信号处理作业
阵列信号处理课程2011年作业 第1题 假定半波长间隔均匀分布线列阵的阵元数N =16,若入射平面波为62.5Hz 的正弦信号,信号持续时间为0.4s ,系统采样频率为1kHz ,阵列加权方式为均匀加权。分别给出 1. 当平面波信号分别从0,10, 20, 30, 40, 50, 60, 70, 80, 90, 100度方向入射时,指向90度的波束形成器的输出序列。 2. 当平面波信号分别从0:1:180度方向入射时,指向90度的波束形成器的输出序列经过平方求和后的分贝数输出。(把所有181个输出绘制在同一幅图中) 1)仿真图 图一:所求角度入射信号输出序列三维表示 注: 1. θ为信号入射角度,取值从0度到100度,每10°为一个间隔; 2. T 为整个阵元采样时间,对于不同的入射角度,t 的取值范围不同; 3. 输出信号幅度表示所有阵元的求和输出幅度,为有噪声情况。 结论: 0.8 t 输出信号幅度
从图一可以看出:①从90°入射的信号输出序列没有得到衰减,而其它角度入射的都得到了衰减;②从100°入射的信号和从80°入射的信号输出序列关于90°方向是对称的;③整个阵列对噪声有很好的抑制作用。 图二:入射信号0°到50°的输出序列 图三:入射信号60°到100°的输出序列 结论: 从图二和图三可以看出:①图一的所有结论;②90°方向入射信号没 0.10.20.30.40.5 -0.1 -0.0500.05 0.1 t A m p l i t u d e 0。 0.10.20.30.40.5 -0.1 -0.0500.05 0.1 t A m p l i t u d e 10。 0.10.20.30.40.5 -0.2 -0.100.1 0.2 t A m p l i t u d e 20。 0.10.20.30.40.5 -0.1 -0.0500.05 0.1 t A m p l i t u d e 30。 0.10.20.30.40.5 -0.1 -0.0500.05 0.1 t A m p l i t u d e 40。 0.10.20.30.40.5 -0.1 -0.0500.05 0.1 t A m p l i t u d e 50。 0.10.2 0.30.40.5 t A m p l i t u d e 60。 0.1 0.20.30.4 t A m p l i t u d e 70。 0.1 0.20.30.4 t A m p l i t u d e 80。 0.1 0.20.30.4 t A m p l i t u d e 90。 0.1 0.20.30.4 t A m p l i t u d e 100。
西安电子科技大学数字信号处理上机报告解析
数字信号处理 大作业 院系:电子工程学院 学号:02115043 姓名:邱道森
实验一:信号、系统及系统响应 一、实验目的 (1) 熟悉连续信号经理想采样前后的频谱变化关系,加深对时域采样定理的理解。 (2) 熟悉时域离散系统的时域特性。 (3) 利用卷积方法观察分析系统的时域特性。 (4) 掌握序列傅里叶变换的计算机实现方法,利用序列的傅里叶变换对连续信号、离散信号及系统响应进行频域分析。 二、实验原理 采样是连续信号数字处理的第一个关键环节。对连续信号()a x t 进行理想采样的过程可用(1.1)式表示: ()()()?a a x t x t p t =? 其中()t x a ?为()a x t 的理想采样,()p t 为周期冲激脉冲,即 ()()n p t t nT δ∞ =-∞ = -∑ ()t x a ?的傅里叶变换()j a X Ω为 ()()s 1?j j j a a m X ΩX ΩkΩT ∞=-∞ =-∑ 进行傅里叶变换, ()()()j ?j e d Ωt a a n X Ωx t t nT t δ∞ ∞--∞=-∞??=-? ??? ∑? ()()j e d Ωt a n x t t nT t δ∞ ∞ --∞=-∞ = -∑? ()j e ΩnT a n x nT ∞ -=-∞ =∑ 式中的()a x nT 就是采样后得到的序列()x n , 即()()a x n x nT = ()x n 的傅里叶变换为 ()()j j e e n n X x n ω ω∞ -=-∞ =∑ 比较可知 ()()j ?j e a ΩT X ΩX ωω== 为了在数字计算机上观察分析各种序列的频域特性,通常对() j e X ω 在[]0, 2π上进行M 点采样来观 察分析。对长度为N 的有限长序列()x n ,有 ( )()1 j j 0 e e k k N n n X x n ωω--==∑ 其中2π ,0,1,,1k k k M M ω==???- 一个时域离散线性时不变系统的输入/输出关系为
阵列信号处理—music、Capon
宽带信号中的三种二维平面阵DOA估计宽带信号中的三种二维平面阵DOA估计
一. 背景 目前关于阵列窄带信号的高分辨算法已比较成熟,但是随着信号处理技术的发展,信号环境日趋复杂,信号形式多样,信号密度日渐增大,窄带阵列探测系统的确定逐渐显示出来。 由于宽带信号具有目标回波携带的信息量大,有利于目标探测、参量估计和目标特征提取等特点,在有源探测系统中越来越多地得到应用。而在无源探测系统中,利用目标辐射的宽带连续谱进行目标检测是有效发现目标的一种重要手段。 ISM 方法把宽带信号在频域分解为J 个窄带分量,然后在每一个子带上直接进行窄带处理。因为信号为调频信号,所以信号在时域的分段实际上就是频域的分段。将信号分解为窄带信号后,我们就可以利用窄带算法进行处理,最后将各个结果进行加权综合,即可得到最终的结果。 二维DOA 估计是阵列信号处理中的重要内容,通过二维DOA 估计可以得到信号源在平面中的角度信息。一般采用L 型、面阵和平行阵或矢量传感器实现二维参数的估计,多数有效的二维DOA 估计算法是在一维DOA 估计的基础上,直接针对空间二维谱提出的,如二维MUSIC 算法以及二维CAPON 算法等。这两种算法可以产生渐进无偏估计,但要在二维参数空间搜索谱峰,计算量相当大。而采用二维ROOT MUSIC 算法可以减小计算量,但是需要付出精度下降的代价。 本次报告将结合宽带信号和二维DOA 估计算法,进行相关的算法介绍和仿真。 二. 算法介绍 1. 接收信号模型: 图 1 平面阵列示意图 如图1所示,设平面阵元数为M ×N ,信源数为K 。信源的波达方向为11(,),,(,)k k θφθφ , 第i 个阵元与参考阵元之间的波程差为: 2(cos sin sin sin cos )/i i i x y z βπφθφθθλ=++ 设子阵1沿x 轴的方向矩阵为x A ,而子阵2的每个阵元相对于参考阵元的波程差就等于子阵1的阵元的波程差加上2sin sin /d πφθλ,所以接收信号为
阵列信号处理仿真作业
阵列信号处理仿真作业 需要解决的问题: 使用优化算法(可以使用遗传算法)挑选旁瓣相消的阵元 要求:(只需要选择一个突破点即可) ①可以针对不同类型的干扰、连片杂波、地杂波或密集型干扰等进行优化 ②也可以考虑存在阵列误差 下面我们针对第一个突破点进行仿真: 一、基本原理 图1给出了一般阵元级部分自适应处理的框图,通常称为多旁瓣相消器。 1 N H x 图1. 多旁瓣相消器结构部分自适应处理框图 如图1所示,整个天线阵的阵元加导向矢量权及用于压低旁瓣的锥削,可得到主通道输出0()m t ,0()m t 的方向图就指向目标方向,而从天线阵中选出M 个阵元作自适应单元,自适应单元加权为H x W ,于是得到主通道输出 00()()H m t t =W X ,辅助通道输出为()H x t W Y 。所以整个自适应信号处理器的输出为 0()()()H x e t m t t =-W Y (1) 其中0()m t 表示为主通道的输出;12[,,,]T M y y y =Y L 为选取的辅助单元接收的信 号;12[,,,]H T x M w w w ***=W L 为自适应权值;()H x t W Y 为形成辅助通道的输出。 在最小均方误差的准则下,求出的自适应权值就演变成为一个优化问题 220min ()min ()()H x E e t E m t t ?????-?????? W Y (2) 得
1 0()()()()H H x E t t E t m t -* ????=????W Y Y Y (3) 为了保证目标信号不损失,应对自适应权作约束,约束条件是在目标信号的 方向上,阵列自适应处理的增益为一常数。即在权值调整过程中,无论权x W 怎 样变化,对有用信号的增益不变。这样在使自适应阵输出()e t 的均方值2 ()E e t ?? ?? 最小时,能最大限度地抑制干扰且不损失有用信号能量。图1中应用式( 2) 的无 约束优化方程显然不合理,它不能保证有用信号增益不变。即由于辅助通道中包含有用信号的能量,就会导致辅助阵元中目标信号分量与主通道中目标信号相减,引起目标信号对消,导致目标增益下降。对此,应设法阻塞目标信号进入辅助支路,避免信号对消现象。一种方法是在优化方程中加入单位增益约束,强制目标方向增益不变,这样的优化方程求解比较麻烦,而且不适合自适应单元自动选取的算法。 这里,采用信号阻塞矩阵来抑制目标信号,使目标信号能量不能进入辅助通道。 0=X JX (4) 其中12[,,,]T N x x x =X L 为阵列信号;01020(1)0[,,,]T N x x x -=X L ;J 为信号阻塞矩阵(N -1)×N 。 在一般情况下,信号到达角为0θ,则信号阻塞矩阵J 可表示为 00001exp(())001exp(())01exp(())0 001exp(())j j j j ?θ?θ?θ?θ??--??--=??--??--??J L L L L 其中002()sin()d π?θθλ =,当00θ=?时,阻塞矩阵变为 11000110 0000 11-??-????=? ?????-?? J L L L L L L L L 这样就得到整个自适应系统框图(图2)。 图2中上支路为主通道, 保证信号完全通过,其加权为导向矢量权和压低旁瓣的锥削。下支路为辅助支路,信号阻塞矩阵阻止信号能量通过,将N 个阵元信号变成N -1个信号(降维),然后由辅助单元选择通路并选择参与自适应的单元,加自适应权后与上支路信号相减,得到自适应输出。
西电数字信号处理2012年试题答案
考试时间 120 分钟 考试形式:闭卷 数字信号处理 试题 班级 学号 一、填空(20分,每空4分) 1.5()cos 7 8x n A n π π??=- ???的周期? 14 2. 将两个输入()1cos2x t t π=,()2cos5x t t π=通过一理想采样系统,采样频率为6/s rad s πΩ=,采样后经理想低通滤波器()a H j Ω还原,其中 ()1 320,3a H j π π?Ω;1,整个z 平面。 5. 一系统的极点有4 0.2j e π,4 0.2j e π-,0.4,6 2j e π,6 2j e π-,1.5,在何种情况下系 统为因果系统,在何种情况下系统为稳定系统?2z >为因果系统,0.4 1.5z <<为稳定系统。 二、(15分,每小题5分)简答题 (1) 设有频率为1000Hz 的余弦信号,用采样频率1600s f Hz =对其采样,请利 用采样定理进行分析并给出具体表达式
答: 故采样后为cos(1200)t π (2) 做DFT 提高信号频率分辨率的方法有哪些,对序列进行补零做DFT 能否提 高信号的频率分辨率? 答:通过增加序列的截取长度N 可以提高频率分辨率,对序列补零并不能提高信号的频率分辨率。 (3) IIR 滤波器与FIR 滤波器的优缺点 答:IIR 滤波器可以利用成熟的模拟滤波器进行设计,但是是非线性相位;FIR 可严格线性相位并能够任意幅度特性,且为因果稳定系统,可用FFT 计算,但是阶次比IIR 要高很多。 三、(10分)判断系统是否是线性的、时不变的。 ()()0 n k n T x n x k == ????∑ 解:由()()0 n k n T x n x k == ????∑得 ()()()()()()()()0 121 2 1 2 1 2 n k n n n k n k n T ax n bx n ax k bx k ax k bx k aT x n bT x n ===+= +???????? = +=+???????? ∑∑∑ 所以系统是线性系统。 又因为 ()()()0 0n n m k n k n m T x n m x k m x k -==--= -=????∑∑,()()0n m k n m y n m x k -=--=∑ 即 ()()T x n m y n m =≠-????