摆动尖顶从动件盘形凸轮设计
第4.3节(盘形凸轮廓线的设计)
第三节 盘形凸轮廓线的设计当根据工作要求和结构条件选定了凸轮机构的类型、从动件的运动规律和凸轮的基圆半径(其确定将在下节中介绍)等结构参数后,就可以设计凸轮的轮廓曲线。
凸轮廓线的设计方法有图解法和解析法,其设计原理基本相同。
本节先简要介绍图解法,后重点介绍解析法设计凸轮廓线。
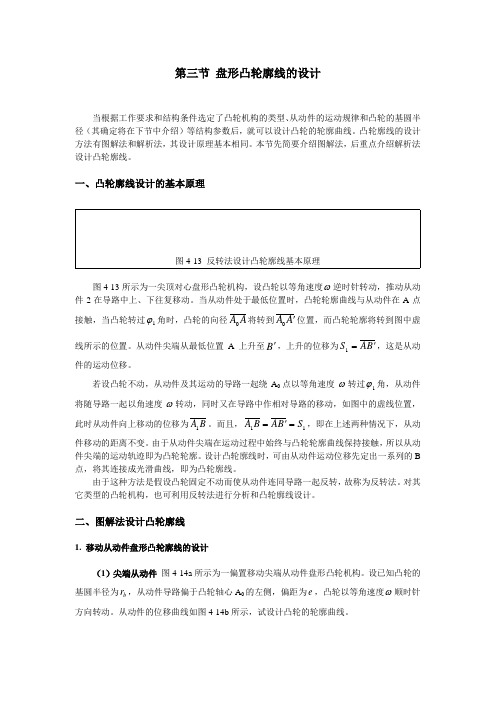
一、凸轮廓线设计的基本原理图4-13 反转法设计凸轮廓线基本原理图4-13所示为一尖顶对心盘形凸轮机构,设凸轮以等角速度ω逆时针转动,推动从动件2在导路中上、下往复移动。
当从动件处于最低位置时,凸轮轮廓曲线与从动件在A 点接触,当凸轮转过1ϕ角时,凸轮的向径A A 0将转到A A '0位置,而凸轮轮廓将转到图中虚线所示的位置。
从动件尖端从最低位置A 上升至B ',上升的位移为B A S '=1,这是从动件的运动位移。
若设凸轮不动,从动件及其运动的导路一起绕A 0点以等角速度-ω转过1ϕ角,从动件将随导路一起以角速度-ω转动,同时又在导路中作相对导路的移动,如图中的虚线位置,此时从动件向上移动的位移为B A 1。
而且,11S B A B A ='=,即在上述两种情况下,从动件移动的距离不变。
由于从动件尖端在运动过程中始终与凸轮轮廓曲线保持接触,所以从动件尖端的运动轨迹即为凸轮轮廓。
设计凸轮廓线时,可由从动件运动位移先定出一系列的B 点,将其连接成光滑曲线,即为凸轮廓线。
由于这种方法是假设凸轮固定不动而使从动件连同导路一起反转,故称为反转法。
对其它类型的凸轮机构,也可利用反转法进行分析和凸轮廓线设计。
二、图解法设计凸轮廓线1. 移动从动件盘形凸轮廓线的设计(1)尖端从动件 图4-14a 所示为一偏置移动尖端从动件盘形凸轮机构。
设已知凸轮的基圆半径为b r ,从动件导路偏于凸轮轴心A 0的左侧,偏距为e ,凸轮以等角速度ω顺时针方向转动。
从动件的位移曲线如图4-14b 所示,试设计凸轮的轮廓曲线。
图4-14 尖端从动件盘形凸轮廓线设计依据反转法原理,具体设计步骤如下。
机械设计教案:凸轮机构的认识与盘形凸轮轮廓的设计
授课教案No任务3.1 凸轮机构的认识一、复习10分钟复习上次课学习内容二、教师导课与课程学习:(1)学习提示,教师介绍本任务的学习内容。
15分钟本项目以直动从动件的盘形凸轮机构为例,在从动件等速运动、等加速等减速运动、余弦加速度运动(简谐运动)规律条件下,分析了凸轮机构中存在的柔性冲击与刚性冲击。
教师介绍本任务的学习内容:凸轮机构的分类;常用术语;从动件的运动规律;凸轮机构的结构形式;常用材料及热处理(2)分小组学习: 40分钟3.1.1常用设备中的凸轮机构1. 凸轮机构的组成如图所示的凸轮机构是由凸轮、从动件和机架等三个基本构件组成的机构。
2.凸轮机构应用实例自动钻床进给机构、冲床凸轮机构等。
3.1.2凸轮机构的分类凸轮机构的类型很多,按凸轮和从动件的形状及其运动形式的不同,凸轮机构的分类方法有以下几种:1.按凸轮形状分类(1)盘形凸轮(2)移动凸轮。
(3)圆柱凸轮2.按从动件形式分类(1)尖顶从动件(2)滚子从动件(3)平底从动件从动件的结构形式3.按从动件的运动形式分类学生发言汇报、记录学习笔记学生发言汇报并记录学习笔记阅读教材和PPT、分组讨论、撰写发言提纲、学生发言汇报,课,记录学习笔记No(1)直动从动件直动从动件指相对于机架作直线往复移动的从动件,如图3.1.1中所示。
直动从动件又分为对心直动从动件和偏置直动从动件。
(2)摆动从动件:绕某一固定转动中心摆动的从动件。
4.按凸轮与从动件的锁合方式分类 (1)力锁合利用从动件的重力、弹簧力或其他外力使从动件与凸轮轮廓保持接触,(2)形锁合利用从动件和凸轮特殊的几何形状来维持接触,例如圆柱凸轮机构是利用滚子与凸轮凹槽两侧面的配合来实现形锁合。
3.1.3凸轮机构的常用术语如下:1.凸轮基圆与基圆半径b r2.凸轮的转角δ凸轮相对于某一位置转过的角度,称为凸轮转角δ。
具体包括推程运动角0δ、远停程运动角S δ回程运动角0′δ和近停程运动角Sδ'。
MATLAB在摆动滚子从动件盘形凸轮机构设计中的应用

MATLAB在摆动滚子从动件盘形凸轮机构设计中的应用摘要:凸轮机构可以使从动件准确的实现某种预期的运动规律,它广泛的应用于自动机械、自动控制装置和装配生产线中。
本文将从凸轮机构的压力角及其基本尺寸的设计、从动件的运动规律、凸轮廓线的设计等方面介绍matlab在摆动滚子从动件盘形凸轮机构设计中的应用。
关键词:摆动滚子从动件盘形凸轮机构 matlabthe application of matlab in the oscillating roller follower disc cam mechanism designli hailong, luo fengming(southwest jiaotong university emei, le shan si chuan province ,614202)abstract:cam mechanism can make the follower accurately realize some expected movement which is widely used in automatic machinery, automatic control equipment and assembly production line. the article will introduce the application of matlab in the oscillating roller follower disc cam mechanism design from the pressure angle of cam and its basic size design, the motion law of the follower and cam profile design etc.key words: disk cam mechanism with oscillating roller follower;matlab1.问题的描述设计一个摆动滚子凸轮机构,要求导杆机构的最大压力角应为最小值;凸轮机构的最大压力角应在许用值[α]之内,摆动从动件的升、回程运动规律均为等加速等减速运动。
凸轮机构基本参数的设计
凸轮机构基本参数的设计前节所先容的几何法和解析法设计凸轮轮廓曲线,其基圆半径r0、直动从动件的偏距e或摆动从动件与凸轮的中心距a、滚子半径rT等基本参数都是预先给定的。
本节将从凸轮机构的传动效率、运动是否失真、结构是否紧凑等方面讨论上述参数的确定方法。
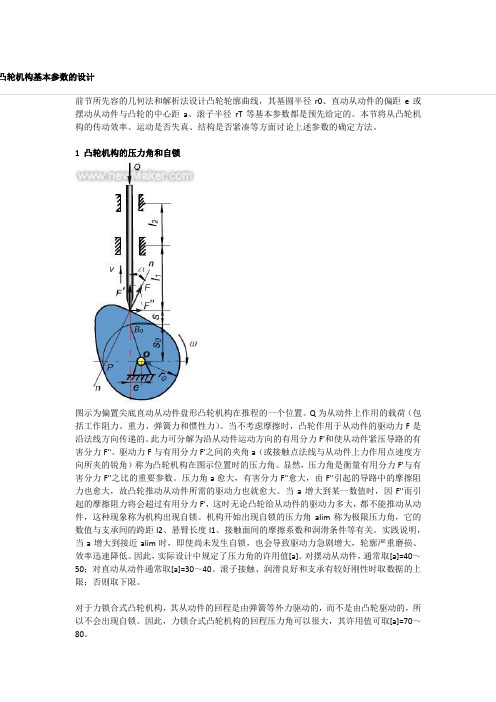
1 凸轮机构的压力角和自锁图示为偏置尖底直动从动件盘形凸轮机构在推程的一个位置。
Q为从动件上作用的载荷(包括工作阻力、重力、弹簧力和惯性力)。
当不考虑摩擦时,凸轮作用于从动件的驱动力F是沿法线方向传递的。
此力可分解为沿从动件运动方向的有用分力F'和使从动件紧压导路的有害分力F''。
驱动力F与有用分力F'之间的夹角a(或接触点法线与从动件上力作用点速度方向所夹的锐角)称为凸轮机构在图示位置时的压力角。
显然,压力角是衡量有用分力F'与有害分力F''之比的重要参数。
压力角a愈大,有害分力F''愈大,由F''引起的导路中的摩擦阻力也愈大,故凸轮推动从动件所需的驱动力也就愈大。
当a增大到某一数值时,因F''而引起的摩擦阻力将会超过有用分力F',这时无论凸轮给从动件的驱动力多大,都不能推动从动件,这种现象称为机构出现自锁。
机构开始出现自锁的压力角alim称为极限压力角,它的数值与支承间的跨距l2、悬臂长度l1、接触面间的摩擦系数和润滑条件等有关。
实践说明,当a增大到接近alim时,即使尚未发生自锁,也会导致驱动力急剧增大,轮廓严重磨损、效率迅速降低。
因此,实际设计中规定了压力角的许用值[a]。
对摆动从动件,通常取[a]=40~50;对直动从动件通常取[a]=30~40。
滚子接触、润滑良好和支承有较好刚性时取数据的上限;否则取下限。
对于力锁合式凸轮机构,其从动件的回程是由弹簧等外力驱动的,而不是由凸轮驱动的,所以不会出现自锁。
因此,力锁合式凸轮机构的回程压力角可以很大,其许用值可取[a]=70~80。
摆动从动件盘形凸轮机构设计基本参数
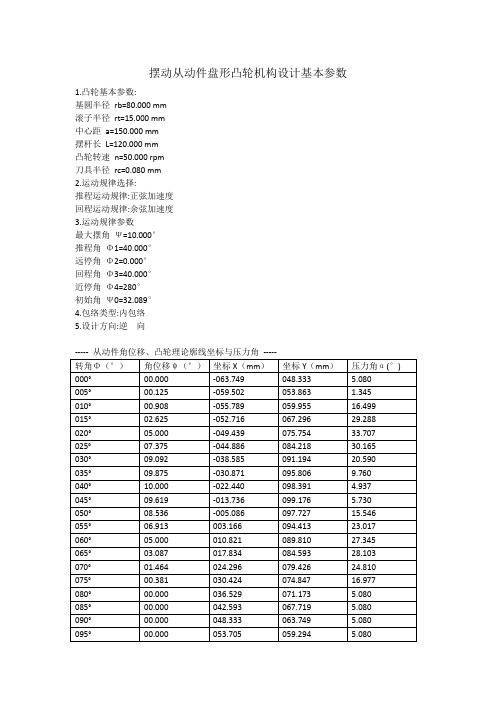
摆动从动件盘形凸轮机构设计基本参数
1.凸轮基本参数:
基圆半径rb=80.000 mm
滚子半径rt=15.000 mm
中心距a=150.000 mm
摆杆长L=120.000 mm
凸轮转速n=50.000 rpm
刀具半径rc=0.080 mm
2.运动规律选择:
推程运动规律:正弦加速度
回程运动规律:余弦加速度
3.运动规律参数
最大摆角Ψ=10.000°
推程角Φ1=40.000°
远停角Φ2=0.000°
回程角Φ3=40.000°
近停角Φ4=280°
初始角Ψ0=32.089°
4.包络类型:内包络
5.设计方向:逆向
推程最大压力角: 033.707 回程最大压力角: 028.257
-----参数说明-----
Φ-凸轮转角(°)
Xa、Ya-实际廓线坐标(mm)
ρb-理论廓线曲率半径(mm)
ρa-实际廓线曲率半径(mm)
曲率半径:“-”曲线外凸,“+”曲线内凹Xc、Yc-刀具中心轨迹坐标(mm)。
机械设计基础——凸轮机构

适用场合:中速、轻载。
A
B
t
S
t
a
t t
c).简谐运动规律(余弦加速度运动规律)
简谐运动:当一点在圆周上等速
运动时,它在直径上 的投影的运动.
运动特性:这种运动 规律的加速度在起点和终 点时有有限数值的突变, 故也有柔性冲击。
适用场合:中速、中载。
d).正弦加速度运动规律
——摆线运动规律
凸轮和滚子的工作表面要求:硬度高 耐磨 有足够接触强度
经常受冲击的:凸轮芯部有较强的韧性 凸轮材料:40Cr钢(表面淬火,HRC40~45) 20Cr、20CrMnTi(表面淬火,HRC56~62) 滚子材料:①20Cr钢(渗碳淬火,HRC56~62) ②用滚子轴承作为滚子
5.2 常用从动件运动规律
r0↑, α↓, 凸轮机构传力性能越好, 但机构不紧凑。
∴可通过增大基圆半径r0来获得较小的压力角α 。 根据结构条件→基圆半径r0
凸轮轴:r0略 r轴 单独凸轮:r0 ( 1.6 2)r轴
5.4.3 滚子半径的确定
设:滚子半径为rT ,理论廓线的曲率半径为ρ,
实际廓线的曲率半径为ρ’。
已知:基圆半径为r0, ω逆时针,推杆的运动规律如图所示。 设计:对心直动尖顶从动件盘形凸轮机构的凸轮廓线。
2.对心直动滚子从动件盘形凸轮机构
已知: 基圆半径为r0,滚子半径rT, ω逆时针。 推杆的运动规律如图所示。 设计:对心直动滚子从动件盘形凸轮机构的凸轮廓线。
3.对心直动平底从动件盘形凸轮机构
◆使凸轮机构具有良好的动力特性;
◆使所设计的凸轮便于加工。 2.根据工作条件确定从动件运动规律 (1)对无一定运动要求,只需对从动件工作行程有要求。
图解法设计凸轮轮廓

已知凸轮的基圆半径rmin,角速度ω、
e
从动件的运动规律和偏心距e,设计该
凸轮轮廓曲线。
8’ 7’ 5’ 3’ 1’
1 3 5 78
9’ 11’ 12’
13’ 14’
9 11 13 15
ωA
15’15 14’14
13’ 12’
13 12
11
10
kk9k1k0k1181kk21k73k14k6O1k55k4kk3k21
的距离d,摆杆角位移方程,设计该凸轮轮廓曲线。
4’ 3’ 2’ 1’
12 3 4
5’ 6’
7’
8’ 5 67 8
d A8
A7
A
l B’1 B B1
rminω1
A1-ω1
φ1
B’2 B’3φ2
A2
B2 B3
B’φ4 3
120°B4A3来自φ790 °B8 B7
60 B6
B’7
设计:潘存云
°B5
B’6
B’5
1 3 5 78
9’ 11’ 12’
13’ 14’
9 11 13 15
理论轮廓
ω
设计:潘存云
设计步骤:
实际轮廓
①选比例尺μl作基圆rmin。 ②反向等分各运动角。原则是:陡密缓疏。
③确定反转后从动件尖顶在各等份点的位置。
④将各尖顶点连接成一条光滑曲线。
⑤作各位置滚子圆的内(外)包络线。
ρa-工作轮廓的曲率半径,ρ-理论轮廓的曲率半径,
8’ 7’ 5’ 3’ 1’
1 3 5 78
9’10’ 11’ 12’
13’ 14’
9 11 13 15
-ω ω
设计:潘存云
机械原理 凸轮机构及其设计
第六讲凸轮机构及其设计(一)凸轮机构的应用和分类一、凸轮机构1.组成:凸轮,推杆,机架。
2.优点:只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,而且机构简单紧凑。
缺点:凸轮廓线与推杆之间为点、线接触,易磨损,所以凸轮机构多用在传力不大的场合。
二、凸轮机构的分类1.按凸轮的形状分:盘形凸轮圆柱凸轮2.按推杆的形状分尖顶推杆:结构简单,能与复杂的凸轮轮廓保持接触,实现任意预期运动。
易遭磨损,只适用于作用力不大和速度较低的场合滚子推杆:滚动摩擦力小,承载力大,可用于传递较大的动力。
不能与凹槽的凸轮轮廓时时处处保持接触。
平底推杆:不考虑摩擦时,凸轮对推杆的作用力与从动件平底垂直,受力平稳;易形成油膜,润滑好;效率高。
不能与凹槽的凸轮轮廓时时处处保持接触。
3.按从动件的运动形式分(1)往复直线运动:直动推杆,又有对心和偏心式两种。
(2)往复摆动运动:摆动推杆,也有对心和偏心式两种。
4.根据凸轮与推杆接触方法不同分:(1)力封闭的凸轮机构:通过其它外力(如重力,弹性力)使推杆始终与凸轮保持接触,(2)几何形状封闭的凸轮机构:利用凸轮或推杆的特殊几何结构使凸轮与推杆始终保持接触。
①等宽凸轮机构②等径凸轮机构③共轭凸轮(二)推杆的运动规律一、基本名词:以凸轮的回转轴心O为圆心,以凸轮的最小半径r为半径所作的圆称为凸轮的基圆,r称为基圆半径。
推程:当凸轮以角速度转动时,推杆被推到距凸轮转动中心最远的位置的过程称为推程。
推杆上升的最大距离称为推杆的行程,相应的凸轮转角称为推程运动角。
回程:推杆由最远位置回到起始位置的过程称为回程,对应的凸轮转角称为回程运动角。
休止:推杆处于静止不动的阶段。
推杆在最远处静止不动,对应的凸轮转角称为远休止角;推杆在最近处静止不动,对应的凸轮转角称为近休止角二、推杆常用的运动规律1.刚性冲击:推杆在运动开始和终止时,速度突变,加速度在理论上将出现瞬时的无穷大值,致使推杆产生非常大的惯性力,因而使凸轮受到极大冲击,这种冲击叫刚性冲击。