ESPRIT算法(最小二乘法)matlab程序
最小二乘法MATLAB程序及结果
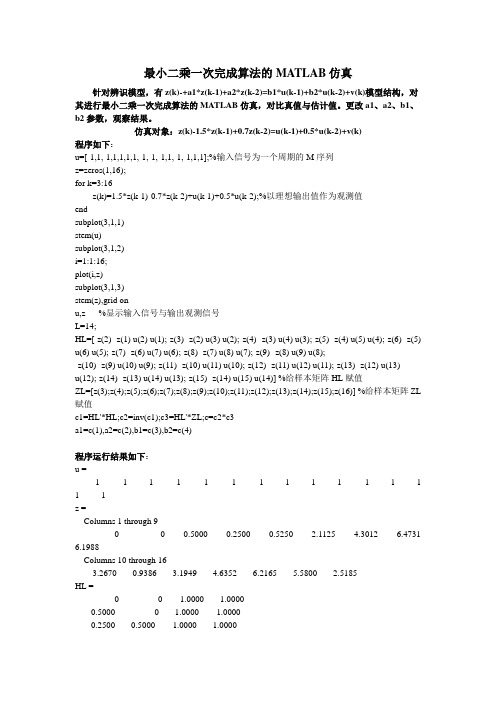
最小二乘一次完成算法的MATLAB仿真针对辨识模型,有z(k)-+a1*z(k-1)+a2*z(k-2)=b1*u(k-1)+b2*u(k-2)+v(k)模型结构,对其进行最小二乘一次完成算法的MATLAB仿真,对比真值与估计值。
更改a1、a2、b1、b2参数,观察结果。
仿真对象:z(k)-1.5*z(k-1)+0.7z(k-2)=u(k-1)+0.5*u(k-2)+v(k)程序如下:u=[-1,1,-1,1,1,1,1,-1,-1,-1,1,-1,-1,1,1];%输入信号为一个周期的M序列z=zeros(1,16);for k=3:16z(k)=1.5*z(k-1)-0.7*z(k-2)+u(k-1)+0.5*u(k-2);%以理想输出值作为观测值endsubplot(3,1,1)stem(u)subplot(3,1,2)i=1:1:16;plot(i,z)subplot(3,1,3)stem(z),grid onu,z %显示输入信号与输出观测信号L=14;HL=[-z(2) -z(1) u(2) u(1);-z(3) -z(2) u(3) u(2);-z(4) -z(3) u(4) u(3);-z(5) -z(4) u(5) u(4);-z(6) -z(5) u(6) u(5);-z(7) -z(6) u(7) u(6);-z(8) -z(7) u(8) u(7);-z(9) -z(8) u(9) u(8);-z(10) -z(9) u(10) u(9);-z(11) -z(10) u(11) u(10);-z(12) -z(11) u(12) u(11);-z(13) -z(12) u(13)u(12);-z(14) -z(13) u(14) u(13);-z(15) -z(14) u(15) u(14)] %给样本矩阵HL赋值ZL=[z(3);z(4);z(5);z(6);z(7);z(8);z(9);z(10);z(11);z(12);z(13);z(14);z(15);z(16)] %给样本矩阵ZL 赋值c1=HL'*HL;c2=inv(c1);c3=HL'*ZL;c=c2*c3a1=c(1),a2=c(2),b1=c(3),b2=c(4)程序运行结果如下:u =-1 1 -1 1 1 1 1 -1 -1 -1 1 -1 -1 1 1z =Columns 1 through 90 0 0.5000 0.2500 0.5250 2.1125 4.3012 6.4731 6.1988Columns 10 through 163.2670 -0.9386 -3.1949 -4.6352 -6.2165 -5.5800 -2.5185HL =0 0 1.0000 -1.0000-0.5000 0 -1.0000 1.0000-0.2500 -0.5000 1.0000 -1.0000-0.5250 -0.2500 1.0000 1.0000 -2.1125 -0.5250 1.0000 1.0000 -4.3012 -2.1125 1.0000 1.0000 -6.4731 -4.3012 -1.0000 1.0000-6.1988 -6.4731 -1.0000 -1.0000-3.2670 -6.1988 -1.0000 -1.00000.9386 -3.2670 1.0000 -1.00003.1949 0.9386 -1.0000 1.00004.6352 3.1949 -1.0000 -1.00006.2165 4.6352 1.0000 -1.00005.58006.2165 1.0000 1.0000 ZL =0.50000.25000.52502.11254.30126.47316.19883.2670-0.9386-3.1949-4.6352-6.2165-5.5800-2.5185c =-1.50000.70001.00000.5000a1 =-1.5000a2 =0.7000b1 =1.0000b2 =0.5000程序运行曲线:图.1 最小二乘一次完成算法仿真实例输入信号与输出观测值分析:从仿真结果知,由于所用的输出观测值没有任何噪声成分,所以辨识结果也无任何误差。
matlab最小二乘法
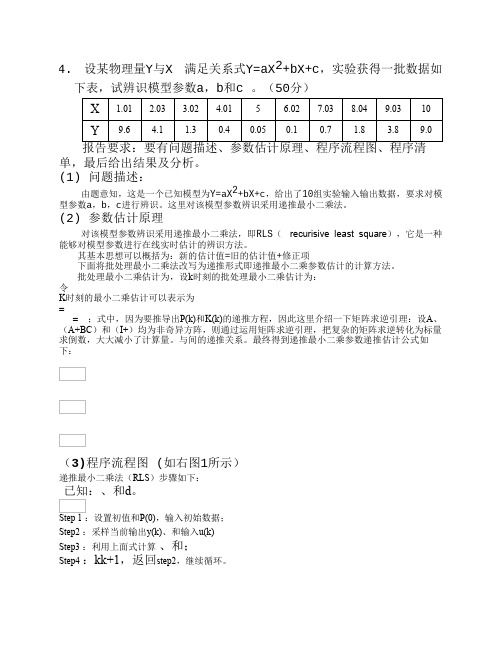
4. 设某物理量Y与X 满足关系式Y=aX2+bX+c,实验获得一批数据如下表,试辨识模型参数a,b和c 。
(50分)X 1.01 2.03 3.02 4.015 6.027.038.049.0310Y9.6 4.1 1.30.40.050.10.7 1.8 3.89.0单,最后给出结果及分析。
(1) 问题描述:由题意知,这是一个已知模型为Y=aX2+bX+c,给出了10组实验输入输出数据,要求对模型参数a,b,c进行辨识。
这里对该模型参数辨识采用递推最小二乘法。
(2) 参数估计原理对该模型参数辨识采用递推最小二乘法,即RLS(recurisive least square),它是一种能够对模型参数进行在线实时估计的辨识方法。
其基本思想可以概括为:新的估计值=旧的估计值+修正项下面将批处理最小二乘法改写为递推形式即递推最小二乘参数估计的计算方法。
批处理最小二乘估计为,设k时刻的批处理最小二乘估计为:令K时刻的最小二乘估计可以表示为==;式中,因为要推导出P(k)和K(k)的递推方程,因此这里介绍一下矩阵求逆引理:设A、(A+BC)和(I+)均为非奇异方阵,则通过运用矩阵求逆引理,把复杂的矩阵求逆转化为标量求倒数,大大减小了计算量。
与间的递推关系。
最终得到递推最小二乘参数递推估计公式如下:(3)程序流程图 (如右图1所示)递推最小二乘法(RLS)步骤如下:已知:、和d。
Step 1 :设置初值和P(0),输入初始数据;Step2 :采样当前输出y(k)、和输入u(k)Step3 :利用上面式计算、和;Step4 :kk+1,返回step2,继续循环。
图1 程序流程图(4) Matlab仿真程序、输出参数估计值、参数估计变化轨迹图像、结果分析仿真程序如下:X=[1.01 2.03 3.02 4.01 5 6.02 7.03 8.04 9.03 10]; Y=[9.6 4.1 1.3 0.4 0.05 0.1 0.7 1.8 3.8 9.0];%实验输入数据、实验输出数据syms a b c % 定义待辨识参数theta=[a;b;c]; %theta包含待辨识参数a,b,ctheta1=zeros(3,1); %对象参数初始化P=10^6*eye(3) %构造初始P阵for k=1:10 %仿真步长范围1到10phi=[X(k)*X(k);X(k);1];%y=aX*X+bX+c=phi'*theta%theta=[a;b;c];phi=[X(k)*X(k);X(k);1]K=P*phi/(1+phi'*P*phi); %递推最小二乘法K阵的递推公式theta=theta1+K*(Y(k)-phi'*theta1); %theta的递推公式P=(eye(3)-K*phi')*P; %递推最小二乘法P阵的递推公式theta1=theta; %theta的最终估计向量theta2(:,k)=theta; %theta估计向量矩阵化,目的是为了%下面的plot仿真图像输出endtheta1 %输出参数估计值plot([1:10],theta2) %输出参数逐步递推估计的轨迹图像xlabel('k'); %设置横坐标为步长kylabel('参数估计a,b,c'); %纵坐标为估计参数a,b,c legend('a','b','c'); %标示相应曲线对应的参数axis([1 10 -10 20]); %设置坐标轴范围P =1000000 0 00 1000000 00 0 1000000输出参数估计值、参数估计变化轨迹图像:theta1 =0.4575-5.073413.3711图 2 参数估计逐步变化轨迹图像结果分析:通过matlab仿真可知,由递推最小二乘法辨识到的参数为:a=0.4575;b=-5.0734;c=13.3711所以Y=0.4575-5.0734X+13.3711 。
matlab最小二乘解方程
matlab最小二乘解方程最小二乘法是求解线性方程组的一种有效方法,可以通过最小化误差平方和来得到最优解。
在MATLAB中,我们可以使用“\”操作符或者使用“pinv”函数来求解一个线性方程组的最小二乘解。
以下是关于如何在MATLAB中使用最小二乘法来求解线性方程组的详细内容:1. 使用“\”操作符使用“\”操作符可以很方便地求解一个线性方程组的最小二乘解。
例如,假设我们有一个由n个方程组成的线性方程组:Ax = b其中,A是一个m ×n的矩阵,x是一个n维向量,b是一个m维向量。
则它的最小二乘解为:x = (A' A)^(-1) A' b在MATLAB中,我们可以通过以下代码实现最小二乘解:A = [1 1 1; 2 3 4; 4 5 7; 5 6 8];b = [1; 2; 3; 4];x = A \ b;其中,反斜杠符号“\”表示求解线性方程组的最小二乘解。
2. 使用“pinv”函数除了使用“\”操作符,我们也可以使用MATLAB中的“pinv”函数来求解一个线性方程组的最小二乘解。
例如,我们可以通过以下代码实现最小二乘解:A = [1 1 1; 2 3 4; 4 5 7; 5 6 8];b = [1; 2; 3; 4];x = pinv(A) * b;其中,pinv函数表示求矩阵A的伪逆矩阵。
使用“pinv”函数来求解线性方程组的最小二乘解与使用“\”操作符的结果是等价的。
需要注意的是,在使用最小二乘法来求解线性方程组时,矩阵A的列应该是线性无关的,否则可能会出现唯一最小二乘解不存在的情况。
综上所述,MATLAB中使用最小二乘法来求解线性方程组非常简单。
我们可以通过“\”操作符或者“pinv”函数来求解一个线性方程组的最小二乘解。
最小二乘法、最佳均方逼近、随机拟合及其MATLAB程序
2曲线拟合的线性最小二乘法及其MATLAB?序例2给出一组数据点(X i, y i)列入表2中,试用线性最小二乘法求拟合曲线, 估计其误差,作出拟合曲线•解 (1)在MATLAB工作窗口输入程序>> x=[-2.5 -1.7 -1.1 -0.8 0 0.1 1.5 2.7 3.6];y=[-192.9 -85.50 -36.15 -26.52 -9.10 -8.43 -13.126.50 68.04];plot(x,y , 'r*'),lege nd( '实验数据(xi,yi)' )xlabel( 'x' ), ylabel( 'y'),title( '数据点(xi,yi) 的散点图’)运行后屏幕显示数据的散点图(略)(3)编写下列MATLAB程序计算f(x)在(X j,yj处的函数值,即输入程序>> syms al a2 a3 a4x=[-2.5 -1.7 -1.1 -0.8 0 0.1 1.5 2.7 3.6];fi=a1.*x.A3+ a2.*x.A2+ a3.*x+ a4运行后屏幕显示关于a1,a2, a3和a4的线性方程组fi =[ -125/8*a1+25/4*a2-5/2*a3+a4,-4913/1000*a1+289/100*a2-17/10*a3+a4,-1331/1000*a1+121/100*a2-11/10*a3+a4, -64/125*a1+16/25*a2-4/5*a3+a4,a4, 1/1000*a1+1/100*a2+1/10*a3+a4,27/8*a1+9/4*a2+3/2*a3+a4,19683/1000*a1+729/100*a2+27/10*a3+a4, 5832/125*a1+324/25*a2+18/5*a3+a4]编写构造误差平方和的MATLAB程序>> y=[-192.9 -85.50 -36.15 -26.52 -9.10 -8.43 -13.12 6.50 68.04];fi=[-125/8*a1+25/4*a2-5/2*a3+a4, -4913/1000*a1+289/100*a2-17/10*a3+a4, -1331/1000*a1+121/100*a2-11/10*a3+a4,-64/125*a1+16/25*a2-4/5*a3+a4, a4,1/1000*a1+1/100*a2+1/10*a3+a4,27/8*a1+9/4*a2+3/2*a3+a4,19683/1000*a1+729/100*a2+27/10*a3+a4,5832/125*a1+324/25*a2+18/5*a3+a4];fy=fi-y; fy2=fy.A2; J=sum(fy.A2)运行后屏幕显示误差平方和如下J=(-125/8*a1+25/4*a2-5/2*a3+a4+1929/10)A2+(-4913/1000*a1+289/100*a2-17/10*a3+a4+171/2)A2+(-1331/1000*a1+121/100*a2-11/10*a3+a4+723/20F2+(-64/125*a1+16/25*a2-4/5*a3+a4+663/25F2+(a4+91/10F2+(1/1000*a1+1/100*a2+1/10*a3+a4+843/100)A2+(27/8*a1+9/4*a2+3/2*a3+a4+328/25)A2+(19683/1000 *a1+729/100*a2+27/10*a3+a4-13/2F2+(5832/125*a1+324/25*a2 +18/5*a3+a4-1701/25F2为求31,32,33,34使J达到最小,只需利用极值的必要条件-丄 0 a k (k 1,2,3,4),得到关于31,32,33,34的线性方程组,这可以由下面的MATLAB程序完成,即输入程序>> syms a1 a2 a3 a4 J=(-125/8*a1+25/4*32-5/2*a3+34+1929/10)A2+(-4913/1000*a1+289/100*32-17/10*33+34...+171/2)A2+(-1331/1000*a1+1 21/100*a2-11/10*a3+34+723/20)A2+(-64/125*31+16/25*32-4/5*a3+34+663/25)A2+(34+91/10)A2+(1/1000*31+1/100*32+1/10*a3+a4+843/100)A2+(27/8*31+9/4*32+3/2*a3+34+328/25)A2+(19683/ 1000*a1+729/100*32+27/10*a3+34-13/2)A2+(5832/125*31+324/2 5*a2+18/5*a3+a4-1701/25)A2;Ja1=diff(J,a1); Ja2=diff(J,a2); Ja3=diff(J,a3);Ja4=diff(J,a4);Ja11=simple(Ja1), Ja21=simple(Ja2), Ja31=simple(Ja3),Ja41=simple(Ja4),运行后屏幕显示J分别对31, 32 ,33 ,34的偏导数如下Ja1仁56918107/10000*31+32097579/25000*32+1377283/2500*33+23667/250*34-8442429/625J321 =32097579/25000*31+1377283/2500*32+23667/250*33 +67*34+767319/625 J331 = 1377283/2500*31+23667/250*32+67*33+18/5*34-232638/125J341 = 23667/250*31+67*32+18/5*33+18*34+14859/25解线性方程组J311 =0,J321 =0,J331 =0,J341 =0,输入下列程序>>A=[56918107/10000, 32097579/25000, 1377283/2500,23667/250; 32097579/25000, 1377283/2500, 23667/250, 67; 1377283/2500, 23667/250, 67, 18/5; 23667/250, 67, 18/5, 18];B=[8442429/625, -767319/625, 232638/125, -14859/25];C=B/A, f=poly2sym(C)运行后屏幕显示拟合函数f及其系数C如下C = 5.0911 -14.1905 6.4102 -8.2574f=716503695845759/140737488355328*xA3-7988544102557579/562949953421312*xA2+1804307491277693/281474976710656*x -4648521160813215/562949953421312 故所求的拟合曲线为f (x) 5.0911 x314.1905 x2 6.4102 x 8.2574 .(4)编写下面的MATLAB 程序估计其误差,并作出拟合曲线和数据的图形.输入程序>> xi=[-2.5 -1.7 -1.1 -0.8 0 0.1 1.5 2.7 3.6]; y=[-192.9 -85.50 -36.15 -26.52 -9.10 -8.43 -13.12 6.50 68.04]; n=length(xi);f=5.0911.*xi.A3-14.1905.*xi.A2+6.4102.*xi -8.2574;x=-2.5:0.01: 3.6;F=5.0911.*x.A3-14.1905.*x.A2+6.4102.*x -8.2574;fy=abs(f-y); fy2=fy.A2; Ew=max(fy),E1=sum(fy)/n, E2=sqrt((sum(fy2))/n) plot(xi,y,'r*'), hold on, plot(x,F, 'b-'),hold off legend('数据点(xi,yi)','拟合曲线y=f(x)'),xlabel('x'), ylabel('y'),title(例2的数据点(xi,yi)和拟合曲线y=f(x)的图形')运行后屏幕显示数据(X i,yj与拟合函数f的最大误差平均误差E i和均方根误差E2及其数据点(X j,yj和拟合曲线y=f(x)的图形(略).Ew = E1 = E2 =3.105 4 0.903 4 1.240 96函数逼近及其MATLAB?序最佳均方逼近的MATLAB^程序function [yy1,a,WE]=zjjfbj(f,X,Y,xx) m=size(f);n=length(X);m=m(1);b=zeros(m,m); c=zeros(m,1);if n~=length(Y) error( 'X和丫的维数应该相同') end for j=1:m for k=1:mb(j,k)=0;for i=1:nb(j,k)=b(j,k)+feval(f(j,:),X(i))*feval(f(k,:),X(i));endendc(j)=0;for i=1:nc(j)=c(j)+feval(f(j,:),X(i))*Y(i);endenda=b\c;WE=0;for i=1:nff=0;for j=1:m ff=ff+a(j)*feval(f(j,:),X(i)); endWE=WE+(Y(i)-ff)*(Y(i)-ff);endif nargin==3return ;endyy=[];for i=1:ml=[];for j=1:length(xx) l=[l,feval(f(i,:),xx(j))]; end yy=[yy l'];endyy=yy*a; yy1=yy'; a=a';WE;例6. 1对数据X和Y,用函数y 1,y x, y x2进行逼近,用所得到的逼近函数计算在x 6.5处的函数值,并估计误差.其中X=(1 3 4 5 6 7 8 9); Y=(-11 -13 -11 -7 -1 7 17 29). 解在MATLA工作窗口输入程序>> X=[ 1 3 4 5 6 7 8 9]; Y=[-11 -13 -11 -7 -17 17 29];f=['fun0';'fun1';'fun2'];[yy,a,WE]=zjjfbj(f,X,Y,6.5) 运行后屏幕显示如下yy =2.75000000000003a =-7.00000000000010 -4.999999999999951.00000000000000WE =7.172323350269439e-027例 6.2 对数据X 和丫,用函数 y 1, y x, y x2,y cosx,y e x,y sinx进行逼近,其中X=(0 0.50 1.00 1.50 2.00 2.50 3.00 ),丫=(0 0.47940.8415 0.9815 0.9126 0.5985 0.1645 ) .解在MATLA工作窗口输入程序>> X=[ 0 0.50 1.00 1.50 2.00 2.50 3.00];丫=[0 0.4794 0.8415 0.9815 0.9126 0.1645];f=['fun0';'fun1';'fun2';'fun3';'fun4';'fun5'];xx=0:0.2:3;[yy,a,WE]=zjjfbj(f,X,Y,plot(X,Y,'ro',xx,yy,'b-')运行后屏幕显示如下(图略)yy = Columns 1 through 7-0.0005 0.2037 0.3939 0.5656 0.8348 0.9236Columns 8 through 140.9771 0.9926 0.9691 0.9069 0.6766 0.5191Columns 15 through 160.3444 0.1642 0.5985xx), 0.7141 0.8080a = 0.3828 0.4070 -0.3901 0.0765 -0.4598 0.5653 WE = 1.5769e-004 即,最佳逼近函数为y=0.3828+0.4070*x-0.3901*xA2+0.0765*exp(x) +0.5653*sin(x) .8随机数据点上的二元拟合及其MATLA 程序例 8 设节点 ( X,Y,Z ) 中的 X 和 Y 分别是在区间 [ 3,3] 和 [ 2.5,3.5]上的 5022个 随 机 数 , Z 是 函 数 Z=7-3 x 3e -x2 -y2 在 (X,Y ) 的 值 , 拟 合 点 ( X I ,Y I ) 中的 X I =-3:0.2:3, Y I =-2.5:0.2:3.5. 分别用二元拟合方法中最近邻内插法、三 角基线性内插法、三角基三次内插法和 MATLAB4 网格化坐标方法计算在 ( X I ,Y I ) 处的值,作出它们的图形,并与被拟和曲面进行比较 .解 (1 )最近邻内插法 .输入程序>> x=rand(50,1); y=rand(50,1); %生成50个一元均匀分布随机数x 和y , x , y .X=-3+(3-(-3))*x; %利用x 生成的随机变量.title( ' 用最近邻内插法拟合函数 z =7-3 xA3 exp(-xA2 - yA2) 的曲面和节点的图形 ' )%legend( ' 拟合曲面 ',' 节点 (xi,yi,zi)' )hold on%在当前图形上添加新图形面及其插值乙(略).(2)三角基线性内插法 输入程序>> x=rand(50,1); y=rand(50,1); %生成50个一元均匀分布随机数x 和y , x ,y .X=-3+(3-(-3))*x; %利用x 生成 上的随机变量.Y=-2.5+(3.5-(-2.5))*y;%利用 y 生成 上的随机变量 .Z=7-3* X.A3 .* exp(-X.A2 - Y.A2);%在每个随机点( X,Y )处计算Z 的值.-0.4598*cos(x)Y=-2.5+(3.5-(-2.5))*y;Z=7-3* X.A3 .* exp(-X.A2 - Y.A2);处计算Z 的值.X1=-3:0.2:3; Y1=-2.5:0.2:3.5;[XI,YI] = meshgrid(X1,Y1); ZI=griddata(X,Y,Z,XI,YI, (XI,YI )处的插值 ZI.mesh(XI,YI, ZI)xlabel( 'x' ), ylabel( 'y'%利用 y 生成的随机变量 .%在每个随机点( X,Y )%将坐标( XI,YI )网格化 .'nearest' ) %计算在每个插值点 %作二元拟合图形 . ), zlabel( 'z' ),plot3(X,Y,Z, 'bo' ) (X,Y,Z). hold of 运行后屏幕显示用最近邻内插法拟合函数%用兰色小圆圈画出每个节点 %结束在当前图形上添加新图形 .22Z=7-3 x 3e-x2 -y2在两组不同节点处的曲X1=-3:0.2:3;title('用三角基线性内插法拟合函数z =7-3 x A3 exp(-x A2 -y A2)的曲面和节点的图形’) %legend( ' 拟合曲面',' hold on plot3(X,Y,Z, 'bo' ) (X,Y,Z). hold of22运行后屏幕显示用三角基线性内插法拟合函数Z=7-3 x 3e-x -y在两组不同节点处的曲面和节点的图形及其插值 乙(略).(3)三角基三次内插法 . 输入程序>> x=rand(50,1); y=rand(50,1); %生成50个一元均匀分布随机数x 和y , x ,y .title( ' 用三角基三次内插法拟合函数 z =7-3 xA3 exp(-xA2 -22运行后屏幕显示用三角基三次内插法拟合函数 Z=7-3 x 3e -x -y 在两组不同节点处的曲面和节点的图形及其插值 Z I (略).( 4 ) MATLAB 4网格化坐标方法 . 输入程序>> x=rand(50,1); y=rand(50,1); %生成50个一元均匀分布随机数x 和y , x ,y .X=-3+(3-(-3))*x;%利用x 生成 上的随机变量.Y1=-2.5:0.2:3.5;[XI,YI] = meshgrid(X1,Y1); ZI=griddata(X,Y,Z,XI,YI,XI,YI )处的插值 ZI.mesh(XI,YI, ZI)xlabel( 'x' ), ylabel( 'y%将坐标( XI,YI )网格化 .'linear' ) %计算在每个插值点 %作二元拟合图形 . ), zlabel( 'z' ),节点 (xi,yi,zi)' )%在当前图形上添加新图形 .%用兰色小圆圈画出每个节点 %结束在当前图形上添加新图形 . X=-3+(3-(-3))*x; %利用x 生成上的随机变量.Y=-2.5+(3.5-(-2.5))*y;Z=7-3* X.A3 .* exp(-X.A2 - Y.A2);处计算Z 的值.X1=-3:0.2:3; Y1=-2.5:0.2:3.5;[XI,YI] = meshgrid(X1,Y1); ZI=griddata(X,Y,Z,XI,YI,( XI,YI )处的插值 ZI.mesh(XI,YI, ZI) xlabel( 'x' ), ylabel( 'y'%利用y 生成上的随机变量•%在每个随机点( X,Y )%将坐标( XI,YI )网格化 .'cubic' ) %计算在每个插值点 %作二元拟合图形 . ), zlabel( 'z' ),yA2) 的曲面和节点的图形 ' )%legend( ' 拟合曲面','hold on 节点 (xi,yi,zi)' )%在当前图形上添加新图形plot3(X,Y,Z,'bo' ) (X,Y,Z).hold of%用兰色小圆圈画出每个节点%结束在当前图形上添加新图形 .22运行后屏幕显示用MATLAB 网格化坐标方法拟合函数Z=7-3 x 3e -x-y 在两组不同 节点处的曲面和节点的图形及其插值 ZI (略).22(5) 作被拟合曲面Z=7-3x 3e -x-y 和节点的图形. 输入程序>> x=ra nd(50,1); y=rand(50,1); %生成50个一元均匀分布随机数x 和y , x ,y .X=-3+(3-(-3))*x; %利用x 生成随机变量.Y=-2.5+(3.5-(-2.5))*y;%利用y 生成随机变量.Z=7-3* X.A3 .* exp(-X.A2 - Y.A2);%在每个随机点( X,Y )处计算Z 的值.X1=-3.:0.1:3.;Y1=-2.5:0.1:3.5;[XI,YI] = meshgrid(X1,Y1);%将坐标( XI,YI )网格化 .ZI=7-3* XI.A3 .* exp(-XI.A2 - YI.A2); mesh(XI,YI, ZI) %作二元拟合图形 .xlabel( 'x'), ylabel('y' ), zlabel( 'z' ),title( ' 被拟合函数 z =7-3 xA3 exp(-xA2 - yA2) 的曲面和节点的图形 ' )%legend('被拟合函数曲面','节点(xi,yi,zi)' )hold on%在当前图形上添加新图形 .plot3(X,Y,Z, 'bo' )%用兰色小圆圈画出每个节点 (X,Y,Z).hold of%结束在当前图形上添加新图形 .22运行后屏幕显示被拟合函数 Z=7-3 x 3e -x-y 的曲面和节点的图形及其函数值 ZI(略) .Y=-2.5+(3.5-(-2.5))*y;Z=7-3* X.A3 .* exp(-X.A2 - Y.A2);处计算Z 的值.X1=-3:0.2:3; Y1=-2.5:0.2:3.5; [XI,YI] = meshgrid(X1,Y1); ZI=griddata(X,Y,Z,XI,YI, (XI,YI )处的插值 ZI.mesh(XI,YI, ZI) xlabel( 'x' ), ylabel( 'y' %利用y 生成上的随机变量.%在每个随机点( X,Y )'v4'%将坐标( XI,YI )网格化 . ) %计算在每个插值点%作二元拟合图形 . ), zlabel( 'z' ),' 用 MATLAB 4 网格化坐标方法 拟合函数 z =7-3 xA3 的曲面和节点的图形 ' )%legend( ' 拟合曲面 ',' 节点 (xi,yi,zi)' ) hold on %在当前图形上添加新图形 . plot3(X,Y,Z, 'bo' ) %用兰色小圆圈画出每个节点(X,Y,Z).hold oftitle(exp(-x A2 - y A2)'bo' ) %结束在当前图形上添加新图形 .。
最小二乘法matlab程序

最小二乘法matlab程序最小二乘法是一种统计模型,它可以被用来拟合一元函数数据,或者拟合非线性曲线。
它的基本思想是找到一组参数,使得拟合的曲线与实际数据的差距最小。
本文将介绍如何使用Matlab实现一个最小二乘法的程序,并与现有的一些现成的最小二乘法的matlab程序进行比较,找出其优缺点。
首先,要使用最小二乘法拟合曲线,需要准备一组输入数据,一般可以将其表示为两个向量,分别是自变量x和因变量y。
这些数据可以是由测量和实验得到的,也可以是由人工输入的,但无论如何都要确保它们的准确性。
接下来,就可以使用Matlab输入数据进行处理,用最小二乘法计算出最拟合的曲线及其参数。
具体步骤主要分为三步:第一步是计算输入数据的均值和方差,包括自变量x和因变量y的均值和方差;第二步是计算自变量x和因变量y的关系,即最小二乘拟合曲线的系数;第三步是验证拟合的曲线的准确性,如果不满意,可以重新调整参数,以获得较好的拟合效果。
此外,Matlab除了提供自带的最小二乘法函数外,还支持第三方开发者开发现成的matlab程序,用于解决最小二乘法的问题。
这些程序中有一些是开源的,另一些则是出售的。
其中开源的有LEAST,CURVEFIT,CURVEFITTOOL等,而出售的有MATLAB Curve Fitting Toolbox,Optimization Toolbox和Statistics Toolbox等。
它们的突出特点是速度快,代码简洁,容易上手,适用于多种拟合类型。
然而,各种matlab程序也有自身的缺点,最明显的就是当输入数据非常庞大时,它们的计算能力就无法跟上,速度就会变慢。
此外,使用出售的matlab程序可能相对昂贵,而且有时需要安装某些复杂的库文件,这也是一种麻烦。
因此,使用最小二乘法拟合曲线时,可以参考现有的matlab程序,也可以自己编写matlab代码,同时要考虑到程序的可靠性、效率和可行性。
本文介绍的matlab程序的最大优势是它不需要依赖第三方的软件,而且能够满足大多数用户的需求,使得最小二乘法可以在短时间内被成功运用。
matlab最小二乘法拟合直线

matlab最小二乘法拟合直线【导言】直线拟合是数据分析和数学建模中常用的方法之一,而最小二乘法则是在直线拟合中最常用的方法之一。
在本文中,将介绍使用Matlab进行最小二乘法拟合直线的步骤和原理,并就此主题进行深入的探讨。
【正文】一、最小二乘法简介最小二乘法是一种数学优化方法,它通过最小化误差的平方和来寻找函数与观测数据之间的最佳拟合。
在直线拟合中,最小二乘法的目标是找到一条直线,使得所有观测数据点到直线的距离之和最小。
1. 确定拟合的模型在直线拟合中,我们的模型可以表示为:Y = a*X + b,其中a和b为待求参数,X为自变量,Y为因变量。
2. 计算误差对于每一个观测数据点(x_i, y_i),计算其到直线的垂直距离d_i,即误差。
误差可以表示为:d_i = y_i - (a*x_i + b)。
3. 求解最小二乘法问题最小二乘法的目标是最小化所有观测数据点到直线的距离之和,即最小化误差的平方和:min Σ(d_i^2) = min Σ(y_i - (a*x_i + b))^2。
通过求解该最小化问题,可以得到最佳拟合的直线斜率a和截距b的值。
二、Matlab实现最小二乘法拟合直线的步骤下面将介绍使用Matlab进行最小二乘法拟合直线的基本步骤。
1. 导入数据需要将实验数据导入Matlab。
可以使用matlab自带的readtable函数从文件中读取数据,也可以使用xlsread函数直接从Excel文件中读取数据。
2. 数据预处理在进行最小二乘法拟合直线之前,先对数据进行预处理。
一般情况下,可以对数据进行去除异常值、归一化等操作,以确保数据的准确性和可靠性。
3. 拟合直线使用Matlab的polyfit函数可以实现直线拟合。
polyfit函数可以拟合输入数据的曲线或平面,并返回拟合参数。
在拟合直线时,需要指定拟合的阶数,对于直线拟合,阶数为1。
4. 绘制拟合直线使用Matlab的plot函数可以将拟合的直线绘制出来,以便于观察拟合效果。
matlab 最小二乘拟合直线并输出直线方程

在Matlab中,最小二乘法是一种常见的数学拟合技术,可以用来拟合直线,曲线甚至更复杂的函数。
通过最小二乘法,可以找到最适合数据点的直线方程,从而能够更好地分析和预测数据之间的关系。
在本文中,我将详细介绍如何在Matlab中使用最小二乘法来拟合直线,并输出直线方程。
我们需要准备一组数据点。
假设我们有一组横坐标和纵坐标的数据点,分别用变量x和y表示。
接下来,我们可以使用Matlab中的polyfit函数来进行最小二乘拟合。
该函数的语法如下:```matlabp = polyfit(x, y, 1);```其中,x和y分别代表数据点的横坐标和纵坐标,而1代表要拟合的直线的次数,即一次函数。
执行该语句后,变量p将会存储拟合出的直线的系数,即直线方程y = ax + b中的a和b。
在接下来的内容中,我将详细讨论如何通过最小二乘法拟合直线,并输出直线方程。
具体而言,我们将从如何准备数据、使用polyfit函数进行拟合、得到直线方程以及如何应用和解释直线拟合结果等方面进行全面分析。
一、数据准备在使用最小二乘法拟合直线之前,首先要准备一组数据点。
这些数据点应该是具有一定规律性的,从而能够通过直线拟合来揭示数据之间的关系。
在这一部分,我将详细介绍如何准备数据,并重点关注数据的合理性和可靠性。
1.1 数据收集要拟合直线,首先需要收集一组数据点。
这些数据点可以来源于实验观测、实际测量或者模拟计算等方式。
在收集数据时,需要保证数据的准确性和完整性。
还需要考虑数据的分布范围和密度,以便更好地反映数据之间的关系。
1.2 数据预处理在拟合直线之前,通常需要对数据进行一定的预处理。
这可能包括去除异常值、处理缺失数据,甚至进行数据变换等操作。
在这一步中,我将介绍如何进行数据预处理,并强调预处理对最终拟合结果的影响。
二、最小二乘拟合当数据准备工作完成后,就可以使用polyfit函数进行最小二乘拟合了。
在这一部分,我将详细介绍polyfit函数的使用方法,并解释其背后的数学原理。
最小二乘法圆拟合及matlab程序

X i2 Yi2 +aX i bYi c
3
令Q(a,b,c)为
的平方和:
i
Q(a, b, c) i2 [( Xi2 Yi2 aXi bYi c)]2
下面求参数a,b,c使得Q(a,b,c)的值最小即可
4
F(a,b,c)对a,b,c求偏导,令偏导等于0,得到极值点,比较所有极值点的函 数值即可得到最小值。
② × N- ③ × Yi
且令 C (N Xi2 Xi Xi )
D (N XiYi Xi Yi )
E N
X
3 i
N
X iYi2
( X i2 Yi2 )
Xi
G (N Yi2 Yi Yi )
H N Yi3 N Xi2Yi ( X i2 Yi2 ) Yi
最小二乘法拟合圆曲线: R2 (x A)2 ( y B)2
R2 x2 2Ax A2 y2 2By B2
令a=-2A,b=-2B, c A2 B2 R2
则:圆的另一形式为:
x2 y2 ax by c 0
1
只需求出参数a,b,c即可以求的圆半径参数:
a A
2
B a 2
Q(a,b, c)
a
2( X i2 Yi2 aX i bYi c) X i 0
①
Q(a,b, c)
b
2( X i2 Yi2 aX i bYi c)Yi 0 ②
Q(a,b, c)
c
2( X i2 Yi2 aX i bYi c) 0 ③
5
由 ① × N- ③ × Xi
9
6
解得: Ca+Db+E=0
Da+Gb+H=0
a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
%基本ESPRIT算法,第二种方法最小二乘法
clear all;close all;clc;
c=3*10^8;
f=3*10^9;
%% 求得信号的波长
lamda=c/f;
%%阵元的间距
d=lamda/2;
%% (n-1)为子阵列的个数即阵元数
n=10;
%% 信号的数目
signal_number=3;
%% 三个信号的角度值
thita1=-25;
thita2=30;
thita3=65;
%% 三个信号的中心频率
f1=40;
f2=20;
f3=70;
%% 在时域来说,是快拍数(一段时间内对阵列数据采样的个数);在频域来说,是DFT的时间子段的个数。
snapshot=1:2000;
%% S是信号空间,有三个信号组成
S1=2.72*exp(j*2*pi*f1*snapshot/length(snapshot));
S2=4.48*exp(j*2*pi*f2*snapshot/length(snapshot));
S3=7.37*exp(j*2*pi*f3*snapshot/length(snapshot));
S=[S1;S2;S3];
%% 子阵1
A1=exp(-j*2*pi*d*[0:n-1]*sin(thita1*pi/180)/lamda).';
A2=exp(-j*2*pi*d*[0:n-1]*sin(thita2*pi/180)/lamda).';
A3=exp(-j*2*pi*d*[0:n-1]*sin(thita3*pi/180)/lamda).';
A=[A1,A2,A3];
%% 噪声假设为高斯白噪声,均值为零的
N= wgn(10,2000,3);
%% 求信噪比的S1,S2,S3信噪比依次是10 20 30
s_power1=10*log(2.72^2/2);
s_power2=10*log(4.48^2/2);
s_power3=10*log(7.37^2/2);
snr1=s_power1-3;
snr2=s_power2-3;
snr3=s_power3-3;
%% 整个阵列接收到的数据0-n-1为阵列1;1-n为阵列2的
X=A*S+N;
%% 协方差矩阵
Rxx=X*X'/length(snapshot);
%% 对整个数据的协方差矩阵进行特征分解,从而得到特征值向量D和特征向量V
[V,D]=eig(Rxx);
%[Y,I]=sort(diag(D));
Us=V(:,n-signal_number+1:n);
%% 两个方阵张成的两个子空间
U1=Us(1:n-1,:);
U2=Us(2:n,:);
%% 利用最小二乘法求得旋转不变关系矩阵,然后进行特征分解
[p,q]=eig(inv(U1'*U1)*U1'*U2); %张贤达《矩阵分析与应用》第528页%% 利用上面求得的矩阵来获得角度
for i=1:signal_number;
alpha(i)=real(asin(-j*(log(q(i,i)))*lamda/(-2*pi*d))*180/pi);
end;
%% 作图
stem(alpha,ones(1,signal_number),'r--');grid;
axis([-90 90 0 2]);
text(alpha(1)-4,1.1,num2str(alpha(1)));text(alpha(1)-15,1.4,'信号1,信噪比为10'); text(alpha(2)-4,1.1,num2str(alpha(2)));text(alpha(2)-15,1.4,'信号2,信噪比为20'); text(alpha(3)-4,1.1,num2str(alpha(3)));text(alpha(3)-15,1.4,'信号3,信噪比为30'); ylabel('DOA估计的角度值');
xlabel('角度');
title('ESPRIT算法DOA估计');。