刚体动力学分析模块:Rigid Dynamics介绍
ANSYS刚体运动学分析详解
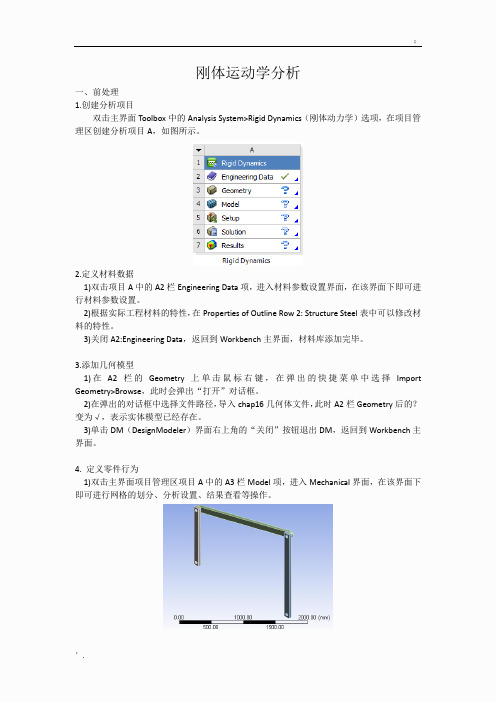
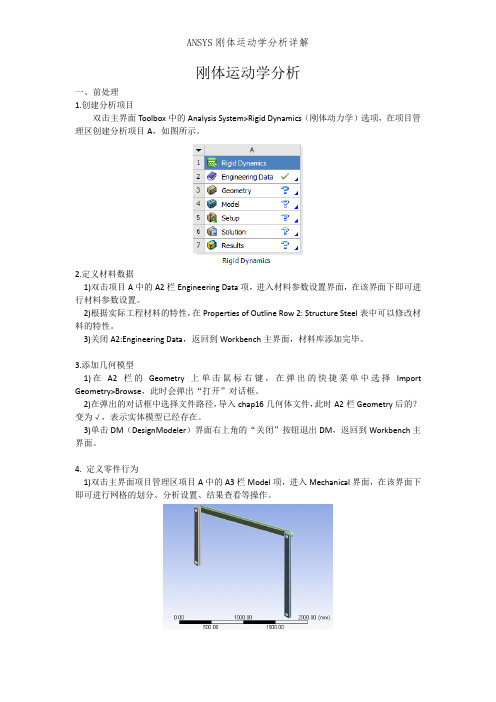
刚体运动学分析一、前处理1.创建分析项目双击主界面Toolbox中的Analysis System>Rigid Dynamics(刚体动力学)选项,在项目管理区创建分析项目A,如图所示。
2.定义材料数据1)双击项目A中的A2栏Engineering Data项,进入材料参数设置界面,在该界面下即可进行材料参数设置。
2)根据实际工程材料的特性,在Properties of Outline Row 2: Structure Steel表中可以修改材料的特性。
3)关闭A2:Engineering Data,返回到Workbench主界面,材料库添加完毕。
3.添加几何模型1)在A2栏的Geometry上单击鼠标右键,在弹出的快捷菜单中选择Import Geometry>Browse,此时会弹出“打开”对话框。
2)在弹出的对话框中选择文件路径,导入chap16几何体文件,此时A2栏Geometry后的?变为√,表示实体模型已经存在。
3)单击DM(DesignModeler)界面右上角的“关闭”按钮退出DM,返回到Workbench主界面。
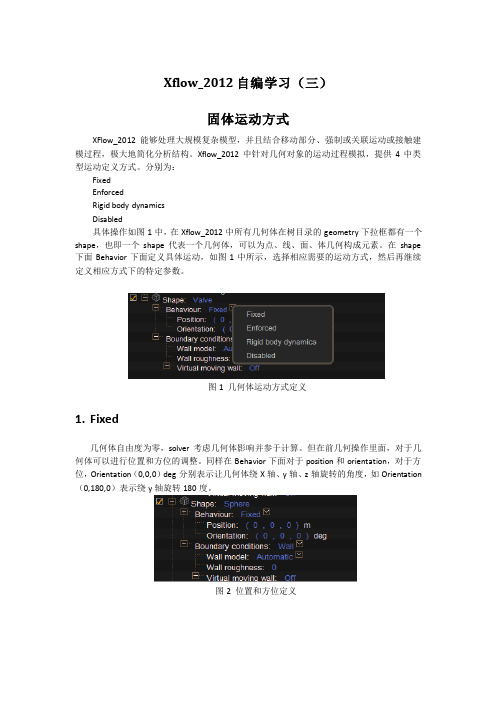
4. 定义零件行为1)双击主界面项目管理区项目A中的A3栏Model项,进入Mechanical界面,在该界面下即可进行网格的划分、分析设置、结果查看等操作。
2)选择Mechanical界面左侧Outline树结构图中Geometry选项下的所有Solid,在Details of “Solid”中确保所有的Solid对象的Stiffness Behavior(刚度特性)均为Rigid(刚性),如图所示。
5.设置连接1)查看是否生成了Contact接触,如存在,则全部删除,如图所示。
2)选择Mechanical界面左侧Outline树结构图中的Connections对象,然后在工具箱中选择Body-Ground>Revolute,此时树结构图中出现Revolute对象。
xflow_2012学习资料(三)固体运动方式定义
Xflow_2012自编学习(三)固体运动方式XFlow_2012能够处理大规模复杂模型,并且结合移动部分、强制或关联运动或接触建模过程,极大地简化分析结构。
Xflow_2012中针对几何对象的运动过程模拟,提供4中类型运动定义方式。
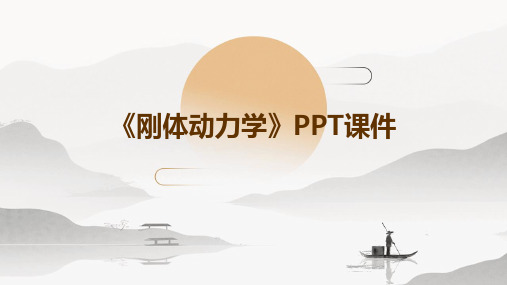
分别为:FixedEnforcedRigid body dynamicsDisabled具体操作如图1中,在Xflow_2012中所有几何体在树目录的geometry下拉框都有一个shape,也即一个shape代表一个几何体,可以为点、线、面、体几何构成元素。
在shape 下面Behavior下面定义具体运动,如图1中所示,选择相应需要的运动方式,然后再继续定义相应方式下的特定参数。
图1 几何体运动方式定义1.Fixed几何体自由度为零,solver考虑几何体影响并参于计算。
但在前几何操作里面,对于几何体可以进行位置和方位的调整。
同样在Behavior下面对于position和orientation,对于方位,Orientation(0,0,0)deg分别表示让几何体绕X轴、y轴、z轴旋转的角度,如Orientation (0,180,0)表示绕y轴旋转180度。
图2 位置和方位定义2.Enforced此类型几何体运动方式定义就是指定运动规律,同时包括位置和角速度两种方式,对于角速度方式,对应两种模式,一是Euler angles欧拉角度,二是Axis angles轴角度。
Euler angles 为指定几何体绕笛卡尔坐标轴旋转动作行为,只需输入绕X、Y、Z轴的角速度;Axis angles 为指定几何体绕任意坐标轴旋转动作,需要输入轴方向和角速度。
其次就是指定位置的定义方式相对比较简单,给定X、Y、Z方向的运动方式。
此两种方式的函数表达式中,可以有效调用的函数变量只能为时间t,即都只能为时间的函数,物理学讲即为运动方程S=S(t)、A=A(t)。
具体设置情况如图3中图3 指定几何体运动方程3.Rigid body dynamics在Xflow_2012中采用rigid body dynamics时,几何体被视为刚体,定义刚体运动方式的六自由度被激活,如X、Y、Z方向上的位置,X、Y、Z矢量轴上旋转,同时每个自由度还可以受到外力或外部动量约束。
《刚体动力学 》课件
牛顿第二定律
物体的加速度与作用在物 体上的力成正比,与物体 的质量成反比。
牛顿第三定律
对于任何两个相互作用的 物体,作用力和反作用力 总是大小相等,方向相反 ,作用在同一条直线上。
刚体的平动
刚体的平动是指刚体在空间中 的位置随时间的变化而变化, 而刚体的形状和大小保持不变
的运动。
刚体的平动具有三个自由度 ,即三个方向的平动。
05
刚体的动力学方程
刚体的动力学方程
牛顿第二定律
刚体的加速度与作用力成正比,与刚体质量 成反比。
刚体的转动定律
刚体的角加速度与作用力矩成正比,与刚体 对转动轴的转动惯量成反比。
刚体的动量方程
刚体的动量变化率等于作用力对时间的积分 。
刚体的自由度与约束
自由度
描述刚体运动的独立变量,如平动自由度和转动 自由度。
约束
限制刚体运动的条件,如固定约束、滑动约束等 。
约束方程
描述刚体运动受约束的数学表达式。
刚体的动力学方程的求解方法
解析法
通过代数运算求解动力学方程,适用于简单问 题。
数值法
通过迭代逼近求解动力学方程,适用于复杂问 题。
近似法
通过近似模型求解动力学方程,适用于实际问题。
06
刚体动力学中的问题与实例 分析
人工智能和机器学习的发展将为刚体 动力学的研究提供新的思路和方法, 有助于解决复杂动力学问题。
感谢您的观看
THANKS
船舶工程
在船舶工程中,刚体动力学 用于研究船舶的航行稳定性 、推进效率以及船舶结构的 安全性等。
兵器科学与技术
在兵器科学与技术领域,刚 体动力学用于研究弹药的发 射动力学、火炮的射击精度 和稳定性等。
ANSYS刚柔混合多体动力学分析技术
• “Sync Views”
• 窗口同步
Joint Features—Reference Coordinate Systems
• 参考坐标系:
• 自动位于joint分支下. • 可以手动更改
Joint Features—Stops
• Stops或者 Lock设置运动副的运动极限或条件. • 当达到相对运动,Stops限制条件会有冲击发生,
Lock则是锁定在固定
• SECSTOP • SECLOCK
Joint Features—DOF Checker (Background)
• 存在过约束问题,也可以计算,但是结果变得不准确. • Question : 模型对称,为什么支反力不对称?
Revolute joint
FX=0 N MY=0 N-m
• 多体动力学和其他模块的连接
Step1 :导入几何
Step2 :定义运动副和接触
使用多窗口工具
自由度检查和过约束分析
Step3 :加载载荷和边界,进行分析设置
载荷可通过直接拖动运动副形式实现
• 载荷步数目
• 初始、最小、 最大时间步
• 输出控制
Step4 :后处理
指定时间点输出
大纲
• 多体动力学分析组成 • 多体动力学分析流程
Random Vibration
A. 多体动力学简介
Ansys中有两种多体动力学分析:
多刚体系统运动分析
• 只包含刚性体 • 求解快 • 由于接触或者运动副产生运动 • 主要求解各个零部件的位移、速度、加速度和反作用力/力矩等历程曲线。 • 支持大变形大旋转效应 • 通过“Rigid Dynamics” 分析ine Connections
刚体动力学接触设置
刚体动力学接触设置英文回答:Rigid body dynamics is a branch of physics that deals with the motion and forces experienced by rigid bodies. In this context, a rigid body is an object that does not deform under the influence of external forces. It maintains its shape and size throughout its motion.Contact settings in rigid body dynamics refer to the conditions and parameters that are used to model and simulate the interactions between two or more rigid bodies when they come into contact with each other. These settings are essential for accurately predicting the behavior of objects in contact and for simulating realistic physical phenomena.There are various aspects that need to be considered when setting up contact in rigid body dynamics. One important aspect is the definition of contact constraints.These constraints determine how the bodies interact with each other at the contact point. For example, the contact may be modeled as frictionless, meaning that there is no resistance to relative motion at the contact point. Alternatively, the contact may be modeled as having friction, which introduces a resistance force that opposes the relative motion between the bodies.Another aspect to consider is the contact detection algorithm. This algorithm determines when and where contacts occur between bodies. It is important to have an accurate and efficient contact detection algorithm to ensure that all relevant contacts are detected and properly accounted for in the simulation.In addition, the material properties of the bodies in contact play a significant role in determining their behavior. For example, the elasticity and hardness of the materials can affect the amount of deformation and energy dissipation during contact. These properties need to be defined and incorporated into the simulation to accurately represent the physical behavior of the bodies.Furthermore, the resolution of contacts is an important consideration. When bodies come into contact, there may be interpenetration or overlap between them. This needs to be resolved by applying appropriate forces or impulses to separate the bodies and prevent them from occupying the same space. The resolution method used can affect the stability and accuracy of the simulation.To illustrate the importance of contact settings in rigid body dynamics, let's consider the example of abilliard game. When the cue ball strikes another ball, the contact settings determine how the two balls interact. If the contact is modeled as frictionless, the balls willslide past each other without any resistance. On the other hand, if the contact is modeled with friction, the balls will experience a resistance force that causes them to roll and come to a stop more quickly.中文回答:刚体动力学是物理学的一个分支,研究刚体所经历的运动和受力情况。
刚体运动的基本原理与动力学分析

刚体运动的基本原理与动力学分析刚体运动是物理学中的重要概念,研究刚体的基本原理和动力学分析对于理解力学运动规律具有重要意义。
本文将从刚体的定义、刚体运动的基本原理,以及刚体的动力学分析等方面展开论述。
一、刚体的定义刚体是指在力的作用下,保持形状和体积不变的物体。
刚体的特点是不易变形,内部各点之间的相对位置保持不变。
二、刚体运动的基本原理1. 平动和转动刚体运动可以分为平动和转动两种形式。
平动是指刚体上所有点按照相同方向和相同距离运动,转动是指刚体绕着某个轴旋转。
2. 受力和力矩刚体的运动受到外力的作用,外力可以分为接触力和非接触力。
接触力是指物体之间直接接触施加的力,非接触力是指物体间通过场的相互作用施加的力,如重力和电磁力等。
另外,刚体的转动还受到力矩的影响。
力矩是由作用力与力臂的乘积,用来描述力对刚体的转动效果。
力矩的方向由右手定则确定,大小等于力的大小与力臂的长度之积。
3. 刚体的运动学方程刚体的运动学方程描述了刚体在运动过程中各个部分的位置、速度和加速度之间的关系。
根据牛顿第二定律和运动学关系可以得到刚体的运动学方程。
三、刚体的动力学分析1. 平动的动力学分析刚体的平动运动可以通过牛顿第二定律进行动力学分析。
根据牛顿第二定律可知,刚体所受的合外力等于刚体的质量与加速度的乘积。
2. 转动的动力学分析刚体的转动运动需要通过力矩和转动惯量进行动力学分析。
根据牛顿第二定律可知,刚体所受的合外力矩等于刚体的转动惯量与角加速度的乘积。
此外,刚体的角动量和动能也是进行动力学分析的重要物理量。
角动量等于刚体的转动惯量与角速度的乘积,动能等于刚体的转动惯量与角速度的平方的乘积的一半。
四、刚体运动的应用刚体运动的研究在工程、医学等领域有广泛应用。
例如在机械工程中,对机械零件的运动进行分析可以用于设计和优化机械结构;在生物医学中,对人体骨骼系统的运动学和动力学分析可以用于疾病的诊断和康复治疗。
总结:刚体运动的基本原理和动力学分析是研究力学运动规律中的重要内容。
动力学中的刚体运动分析

动力学中的刚体运动分析动力学是物理学的一个分支,研究物体在受到力的作用下的运动规律。
刚体运动是动力学中的一个重要内容,刚体是指形状不会发生变化的物体,它的各个部分在同一时间内有相同的速度和加速度。
本文将对动力学中的刚体运动进行详细分析。
一、刚体的基本概念刚体是一个理想化的物体,它具有以下基本特征:1. 完全刚性:刚体的所有部分都是刚性连接的,不会发生形状上的变化。
2. 不可伸缩:刚体的各个部分不会发生伸缩变形。
3. 不可旋转:刚体在运动过程中不会发生自转。
刚体可以用来模拟很多实际物体,如棍子、车辆等,通过对刚体的运动进行研究,我们可以更好地理解物体在力的作用下的运动规律。
二、刚体运动的基本性质刚体运动具有以下几个基本性质:1. 平动:刚体上的任意两点都具有相同的位移和速度。
2. 定点旋转:刚体绕固定轴线作定点旋转运动,其各个部分仅有的位移是纯粹的旋转位移。
3. 平面运动:刚体运动可以限制在一个平面内进行。
三、刚体运动的描述刚体的运动可以通过位置、速度和加速度三个方面的描述来进行分析。
1. 位置描述:刚体的位置可以通过选择一个坐标系以确定刚体的位置矢量来描述。
常用的坐标系有直角坐标系和极坐标系。
2. 速度描述:刚体的速度可以通过位置的变化率来描述,即位置矢量对时间的导数。
刚体的速度矢量与位矢的方向相同。
3. 加速度描述:刚体的加速度可以通过速度的变化率来描述,即速度矢量对时间的导数。
刚体的加速度矢量与速度矢量的方向相同。
四、刚体的运动方程刚体的运动可以通过牛顿运动定律以及动力学中的一些基本定理来描述。
1. 牛顿第二定律:刚体受到的合外力等于其质量与加速度的乘积,即F=ma。
2. 刚体的角动量定理:刚体的角动量的变化率等于合外力对刚体的力矩,即L=dL/dt=τ。
3. 刚体的动能定理:刚体的动能的变化率等于合外力对刚体的功,即dK/dt=P。
根据这些定律和公式,我们可以对刚体的运动进行定量的描述和计算。
ANSYS刚体运动学分析详解
刚体运动学分析一、前处理1.创建分析项目双击主界面Toolbox中的Analysis System>Rigid Dynamics(刚体动力学)选项,在项目管理区创建分析项目A,如图所示。
2.定义材料数据1)双击项目A中的A2栏Engineering Data项,进入材料参数设置界面,在该界面下即可进行材料参数设置。
2)根据实际工程材料的特性,在Properties of Outline Row 2: Structure Steel表中可以修改材料的特性。
3)关闭A2:Engineering Data,返回到Workbench主界面,材料库添加完毕。
3.添加几何模型1)在A2栏的Geometry上单击鼠标右键,在弹出的快捷菜单中选择Import Geometry>Browse,此时会弹出“打开”对话框。
2)在弹出的对话框中选择文件路径,导入chap16几何体文件,此时A2栏Geometry后的?变为√,表示实体模型已经存在。
3)单击DM(DesignModeler)界面右上角的“关闭”按钮退出DM,返回到Workbench主界面。
4. 定义零件行为1)双击主界面项目管理区项目A中的A3栏Model项,进入Mechanical界面,在该界面下即可进行网格的划分、分析设置、结果查看等操作。
2)选择Mechanical界面左侧Outline树结构图中Geometry选项下的所有Solid,在Details of “Solid”中确保所有的Solid对象的Stiffness Behavior(刚度特性)均为Rigid(刚性),如图所示。
5.设置连接1)查看是否生成了Contact接触,如存在,则全部删除,如图所示。
2)选择Mechanical界面左侧Outline树结构图中的Connections对象,然后在工具箱中选择Body-Ground>Revolute,此时树结构图中出现Revolute对象。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
刚体动力学分析模块:Rigid Dynamics 介绍
Rigid Dynamics 是ANSYS Structural(或更高级的Mechanical 或Multiphysics)产品的一个附加模块,它集成于Workbench 环境下,在Structural 所具有的柔性体动力学(瞬态动力学)分析功能的基础上,基于全新的模型处理方法和求解算法,专用于模拟由运动副和弹簧连接起来的刚性组件的动力学响应。
继承了Workbench 与各CAD 之间良好的双向参数链接能力,Rigid Dynamics 直接以参数化方式导入复杂的CAD 运动装配模型,基于其提供的完整的运动副类型来自动定义构件的运动关系,并提供了丰富的载荷库,以此来创建完全参数化的机械系统动力学计算模型。
在求解算法上,Rigid Dynamics 采用了无需迭代计算和收敛检查的显式积分技术,并提供了自动时间步功能,来快速求解复杂系统的动力学特性,输出位移、速度、加速度和反作用力等历程曲线。
由于无缝集成(且必须集成)于Structural 模块(及更高模块)之上,因此它可以与Structural 模块的Flexible Dynamics(柔性体动力学分析/瞬态动力分析)功能直接耦合进行线性和非线性(如大变形几何非线性、接触、弹塑性、橡胶超弹性等)结构的刚柔混合动力学分析,用户可任意指定各部件的刚柔属性(以及材料非线性等),求解完毕即可输出柔性部件的变形与应变。
特色功能
∙ 与CAD 软件双向参数传递
o 嵌入式(双向参数链接)CAD 接口:Pro/E、UG、SolidWorks、CATIA 等。
o 标准格式文件读取:Parasolid、SAT、IGES 等。
o 双向参数互动:Rigid Dynamics 与CAD 模型紧密集成。
∙ 自动探测运动副
o Rigid Dynamics 利用自动探测运动副功能来建立零件之间的连接关系。
o 根据自动探测的结果,可以快速修改运动副的连接关系。
∙ 完整的运动副类型和弹簧
广州有道科技培训中心 h
t t p ://w w w .020f e a .c o m
o Rigid Dynamics 利用完整的运动副类型(固定、转动、柱面滑动和转动、平动、
滑槽、万向连接、球铰、平面运动、自定义等) 和弹簧来建立零件之间的连接,提供精确的定位方法保证零件间的定位。
o Rigid Dynamics 提供体对体(BTB)和体对地(BTG)等连接方法。
∙ 与Flexible Dynamics 直接耦合
o Rigid Dynamics 可以和Structural 模块的Flexible Dynamics 功能在Workbench
中实现无缝集成,一次求解同时得到结构运动结果和强度/变形结果等,并支持柔性体的各种非线性特性(如接触、大变形、材料非线性等)。
o 用户可自由定义零件为刚体或柔体,设置相关求解属性,直接计算刚体的位移、
速度、加速度和反作用力以及柔体的变形和应力。
o 真正意义上实现了刚柔动力学分析的直接耦合。
∙ Rigid Dynamics 独特的前后处理
o Windows 操作风格
o 目录树管理模型数据库
o 支持两个零件连接面(运动关系)的清晰显示
o 快速高质量的动画显示效果
o 支持多窗口画面分割显示
o 自动生成计算报告
广州有道科技培训中心 h t t p ://w w w .020f e a .c o m。