基于Matlab和ADMAS的四杆机构运动仿真
基于ADAMS的机械四连杆机构运动仿真分析

基于ADAMS的机械四连杆机构运动仿真分析1. 引言1.1 背景介绍机械四连杆机构是一种常见的机械系统,由四个连杆组成,通过铰链连接在一起。
该机构具有简单结构、运动灵活等特点,广泛应用于工程领域中的机械传动系统、转动机械装置等。
随着现代工程技术的发展,人们对机械四连杆机构的运动性能和工作特性提出了更高的要求。
利用ADAMS软件进行机械四连杆机构的运动仿真分析已成为一种常用的研究方法。
通过仿真分析,可以全面地了解机构在不同工况下的运动规律和性能特点,为设计优化和故障分析提供重要依据。
1.2 研究目的本文旨在利用ADAMS软件对机械四连杆机构进行运动仿真分析,探讨其运动规律及特性。
通过建立机构的数学模型,模拟机构在不同工况下的运动状态,分析机构的运动学性能和动力学特性,为设计优化提供理论支持。
借助ADAMS软件的功能,对机构进行参数优化,使机构的性能达到最佳状态。
本文研究的目的包括:1. 分析机械四连杆机构的运动规律,揭示其运动特性;2. 探讨机构在不同工况下的运动状态和特点,评估机构的性能;3. 基于仿真结果,进行参数优化,提高机构的工作效率和稳定性;4. 对机构可能出现的故障进行分析,为机构的维护和保养提供参考。
通过对机械四连杆机构的运动仿真分析,旨在为机械工程师提供设计和优化机构的参考,促进机械系统的创新和发展。
1.3 研究方法研究方法是本文的关键部分,主要包括以下几个步骤:(1)了解ADAMS软件的基本原理和使用方法,包括建模、设置参数、运动仿真等操作。
(2)建立四连杆机构的三维模型,并根据实际情况设置各个连杆的长度、质量、摩擦系数等参数。
(3)设定机构的初始条件和约束条件,如应用驱动力、初始速度、固定关节等,以模拟机构的运动过程。
(4)进行仿真分析,观察四连杆机构在不同驱动力、摩擦系数下的运动情况,包括角速度、位移、加速度等参数的变化。
(5)分析和比较仿真结果,探讨四连杆机构运动特性的影响因素,如摩擦力、驱动力大小、连杆长度等,并对结果进行合理解释。
基于MATLAB与ADAMS的四杆机构优化设计与仿真
基于MATLAB与ADAMS的四杆机构优化设计与仿真陈晃;胡元洲;成相宜【期刊名称】《中国机械》【年(卷),期】2014(000)013【摘要】以平面四杆机构为研究对象,为了得到符合预定轨迹且杆长最短的四杆机构,运用MATLAB建立模型并对其进行优化设计,得到各杆长的最优解。
在最优解的基础上,对结果进行ADAMS仿真,进一步确定优化结果,使四杆机构能在质量最轻、结构最紧凑的情况下得到规定的轨迹。
%As the research object with the planar four bar mechanism, in order to obtain a planar four bar mechanism that meet the trajectory requirement and keep the length shortest, MATLAB was investigated to establish the model of the four bar mechanism and optimize the design, to obtain the optimum solution of the length of each bar. Based on the optimum solution, use ADAMS to simulate the result to further determine the solution, in order to make sure the four bar mechanism could be got in a required trajectory with the lightest weigh and the most compact structure.【总页数】2页(P201-202)【作者】陈晃;胡元洲;成相宜【作者单位】100083中国矿业大学北京机电与信息工程学院北京;100083中国矿业大学北京机电与信息工程学院北京;100083中国矿业大学北京机电与信息工程学院北京【正文语种】中文【相关文献】1.基于MATLAB工具箱四杆机构优化设计2.基于ADAMS软件的啤酒瓶装箱机双四杆机构的运动仿真优化3.基于MATLAB和Pro/E的四杆机构多目标优化设计4.基于图谱法和Matlab的椭圆跑步机四杆机构的设计与仿真5.基于Matlab的四杆机构优化设计简介因版权原因,仅展示原文概要,查看原文内容请购买。
基于ADAMS的机械四连杆机构运动仿真分析

基于ADAMS的机械四连杆机构运动仿真分析机械四连杆机构是一种常用的机构形式,它广泛应用于各种机械设备中,如汽车发动机、机床、机器人和机械手等。
本文基于ADAMS软件,对机械四连杆机构进行运动仿真分析,并对仿真结果进行分析和讨论。
一、ADAMS软件介绍ADAMS是一款专门用于多体动力学仿真分析的商业软件,它可以用来仿真各种机械系统的动力学特性,包括车辆、飞机、机器人以及各种机械机构等,还可以分析机构的运动轨迹、速度、加速度、力矩等参数。
在本文中,我们将利用ADAMS软件对机械四连杆机构进行仿真分析,探究机构的运动规律和特性。
二、机械四连杆机构的结构和运动特性机械四连杆机构由四个连杆组成,其中两个连杆为机构的输入和输出轴,另外两个连杆则起到连接作用。
机构的结构如图1所示。
图1 机械四连杆机构结构示意图机械四连杆机构的运动特性与其连杆长度、角度以及连接方式等因素密切相关,下面我们将对机构的运动特性进行详细的分析。
1. 运动自由度机械四连杆机构的运动自由度为1,即只有一维平动或旋转方向。
2. 平衡性机械四连杆机构具有良好的平衡性,可以在很大程度上减小机构的惯性力,提高机构的稳定性。
3. 运动规律机械四连杆机构的运动规律比较复杂,难以用解析方法进行求解。
通常采用动力学仿真和实验方法,对机构的运动规律进行研究和分析。
为了探究机械四连杆机构的运动规律和特性,我们利用ADAMS软件对机构进行仿真分析。
仿真模型如图2所示。
在仿真过程中,我们可以通过改变机构的输入参数,如连杆长度、连杆角度等,来观察机构的运动规律和特性。
下面我们将举例说明。
1. 连杆长度变化时机构的运动规律改变机构的输入连杆长度,可以观察到机构的运动规律发生了显著的变化。
当输入连杆长度L1=100mm、L2=200mm时,机构的运动规律如图3所示。
图3 机构运动规律图(L1=100mm、L2=200mm)从图3中可以看出,当输入连杆开始旋转时,机构的输出连杆也随之旋转,但是旋转速度比输入连杆慢,这是由于机构的连杆长度不同,导致机构的角度运动不同所致。
基于VB和ADAMS的平面四杆机构连杆曲线的仿真与分析
口 段守 勇 口 孙 涛 口
上海
丁
泽
上海大学 机 电工程与 自动化学 院
摘
20 7 002
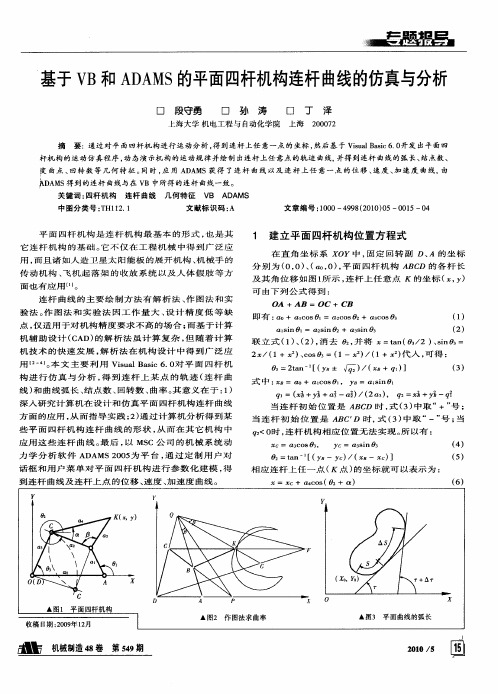
要 :通 过 对 平 面 四 杆机 构 进 行 运 动 分 析 , 到 连 杆 上 任 意 一 点 的 坐 标 , 得 然后 基 于 Vsa B s . 开 发 出平 面 四 i l ai6 0 u c
机 辅 助 设 计 ( Ao) 解 析 法 虽 计 算 复 杂 , 随 着 计 算 c 的 但
即 有 : 0 口 c 8 1 0C S 2 口 c 8 3 口 + lo 0 = 2O 0 + 3o 0
。 sn0 = a sn 2 口 sn0 li 1 2i 0 + 3i 3
() 1
() 2
可 由下列公 式 得到 :
0. + A B = 0 C + CB 4
连杆 曲线 的主 要绘 制 方法 有 解 析法 、 图法 和实 作 验 法 。 图 法 和实 验 法 因工 作 量 大 、 计 精 度低 等 缺 作 设 点 , 适 用于对 机构 精度 要求 不高 的场 合 ; 基 于计算 仅 而
机 技术 的 快速 发展 , 析法 在 机构 设 计 中得 到 广泛 应 解
用 一1本 文 主 要 利 用 Vi a B sc6 0 平 面 四 杆 机 。, 到 连 杆 上 某 点 的 轨 迹 ( 杆 曲 得 连 线 ) 曲线 弧 长 、 点 数 、 转 数 、 率 。 意 义 在 于 : ) 和 结 回 曲 其 1 深 入 研 究 计 算 机 在 设 计 和 仿 真 平 面 四杆 机 构 连 杆 曲 线 方 面 的 应 用 , 而 指 导 实 践 ; ) 过 计 算 机 分 析 得 到 某 从 2通
基于MATLAB的平面四连杆机构运动仿真

12端 点 B运 动分析 .
在 复 数 坐标 系 中 ,端 点 B的位 置 可 表 示 为 B ri,则 =2 ̄ e2
6
』Brn02 I =c2 I 2si O R 2s e o mB=r
速度分别为 :
( 5 ) 一
。
4
2
分 别 对 上 式 求 一 次 、二 次 导 数 ,得 到 B点 的 速 度 、加
[ ] 孙 桓 , 陈作 模 . 械 原 理 [ ] . 京 : 高 等 教 育 出版 社 1 机 M 北
2 0 . 0 6
( 转第 8 下 4页 )
1 00
5 0
>
一
5 0
。
10 0
图 4 交 替 反相 层 叠 下 相 电 压 波形 及 对 应 频谱
1 0. 0 0
lve i v re sa d DTC o rd v p lc t n .I E a so e l n etr n mo r e a p i ai s EE Tr n n i o
[ ] 刘风 君 ,多 电平 逆 变技 术及 其 应 用 [ ] , 京 :机 械 工 业 出 4 M 北
1 00 0 .
8 . 0O
.
5 0 0.
≮ 0
一
S O 0.
一
1 0. 0 0 0
^ 1 j f
1 0 2 0 0. 0. 3 0 400 0. . 500 6 0 . 0。
越
0 20 . 40 . 60 . 80 . 1 0 0.
t / ms
0
~
.
ll1 斟 s2 v t c西 m o2 B j
l 『 Is 一s i I 一 c ].∞ o h1 I l +s c o j
基于MATLAB的平面四连杆机构运动仿真.
图2~4分别为θ4角速度、点C的速度变化曲线。
4结论
本文在复数向量坐标系中推导了四连杆机构运动方程,并应用MATLAB软件进行了连杆机构运动数值仿真。从计算结果可以看出,该方法可以方便快捷地得到连杆运动参数,能够有效提高分析效率和计算精度,可进一步推广到多连杆机构设计及优化计算中。
文章编号:1009-9492(201104-0051-02
引言
四连杆机构因其结构灵活、能够传递动力并有效地实现预定动作,在很多领域得到了广泛应用
[1]
。进行连杆机
构运动分析,传统方法主要是图解法或分析法[2]
,无论设
计精度还是设计效率都相对低下,无法满足现代机械高速高精度的要求。随着计算机技术的飞速发展,特别是以
面四杆机构[J ].机械制造, 2002,
(3:26-28.
[3]周进雄,张陵.机构动态仿真[M ].西安:西安交通大学出
版社, 2002.
[4]李娟玲,张建峰.基于C语言的平面连杆机构的运动分析
[J ].机械研究与应用, 2006, 19(5:117-120.
[5]宋兆基. MATLAB6.5在科学计算中的应用[M ].北京:清
华大学出版社, 2005.
[6]王正林.精通MATLAB科学计算[M ].北京:电子工业出
版社, 2009.
[7]曹惟庆.机构设计[M ].北京:机械工业出版社, 2004. [8]李洪涛,徐巍华.基于MATLAB软件对抽油机连杆运动规律
的仿真研究[J ].机械工程师, 2009(5:99-101.
参考文献:
[1]孙桓,陈作模.机械原理[M ].北京:高等教育出版社,
2006.
基于ADAMS的机械四连杆机构运动仿真分析

基于ADAMS的机械四连杆机构运动仿真分析1.引言机械四连杆机构是一种常见的机械结构,它由四个连杆组成,通过转动连接在一起,能够实现复杂的运动。
对于这种机构的运动行为进行仿真分析,可以帮助工程师们更好地理解其工作原理和性能特点,为设计优化和控制提供可靠的理论基础。
本文将介绍基于ADAMS的机械四连杆机构运动仿真分析的方法和结果,以期为相关领域的研究和应用提供参考。
2.问题描述机械四连杆机构的运动仿真分析主要涉及以下几个问题:首先是机构的运动学特性,包括连杆的运动轨迹、角度、速度和加速度等;其次是机构的力学特性,包括连杆的受力情况、驱动力和阻力等;最后是机构的动力学特性,包括连杆的动力学模型、运动过程中的能量转换和损耗等。
通过分析这些问题,可以全面了解机械四连杆机构的运动规律和工作性能,为相关工程设计和控制优化提供重要参考。
3.基于ADAMS的机械四连杆机构运动仿真分析方法ADAMS(Adams Dynamics)是一款专业的多体动力学仿真软件,可以对多体机械系统的运动行为进行模拟和分析。
基于ADAMS的机械四连杆机构运动仿真分析主要包括以下几个步骤:建立模型、设定运动和约束条件、进行仿真计算、分析结果并优化设计。
3.1 建立模型首先需要在ADAMS软件中建立机械四连杆机构的三维模型,包括连杆、连接点、驱动装置等。
通过软件提供的建模工具,可以简单快速地绘制出机构的几何结构,并添加材料、质量、惯性等物理属性,为后续的仿真计算做好准备。
3.2 设定运动和约束条件在建立好模型后,需要设定机械四连杆机构的运动和约束条件。
通过ADAMS软件提供的运动学分析工具,可以简单地定义连杆的转动角度、线速度和角速度等运动参数,同时添加约束条件,限制机构的运动范围和姿态,以保证仿真计算的准确性和可靠性。
3.3 进行仿真计算设定好运动和约束条件后,即可进行仿真计算。
ADAMS软件提供了理想化模拟和实验数据验证两种仿真方式,可以根据需求选择合适的方法进行计算。
基于matlab的平面四连杆机构设计以及该机构的运动分析参考模板
基于matlab的平面四连杆机构设计以及该机构的运动仿真分析摘要四连杆机构因其结构方便灵活,能够传递动力并实现多种运动形式而被广泛应用于各个领域,因此对其进行运动分析具有重要的意义。
传统的分析方法主要应用几何综合法和解析综合法,几何综合法简单直观,但是精确度较低;解析法精确度较高,但是计算工作量大。
随着计算机辅助数值解法的发展,特别是MATLAB软件的引入,解析法已经得到了广泛的应用。
对于四连杆的运动分析,若应用MATLAB 则需要大量的编程,因此我们引入proe软件,我们不仅可以在此软件中建立实物图,而且还可以对其进行运动仿真并对其运动分析。
在设计四连杆时,我们利用解析综合法建立数学模型,再根据数学模型在MATLAB中编程可以求得其他杆件的长度。
针对范例中所求得的各连杆的长度,我们在proe软件中画出其三维图(如图4)并在proe软件中进行仿真分析得出CB,的角加速度的变化,从而得到CB,两接触处所受到的力是成周期性变化的,可以看出CB,两点处的疲劳断裂,我们提B,两点处极易疲劳断裂,针对C出了在设计四连杆中的一些建议。
关键字:解析法 MATLAB 软件 proe 软件 运动仿真建立用解析法设计平面四杆机构模型对于问题中所给出的连架杆AB 的三个位置与连架杆CD 的三个位置相对应,即三组对应位置为:332211,,,,,ψϕψϕψϕ,其中他们对应的值分别为: 52,45,82,90,112,135,为了便于写代数式,可作出AB 与CD 对应的关系,其图如下:图—2 AB 与CD 三个位置对应的关系通过上图我们可以通过建立平面直角坐标系并利用解析法来求解,其直角坐标系图如下:φααi θi φi图—3 平面机构直角坐标系通过建立直角坐标系OXY ,如上图所示,其中0α与0φ为AB 杆与CD 杆的初始角,各杆件的长度分别用矢量d c b a ,,,,表示,将各矢量分别在X 轴与Y 轴上投影的方程为⎩⎨⎧=++=+)sin(*)sin(*)sin(*)cos(*)cos(*)cos(*φθαφθαc b a c d b a在上述的方程中我们可以消除θ,从而可以得到α与φ之间的关系如下:)cos(2)cos(2)cos(2)(2222αφαφab ac cd b d c a +-=+-++ (1) 为便于化简以及matlab 编程我们可以令:⎪⎪⎪⎩⎪⎪⎪⎨⎧==-++=c d H a d H ac b d c a H 32222212 (2) 通过将(2)式代入(1)式中则可以化简得到如下等式: )cos()cos()cos(321αφαφH H H +-=+ (3)我们可以通过(3)式将两连架杆对应的位置带入(3)式中,我们可以得到如下方程:⎪⎩⎪⎨⎧+-=++-=++-=+)cos()cos()cos()cos()cos()cos()cos()cos()cos(333332123222211311121ϕψϕψϕψϕψϕψϕψH H H H H H H H H (4) 联立(4)方程组我们可以求得321,,H H H ,再根据(2)中的条件以及所给定的机架d 的长度,我们可以求出其它杆件的长度为:⎪⎪⎪⎩⎪⎪⎪⎨⎧-++===1222322acH d c a b H d c H d a (5)四连杆设计范例:在日常生活中,我们经常看到消防门总能自动关上,其实它是利用四连杆机构与弹簧组成的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 M alb程 序 设 计 t a
当数 学 模 型 完 成 后 , 接 着 我 们 在 M 文 件 中 来 编 写 紧
() 2
则 A(C在 任 意 时刻 的 角度 为 : )
t ,一 td g , e / 8 1O
程 序 实 现平 面 四杆 机 构 的 运 动 轨 迹 仿 真 。
籀l卷 第9 O 划
2 1} 月 01 ‘ 9
软 件 导 刊
Sofw a eGui e t r d
Voll 0 9 0N Se . 0 1 p 2 l
基 于 Ma ta lb和 AD MAS 的 四杆 机 构 运 动 仿 真
周 展 张 钢 。 林 富 生 , ,
( ) 义 已 知 常 量 1定
1 — 20 m; 1 9r a
1 — 1O m : 2 lm 1 — 2O m : 3 5m 1 — 20 m: 4 4 r a
w 2= 2 p : 0 i
图 l 四 杆机 构 模 型
其 中 为 任 意 时刻 的 AOC的 弧 度 , 已知 常 量 。 是
1 3 AF、 一 AC b a O、 一 AC e AC, B、 — AD、 DC、 O 的 杆 C
由 此 可 得 任 意 时 刻 a点 的 运 动 轨 迹 坐 标 为 ( x a ) a ,y , 其中 :
a r 2* c s t ) o ( 2
a 一 r 2*s n( 2 i t)
(. 1 武汉 纺 织 大学 机 电工程 与 自动 化 学院 , 北 武汉 4 0 7 ; . 迪 电器 , 湖 30 32 港 湖北 武 汉 4 0 7 ) 3 0 1
摘 要 : 链 四杆 机 构 是 机 械 设 备 中 最基 本 的 机 构 类 型 之 一 , 它为 研 究对 象 建 立数 学 模 型 , 用 MA B编 程 与 铰 以 应 TI A
任 意 时 刻 b点 的运 动 轨 迹 坐 标 为 ( x, y , 中 : b b )其
b = r 4*c (4 os t )+ r I
b : sn t ) i ( 4
长 分 别 为 r 、2 r 、4 如 图 1所 示 。 1 r 、3 r , 由原 动件 OA 以 n转 / i 速 度 匀 速 转 动 可 得 OA a r n的 的角 速 度 为 :
在 三 角 形 AOC中根 据 正 弦定 理得
sn a i ( )一 s (, i t)*r / n 2P
() 4
() 5
() 6
四朴 机 构 运 动轨 迹 仿 真 系 统 , 拟 四 杆 机 构 的 运 动 仿 真 , 模
在 三 角 形 AD 中根 据 正 弦定 理 得 C
sn 6 i ( )一 sn g i ( )*r / 3e
并 获得 各 点 的 运 动 轨 迹 坐 标 , 设 计 显 得 直 观 , 好 地 帮 使 更
助 了工 程 技 术人 员 在 机 构 分 析 与设 计 过 程 中 进 行 优 化 , 提
联 立 ( ) ( ) 即 可 解 得 a b g、2则 1 一 6式 、、 t
t 一 1 0 *d2 8 r~ a ~ b
第 9 期
f u e 5 i r( ) g p o ( x, y, lta a 一 );
周
展 , 富生 , 林 张
钢 : 于 Malb和 AD 基 t a MAS的 四杆 机 构 运 动 仿 真
v
;
,
() 3
a y一 ( 2 1 .* sn( h ); i t 2)
作 者 简 介 : 展 ( 9 7 ) 男 , 北 武 汉 人 , 汉 纺 织 大学 机 电 工程 与 自动 化 学 院 机 械 电子 工程 硕 士研 究 生 , 究方 向为 旋 转 机 械 故 障 周 18 一 , 湖 武 研
文 章 编 号 : 6 27 0 ( 0 1 0 — 1 20 1 7 — 8 0 2 1 ) 90 0 2 在 三 角形 ADC 中根 据 余 弦 定 理 得
0 引 言
本 文 以 MATI AB、 ADMAS为平 台 , 发 了 一 个 平 面 开
csg o( )一  ̄(; r~ ) 23 /r + i /r
t 一 3 t 4一 g
高 丫 T作 效 率 , 低 产 品 开 发 成 本 。 降
设 原 动 件 OA 以 n转 / i 速 度 匀 速 转 动 , 各 杆 a r n的 求
的 运 动 轨 迹 。将 平 面 四杆 机 构 看 成 一 个 封 闭 的 四边 形 , 连 接 OB、 AC相 交 于 E 点 , t : AOC、4 令 2 t 一 B D、3= C t
诊断; 张钢 ( 9 5 ) 男 , 北 鄂 州 人 , 迪 电 器职 员 , 究 方 向 为 机 械 设 计 制 造 ; 富 生 ( 9 5 ) 男 , 北 武 汉 人 , 汉 纺 18~ , 湖 港 研 林 16 一 , 湖 武 织 大 学 机 电 工 程 与 自动 化 学 院教 授 , 究方 向 为机 械 力 学 。 研
( ) 分 源程 序 如 下 : 2部 ds 面 四 杆 机 构 的 运 动 i 平 p
a x一 ( 2 *C S t 2) 1. O ( h );
在 i角 形 A C 中根 据 余 弦定 理 得 O
酬 -
、 r r 一 r l 2 o (2 / + ; 2 *r *c s t) ,
AD MAS建模 分 别 对 四 杆 机 构 进 行 仿 真 分 析 , 得 各 点 的 运 动 曲线 进 行 对 比 , 获 两种 方 法 各 有 所 长 , 析 结 果 显 示 直 观 。 分
关键词 : 四杆 机 构 ; 真 ; 动 仿 运
中 图分 类 号 : 3 1 9 TP 9 .
文献标识码 : A