8姿轨控分系统设计2
第10章航天器姿态与轨道控制分系统(1)
3. 航天器轨道控制系统
3.2 航天器的轨道机动与轨道保持
航天器在控制系统作用下使其轨道发生有 意的改变称为轨道机动。轨道机动方式一 般有两种: 无线电指令控制系统或称遥控系统; 惯性控制系统。 变轨控制分为轨道改变和轨道转移。 轨道保持是对在轨航天器受到外界干扰的 作用下偏离预定轨道的修正。
8
1. 航天器控制的基本概念
1.6 姿态控制与轨道控制的关系
航天器是一个比较复杂的控制对象,一般来说轨道控制与姿态控制密切 相关。为实现轨道控制,航天器姿态必须符合要求。即当需要对航天器 进行轨道控制时,同时也要求进行姿态控制。在某些具体情况或某些飞 行过程中,可以把姿态控制和轨道控制分开来考虑。有些应用任务对轨 道没有严格要求,如空间环境探测卫星,则只有姿态控制系统。
3
1. 航天器控制的基本概念
1.2.航天器的控制
航天器在轨道上运动将受到各种力矩的作用。从刚体力学的角度来 说,力使航天器的轨道产生摄动,力矩使航天器姿态产生扰动。 航天器的控制可以分为两大类:轨道控制和姿态控制。 1.对航天器的质心施加外力,以有目的地改变其运动轨迹的技术, 称为轨道控制。 2.对航天器绕质心施加力矩,以保持或按需要改变其在空间的定向 技术,称为姿态控制。
11
1. 航天器控制的基本概念
星上自主控制框图 星—地大回路控制框图
轨道运动
星载控制器
执行机构
星体姿态和轨道动力学
姿态运动
卫星动力学
⊗
给定
敏 感 器
姿态轨道 控制器
敏感器
执 行 机 构
跟踪
遥测
遥控
跟踪
遥测
遥控
数据处理 测定轨道
控制参数 计算
12
航天器伴星长期稳定伴飞姿轨控仿真系统设计
关键 词 : 星 ; 道 控 制 ; 态 控 制 ; 真 伴 轨 姿 仿
中 图 分类 号 : 4 2 4 V 1. 文 献 标 识 码 : B
S t lie Co t o y t m i ul to o n — t r r a i n Fl i a e lt n r lS s e S m a i n f r Lo g — e m Fo m to y ng
td o t lm to ,a c m iai o t lpo c i m d n o e n e a a n i ui n i n n r u ec nr e d o bn t n c nr r e t s a ea d cd d u d rm t b a d s l k e v o me t o o h o o j l m n r f s uai .T ec nrl rjc i ts d a d ters l a ep o e ob e a l ; h rf ete a ftess m i l o m t n h o t oet s et n eut h v r d t erl b tee r h i o yt op e h s v i e o m h e
d s n i rah da d tepoetfrln ei s e c e n h rje o o g—tr sa l omainf igi p oe ob e s l. g em tbyfr t yn s rv d t efai e o l b
KEYW ORDS: o mai n f i g F r t y n ;O b tc n r l o l r i o t ;At t d o t l i lt n o t u e c nr ;S muai i o o
第2卷 第1期 7 0
城市轨道交通行车调度指挥系统设计
城市轨道交通行车调度指挥系统设计城市轨道交通行车调度指挥工作由调度控制中心实施,实行高度集中统一指挥,以使各个环节紧密配合,协调工作,保证列车安全、正点运行。
行车调度工作是城市轨道交通系统的核心,它的好坏直接影响乘客运输任务的完成情况。
一、基本任务(1)组织指挥各部门、各工种严格按照列车运行图工作。
(2)监控列车到达、出发及途中运行情况,确保列车正常运行秩序。
(3)当列车运行秩序不正常时,及时采取措施,尽快恢复正常运行秩序。
(4)及时、准确地处理行车异常情况,防止行车事故的发生。
(5)随时掌握客流情况,及时调整列车运行方案。
(6)检查监督各行车部门执行运行图情况,发布调度命令。
(7)当发生行车事故时,按规定程序及时向上级主管部门汇报,并采取措施防止事故扩大,积极参与组织救援工作。
二、调度指挥机构及流程为统一指挥,有序组织运输生产活动,城市轨道交通系统设立调度控制中心。
调度控制中心实行分工管理原则,按业务性质划分若干部分,设置不同的调度工种,如在控制中心通常设有行车调度、电力调度和环控调度等调度工种。
按运营调度指挥的层级关系,控制中心的行调、电调和环调在值班主任的统一指挥下,按调度流程发布调度命令,组织车站/车辆段、供电、机电值班人员按正常运营的工作流程开展工作。
其运营调度指图7-12运营调度指挥层次架构三、行车调度命令在组织指挥列车运行过程中,行车调度员按规定在进行某些行车作业时需发布调度命令,行车调度命令是指行车调度员在指挥列车运行过程中发布的对行车作业具有严肃性和强制性的指令。
行车调度员在发布调度命令前,应详细了解现场情况,并听取有关人员的意见;调度命令发布后,有关行军人员必须严格执行。
1.行车调度命令的分类(1)口头命令。
在无线录音设备正常状态时,行车调度员发布的行车调度命令均以口头命令下达。
(2)书面命令。
在录音设备故障停用时,遇列车救援、反方向运行及ATP 切除运行均需发布书面命令。
(3)口头通知。
8姿轨控分系统设计2

④ 对系统可能出现的故障及排除故障的对策进行模拟研究;
⑤ 验证星载计算机数据处理能力和对姿轨控支持功能; ⑥ 验证敏感器和执行机构数学模型正确性; ⑦ 验证在不同工作模式下姿轨控分系统单机协同工作的匹配性; ⑧ 进行姿轨控分系统模飞;
⑨ 找出设计缺陷,确定技术状态。
(4)单机精度测试与标定
① 陀螺性能测试: 测量范围、测量精度、常值漂移、零偏重复性、零偏稳定 性、标度因数、标度因数重复性、标度因数随温度变化、零偏 随温度变化等。
Hi k1
Hi k2
计算合成卸载角动量 ΔH=Cw*Δh
hi
否
计算磁力矩器加电方向 M c Ssgn ( B H )
否
|ΔH|<0.001
是
B和ΔH夹角大于45º 且小于135º
是
三轴控制指 令为0
反作用轮卸载
磁力矩器 三轴控制指令为零
计算各轴上磁力矩器按照加电方向 工作产生控制力矩Tmi,磁力矩器 异常产生控制力矩为零
反作用飞轮
(2)推进组件
根据牛顿第二定律,利用质量喷射排出,产生反作用推力, 这也正是这种装置被称为推力器或喷气执行机构的原因。当 推力器安装使得推力方向通过航天器质心,则成为轨道控制 执行机构;而当推力方向不过质心,则必然产生相对航天器 质心的力矩,成为姿态控制执行机构。
质量排出型推力器
(3)磁力矩器
姿态控制算法
ω
推力器相平面控制
I ω2 V ω1 II α1 III VI VII α2 IV α
ω1x
ω2 xபைடு நூலகம்
ωbix
推力器继电特性
V
ω0
TC K p Aerr Kd ωerr
委内瑞拉遥感卫星姿轨控系统方案及在轨验证
f o r ma n c e a r e p r e s e n t e d. F u r t he r mo r e, t h e a t t i t u d e a n d o r b i t c o n t r o l s y s t e m s c h e me i s d e mo n s t r a t e d o n o r —
空 间控 制技术 与应用
・
第3 9卷
第 5期
48 ・
Ae r o s p a c e Co n t r o l a n d Ap p l i c a t i o n
2 0 1 3年 l 0月
委 内瑞 拉 遥 感 卫 星 姿 轨 控 系统 方 案 及 在 轨 验 证
曾春 平 , 刘 其睿 , 董 筠
委 内瑞 拉 遥 感 卫 星 ( V R S S . 1 ) 是 中国第 一 颗 整
星 出 口的光 学 遥 感 卫 星 , 有效载荷为两台 2 . 5 m 分 辨率全 色/ l O m分 辨 率 多 光 谱 T D I C C D相 机 和 两 台 1 6 m分 辨率 多 光 谱 C C D 相 机. V R S S . 1卫 星 是 一 颗 对地 定 向 的 三轴 稳 定 。 卫星 , 运行 在 6 4 0 k m 左 右 的太 阳 同步轨 道上 . 姿 轨 控分 系统 是 整个 卫 星 系 统 V R S S 一 1 卫 星 姿 轨控 分 系 统 由 6个 二 浮 陀螺 、 2 个 星敏 感器 、 2个红 外 地球 敏 感 器 、 1个 双轴 数字 太
At t i t ud e a n d Or bi t Co n t r o l Sy s t e m De s i g n a nd O n- o r b i t Te s t 0 f VRS S. 1 Sa t e l l i t e
火星姿轨控系统设计
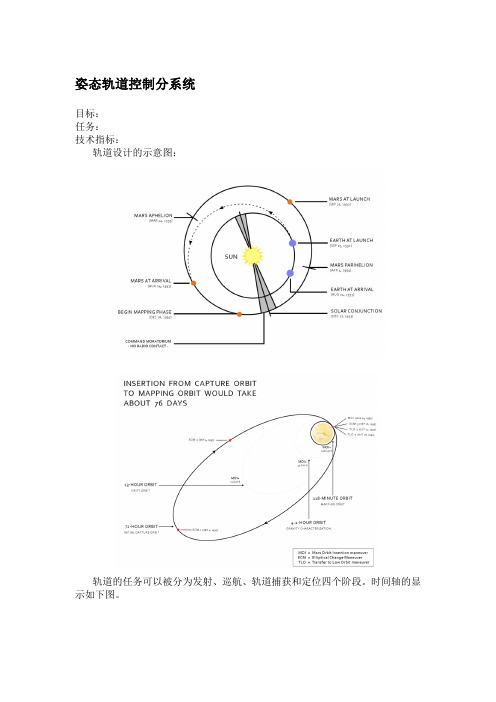
姿态轨道控制分系统
目标:
任务:
技术指标:
轨道设计的示意图:
轨道的任务可以被分为发射、巡航、轨道捕获和定位四个阶段。
时间轴的显示如下图。
发射和插入阶段使用的泰坦3/转移轨道(TOS)。
巡航阶段有多次轨道修正机动(TCMs)。
火星轨道的插入(MIO)阶段有一序列的确定的和统计的机动,并且火星和探测器之间建立关联之后需要进一步的纠正使探测器进入定位轨道。
定位阶段每隔两周需要进行机动消除重力不规则和大气阻力所造成的影响。
过程如下图所示。
进行火星探测器轨道初步设计时,我们可得到在四个阶段中的各设计量如下表。
在参考美国较为成功的探测器精神号、机会号、凤凰号等火星探测器,初步选定姿态控制系统为冗余结构的4个动量轮,发动机为两套推力系统。
大推力系统采用甲基联氨/四氧化二氮二组元推进剂,小推力系统采用肼单组元推进剂。
根据发动机的性能指标和各速度增量的要求,选择8个大推力的喷管,其中4个位于船尾,提供约500牛的推力用于航迹修正、火星轨道插入机动和大轨道修正,另外4个沿着两边的飞船,提供约20牛的滚转机动;16个小推力的喷管,其中8个提供约4.5 牛用于小轨道修正,另外8个约0.9 牛用于卸载动量轮的饱和;经过计算可得到推进剂的总质量大小约为1400kg。
喷管的摆放如下图。
卫星姿轨控系统设计与分析平台软件方案及实现
74空间电子技术SPACE ELECTRONIC TECHNOLOGY2016年第2期卫星姿轨控系统设计与分析平台软件方案及实现①刘其睿1 ’2,王新民1 ’2,刘洁 1 ’2,张俊玲1 ’2(1.北京控制工程研究所,北京100190;.空间智能控制技术重点实验室,北京100190)摘要:随着卫星控制系统工程技术的不断发展,对设计与分析工作的数字化平台化需求日益迫切。
文章提出一种基于Matlab/Simulink开发工具的卫星姿轨控系统设计与分析平台软件方案,采用由软件运行界面框架和软件功能模块相结合的软件总体架构,实现卫星姿轨控系统总体方案设计与仿真验证一体化的设计环境。
软件实现结果表明该方案的有效性和可行性,有助于卫星姿轨控系统的快速设计与分析。
关键词:姿轨控系统;设计与分析平台;应用软件D O I:10. 3969/j.issn. 1674-7135.2016.02.014Scheme and Implementation of Satellite AOCS Designand Analysis Platform Application SoftwareLIU Qi-rui1'2,W A N G Xin-min12 ,LIU Jie12 ,Z H A N G Jun-ling12(1. Beijing Institute of Control Engineering,Beijing 100190,China;2. Key Laboratory 〇f Aerospace Intelligent Control Technology,Beijing 100190,China)Abstract:The development of s atellite control engineering makes urgent demands of digital platform for design and analysis of A0CS( Attitude and Orbit Control System). In this paper a scheme based on Matlab/Sim Satellite AOCS Design and Analysis Platform Application Software. The software architecture,which is helpful to integrative design environment f or scheme design and simulation verification of satellite AOCS subsystem is composed of user interfacc frame and functional m odule. The result of software implementation verifies the validity and availability of software scheme,which benefits rapid satellite AOCS design and analysis.Key words:AOCS;Design and analysis platform;Application software〇引言在卫星控制系统开发过程中,设计人员经过多 年实践积累了丰富的知识和经验[1’2]。
《姿轨控分系统设计》课件
整体控制
整合姿态控制和轨道控制,协调 运行,确保有效执行任务。
结论
1 总结
本文介绍了卫星设计中的姿态控制系统和轨道控制系统的设计,以及两种系统的整合, 详细阐述了其设计思路、方法、实验过程和验证结果。
2 展望
将来,随着空间卫星技术的不断发展,姿轨控分系统设计将更加全面、稳定、智能,为 人类探索空间、服务于社会事业提供更加有力的支持。
传感器选择
选择精度高、可靠性强的陀 螺仪、加速度计、磁力计。
控制器设计
构建合理的控制算法,设计 复杂的控制律,保证姿态控 制的精度和稳定性。
实验验证
针对控制器的仿真验证和实 际测试,检验控制精度、响 应速度、可靠性等。
轨道控制系统设计
1
轨道参数测量
位置测量和速度测量是轨道控制的基础,选择合适的参数测量仪器。
姿轨控分系统设计
# 姿轨控分系统设计 为构建空间卫星的稳定性和精度,姿轨控分系统设计关键。该PPT着重介绍了 系统概述、姿态控制系统设计、轨道控制系统朝向,维持安定姿态,确保各项任务的执 行。
轨道控制系统
通过调整卫星轨道进行位置、速度的控制和调整。
姿态控制系统设计
2
控制器设计
省略构建合理的控制算法、设计复杂的控制律,保证轨道控制的精度和稳定性。
3
实验验证
通过仿真验证和实际测试,检验轨道控制的精度、误差较小、性能可靠。
整合测试
姿态控制
将姿态控制系统和轨道控制系统 合理整合,协调运行,确保正确 执行任务。
轨道控制
确保卫星在轨道上平稳运行,并 对其位置和速度进行精细调整。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2016/12/13
11
(3)太阳敏感器
利用太阳离地球近、亮度高、发光均匀性好等特性测量 太阳矢量在卫星本体坐标位置,用于卫星对日姿态确定,与 其他敏感器组合确定卫星三轴姿态,包括模拟式太阳敏感器和 数字式太阳敏感器。
模拟太敏
数字太敏
模拟太敏工作原理
太阳敏感器:太阳敏感器对太阳辐射敏感并借此获得航天 器相对于太阳的方位。太阳敏感器按照输出信号方式的不同, 还可分为模拟式和数字式两种基本类型。 模拟式太阳敏感器,例如自旋稳定卫星广泛使用V形缝式 太阳敏感器。它具有两条狭缝,其中一条缝与卫星自旋轴平 行,另一条缝倾斜一个角度,构成V型。每条缝的后面装有 硅光电池。 数字太阳敏感器,用于三轴稳定的航天器的姿态测量, 是由狭缝和码盘组成。使用时都采用编码方式。其测量精度 可以达到0.10(测量角为640)和0.050(测量角为320).数字太 阳敏感器的模型。
姿态控制算法
ω
推力器相平面控制
I ω2 V ω1 II α1 III VI VII α2 IV α
ω1x
ω2 x
ωbix
推力器继电特性
V
ω0
TC K p Aerr Kd ωerr
反作用轮PD控制器
VIII
姿态控制算法
TC K p e Kd e K i edt
比例:提高精度和响应时间 微分:阻尼,影响超调量 积分:消除静差
2016/12/13
17
6.3常用执行器和执行器选择
• (1)反作用飞轮 控制力矩小,精度高。 • (2)推力器 控制力大,常用轨控。 • (3)磁力矩器 控制力矩小,与地磁场作用产生控制力矩,常用 反作用飞轮卸载。
控制系统的执行机构:推力器:冷气(氮气)系统和肼系 统、偏置动量轮加磁控(磁力矩器)、零动量控制(反作用 飞轮)。作为长寿命卫星,一般情况下使用反作用飞轮或者 偏置动量轮加磁控(磁力矩器)。肼系统是在遇到比较大的 扰动才使用,如航天器入轨和大的活动部件的展开等情况。 航天器在轨道上基本上是用轮控的途径实现控制。 中心计算机是根据敏感器测量的信息,对信息进行处理后, 按照给定的控制规律产生或发出控制指令,
计算各轴上磁力矩器控制力矩Tmi在 ΔH上投影大小ΔTmi
H Tmi Tmi Tmi cos arccos | H || T mi |
ΔTmi最大的2轴的磁力矩器工 作,该轴控制指令为Mci,其他轴不 工作,控制指令为0。
输出磁力矩器 三轴控制指令
④ 对系统可能出现的故障及排除故障的对策进行模拟研究;
⑤ 验证星载计算机数据处理能力和对姿轨控支持功能; ⑥ 验证敏感器和执行机构数学模型正确性; ⑦ 验证在不同工作模式下姿轨控分系统单机协同工作的匹配性; ⑧ 进行姿轨控分系统模飞;
⑨ 找出设计缺陷,确定技术状态。
(4)单机精度测试与标定
① 陀螺性能测试: 测量范围、测量精度、常值漂移、零偏重复性、零偏稳定 性、标度因数、标度因数重复性、标度因数随温度变化、零偏 随温度变化等。
磁力矩器卸载算法
开始
卸载 模式 01 飞轮转速 飞轮使用 状态 本体系磁 场强度
计算每个飞轮角动量 h=JΩ
确定飞轮标称 角动量H
计算每个飞轮需要卸载 角动量,对于不使用飞 轮需要卸载角动量为0
|ΔHi|>k1或 K1>|ΔHi|>k2
是
否
Δhi=Hi-hi
Δhi=0
Hi
Hi k1
Hi k2
(2)地球敏感器
通过敏感地球目标的自身红外辐射实现卫星滚 动和俯仰角姿态的测量,与其它敏感器组合测量偏 航姿态。通过敏感地球目标的
红外地球敏感器工作原理 静态红外地球敏感器
红外地球敏感器 地球敏感器有地球反照敏感器和红外地球敏感器,地球 反照敏感器在航天器控制系统中应用比较少,而红外地球敏 感器在航天器的姿态控制系统的姿态测量中,得到广泛应用。 红外地球敏感器是对地球辐射的红外敏感,并借此获得航天 器相对于地球的姿态信息。红外地球敏感器广泛采用二氧化 碳的吸收带(波段为14~16微米)的工作波段,可以较为稳 定地确定地球轮廓和辐射强度。红外地球敏感器由光学系统、 探测器和处理电路组成。
CCD星敏感器
星敏感器 星敏感器是对恒星辐射敏感,并借此获得航天器相对于 地球的姿态信息的光学敏感器。它是通过对恒星辐射的敏感 来测量后天器中某一个基准轴与已知恒星的视线之间的夹角, 由于恒星远离地球和航天器,故恒星的张角非常小 (0.04~0.005 ),因此星敏感器测量精度很高,比太阳敏感 器高一个数量级,适用于航天器的高精度姿态控制。星敏感 器分为星图仪和星跟踪器。
敏感器选择根据指标要求、定姿模式以及运行 轨道确定。
敏感器误差 定姿误差 姿 控 系 统 误 差 控制误差 定姿算法误差 其它误差
执行器误差 控制器误差 动力学及其它误差
(1)磁强计
磁强计是以地球磁场为基准,测量航天器姿态的敏感器。
磁强计本身是用来测量空间环境中磁场强度的。由于地球周 围每一点的磁场强度都可以由地球磁场模型事先确定,因此 利用航天器上的磁强计测得的信息与之对比便可以确定出航 天器相对于地球磁场的姿态。与其它敏感器组合定姿,适用 于低轨卫星。
2016/12/13
19
(1)反作用飞轮
• 根据“动量矩守恒”原理,改变安装在航天器上的高速旋 转刚体的动量矩,从而产生与刚体动量矩变化率成正比的 控制力矩,作用于航天器上使其动量矩相应变化,这种过 程称为动量交换。实现这种动量交换的装置称为飞轮或飞 轮执行机构,飞轮执行机构只能用于航天器的姿态控制。
反作用飞轮
(2)推进组件
根据牛顿第二定律,利用质量喷射排出,产生反作用推力, 这也正是这种装置被称为推力器或喷气执行机构的原因。当 推力器安装使得推力方向通过航天器质心,则成为轨道控制 执行机构;而当推力方向不过质心,则必然产生相对航天器 质心的力矩,成为姿态控制执行机构。
质量排出型推力器
(3)磁力矩器
6.5地面试验验证方案
①数学仿真试验; ②星载控制器闭环试验;
③半物理仿真试验。
(1)数学仿真试验
①分系统方案正确性; ②各种定姿和控制算法是否满足指标要求; ③故障及排除故障的对策模拟研究; ④敏感器和执行机构数学模型正确性; ⑤在不同工作模式单机协同工作的匹配性,模式切换正确 性和合理性;
⑥找出设计缺陷,为后续工作提出优化方案。
磁力矩器就是通电线圈,通电线圈产生的磁矩与地 球磁场相互作用就可产生控制力矩,实现姿态控制。当 两者互相垂直时,磁力矩最大;当两者相互平行时,磁 力矩为零。
磁力矩器
6.4定姿和控制算法
敏感器组合完成姿态确定方案 ①太敏+地敏+陀螺;
②太敏+磁强计+陀螺;
③星敏感器+陀螺
④地敏+磁强计+陀螺
双矢量定姿
(2)星载控制器闭环试验
①验证星载计算机运算处理能力; ②与数学仿真结果比对,优化控制器参数; ③找出设计缺陷,为后续工作提出优化方案。
(3) 半物理仿真试验
① 姿轨控分系统方案正确性; ② 验证单机闭环后算法和姿轨控分系统各项功能和性能指标; ③ 对单机产品进行闭路检验,考核单机接口、功能和性能指标;
2016/12/13
9
穿越式红外地球敏感器,它的视场对地球作扫描运动,当 视场扫过地平时,感受到的红外辐射功率发生剧烈的变化, 发生变化时的扫描角(运动部分绕扫描轴的转角)是姿态的 函数。在自旋稳定的航天器上安装一种借助于航天器的自旋 的地球进行扫描的穿越式的红外地球敏感器。 辐射平衡式红外地球敏感器,对地球边缘某些地区的辐射 敏感并加以比较,以获得姿态信息。它没有活动部件,因此 常常称为静态红外地球敏感器。有一种最简单的静态红外地 球敏感器,能同时感受地球边缘4个区域的红外辐射。
Hi k1
Hi k2
计算合成卸载角动量 ΔH=Cw*Δh
hi
否
计算磁力矩器加电方向 M c Ssgn ( B H )
否
|ΔH|<0.001
是
B和ΔH夹角大于45º 且小于135º
是
三轴控制指 令为0
反作用轮卸载
磁力矩器 三轴控制指令为零
计算各轴上磁力矩器按照加电方向 工作产生控制力矩Tmi,磁力矩器 异常产生控制力矩为零
• 测试系统功能
• 整星集成后关注事项
6.1 姿轨控分系统功能和组成
1)功能 完成卫星姿态和轨道控制,满足平台要求和载荷对 姿态和轨道的要求 。 2)系统组成 敏感器 、执行器和控制器三部分组成。
干扰力矩 目标姿态 + - 确定 姿态 姿态确定算法 姿态敏感器 控制器 控制器输出 控制指令分配 执行机构 + + 姿态动力学 和运动学 真实姿态
双 轴 数 控 高 精 度 转 台
精太阳敏感器
太 阳 模 拟 光 源
1级平台
(7) 单机精度测试与标定
第八讲 姿轨控分系统设计2
主要内容
• 几个概念 • 姿轨控分系统功能 • 姿态和轨道动力学基础 • 航天器常用几种轨道 • 姿态运动学和动力学 • 姿轨控方案要求和类型
姿轨控系统的组成
常用敏感器和敏感器选择
• 常用执行器和执行器选择 • 姿态确定和控制算法
• 地面仿真试验验证
• 仿真试验阶段划分 • 测试系统组成
2016/12/13
15
(5)陀螺
星上唯一测量卫星惯性姿态角速度敏感器。 种类:动调陀螺、液浮陀螺、光纤陀螺等。
光纤陀螺优点:精度高,且零偏随温度变化小。
光纤陀螺
惯性敏感器(陀螺仪): 惯性敏感器是利用惯性原理工作的,它有两个重要特性: 定轴性:其高速旋转的转子具有力图保持其旋转轴在惯性空 间内的方向稳定不变的特性;转子角动量即矢量H是绕自旋 轴的转动惯量J和自旋角速度的乘积(H=J)。进动性:在外力 矩作用下,旋转的转子力图使其旋转轴沿最短的路径趋向外 力矩的作用方向。干扰力矩引起转子进动角速度称为陀螺的 漂移率。惯性敏感器有滚珠轴承自由陀螺仪、液浮陀螺仪、 静电陀螺仪、挠性陀螺仪、激光陀螺仪以及逐渐成为实用的 光导纤维陀螺仪。液浮速率积分陀螺组件,测量范围为40/s, 随机漂移0.30/h(1 )。