M序列辨识 Matlab程序 系统辨识
利用Matlab进行系统辨识的基本步骤
利用Matlab进行系统辨识的基本步骤系统辨识是在工程领域中广泛应用的一项技术,它可以通过实验数据来推断系统的特性和行为。
Matlab作为一种强大的数值计算与数据可视化软件,在系统辨识领域也扮演着重要的角色。
本文将介绍利用Matlab进行系统辨识的基本步骤,以帮助读者更好地了解和应用这一技术。
系统辨识的基本步骤可以分为数据采集、预处理、模型选择、参数估计和模型评估五个阶段。
下面将依次介绍每个阶段的具体步骤。
一、数据采集数据采集是系统辨识中至关重要的一步,它需要准备好合适的实验设备,并进行数据记录。
在Matlab中,可以利用数据采集卡或传感器等设备进行数据采集。
一般来说,需要采集输入信号和输出响应信号。
二、预处理预处理是为了提高辨识结果的准确性而对采集到的数据进行处理。
首先要检查数据是否存在异常值或噪声,如果有则进行滤波处理。
另外,还可以进行数据归一化、降采样和数值平滑等处理,以适应不同的辨识方法。
三、模型选择模型选择是在系统辨识过程中非常关键的一步。
在Matlab中,可以选择多种模型结构进行辨识,包括线性模型、非线性模型、时变模型和非参数模型等。
选择合适的模型结构要根据具体问题的要求和实际情况进行综合考量。
四、参数估计参数估计是确定系统辨识结果的过程,它可以通过最小二乘法或极大似然法等统计方法来估计模型的参数。
在Matlab中,可以使用现成的函数或自定义算法进行参数估计。
参数估计的结果可以用来表示系统的传递函数、状态空间模型或差分方程等。
五、模型评估模型评估是对辨识结果进行验证和优化的过程。
在Matlab中,可以利用辨识误差、残差分析和模型预测误差等指标来评估模型的质量。
如果评估结果不理想,还可以尝试调整模型结构或参数估计方法,进行迭代优化。
在实际应用中,系统辨识常常涉及到复杂的数学理论和算法。
Matlab作为一种集成了各类工具箱和函数的软件,可以大大简化系统辨识的步骤,提高辨识的效率和准确性。
利用Matlab进行系统辨识的技术方法

利用Matlab进行系统辨识的技术方法一、引言系统辨识是研究系统动态特性的一个重要方法,它广泛应用于控制系统、信号处理、通信等领域。
利用Matlab进行系统辨识能够实现快速、准确的模型建立和参数估计。
本文将介绍在Matlab环境下常用的系统辨识技术方法及其应用。
二、系统辨识的基本概念系统辨识是通过对系统的输入和输出信号进行观测和分析,以推断系统的结构和参数。
一般来说,系统辨识包括建立数学模型、估计系统参数和进行模型验证三个步骤。
1. 建立数学模型建立数学模型是系统辨识的第一步,它是描述系统行为的数学表达式。
常用的数学模型包括线性模型、非线性模型和时变模型等。
2. 估计系统参数在建立了数学模型之后,需要通过对实验数据的分析,估计出系统的参数。
参数估计可以通过最小二乘法、极大似然估计法等方法实现。
3. 模型验证模型验证是为了确定估计得到的系统模型是否准确。
常用的方法有经验验证、残差分析、模型检验等。
三、常用的系统辨识技术方法1. 线性参数模型线性参数模型是最常用的系统辨识方法之一。
它假设系统具有线性特性,并通过估计线性模型的参数来描述系统。
在Matlab中,可以使用函数"arx"进行线性参数模型的辨识。
2. 神经网络模型神经网络模型是一种非线性模型,它通过人工神经元的连接权值来描述系统行为。
在Matlab中,可以使用"nlarx"函数进行神经网络模型的辨识。
3. 系统辨识工具箱Matlab提供了丰富的系统辨识工具箱,包括System Identification Toolbox和Neural Network Toolbox等。
这些工具箱提供了各种方法和函数,方便用户进行系统辨识分析。
四、利用Matlab进行系统辨识的应用案例1. 系统辨识在控制系统中的应用系统辨识在控制系统中具有广泛的应用,如无人机控制、机器人控制等。
通过对系统进行辨识,可以建立准确的数学模型,并用于控制器设计和系统优化。
matlab系统辨识的原理
matlab系统辨识的原理Matlab系统辨识的原理Matlab是一种强大的数学软件,可以用于各种科学计算和数据分析。
其中,系统辨识是Matlab的一个重要应用领域。
系统辨识是指通过对系统输入输出数据的分析,推断出系统的数学模型,从而实现对系统的预测、控制和优化。
本文将从Matlab系统辨识的原理、方法和应用三个方面进行介绍。
一、原理Matlab系统辨识的原理基于系统的输入输出数据,通过对数据进行处理和分析,推断出系统的数学模型。
具体来说,系统辨识的过程可以分为以下几个步骤:1. 数据采集:通过实验或仿真等方式,获取系统的输入输出数据。
2. 数据预处理:对采集到的数据进行滤波、降噪、去趋势等处理,以提高数据的质量和可靠性。
3. 模型结构选择:根据系统的特点和应用需求,选择合适的模型结构,如ARMA、ARIMA、ARMAX等。
4. 参数估计:利用最小二乘法、极大似然法等方法,对模型的参数进行估计。
5. 模型检验:通过残差分析、模型预测等方法,对模型的拟合程度和预测能力进行检验。
二、方法Matlab系统辨识的方法主要包括时间域方法、频域方法和时频域方法三种。
1. 时间域方法:时间域方法是指通过对系统的输入输出数据进行时域分析,推断出系统的数学模型。
常用的时间域方法包括ARMA、ARIMA、ARMAX等。
2. 频域方法:频域方法是指通过对系统的输入输出数据进行频域分析,推断出系统的数学模型。
常用的频域方法包括FFT、AR、ARMA等。
3. 时频域方法:时频域方法是指通过对系统的输入输出数据进行时频分析,推断出系统的数学模型。
常用的时频域方法包括小波变换、Wigner-Ville分布等。
三、应用Matlab系统辨识的应用广泛,主要包括以下几个方面:1. 预测:通过对系统的历史数据进行分析,预测未来的趋势和变化。
2. 控制:通过对系统的数学模型进行分析和优化,实现对系统的控制和调节。
3. 诊断:通过对系统的输入输出数据进行分析,诊断系统的故障和异常。
利用Matlab进行系统辨识的技术方法

利用Matlab进行系统辨识的技术方法在Matlab中进行系统辨识的技术方法主要有参数估计法和非参数估计法两种。
1.参数估计法:参数估计法是通过拟合已知输入和输出数据的数学模型来估计系统的参数。
常用的参数估计方法包括最小二乘法(OLS)、最小二乘法(LSE)、最小二乘法(MLE)和极大似然估计法(MLE)等。
a) 最小二乘法(OLS):OLS方法通过最小化实际输出与模型预测输出之间的误差平方和来估计系统参数。
在Matlab中,可以使用lsqcurvefit函数来实现最小二乘法的系统辨识。
b) 最小二乘法(LSE):LSE方法是通过最小化实际输出与模型预测输出之间的误差平方和来估计系统参数。
在Matlab中,可以使用lsqnonlin函数来实现最小二乘法的系统辨识。
c) 最小二乘法(MLE):MLE方法是通过最大化似然函数来估计系统参数。
在Matlab中,可以使用mle函数来实现最大似然估计法的系统辨识。
2.非参数估计法:非参数估计法不需要事先指定系统的数学模型,而是直接根据输入和输出数据的统计特性进行系统辨识。
常用的非参数估计方法包括频域方法、时域方法和时频域方法等。
a) 频域方法:频域方法通过对输入和输出数据进行频谱分析来估计系统的频率响应。
常用的频域方法包括傅里叶变换、功率谱密度估计和频率响应函数估计等。
在Matlab中,可以使用fft函数和pwelch函数来实现频域方法的系统辨识。
b) 时域方法:时域方法通过对输入和输出数据进行时间序列分析来估计系统的时域特性。
常用的时域方法包括自相关函数估计和互相关函数估计等。
在Matlab中,可以使用xcorr函数来实现时域方法的系统辨识。
c) 时频域方法:时频域方法结合了频域方法和时域方法的优势,可以同时估计系统的频率响应和时域特性。
常用的时频域方法包括短时傅里叶变换和小波变换等。
在Matlab中,可以使用spectrogram函数和cwt函数来实现时频域方法的系统辨识。
使用Matlab技术进行系统辨识的基本方法

使用Matlab技术进行系统辨识的基本方法概述:系统辨识是指通过对已知输入输出数据的分析和处理,推断出系统的动态性质和数学模型的过程。
在科学研究、工程设计和控制应用中,系统辨识扮演着重要的角色。
而Matlab作为一种强大的数值计算和数据分析软件,为系统辨识提供了便利且高效的工具。
本文将介绍使用Matlab进行系统辨识的基本方法,并结合实例进行讲解。
一、数据采集与准备在进行系统辨识之前,首先需要采集到对应的输入输出数据。
一般来说,输入信号是已知的,可以通过外部激励或者系统自身的变动来获取;而输出信号则是根据输入信号通过系统响应得到的。
在采集数据时,需要注意数据的质量和采样频率的选择。
二、数据预处理在进行系统辨识之前,数据通常需要进行一些预处理,以去除噪声、平滑数据和调整时间序列等。
这可以通过Matlab中的数据处理函数和滤波器实现。
例如,可以使用高斯滤波器对数据进行平滑处理,或者使用降噪算法去除不必要的噪声。
三、参数估计参数估计是系统辨识的核心步骤之一,它通过对已知数据进行分析和处理,推断出系统的数学模型和参数。
在Matlab中,有多种方法和工具可供选择,如最小二乘法、最大似然法、系统辨识工具箱等。
这些工具可以根据不同的模型和数据类型灵活选择,并提供相应的算法和函数。
四、模型验证与优化根据估计得到的系统模型和参数,可以使用Matlab进行模型验证和优化。
模型验证是指将估计得到的模型与真实系统进行对比,检验其拟合程度和预测能力。
如果模型的拟合程度较差,则需要对参数进行调整和优化,以提高模型的准确性和稳定性。
五、模型预测与应用在系统辨识完成之后,可以使用得到的模型进行系统预测和应用。
通过对未知输入信号进行预测,可以得到相应的输出响应,进而实现对系统动态性质的分析和控制。
Matlab提供了丰富的预测和应用函数,例如时域模拟、频域分析、控制系统设计等,可以满足不同应用场景的需求。
六、案例分析为了更好地理解和掌握使用Matlab进行系统辨识的基本方法,下面通过一个简单的案例进行分析。
Matlab中的系统辨识和参数标识技巧

Matlab中的系统辨识和参数标识技巧引言:在工程和科学领域中,系统辨识是一项重要的任务。
通过对系统进行辨识和参数标定,我们可以建立数学模型来描述系统的行为。
在Matlab中,有许多工具和技巧可以用来进行系统辨识和参数标定。
本文将介绍一些常用的工具和技巧,以帮助读者更好地理解和应用这些方法。
一、准备工作在进行系统辨识和参数标定之前,我们首先需要准备一些基本的工作。
首先,我们需要收集系统的输入和输出数据。
输入数据通常是对系统施加的激励信号,例如阶跃信号或随机信号。
输出数据是系统对输入信号的响应。
收集足够量的数据对于准确辨识系统非常重要。
其次,我们需要确保数据的质量。
在收集数据时,我们需要注意采样频率和信噪比。
采样频率要足够高,以捕捉系统的快速动态响应;信噪比要足够高,以避免噪声对数据的影响。
如果数据质量不高,将会使得系统辨识和参数标定的结果不准确。
二、线性系统辨识线性系统辨识是系统辨识领域中的一项基本任务。
在Matlab中,可以使用System Identification Toolbox来进行线性系统辨识。
首先,我们可以使用中自相关函数(cross-correlation)来计算输入和输出数据之间的相关性。
这可以通过Matlab中的xcorr函数实现。
相关性分析可以帮助我们了解系统的输入和输出之间的关系,为后续的系统辨识提供参考。
接下来,我们可以使用频域分析方法来对系统进行辨识。
其中一个常用的方法是基于频率响应函数的辨识方法,例如最小二乘法(Least Squares)等。
这些方法可以通过Matlab中的tfest函数来实现。
另外,我们还可以使用时域辨识方法,例如最小均方误差法(Least Mean Squares)等。
时域辨识方法通常通过求解线性方程组来确定系统的参数。
在Matlab中,我们可以使用lsim和inv函数来实现这些方法。
三、非线性系统辨识与线性系统不同,非线性系统的辨识更加复杂。
Matlab中的系统辨识与自适应滤波

Matlab中的系统辨识与自适应滤波一、引言Matlab是一种常用的科学计算和数据分析软件,在信号处理领域有着广泛的应用。
系统辨识和自适应滤波是Matlab中的两个重要概念,它们在信号处理和控制系统中有着重要的作用。
本文将介绍Matlab中的系统辨识和自适应滤波的基本原理、应用场景以及常用的方法。
二、系统辨识系统辨识是指通过对系统输入和输出的观测数据进行分析,来确定系统的数学模型。
在实际应用中,我们经常需要了解和预测系统的行为,通过系统辨识可以获得系统模型,从而进行系统仿真、控制和优化等操作。
1. 系统辨识的基本原理系统辨识的基本原理是通过建立数学模型来描述系统的行为。
常见的系统模型包括线性模型和非线性模型。
线性模型可以用线性方程组描述,而非线性模型则包括一些复杂的数学函数。
利用系统辨识方法,我们可以通过观测系统的输入和输出数据,推断系统模型中的参数,从而得到系统模型。
2. 系统辨识的应用场景系统辨识在许多领域中都有广泛的应用。
在电力系统中,通过对电力负荷和发电机数据的观测,可以建立电力系统的模型,用于短期负荷预测和系统调度。
在通信系统中,通过对信号的采集和分析,可以进行信道建模和功率控制等操作。
此外,系统辨识还应用于机械系统、航空航天系统等领域。
3. 系统辨识的常用方法在Matlab中,有许多工具和函数可用于进行系统辨识。
常用的方法包括最小二乘法、极大似然法、模态分析法等。
在具体应用中,我们可以根据系统的特点选择合适的方法,并使用Matlab提供的函数进行系统辨识。
三、自适应滤波自适应滤波是指根据输入信号的特性,调整滤波器的系数以获得期望的输出信号。
在实际应用中,我们经常遇到信号受到噪声、干扰等因素影响的情况,利用自适应滤波技术可以削弱或消除这些干扰,提高信号的质量。
1. 自适应滤波的基本原理自适应滤波的基本原理是通过不断调整滤波器的系数,使得滤波器的输出与期望输出之间的误差最小。
自适应滤波器通过不断更新系数的方式,可以自动适应输入信号的变化,从而提高滤波器的性能。
Matlab_系统辨识_应用例子
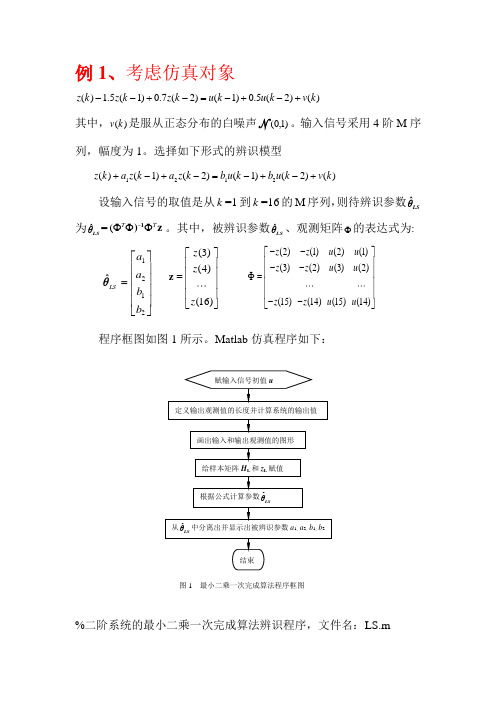
例1、考虑仿真对象)()2(5.0)1()2(7.0)1(5.1)(k v k u k u k z k z k z +-+-=-+-- 其中,)(k v 是服从正态分布的白噪声N )1,0(。
输入信号采用4阶M 序列,幅度为1。
选择如下形式的辨识模型)()2()1()2()1()(2121k v k u b k u b k z a k z a k z +-+-=-+-+设输入信号的取值是从k =1到k =16的M 序列,则待辨识参数LSθˆ为LS θˆ=(T T -ΦΦΦ1)z 。
其中,被辨识参数LSθˆ、观测矩阵Φ的表达式为: ⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=2121ˆb b a a LS θ (3)(4)(16)z z z ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦z (2)(1)(2)(1)(3)(2)(3)(2)(15)(14)(15)(14)z z u u z z u u z z u u --⎡⎤⎢⎥--⎢⎥Φ=⎢⎥⎢⎥--⎣⎦ 程序框图如图1所示。
Matlab 仿真程序如下:%二阶系统的最小二乘一次完成算法辨识程序,文件名:LS.mu=[-1,1,-1,1,1,1,1,-1,-1,-1,1,-1,-1,1,1]; %系统辨识的输入信号为一个周期的M序列z=zeros(1,16); %定义输出观测值的长度for k=3:16z(k)=1.5*z(k-1)-0.7*z(k-2)+u(k-1)+0.5*u(k-2); %用理想输出值作为观测值endsubplot(3,1,1) %画三行一列图形窗口中的第一个图形stem(u) %画输入信号u的径线图形subplot(3,1,2) %画三行一列图形窗口中的第二个图形i=1:1:16; %横坐标围是1到16,步长为1plot(i,z) %图形的横坐标是采样时刻i, 纵坐标是输出观测值z, 图形格式为连续曲线subplot(3,1,3) %画三行一列图形窗口中的第三个图形stem(z),grid on %画出输出观测值z的径线图形,并显示坐标网格u,z %显示输入信号和输出观测信号%L=14 %数据长度HL=[-z(2) -z(1) u(2) u(1);-z(3) -z(2) u(3) u(2);-z(4) -z(3) u(4) u(3);-z(5) -z(4) u(5) u(4);-z(6) -z(5) u(6) u(5);-z(7) -z(6) u(7) u(6);-z(8) -z(7) u(8) u(7);-z(9) -z(8) u(9) u(8);-z(10) -z(9) u(10) u(9);-z(11) -z(10) u(11)u(10);-z(12) -z(11) u(12) u(11);-z(13) -z(12) u(13) u(12);-z(14) -z(13)u(14) u(13);-z(15) -z(14) u(15) u(14)] %给样本矩阵 赋值ZL=[z(3);z(4);z(5);z(6);z(7);z(8);z(9);z(10);z(11);z(12);z(13);z(14);z(15); z(16)] % 给样本矩阵z L赋值%Calculating Parametersc1=HL'*HL; c2=inv(c1); c3=HL'*ZL; c=c2*c3 %计算并显示θˆLS%Display Parametersa1=c(1), a2=c(2), b1=c(3),b2=c(4) %从θˆ中分离出并显示a1、a2、b1、LSb2%End程序运行结果:>>u =[ -1,1,-1,1,1,1,1,-1,-1,-1,1,-1,-1,1,1]z =[ 0,0,0.5000,0.2500,0.5250,2.1125,4.3012,6.4731,6.1988,3.2670,-0.9386,-3.1949,-4.6352,6.2165,-5.5800,-2.5185]HL =0 0 1.0000 -1.0000-0.5000 0 -1.0000 1.0000-0.2500 -0.5000 1.0000 -1.0000-0.5250 -0.2500 1.0000 1.0000-2.1125 -0.5250 1.0000 1.0000-4.3012 -2.1125 1.0000 1.0000-6.4731 -4.3012 -1.0000 1.0000-6.1988 -6.4731 -1.0000 -1.0000-3.2670 -6.1988 -1.0000 -1.00000.9386 -3.2670 1.0000 -1.00003.1949 0.9386 -1.0000 1.00004.6352 3.1949 -1.0000 -1.00006.2165 4.6352 1.0000 -1.00005.58006.2165 1.0000 1.0000ZL =[ 0.5000,0.2500,0.5250,2.1125,4.3012,6.4731,6.1988,3.2670,-0.9386,-3.1949,-4.6352,-6.2165,-5.5800,-2.5185]Tc =[ -1.5000,0.7000,1.0000,0.5000]Ta1 = -1.5000a2 = 0.7000b1 = 1.0000b2 =0.5000>>-11-1010-10010从仿真结果表1可以看出,由于所用的输出观测值没有任何噪声成分,所以辨识结果也无任何误差。