重力驱动小车的结构设计及运动仿真分析
以重力势能驱动的具有方向控制功能小车的设计
以重力势能驱动的具有方向控制功能小车的设计摘要:本文根据竞赛命题“无碳小车”,即给定一重力势能,根据能量转换原理,设计一种可将该重力势能转换为动能来驱动小车行走的装置。
该小车要求采用三轮结构(1个转向轮,2个驱动轮),并且小车在前行时能够自动避开赛道上设置的障碍物(每间隔1米,放置一个直径20mm、高200mm的弹性障碍圆棒)。
本小车最大的亮点是采用两边对称的永久磁铁固定车的车把,周期性使车把左右固定,使小车一直走的路线是相切的圆弧,从而实现绕过障碍物。
本文将对小车的设计过程和亮点进行阐述。
关键词:无碳小车自动转弯圆弧路线重力1引言随着资源越来越少,而需求量越来越大的发展趋势,研究无碳能源越来越受到关注,本文设计的无碳小车就是一次小的创新。
本研究就是来自第二届全国大学生工程训练综合能力竞赛赛题,通过设计研究,即围绕命题“无碳小车”,不利用有碳能源,即根据能量转换原理,将重力势能转换为小车的动能,并能实现自动转弯绕障碍的功能。
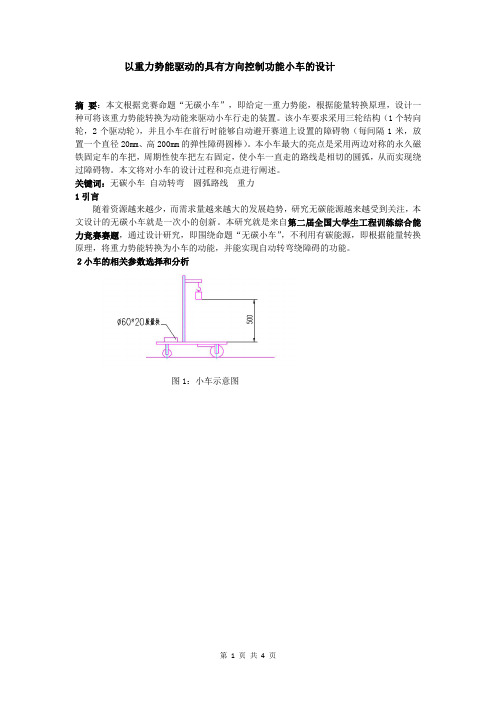
2小车的相关参数选择和分析图1:小车示意图图2为小车的三维图1)上图为小车的主要结构图A 转向把B 永久磁铁C 打片(对称的两个)D 驱动转向把的装置E 重物F 前后皮带轮G 转向轮H 驱动轮 I支架 J直铁丝2)工作原理:利用重物的重力势能转化为小车前行的动能,同时带动皮带轮实现前轮转向 以下是工作示意图3)理论计算小车参数:重物1Kg小车总重: m=2.5kg(带重物与载荷)小车后轮直径Ø=110 绳索缠绕的直径为Ø=7启动前直径大于10,这样便于小车启动。
受力如图所示列平衡方程ΣFx=0 Pcos α-Fs=0Σfy=0 Fn + Psin α- mg=0ΣM(F)=0 Mf – Pcos α·h -Psin α·d =0DB F 1CEF 2AHGIJ有上方程解得Fs=Pcosα,Fn =mg- Psinα,Mf = Pcosα·h + Psinα·d小车不滑动即Fs<Fmax,即小车不滑动的条件是Pcosα<fsFn=fs(mg-Psinα)代入数据重物P=10N, α取85°,fs取0.1,(其中α为绳索和水平线的夹角,fs为地板摩擦系数)。
重力驱动下恒定周期S形行进轨迹玩具车设计
学号:24101900076 南湖学院毕业设计(论文)题目:重力驱动下恒定周期S 形行进轨迹玩具车设计作者XXXX 届别XXXX 系别XXXX 专业XXXXX 指导老师XXXX 职称XXXXX 完成时间XXXXXX摘要本文提出一种“无碳”设计方法,由重力势能转化为机械能,从而利用转化的机械能驱动玩具小车行走的设备。
同时保证玩具小车能够以S形路线自动交错绕过道路上设置的障碍物。
此模型最大的特点是将重力势能转化为齿轮的转动,进而根据大小齿轮的粘合带动驱动轮和转向轮,进行周期性的摆动,从而按照规定的路线越过障碍物,完成任务。
此文章对小车运动的实现机构建立数学模型,利用数学软件绘制小车前行的轨迹,选择最优路线,并进行零件尺寸的精确设计,我们采用MATLAB、PROE等软件辅助设计。
我们把小车的设计分为三个阶段:方案设计、技术设计、制作调试。
并且通过每一阶段的深入分析、层层把关,使我们的设计尽可能向最优设计靠拢。
小车大多零件是标准件,可以购买到,除部分要求加工精度高的零件外,需要特殊加工完成,其余都可以通过手工加工出来。
如对于塑料会采用自制的‘电锯’切割。
因为小车受力都不大,因此大量采用胶接,简化零件与零件装配工序。
调试过程会通过微调等方式改变小车的参数进行试验,在试验的基础上验证小车的运动规律同时确定小车最优的参数。
关键词:Pro/Engineer;S形轨迹;恒定周期;机构;虚拟设计AbstractThis paper presents a "carbon" design approach, in fact, by the gravitational potential energy into mechanical energy, the design of a green energy gravitational potential energy can be converted to mechanical energy to drive the car and walking devices. While ensuring that the S-shaped toy car can automatically route around obstacles staggered set on the road. The greatest feature of this model is the gravitational potential energy into rotating gears, thereby bringing the adhesive according to the size of the gear wheels and steering wheel, swing periodically and the cycle is constant, so in accordance with the provisions of the route over obstacles, complete the task. The car which the title select is movement to achieve institutions to establish the mathematical model, the use of mathematical software to draw the trajectory of the car forward, choose the best route, and the precise design of the part size. Drawing on parametric design, optimization design, system design, such as the invention of modern design theory; using MATLAB、Pro/E、software-aided design. The design of the car is divided into three phases: design, technical design, production and commissioning. Through in-depth analysis of each stage, checks at each level, our design as much as possible to move closer to the optimal design. Most car parts are standard parts, can be purchased in addition to part of the requirements for high precision machining parts require special processing, most can be processed by hand out. For plastic will use homemade 'Chainsaw' cutting. Because the car which by forcing is not large, so a large number of bonding to simplify the assembly of parts and components. Debugging process will change the parameters of the car by way of fine-tuning test to verify the law of motion of the car at the same time to determine the parameters of the best car on an experimental basis.Keyword: Pro/Engineer, S-shaped trajectory, Constant cycle, Agency, Virtual Design目 录第一章 绪 论 (1)1.1 引言 (1)1.2 小车整体设计要求 (2)1.3小车的设计方法 (2)1.3.1小车结构设计 (2)第二章 方案设计 (3)2.1 工作原理 (3)2.1.1原动机构 (4)2.1.2 转向部分 (4)2.1.3 转向部分设计 (6)2.1.4 行走机构 (7)2.1.5 无碳小车行走S 形轨迹的计算 (8)2.1.6 无碳小车行驶中恒定周期的计算 (10)2.1.7 微调机构 (11)第三章 技术设计 (11)3.1 技术设计要求 (11)3.2转向与微调设计 (11)3.2.1小车的转向控制 (11)3.2.2前轮转向轮最大偏角m 的计算 (14)3.2.3微调机构的设计和分析 (15)第四章 建立数学模型及参数的确定 (16)4.1 能耗规律模型 (16)4.2 运动分析 (19)4.3动力学分析 (20)4.5 各参数的确定 (22)4.6 整体设计装配图 (23)第五章 全文总结 (24)5.1 小车优缺点 (24)5.2 改进方向 (24)参考文献 (25)致 谢 (26)第一章绪论1.1 引言第三届全国大学生工程训练综合能力竞赛命题主题为“无碳小车”。
重力势能驱动的“8”字型自控越障车设计

本科毕业设计题目:重力势能驱动的“8”字型自控越障车设计摘要我的毕业设计题目是“重力势能驱动的“8”字型自控越障车设计”。
设计过程中小车的设计方法极其关键,首先论文思路要明确;而在设计过程中,选材、建模以及加工过程中要考虑充分。
我借鉴了一些现代发明理论例如对系统、参数的优化设计等;并采用了WINDOWS、MATLAB、PROE等辅助设计软件。
根据方案我将小车的机器构成分为六个部分,进行分步设计。
针对每一个部件设计切合的方案,通过筛选对比选出其中最好的方案组合。
我的方案最终确定为:选用三角底板式车架、锥形轴原动结构、传动结构选用齿轮或无需该机构、采用槽轮结构及曲柄连杆作为转向机构、行走结构采用单轮驱动实现差速、微调结构采用微调螺母螺钉。
在设计阶段我先建立了模型进行分析,利用TMATLAB对能耗、运动、动力及灵敏度等方面进行了分析。
进而获取了一部分有关小车运动的数据。
然后用PROE 三维软件模拟小车的实体建模以及模拟小车的部分运动。
根据方案我将小车的机器构成分为六个部分,进行分步设计。
针对每一个部件设计切合的方案,对塑料可采用切割,因为小车只是个试验模型,所以部分零件采用了木板、塑料等轻便材料,因为零件大多采用胶水衔接。
在调试过程中只需要微调便可改变小车参数,在设计阶段我先建立了模型进行分析,利用TMATLAB 对能耗、运动、动力及灵敏度等方面进行了分析。
方便试验的过程中验证小车运动规律,确立小车最优的参数。
关键词:8字型轨迹无碳参数辅助微调机构灵敏度ABSTRACTThe title of my graduation project is "8 track without carbon car".In the process of design, the design method of car is very important,First of all, the thesis should be clear;In the design process, material selection, modeling and processing should be considered fully.I draw lessons from some modern inventions such as the optimization design of the system and the parameters, and use WINDOWS, MATLAB, PROE and other auxiliary design software.My thesis is divided into four parts, which is particularly important because of the design of the car so I will design the car is divided into three stages.According to the plan, I will be divided into six parts of the car machine, step by step design.For each part of the design of the program, through the selection of the best combination of screening and comparison.I plan to finalize the selection: the triangular floor frame, conical shaft driving structure, selection of gear transmission structure with or without the use of Geneva mechanism, structure and crank as steering mechanism driven by a single wheel walking structure to achieve differential, trimming structure by trimming nut screw.In the design phase, I first set up the model for analysis, the use of TMATLAB energy consumption, motion, power and sensitivity analysis.And then get a part of the car movement data.Then use PROE 3D software to simulate the solid modeling of the car and simulate the movement of the car.After a variety of factors on the impact of the car I also in the solid modeling based on the detailed design of each part of the car.Because most parts of the car can be used to buy standard parts, in addition to a small part because of the high processing accuracy of the reasons for the need for special processing, the majority of parts can be met by manual processing.The plastic can be cut, because the car is only a test model, so part of the use of wood, plastic andother lightweight materials, because most of the parts using glue.In the process of debugging, it is necessary to fine tune the parameters of the car, to facilitate the test process to verify the law of motion of the car, to establish the optimal parameters of the car.Keywords:8 - Track carbon Carbonles fine-tuning mechanism sensitive目录1 论述 (1)1.1小车示意图 (1)1.2小车的设计要求 (1)1.3整体方案设计 (2)1.4小车的设计方法 (2)2 具体方案设计 (4)2.1车架设计 (6)2.2小车动力机构设计 (6)2.3传动机构 (6)2.4转向机构 (6)2.5行走机构 (7)2.6微调机构 (8)3 技术设计 (10)3.1能耗规律模型 (10)3.2运动学分析模型 (12)3.3动力学分析模型 (14)4 三维建模及工程图纸绘制 (17)4.1主要零件的建模及分析 (17)4.1.1 齿轮 (17)4.1.2 轴 (17)4.1.3 底板 (18)4.1.4 绕线筒 (18)4.1.5 曲柄 (19)4.1.6 前叉 (19)4.1.7 车轮 (19)4.2.机架机构 (20)4.2.1原动机构 (21)4.2.2 传动机构 (22)4.2.3 驱动机构 (23)4.2.4 转向机构 (23)5 小车调试及改进 (25)5.1小车调试方法 (25)5.2小车改进方法 (25)6 总结体会 (26)参考文献 (27)致谢 (28)1 论述现如今,科学技术发展迅速,人们生活水平得到不断优化及提高,然而环境污染的问题也日益严重,可持续发展意识已成为世界潮流,“低碳生活”的观念已达成共识。
基于Andriod重力感应控制的小车设计与研究
基于Andriod重力感应控制的小车设计与研究摘要:该次项目主要研究的内容是在上位机的Andriod平台上编写JA V A应用程序,通过利用自身的蓝牙模块发送重力感应系统检测到的方向数据。
下位机的蓝牙模块把上位机传输过来的信号通过异步通信的方式与单片机互传数据,从而遥控小车的运动情况,实现控制了小车的前进、后退、左转、右转、停止等运动状态。
整个系统的设计主要分成两部分,分别是上位机的Andriod平台的程序开发以及下位机与蓝牙的通信设计,难点在Andriod平台上读取重力感应系统的数据。
整个项目主要是在获取重力感应系统的方向数据后通过蓝牙模块进行数据传输而实现遥控功能,需要一个在Andriod平台上稳定可靠的JA V A应用程序保证系统的可行性。
关键词:Andriod;小车;控制;蓝牙;通信中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2014)15-3636-04Based on the Android Accelerometer Control Car Design and ResearchCHEN Jin-ru,PENG Xin-yun(School of Physics and Mechanical & ElectricalEngineering ,Shaoguan College,Shaoguan 512005,China )Abstract:This project mainly studies on the PC of the Android platform is the content of the writing JA V A applications,by using its own bluetooth module sending accelerometer system to detect the direction of the data. Bluetooth module to PC machine under transmission of signal with single-chip microcomputer by means of asynchronous communication data,and remote control car movement situation,realize the control of the car forward,backward,turn left,turn right,stop motion etc. The design of the whole system mainly divided into two parts,respectively is upper machine under the Android platform application development and a machine and the bluetooth communication design,the difficulty on the android platform read data of gravity sensing system. The whole project is mainly after obtain the direction of the accelerometer system data via bluetooth module for data transmission and remote control function,need a stable and reliable on the Android platform of the JA V A application ensure the feasibility of the system.Key words:Andriod ;the car;control;bluetooth;communication随着现今网络化的发展,智能小车也逐渐的被网络化,不再只有传感器,控制器和执行器三部分。
重力势能驱动的自控无碳小车设计
中图分类号 : T H1 2 2
文献标识码 : A
文章编 号 : 1 6 7 2 — 5 4 5 X ( 2 0 1 7) 0 4 — 0 0 3 9 — 0 3
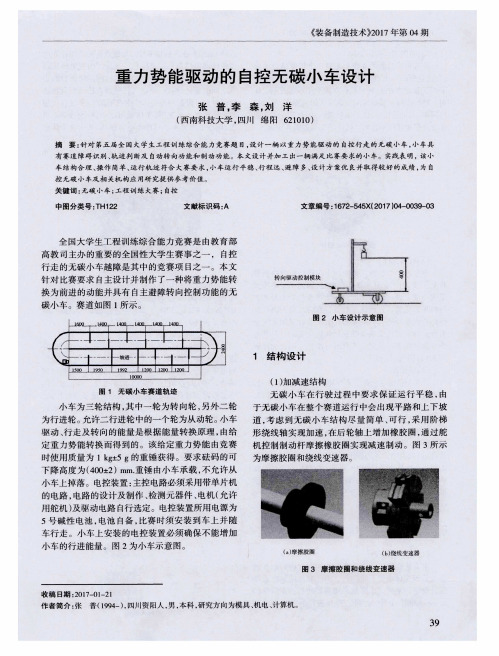
全 国大学生工程训练综合 能力竞赛是 由教育部 高 教 司 主办 的重 要 的全 国性 大 学 生赛 事 之 一 , 自控 行走 的无碳小车越障是其 中的竞赛项 目之一 。本文 针对 比赛 要 求 自主设 计 并 制 作 了 一种 将 重 力 势 能转 换 为前进 的动能并具有 自主避障转 向控制功能的无 碳 小 车 。赛道 如 图 1 所示 。
图 2 小 车 设 计 示 意 图
转向驱动控制模块
』‘ L 广蚴T - 厂衄r岫 T _ J 蚰 ]
一 一 -
I 一 - I …I ~ _ - { …L 一 + — 一 宣
.
1 — l
l 性 坦 I
l 【 x X 】 0
1
7
.
I
I
7
鹱
图 4 转 向 轮 设 计
( 3 ) 材料 选 择
小 车 的加 工 ,首先 考 虑 到 小 车运 行 路 段 曲折 且 有 上 下坡 , 为 了保 证 小车 运 行 稳 定 , 因此 小 车 不能 太
用舵 机 ) 及 驱 动 电路 自行选 定 。电控 装 置所 用 电源 为
形绕线轴实现加速 , 在后轮轴上增加橡胶 圈, 通过舵
机 控 制 制 动杆 摩 擦 橡 胶 圈实 现 减 速制 动 。 图 3所 示 为摩擦 胶 圈 和绕 线变 速 器 。
5号 碱 性 电池 , 电 池 自备 , 比赛 时 须 安 装 到 车 上 并 随 车 行走 。小 车 上 安 装 的 电控 装 置 必 须确 保 不 能 增 加 小 车 的行进 能 量 。 图 2为小 车示 意 图 。
以重力势能驱动的具有方向控制功能的自行小车

无碳小车设计说明书班级:过控09-2班姓名:候朋远团队成员:候朋远曾金石2012.10目录一竞赛命题及参赛项目 (3)二设计思想 (4)三传动机构方案拟定 (5)四工作过程 (11)2一竞赛命题及参赛项目竞赛命题I:以重力势能驱动的具有方向控制功能的自行小车。
设计一种小车,驱动其行走及转向的能量是根据能量转换原理,由给定重力势能转换来的。
给定重力势能为4焦耳(取g=10m/s2),竞赛时统一用质量为1Kg的重块(¢50×65 mm,普通碳钢)铅垂下降来获得,落差400±2mm,重块落下后,须被小车承载并同小车一起运动,不允许从小车上掉落。
图1为小车示意图。
具体要求:(1)小车前行过程中完成的所有动作所需的能量均由此能量转换获得,不可使用任何其他的能量形式;(2)小车具有转向控制机构,且此转向控制机构具有可调节功能,以适应放有不同间距障碍物的竞赛场地;(3)小车为三轮结构,具体设计、材料选用及加工制作均由参赛学生自主完成。
小车示意图无碳小车在重力势能作用下自动行走示意图参赛项目:竞赛命题II:第一阶段:小车在半张标准乒乓球台(长1525mm、宽1370mm)上,绕放置在中线上相距不小于300mm距离(具体距离自定)的2个障碍物沿8字形轨迹绕行,出发点自定,绕行时不可以撞倒障碍物,不可以掉下球台。
障碍物为直径20mm、长200mm的2个圆棒,以小车完成8字绕行圈数的多共12 页少来综合评定成绩。
第二阶段:经比赛现场公开抽签,在300-500mm范围内产生一个新的障碍物间距。
本组各队根据调整后的障碍间距,对自己的小车进行调整装配或修配。
组委会在现场提供普通车床、钳工台及调试场地。
在规定的时间内,各队应完成调整修配内容。
本组各队携带调整修配后小车,在调整障碍间距后的竞赛场地上,进行比赛。
二设计思想1、传递主动力的机构越多,传递效率越低;2、单周期路径越短,能量损失越少;3、物块下落的最终速度越慢,小车获得的能量越多;4、车身越轻,阻力越小,有效功越多;5、整车重心越低,车子越稳定;4三传动机构方案的拟定原理分析:三轮车绕杆和实际车体转向过程原理相同,车体转向时方向控制轮(此处为前轮)与车体轴线产生夹角a,此时后轮轴线与前轮轴线相交于远处一点,当夹角a不变时,实际汽车后轮为差动连接,所以车体绕该点做转动。
以重力势能驱动的具有方向控制功能的自行小车设计共31页PPT

21、要知道对好事的称颂过于夸大,也会招来人们的反感轻蔑和嫉妒。——培根 22、业精于勤,荒于嬉;行成于思,毁于随。——韩愈
23、一切节省,归根到底都归结为时间的节省。——马克思 24、意志命运往往背道而驰,决心到最后会全部推倒。——莎士比亚
以重力势能驱动的具有方向控制功能的 自行小车设计
56、极端的法规,就是极端的不公。 ——西 塞罗 57、法律一旦成为人们的需要,人们 就不再 配享受 自由了 。—— 毕达哥 拉斯 58、法律规定的惩罚不是为了私人的 利益, 而是为 了公共 的利益 ;一部 分靠有 害的强 制,一 部分靠 榜样的 效力。 ——格 老秀斯 59、假如没有法律他们会更快乐的话 ,那么 法律作 为一件 无用之 物自己 就会消 灭。— —洛克
25、学习是劳动,是充满思想的劳动
重力驱动的机械式小车设计方案

重力驱动的机械式小车设计方案工程训练综合能力竞赛的目的在于培养大学生的创新能力、综合设计能力和协作精神,加强学生动手能力的培养和工程实践的训练。
一、主题与容本届竞赛主题为"无碳小车越障竞赛"。
参赛队伍最终制作完成一辆由重力驱动的机械式小车,按照规则完成比赛。
1.竞赛主题:本届竞赛主题为"无碳小车越障竞赛"。
要求经过一定的前期准备后,在比赛现场完成一套符合本命题要求的可运行装置,并进行现场竞争性运行考核。
2.竞赛命题:以重力势能驱动的具有方向控制功能的自行小车设计一种小车,驱动其行走及转向的能量是根据能量转换原理,由给定重力势能转换来的。
给定重力势能为4焦耳〔取g=10m/s2,竞赛时统一用质量为1Kg的重块〔¢50×65 mm,普通碳钢铅垂下降来获得,落差400±2mm,重块落下后,须被小车承载并同小车一起运动,不允许从小车上掉落。
图1为小车示意图。
图1:无碳小车示意图要求小车行走过程中完成所有动作所需的能量均由此重力势能转换获得,不可使用任何其他的能量来源。
要求小车具有转向控制机构,且此转向控制机构具有可调节功能,以适应放有不同间距障碍物的竞赛场地。
要求小车为三轮结构,具体设计、材料选用及加工制作均由参赛学生自主完成。
3.竞赛项目:竞赛小车在前行时能够自动交错绕过赛道上设置的障碍物。
障碍物为直径20mm、高200mm的多个圆棒,沿直线等距离摆放。
以小车前行的距离和成功绕障数量来综合评定成绩。
见图2。
图2:无碳小车在重力势能作用下自动行走示意图携带制作完成的作品,在集中比赛现场,加载由竞赛组委会统一提供的势能重块〔¢50×65 mm普通碳钢,质量为1Kg,在指定的赛道上进行比赛,赛道宽度为2米,赛道边界线是40mm。
出发端线距第一个障碍及障碍与障碍之间的间距均为1米。
小车出发时不准超过出发端线和赛道边界线,小车位置及角度自定,每队有2次机会,计算时取2次成绩中的最好成绩。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计(论文)
重力驱动小车的结构设计及运动仿真分析
院别
控制工程学院
专业名称
机械工程及自动化
班级学号
3122218
学生姓名
孙衍宁
指导教师
单泉
2016年6月10日
重力驱动小车的结构设计及运动仿真分析
摘要
本文设计的重力驱动小车利用滑轮组将重物块的重力势能转换为小车的动能使之行走,并通过空间曲柄摇杆机构来控制前轮左右周期性转向,以此来避开障碍物。所设计的传动系统与转向系统结构简单,传动件少,降低了小车的传动损耗,从而让小车行走更远更平稳。
Utilizing the advantages of the inventor in the design, according to theprogramof thestructure, 3D modelingis developed by inventor.Seeing3D animation simulation and testingcar the moving part whether there is interference, the proportion of the car is harmonious.
在小车的设计过程中,注重有限势能的优化利用、车体结构的合理性、行走的稳定性和协调性等,应用了诸多数学理论进行验证,通过对小车的结构设计、运动仿真分析,提高了提出问题、分析问题、解决问题的能力,并总结出了从中获得的经验和教训,受益良多。
关键词:重力驱动小车,MATLAB/Simulink运动仿真,Inventor三维设计
Structure design and motion simulation analysis of gravitydrivencar
Author:SunYanning
Tutor:ShanQuan
Abstract
In this paper, the gravity drivencar convertsthe gravitational potential energy of the heavy block tothe kinetic energy of the carby pulleys, and controlsthedirectionof the left and right periodic steeringby the spatial crank rocker mechanism toavoid obstacles. The design of the transmission system and steering system’sstructureshould besimple, less transmission parts, andreducing the transmission loss of the car, so as to make the car farther and more stable.
Key words:Gravity driven car, MATLAB/Simulink motion simulation, Inventor 3D design1Fra bibliotek1.1
在党的第十八届五中全会中,习近平总书记提出了“创新、协调、绿色、开放、共享”的五大发展理念,并把创新作为引领“十三五时期”发展的第一动力。习近平总书记指出,创新是我们中华民族进步的灵魂,是我国繁荣发展的不竭源泉,同时也是中华民族最具特色的民族品质。全国大学生工程训练综合能力竞赛是由教育部发文组织举办的,以国内高校综合工程实训教学平台为基础,开展的公益性科技创新实践活动,其目的就是为了深化实验教育改革创新,提升大学生在工程实践中的创新意识、实践能力和团队合作的精神,从而促进创新人才的培养。第二、三、四届全国大学生工程训练综合能力竞赛都是以“重力驱动小车”为命题,只是在竞赛的内涵上进行了调整,从这个主题中我们可以看出很多东西,一方面反映了国家对创新能力培养的重视,另一方面也反映了国家对节能减排的重视,同时也为大学生创新能力的培养提供了良好的契机。
Intheprocessof vehicle design, payingattention to optimization of finite energy utilization, the rationality of the car body structure, walking the stability,harmonyandapplication of many mathematical theory was verified. Through the analysis of the car structure designand motion simulation, improvetheabilities offinding questions, analyzingproblems,solvingproblem.The experiences and lessonsaresummed up.
通过MATLAB平台,计算小车的运动轨迹,并得出小车运动轨迹路线图。通过MATLAB/Simulink中的SimMechanics工具箱建立小车转向机构的机构模型,并在SimMechanics环境下对自行小车的转向机构进行了运动学的动态仿真,同时进行了轨迹跟踪控制。
根据各部分结构方案,通过Inventor2015进行三维建模,并制作三维仿真动画,检验小车各运动部分是否有干涉,小车比例是否协调。