船舶横摇运动中力矩研究分析
船舶参数横摇非线性力学特征数值分析

船舶参数横摇非线性力学特征数值分析杨波;王骁;吴明【摘要】为研究船舶参数横摇发生的力学机理,文章基于计算流体力学方法,对DTMB 5512船模规则波顶浪航行时的参数横摇运动进行了数值模拟.模拟结果表明:参数横摇复原力矩曲线会随横摇角增大而出现2个拐点,呈现出先增大、后减小、再增大的非线性特征;其零点、拐点及最大值点可以分别用垂荡、纵摇及船/波相对位置进行表征.文中方法实现了船舶参数横摇力学特征的数值分析,可为船舶波浪中的完整稳性评估提供新的方法.【期刊名称】《船舶力学》【年(卷),期】2019(023)007【总页数】8页(P802-809)【关键词】船舶;参数横摇;非线性特征;计算流体力学【作者】杨波;王骁;吴明【作者单位】海军大连舰艇学院航海系,辽宁大连 116018;海军大连舰艇学院航海系,辽宁大连 116018;海军大连舰艇学院航海系,辽宁大连 116018【正文语种】中文【中图分类】U661.30 引言当船舶纵浪航行时,复原力矩会随船体与波浪相对位置的改变而发生变化,对于具有较大外飘船首和方尾的船型,这种变化尤为明显。
此时很小的初始横向扰动也有可能导致大幅横摇运动,这种现象称为参数横摇。
一般认为,当海浪波长与船长近似相等、船舶与海浪的遭遇频率约为横摇固有频率的2倍时,最易发生参数横摇。
目前国际海事组织(IMO)正在推进的“第二代完整稳性衡准”中,将参数横摇作为船舶波浪中5种稳性失效模式之一,是目前船舶水动力学领域研究的热点。
参数横摇的研究方法主要有模型试验和理论研究两种。
理论研究方面,Pauling和Rosenberg(1959)[1] 最早采用单自由度马休方程对参数横摇进行求解,并假定波浪中初稳性高按弦值函数变化,但该方法对参数横摇的预报并不准确。
随着研究不断深入,研究者开始注意到横摇阻尼、非线性复原力矩和其它自由度运动对参数横摇的影响,并开展了相关研究。
对于横摇阻尼,常用方法是基于横摇衰减实验数据,将其表示为横摇角速度的高阶函数[2-3] 。
三体船操纵与横摇耦合运动试验与分析
三体船操纵与横摇耦合运动试验与分析船舶在航行过程中,由于涉及到复杂的水动力学问题,船体的运动也会受到多种因素的影响,而横摇是其中比较典型的一种运动形式。
因此,对于舰艇进行操纵和控制时,必须充分考虑到船体的横摇运动,并采取相应的措施,以保证船舶的安全性和航行效率。
在本文中,将介绍一种船舶操纵与横摇耦合运动试验与分析。
一、试验目的本次试验的目的是探讨船舶操纵与横摇耦合运动的特性,并对其进行分析。
通过试验,可以得到以下方面的参考数据:1. 船舶在不同操纵条件下的横摇幅度、周期和频率等参数。
2. 不同操纵条件下的船舶横向加速度及姿态角等参数。
3. 分析船舶操纵与横摇的耦合特性,探究操纵对横摇的影响以及如何通过操纵来控制和减小船舶的横摇运动。
二、试验方法本次试验采用的是真实船舶模型,通过在水槽中设置波浪平台来模拟船舶在风浪条件下的横摇运动。
试验过程中将记录下来船舶的操纵动作,如舵角、推进力等参数,并通过惯性测量系统来实时记录船舶姿态、速度、加速度等数据,最终利用Matlab等工具进行数据分析和处理。
三、试验结果在试验过程中,分别对舵角、速度等操纵参数进行多次试验,得到了相应的实验数据。
其中,船舶的横摇振幅和周期与船速和船舶构型等因素都有关系,试验结果如下:1. 船速对横摇振幅的影响:当船速较低时,横摇振幅较小,随着船速增加,横摇振幅逐渐增大,达到一个最大值后开始逐渐减小。
2. 船舶构型对横摇振幅的影响:在相同的船速下,不同平台宽度的船舶,横摇振幅也有所不同。
当平台宽度较小时,横摇振幅会比较大,而平台较宽时则会有所减小。
3. 操纵对横摇的影响:若未加任何操纵时,船舶的横摇运动会明显增大,而操纵动作(如舵角)的变化可以对横摇进行控制和调节,减小横摇的振幅和周期。
四、分析和结论通过对试验结果的分析,得出了以下结论:1. 横摇运动受多种因素的影响,如船速、船舶构型等因素都会影响横摇振幅和周期的大小。
2. 操纵动作可以帮助减小船舶的横摇振幅和周期,调节范围也受舵盘角度的限制。
船舶摇摆实验
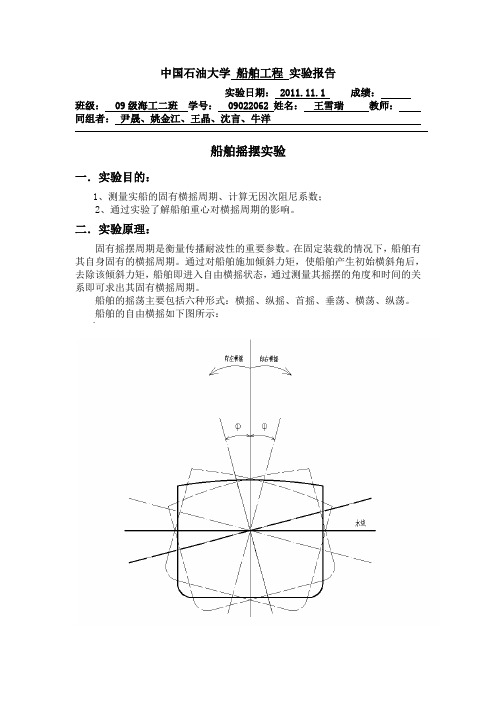
中国石油大学船舶工程实验报告实验日期: 2011.11.1 成绩:班级: 09级海工二班学号: 09022062 姓名:王雪瑞教师:同组者:尹晟、姚金江、王晶、沈言、牛洋船舶摇摆实验一.实验目的:1、测量实船的固有横摇周期、计算无因次阻尼系数;2、通过实验了解船舶重心对横摇周期的影响。
二.实验原理:固有摇摆周期是衡量传播耐波性的重要参数。
在固定装载的情况下,船舶有其自身固有的横摇周期。
通过对船舶施加倾斜力矩,使船舶产生初始横斜角后,去除该倾斜力矩,船舶即进入自由横摇状态,通过测量其摇摆的角度和时间的关系即可求出其固有横摇周期。
船舶的摇荡主要包括六种形式:横摇、纵摇、首摇、垂荡、横荡、纵荡。
船舶的自由横摇如下图所示:`当船倾斜时,受到由外力引起的倾斜力矩和自身的复原力矩,如下图:倾斜角度随时间的变化曲线(时历曲线)如下图所示:船舶横摇的摇幅衰减情况可以这样表示:将相邻的两个摇幅依次相减,求出每次摆动中的衰减角 摆至另一边的摇幅已减少,即为:再将一次摆动的摇幅平均,得到代表这次摆动幅度大小的平均摇幅将对应的 及 绘制在坐标纸上,横坐标 ,纵坐标 。
得到的曲 线即为横摇消灭曲线,代表了横摇衰减的情况,也表示了阻尼的情况。
在半个周期时间间隔内,横摇幅值绝对值的变化为:由以上关系可得无因次衰减系数的表达式为:三.实验设备与仪器:k θ1k +θ1k k +-=∆θθθm θ21k k m++=θθθmθθ∆m θθ∆μπθθ-+=ek1k k1k ln 1θθπμ+=1.实验用船舶(模);2.倾角测量装置(包括倾角传感器,接口和连线,数据采集计算机)。
四.实验步骤:1、确认所有实验设备处于正确的初始状态,包括:船舶(模)的摇摆运动不会受到干扰,倾角测量装置已上电并运行正常;2、运行倾角测量软件;3、给船舶施加倾斜力矩使其倾斜;4、点击倾角测量软件界面上的“开始”按钮,此时开始测量倾角数据并显示在界面上;5、去除倾斜力矩使船舶进入自由横摇状态;6、等待一定时间后,点击倾角测量软件界面上的“暂停”按钮,停止测量倾角数据;7、将记录下来的倾角数据保存在指定的文件中;8、在船舶的某一高度上增加重量。
船舶横摇运动中力矩分析

船舶横摇角较小的情况下可以应用线性横摇理论来研究船舶的横摇运动,将船舶看作是一个刚体,在海浪的干扰下,船体绕中心线摆动,规定从船尾向船首看,顺时针为正,逆时针为负,取船舶的横摇角为φ横摇角速度为φ,横摇角加速度为φ ,船舶在波浪中的横摇所受的力矩可以看成船舶在静水中横摇所受的力矩加上波浪的正浮状态船体的扰动力矩,为此,船舶在波浪上的横摇受以下几种力矩的作用:一、复原力矩当船舶横摇某一角度Φ时,此时浮心和重心不在同一垂线上,形成一个使船舶回复到原来位置的力矩,即复原力矩)(ΦM ,当横摇角不太大时,可以应用初稳性公式:Φ-=ΦDh M )( 式中:D 为排水量;h 为初稳性高。
二、阻尼力矩船在水中横摇,由于船体和水之间存在相对速度,船体必然受到阻力,阻尼力 矩大体受到三个原因的作用:摩擦阻尼,兴波阻尼,漩涡阻尼。
(1)摩擦阻尼它是水的粘性引起的,其数值的大小一般认为和角速度的平方成比例,在横摇中,摩擦阻尼所占的比重是很小的,往往可以忽略。
(2)兴波阻尼它是由于船的运动在水表面形成波浪,消耗了船体本身的能量而形成的,一般认为兴波阻尼比例于角速度的一次方。
(3)漩涡阻尼它是在船体弯曲或突出物附近形成漩涡,损失部分能量而形成的。
船舶横摇阻尼力矩与船体形状、装载情况、舭龙骨、横摇频率和幅值等多种因素有关,精确的确定阻尼力矩是目前横摇研究中最困难的问题。
用理论方法确定的阻尼力矩尚不能用于实际,最可靠的方法是进行实船或模型试验。
小角度横摇时,认为船舶是时间恒定的线性系统,阻尼力矩与角速度成线性关系,其计算公式如下:φφ N M z 2-= Dh J J N )(φφφφμ∆+= 其中: φN 为横摇阻尼系数;φμ为无因次横摇衰减系数;φJ 为转动惯量;φJ ∆为附加转动惯量。
三、惯性力矩船舶在横摇运动中存在角加速度,则必然会产生惯性力矩,惯性力矩两部分组成,即船舶自身的惯性力矩和附加惯性力矩,它与横摇角加速度的关系可写成:φφφφ )()(J J M ∆+-= 式中:φJ 为转动惯量;φJ ∆为附加转动惯量。
船舶非线性参激横摇运动的分析

总第175期水运科技信息1999年第4期收稿日期:1999205215船舶非线性参激横摇运动的分析张 兢(武汉交通科技大学航运学院 武汉 430062)摘 要 应用非线性振动理论中的摄动法,求出了描述参激横摇运动的非线性方程的解,并分析解的稳定性。
结果表明,参激横摇运动具有明显的非线性特征。
关键词 参激横摇运动 摄动法 非线性振动理论1 引言由于纵摇或垂荡对横摇的耦合作用,或由于波浪的周期性干扰,会引起横摇回复力矩的周期性变化。
这种系统内部参数的变化对系统运动的影响,称为参数激励。
由参数激励所引起的横摇运动,称为参激横摇。
在一定的条件下,参激横摇会变得不稳定,导致增幅横摇运动。
这种现象就是横摇参数共振,参激横摇运动及参数共振现象,是当前国际上关于船舶稳性和耐波性研究的热门课题之一。
描述参激横摇运动的主要数学模型是M ath ieu 方程。
但是M ath ieu 方程描述的是一个单自由度的时变线性系统。
而参激横摇是一个大摇幅的非线性问题,用线性模型来研究大角度的非线性横摇问题,显然不尽合理。
因此,本文采用非线性参激横摇运动方程作为研究的基础,用非线性振动理论中的摄动法,分析参激横摇运动的基本特性,探索它的运动规律。
2 运动方程根据船舶的受力分析,可写出下列形式的横摇运动方程:Ηβ+D (Ηα,t )+R (Η,t )=E (t )+W (t )(1)式中:t ——时间;Η——;Ηα=d Η d t ——横摇角速度;Ηβ=d 2Η d t 2——横摇角加速度。
D (Ηα)代表横摇阻尼力矩,它是横摇角速度的函数,阻尼力矩的常用模式有三种:线性模式、线性加平方模式和线性加立方模式。
本文采用第三种模式,即D (Η)=n 1Ηα+n 3Ηα3(2)式中:n 1和n 3分别为线性阻尼系数和非线性阻尼系数,通过船舶横摇衰减试验来确定。
R (Η,t )代表横摇回复力矩,它是横摇角和时间的函数。
R (Η,t )由两部分组成:第一部分是船舶在静水中的回复力矩,与时间无关。
船舶参数横摇数值计算与力学机理分析

引用格式:朱军,朱韬,王智宇,等.船舶参数横摇数值计算与力学机理分析[J ].中国舰船研究,2020,15(3):25-31.ZHU J ,ZHU T ,WANG Z Y ,et al.Numerical calculation and mechanical mechanism analysis of ship parametric rolling [J ].Chinese Journal of Ship Research ,2020,15(3):25-31.船舶参数横摇数值计算与力学机理分析朱军*1,朱韬2,王智宇1,夏齐强2,黄昆仑1,葛义军11海军工程大学舰船与海洋学院,湖北武汉4300332海军研究院特种勤务研究所,上海200235摘要:[目的]参数横摇是船舶在波浪中的特殊失稳现象,现有研究认为,波浪经过船体时稳性参数的变化是激发船体横摇的主要原因,但其力学机理并不明确。
[方法]首先,基于惯性坐标下的垂荡和纵摇耦合运动方程,以及船体坐标下的横摇运动方程,建立垂荡、纵摇和横摇的混合动力学模型;然后采用所提出的摇荡耦合切片计算方法,数值计算船舶参数横摇运动,分析数值计算的横摇运动规律,并基于能量原理提出发生参数横摇的衡准。
[结果]研究结果表明,船舶发生参数横摇的力学机理是,在横摇角增大过程中回复力矩系数吸收的能量小于横摇角减小过程中回复力矩释放的能量;发生参数横摇的衡准是,回复力矩系数一阶谐波分量的相位角位于[0,π]内。
[结论]明确参数横摇力学机理有助于深入认识参数横摇失稳模式的物理本质,提出的参数横摇衡准对于船舶第2代完整稳性衡准的制定具有参考意义。
关键词:船舶;波浪;参数横摇;力学机理中图分类号:U661.33文献标志码:ADOI :10.19693/j.issn.1673-3185.01618Numerical calculation and mechanical mechanism analysis ofship parametric rollingZHU Jun *1,ZHU Tao 2,WANG Zhiyu 1,XIA Qiqiang 2,HUANG Kunlun 1,GE Yijun 11College of Naval Architecture and Ocean Engineering ,Naval University of Engineering ,Wuhan 430033,China2Institute of Specialized Services ,Naval Research Academy ,Shanghai 200235,ChinaAbstract :[Objective ]The parametric rolling is a special instability phenomenon of ship in the wave.Thecurrent research proves that the change of the stability parameter when the wave passes through the hull is the reason for the rolling motion of the hull ,but the mechanical mechanism is unclear.[Methods ]Firstly ,based on the equations of heave and pitch coupled motion in inertial coordinates and the equations of roll motion in hull coordinates ,a hybrid dynamic model of heave pitch and roll was established ;secondly ,the proposed method of oscillating strip method was used to calculate the motion of shipparametric rolling numerically ,and a criterion for parameter roll was proposed based on the principle of energy.[Results ]The research results show that the mechanical mechanism for the occurrence ofparametric rolling of a ship is that the energy absorbed by the recovery moment coefficient during the increase of the roll angle is less than the energy released by the recovery moment during the decrease of the roll angle ;the criterion is that the phase angle of the first-order harmonic component of the recovery torque coefficient lies within [0,π].[Conclusions ]Defining the mechanical mechanism of parametric roll is helpful to understand the physical nature of the parametric roll instability mode.The proposed parametric roll criterion is of reference significance for the development of the second generation intactstability criterion of the ship.Key words :ship ;waves ;parametric rolling ;mechanical mechanism收稿日期:2019-05-21修回日期:2019-08-20网络首发时间:2020-5-614:00基金项目:国家自然科学基金面上项目资助(51179199)作者简介:朱军,男,1959年生,博士,教授。
多自由度耦合的船舶参数横摇运动分析和数值计算

多自由度耦合的船舶参数横摇运动分析和数值计算船舶的横摇运动是指船舶在水平方向上由于外界环境力的作用而发生的左右摆动运动。
对于多自由度耦合的船舶系统而言,横摇运动的分析和数值计算是一个非常复杂的问题。
这种系统的船体在不同自由度上的运动相互耦合,因此需要考虑多种因素的影响,如船体结构、载荷分布、水动力与结构动力的耦合效应等。
在进行多自由度耦合的船舶参数横摇运动分析和数值计算时,一般采用数学模型来描述船体在横摇过程中的运动。
这个数学模型通常包括船舶的结构特性、水动力和结构动力之间的相互作用等因素。
通过建立这个数学模型,可以利用物理原理和数学方法来研究船舶横摇运动的特性,比如横摇的周期、振幅、频率等。
在进行横摇运动分析时,需要考虑到船舶的多自由度耦合效应。
这种耦合效应包括船体在横滚、纵摆和横向平移等不同自由度上的运动之间的相互作用。
这些自由度之间的相互作用会对船舶的横摇运动产生影响,使得其运动变得更加复杂和难以预测。
为了进行多自由度耦合的船舶参数横摇运动的数值计算,一般采用数值求解方法。
这些方法包括有限元法、边界元法、流体-结构相互作用方法等。
通过这些数值方法,可以对船舶在横摇过程中的动态响应进行精确的计算和分析,得出船舶在不同情况下的横摇运动特性。
在进行多自由度耦合的船舶参数横摇运动分析和数值计算时,需要考虑到各种复杂因素的影响,如船舶结构的非线性特性、海洋环境的不确定性、船舶载荷的变化等。
为了能够准确地评估船舶在横摇运动中的性能和安全性,必须进行详细的分析和计算,以及充分考虑到多自由度耦合效应的影响。
综上所述,多自由度耦合的船舶参数横摇运动分析和数值计算是一个复杂而重要的问题。
只有通过对船舶系统进行深入分析和精确计算,才能更好地理解船舶在横摇过程中的运动特性,从而为船舶设计和运行提供更好的指导和保障。
破损船舶瘫船时的横摇运动分析

破 损 船 舶 瘫 船 时 的横 摇 运 动 分 析
胡丽芬 ,鲁 江 , 张全 忠 , 田忠 民
( 1 . 鲁 东大学交通 学院,烟 台 2 5 0 0 6 4 ;2 中国船舶科 学研 究中心,无锡 2 1 4 0 8 2)
摘
要
为 了研 究破损船舶瘫船 时的横 摇运动 , 采用 Da v e n p o r t 风 谱计算定 常风和 阵风 的风倾力矩 , 采用 I T T C双 参数 波谱 计算不规则波波浪力矩 ,采用增加 重量法计算破损进水 ,建 立 了破损船舶 瘫船时的横摇运动方程。 最后 以一艘船舶 为例 ,计算 了船舶 非对称破损 、对称破损 以及 完整状 态下的横 摇运 动幅值 ,分析 了破损船舶
风浪 并存 时单 自由度横 摇运 动 方程 如下 :
+
(
㈩
为 横摇惯 性 矩 ,
式中, 为横 摇 角 , 为 线性 阻尼 系数 , 为非线 性 阻尼 系数 , 为 船舶 重量 ,
为 随 时间变 化 的横摇 附加惯 性 矩 ,G z 为对 应 不 同横 倾 角 时的 复原 力臂 , 为基 于 F r o u d . Kr y l o v假 设 的波 浪激励 力 矩 。 1 . 2 . 1 风倾 力矩 计 算 风 倾 力矩 的计 算可 用下 式表 示 :
nd
. n d ( 0 为风 倾 力矩 ,
。 (
( f ) = o . s x p . C m V C
+ C m
( f )
( 2 )
式 中 ,P a i r 是空气 密 度 ,c 为空气 阻力 系数 ,
中
国
造
船
学 术论 文
空间点、海浪和船体运动关系,即空间固定坐标系o  ̄ r t (、运动坐标系G 和随船平移的参考坐标
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
船舶横摇角较小的情况下可以应用线性横摇理论来研究船舶的横摇运动,将船舶看作是一个刚体,在海浪的干扰下,船体绕中心线摆动,规定从船尾向船首看,
顺时针为正,逆时针为负,取船舶的横摇角为φ横摇角速度为φ
,横摇角加速度为φ ,船舶在波浪中的横摇所受的力矩可以看成船舶在静水中横摇所受的力矩加上波浪的正浮状态船体的扰动力矩,为此,船舶在波浪上的横摇受以下几种力矩的作用:
一、复原力矩
当船舶横摇某一角度Φ时,此时浮心和重心不在同一垂线上,形成一个使船舶回复到原来位置的力矩,即复原力矩)(ΦM ,当横摇角不太大时,可以应用初稳性公式:
Φ-=ΦDh M )( 式中:D 为排水量;
h 为初稳性高。
二、阻尼力矩
船在水中横摇,由于船体和水之间存在相对速度,船体必然受到阻力,阻尼力 矩大体受到三个原因的作用:摩擦阻尼,兴波阻尼,漩涡阻尼。
(1)摩擦阻尼
它是水的粘性引起的,其数值的大小一般认为和角速度的平方成比例,在横摇中,摩擦阻尼所占的比重是很小的,往往可以忽略。
(2)兴波阻尼
它是由于船的运动在水表面形成波浪,消耗了船体本身的能量而形成的,一般认为兴波阻尼比例于角速度的一次方。
(3)漩涡阻尼
它是在船体弯曲或突出物附近形成漩涡,损失部分能量而形成的。
船舶横摇阻尼力矩与船体形状、装载情况、舭龙骨、横摇频率和幅值等多种因素有关,精确的确定阻尼力矩是目前横摇研究中最困难的问题。
用理论方法确定的阻尼力矩尚不能用于实际,最可靠的方法是进行实船或模型试验。
小角度横摇时,认为船舶是时间恒定的线性系统,阻尼力矩与角速度成线性关系,其计算公式如下:
φ
φ N M z 2-= Dh J J N )(φφφφμ∆+= 其中: φN 为横摇阻尼系数;
φμ为无因次横摇衰减系数;
φJ 为转动惯量;
φJ ∆为附加转动惯量。
三、惯性力矩
船舶在横摇运动中存在角加速度,则必然会产生惯性力矩,惯性力矩两部分组成,即船舶自身的惯性力矩和附加惯性力矩,它与横摇角加速度的关系可写成:
φφφ
φ )()(J J M ∆+-= 式中:φJ 为转动惯量;
φJ ∆为附加转动惯量。
四、海浪扰动力矩
波浪改变了船体水下的体积的形状,从而产生复原扰动力矩,船体的存在阻止了波浪的运动,反之波浪也给船体一个作用力矩。
海浪扰动力矩是引起船舶横摇运动的主要原因,它由三部分组成:
(1)由于波浪改变船体水下部分体积的形状而产生的复原力矩公式为:
e BH Dh M α=
(2)海浪对船舶航行时的阻尼扰动力矩可表示为:
e BZ N M α
φ 2=
(3)船体的附加惯性扰动方矩可表示为: e BG J M α
φ ∆= 故波浪扰动力矩可表示为:
=),,(e e e M αα
α e Dh α+e N αφ 2+e J αφ ∆ 五、扶正力矩
由于减摇装置的存在,当波浪作用到船上时,减摇装置给船一个扶正力矩,以使船舶的横摇角减小,用于抵消波浪对船舶的作用力。
公式如下:
f Dh M α-=Φ)(。