摆动从动件盘形凸轮
第4.3节(盘形凸轮廓线的设计)
第三节 盘形凸轮廓线的设计当根据工作要求和结构条件选定了凸轮机构的类型、从动件的运动规律和凸轮的基圆半径(其确定将在下节中介绍)等结构参数后,就可以设计凸轮的轮廓曲线。
凸轮廓线的设计方法有图解法和解析法,其设计原理基本相同。
本节先简要介绍图解法,后重点介绍解析法设计凸轮廓线。
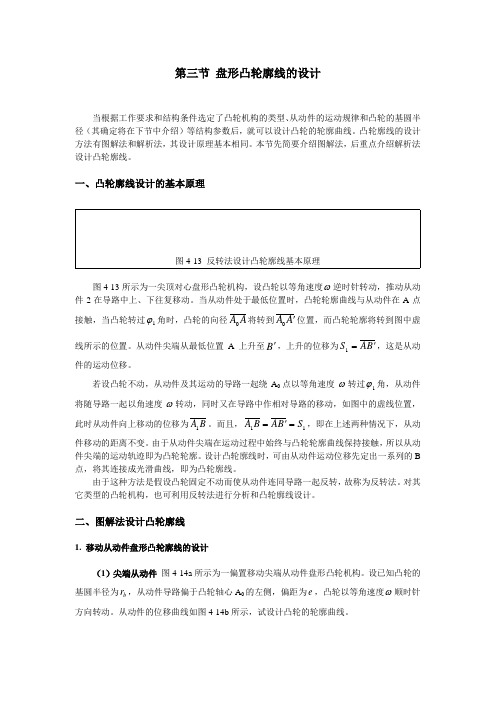
一、凸轮廓线设计的基本原理图4-13 反转法设计凸轮廓线基本原理图4-13所示为一尖顶对心盘形凸轮机构,设凸轮以等角速度ω逆时针转动,推动从动件2在导路中上、下往复移动。
当从动件处于最低位置时,凸轮轮廓曲线与从动件在A 点接触,当凸轮转过1ϕ角时,凸轮的向径A A 0将转到A A '0位置,而凸轮轮廓将转到图中虚线所示的位置。
从动件尖端从最低位置A 上升至B ',上升的位移为B A S '=1,这是从动件的运动位移。
若设凸轮不动,从动件及其运动的导路一起绕A 0点以等角速度-ω转过1ϕ角,从动件将随导路一起以角速度-ω转动,同时又在导路中作相对导路的移动,如图中的虚线位置,此时从动件向上移动的位移为B A 1。
而且,11S B A B A ='=,即在上述两种情况下,从动件移动的距离不变。
由于从动件尖端在运动过程中始终与凸轮轮廓曲线保持接触,所以从动件尖端的运动轨迹即为凸轮轮廓。
设计凸轮廓线时,可由从动件运动位移先定出一系列的B 点,将其连接成光滑曲线,即为凸轮廓线。
由于这种方法是假设凸轮固定不动而使从动件连同导路一起反转,故称为反转法。
对其它类型的凸轮机构,也可利用反转法进行分析和凸轮廓线设计。
二、图解法设计凸轮廓线1. 移动从动件盘形凸轮廓线的设计(1)尖端从动件 图4-14a 所示为一偏置移动尖端从动件盘形凸轮机构。
设已知凸轮的基圆半径为b r ,从动件导路偏于凸轮轴心A 0的左侧,偏距为e ,凸轮以等角速度ω顺时针方向转动。
从动件的位移曲线如图4-14b 所示,试设计凸轮的轮廓曲线。
图4-14 尖端从动件盘形凸轮廓线设计依据反转法原理,具体设计步骤如下。
摆动滚子从动件盘形凸轮机构设计的解析法

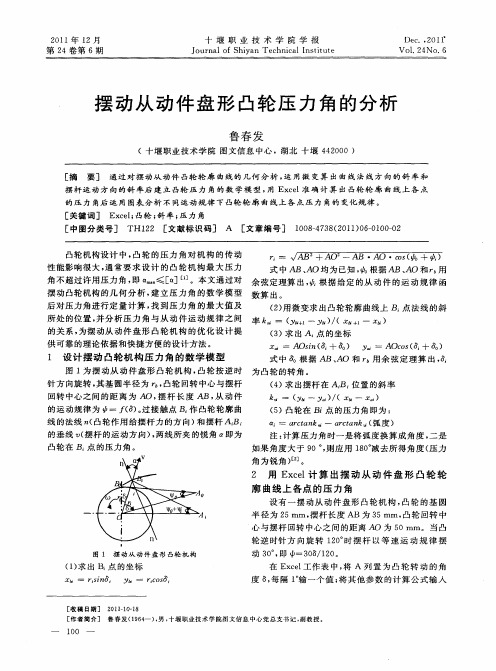
摆动滚子从动件盘形凸轮机构设计的解析法①0前言摆动滚子从动件盘形凸轮机构的设计主要包括基本尺寸的确定[ 1 ]和凸轮轮廓的设计. 基本尺寸主要是根据压力角确定的, 凸轮轮廓是根据基本尺寸和从动件的运动规律设计的. 过去这两部分的设计常常采用图解法, 虽然图解法简单、直观, 但精度低, 随着计算机技术的发展和数控机床的普及, 凸轮机构设计的解析法[ 2 ]正逐步取代传统的图解法.图1摆动从动件盘形凸轮机构的压力角1机构压力角的计算如图1 所示, 为摆动从动件盘形凸轮机构的压力角示意图. 摆杆长度O 2A = l, 机架长O 1O 2 = a.过瞬心P 作摆杆O 2A 的垂直线, 交O 2A延长线于B 点. 则有:tan A= BAPB=O 2P cos (W0 + W) - lO 2P sin (W0 + W)P 点为机构的瞬心, 则有: X1O 1P = X2O 2PX2X1=O 1PO 2P=d Wd U=O 1PO 1P + a∴O 1P =d Wd U a1 -d Wd UO 2P = O 1P + a = a1 -d Wd U∴tan A=a cos (W0 + W) - l (1 -d Wd U)a sin (W0 + W)上式是按X1 和X2 同向推出的, 否则tan A=a cos(W0 + W) - l (1 +d Wd U)a sin (W0 + W)工程设计中, 必须对凸轮机构的最大压力角加以限制, 凸轮机构的最大压力角应小于许用压力角.2机构基本尺寸的确定图2确定基本尺寸示意图2. 1基本尺寸确定的方法图2 中O 2 为摆杆的回转中心,A 为滚子摆杆的滚子中心. A 0 到A 6 为按给定运动规律W= f (U) 作出的摆杆各个位置, 位置个数可任选. 在摆杆的每位置上截取长为ld Wd U,其中l 为摆杆长, W为摆杆摆角, U为凸轮转角.截取方法为: 若摆杆与凸轮转向相同, 由A 点向着回转中心O 2 取; 若摆杆与凸轮转向相反, 由A 点背着回转中心O 2 取.图2 中凸轮与摆杆的相对转动关系为: 凸轮逆时针转,摆杆推程逆时针转, 回程顺时针转. 若推程许用压力角为[A], 回程许用压力角为[A′], 线段A 1a1,A 2a2, ⋯为对应推程截取的; 线段A 1a′1,A 2a′2, ⋯为对应回程截取的. 过端点a1, A2, ⋯和a′1 , a′2, ⋯作与相应的摆杆成(90°- [A]) 或(90°- [A]) 的直线, 简称a 斜线和a′斜线. 这些线的包络线É , Ê , Ë 所包围的阴影区域为满足许用压力角的前提下, 凸轮回转中心的可选区域. O ′1A 0 为最小基圆半径,O ′1O 2 为对应的中心距.以O 2 为原点,O 2A 0 为x 轴, 使A 1,A 2, ⋯各点y 坐标为正值的方向为y 轴, 建立直角坐标系. 若已知包络线É , Ê , Ë 的方程, 则可知凸轮回转中心O 1 的许用区域.2. 2包络线方程的求法及基本尺寸的确定在图2 中, 任意a 斜线的斜率为k = tan A= cot (- [A] - W) , 各a 点的坐标为:x = l (1 -d Wd U cos W) , y = l (1 -d Wd U) sin W, 由点斜式可写出任意a 斜线的方程. 同理, 对任意a′斜线, 斜率为k′= cot ( [A] - W) , 各a′点的坐标为: x ′= l (1 +d Wd U) cos W, y ′= l (1 +d Wd U) sin W, 同样可写出任意a′斜线的方程.由以上包络线方程相交, 可求出凸轮回转中心O 1 的许用区域, 此过程较繁, 可上机求解. 在O 1 的取值范围内任取一点(x , y ) 作为凸轮的回转中心, 则凸轮的基圆半径可确定:图3反转法设计凸轮的轮廓r0 = ( l - x ) 2 + y 2.3凸轮轮廓的设计图3 中, 直角坐标系的原点位于凸轮的回转中心O 1 点. 机架长为a, 摆杆长为l. 摆动滚子从动件的初始位置在行程起始位置1 时的O 20A 0. 反转U角后, 到达位置2 的O 2A. 凸轮与从动件的接触点A 0 到达A 点,A ′A为对应的弧位移s, 对应从动件的摆角W.从动件O 2A的运动可以看作O 20A 0 绕O 1 点反转U角, 到达O 2A ′位置,O 2A ′再摆动W角到达O 2A 位置. 从动件O 2A 的运动还可以看作O 20A 0 绕O 20 点反转(U+ W) 角, 到达O 20A ″点,O 20A ″再平移到O 2A 位置. 设A 0 点的坐标为(x A 0,第1 期毕艳丽等: 摆动滚子从动件盘形凸轮机构设计的解析法37y A 0) ,A 点的坐标为(x , y ) ,O 2A 的复合运动可用下述的坐标旋转和平移变换来实现.y=cos(U+ W) sin (U+ W)- sin (U+ W) cos (U+ W)x A 0 - x O20y A 0 - y O20+x O2y O2(1)式中: x O 2 = a sin U, y O 2 = a co s U, x O20 = 0, y O20 = a, x A 0 = - l sin W 0, y A 0 = a - l co s WW0 为摆杆的初始位置角, 其值为W0 = arccosa2 + l2 - r202al将其代入方程(1) 并整理, 可得理论廓线方程:x = a sin U- l sin (U+ W+ W0) ; y = a cos U- l cos (U+ W+ W0)则其实际廓线方程[ 2 ] 为:x A= x ±r rd yd Ud xd U2+d yd U2, y A= y ºr rd xd Ud xd U2d yd U2其中r r 为滚子半径; 滚子圆的包络线有两条, 上面一组符号用于求解外凸轮的包络线方程, 下面一组符号用于求解内凸轮的包络线方程.4结束语本文利用解析法设计摆动滚子从动件盘形凸轮机构, 适用于用计算机辅助运算设计凸轮机构, 其精度高, 使用方便, 特别适合高精度凸轮机构的设计.参考文献:[ 1 ]尚锐等. 摆动从动件盘形凸轮机构基本尺寸确定的解析法[J ]. 辽宁工学院学报, 1999, (6) : 29- 32.[ 2 ]邹慧君等. 机械原理[M ]. 北京: 高等教育出版社, 1999, 117- 132.。
摆动从动件盘形凸轮压力角的分析
凸轮机构介绍

4、根据从动件的运动形式分
移
动 从 动
( 对 心
件、
凸偏
轮置 机)
构
摆动从动件凸轮机构
0'
第二节 从动件运动规律设计
一、平面凸轮机构的结构和主要参数
S 从动件位移曲线 (,S)
BC B’
S h
基圆
0 O
A
e
0 ’
’
O (A) B
Dh
2π
0 ’ ’
0
推远程休运止动角角回近程休运止动角角
30
.650
Y yB rr sin
dxB d dy B d
2 240 0,2 200 .650
X1 52.81
dxB d (ds d e)sin (s s0)cos
Y1 16.59
dyB d (ds d e)cos (s s0)sin
s1
0,
s2
80 2 3
20
8.49, xB1
[1 cos(1.2
55.39, yB1
3)] 26.18
18.12
实际廓线上点的坐标x:B2
X xB rr cos tg
36
dx B dy B
.03,
yB2 6.95
1 600, 1
dxB d dy B d
b、刀具中心轨迹方程
c
滚子
rr
'
砂轮
rc
rc-rr
滚子
rr
c
'
xC xB rr cos
rr-rc
摆动从动件盘形凸轮轮廓曲线的精确绘制
I l
冀 ;
^
睁
窖
黟
;p ; 錾
0
引
l 毫 8i
I | l釜
臻
,
3u 35 so 2 . 奠 ; 34
—
驴 Biblioteka i r 6 善 l 3 s 2 味 9 I 6 彳 1 5 婚。 3 i
0.s拳三3 摹球.3转 0 3嚣 = } 篁。 譬 .g06 王 蟮
21 0 1年 2月
十 堰 职 业 技 术 学 院 学 报
J u n lo hy n Te h ia n tt t o r a fS ia c n c lI s iu e
Fe ., 0l b 2 J
第 2 4卷 第 l 期
V0. N0 1 24 .1
摆 动 从 动 件 盘 形 凸 轮 轮 廓 曲线 的精 确 绘 制
鲁 春发
(十堰 职业 技术 学 院 图文信息 中心 ,湖北 十 堰 4 2 0 4 0 0)
[ 摘
要] 通过 对摆 动从 动件 凸轮 轮 廓 曲线 的 几何 分析 , 用 办公 软 件 Exe 准确 计 算 出轮 廓 运 cl
曲线上 各点 的 坐标后 用 Wo d或 C r AD精 确地 绘制 出摆动 从 动件 凸轮机 构 中凸轮 的轮 廓 曲线 。
利 — 3 用 Wod精 确 绘 制 摆 动 从 动 件 盘 形 凸轮 绘制 出尖顶 从动 件 盘 形 凸轮 轮廓 曲线 后 , 用 Au r tC o AD软 件中 的偏 移工具 进行 绘制 , 方法是 : 机构 凸轮 的 轮 廓 曲 线 ( ) 人“ 移” 1输 偏 命令 ; 用 E cl x e 中插 入 图表 的功 能 插 入 以 F列 为数 据 ( ) 出 偏 移 的 距 离 ( 滚 子 的 半 径 ); 2给 即 源 的雷达 图 , 除 不 必 要 的线 后 选 中该 图点 击 “ 清 复 () 3 选择 要偏 移的实 体 ( 即尖 顶从 动件 盘形 凸轮 制” 然后 在 Wo d中 “ , r 粘贴 ” 图 , 准 确地 得 到 了 此 即 轮 廓 曲 线 ) ; 凸轮 的轮 廓 曲线 如 图 3所示 。 ( ) 定偏移 的方位 ( 鼠标 点击尖 顶从 动件 盘 4指 用 形 凸轮轮 廓 曲线 的 内 侧 即 可) 。此 时 C AD 就 自动 绘 出了滚 子从 动件 盘形 凸轮 的轮 廓 曲线 。
第三章凸轮机构

第三章凸轮机构§3-1凸轮机构的组成和类型一、凸轮机构的组成1、凸轮:具有曲线轮廓或沟槽的构件,当它运动时,通过其上的曲线轮廓与从动件的高副接触,使从动件取得预期的运动。
2、凸轮机构的组成:由凸轮、从动件、机架这三个大体构件所组成的一种高副机构。
二、凸轮机构的类型1.依照凸轮的形状分:空间凸轮机构:盘形凸轮:凸轮呈盘状,而且具有转变的向径。
它是凸轮最大体的形式,应用最广。
移动(楔形)凸轮:凸轮呈板状,它相关于机架作直线移动。
盘形凸轮转轴位于无穷远处。
空间凸轮机构:圆柱凸轮:凸轮的轮廓曲线做在圆柱体上。
2.依照从动件的形状分:(1)尖端从动件从动件尖端能与任意形状凸轮接触,使从动件实现任意运动规律。
结构简单,但尖端易磨损,适于低速、传力不大场合。
(2)曲面从动件:从动件端部做成曲面,不易磨损,利用普遍。
(3)滚子从动件:滑动摩擦变成转动摩擦,传递较大动力。
(4)平底从动件优势:平底与凸轮之间易形成油膜,润滑状态稳固。
不计摩擦时,凸轮给从动件的力始终垂直于从动件的平底,受力平稳,传动效率高,经常使用于高速。
缺点:凸轮轮廓必需全数是外凸的。
3.依照从动件的运动形式分:4.依照凸轮与从动件维持高副接触的方式分:(1)力封锁型凸轮机构:利用重力、弹簧力或其它外力使从动件与凸轮轮廓始终维持接触。
封锁方式简单,对从动件运动规律没有限制。
5、其它反凸轮机构:摆杆为主动件,凸轮为从动件。
应用实例:自动铣槽机应用反凸轮实现料斗翻转§3-2凸轮机构的特点和功能一.凸轮机构的特点一、优势:(1)结构简单、紧凑,具有很少的活动构件,占据空间小。
(2)最大优势是关于任意要求的从动件运动规律都能够毫无困难地设计出凸轮廓线来实现。
2、缺点:由于是高副接触,易磨损,因此多用于传力不大的场合。
二.功能1、实现无特定运动规律要求的工作行程应用实例:车床床头箱中利用凸轮机构实现变速操纵2、实现有特定运动规律要求的工作行程应用实例:自动机床中利用凸轮机构实现进刀、退刀3、实现对运动和动力特性有特殊要求的工作行程应用实例:船用柴油机中利用凸轮机构操纵阀门的启闭4、实现复杂的运动轨迹应用实例:印刷机中利用凸轮机构适当组合实现吸纸吸头的复杂运动轨迹§3-3从动件运动规律设计一.基础知识1、从动件运动规律:从动件的位移、速度、加速度及加速度转变率随时刻或凸轮转角转变的规律。
滚子摆动从动件盘形凸轮廓线和压力角的一种计算方法
时, 说明机构处于回程运动。 此外, 经分析可知, 只要按op、o1p 和 Α的代数值计算, 则上述
各式同样适用于回程段和休止段的计算。
2 凸轮廓线的计算
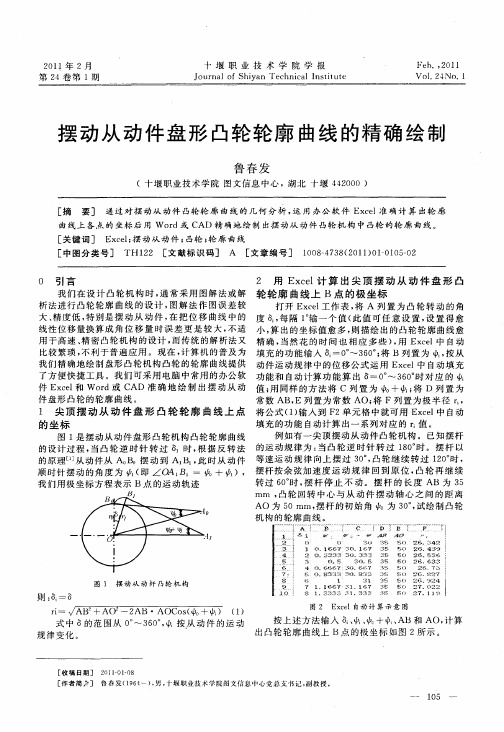
设计中确定出 A 、L 、rb 和 r0 之后, 即可按图 2 所示流程图编程计算凸轮工作廓线坐 标和压力角。
算例: 某滚子摆动从动件盘形凸轮机构如图 1 所示。已知摆杆长度L = 170 mm , 最大 摆角 Ωm = 30°, 滚子半径 r0= 15 mm , 中心距 A = 200 mm , 推程角为 150°, 远休止角为 60°,
ddΩ∆=
0 (150°≤∆≤210°) - Π8 sin (Π(∆- 210) 120) (210°≤∆≤330°)
0 (330°≤∆≤360°) 据上述公式按图 2 编程, 并取 rb= 70 mm , ∆ 的步长为 1°, 在微机上算出了凸轮工作廓
第 2 期 李建功: 滚子摆动从动件盘形凸轮廓线和压力角的一种计算方法 4 1
回程角为 120°, 近休止角为 30°, 摆杆在推、回程皆做余弦加速度运动, 许用压力角[ Α]= 35°, 试设计该凸轮的工作廓线。
解: 经整理得摆杆做余弦加速度运动时的角位移方程为:
图 2 计算流程图
15°× (1- co s(Π∆ 150) ) (0°≤∆≤150°)
0 引 言
目前, 有关凸轮设计的各种资料中, 关于滚子摆动从动件盘形凸轮的解析法设计, 多 沿袭图解法设计的思路, 利用“反转法”原理先求理论廓线, 然后根据理论廓线再计算工作 廓线 (实际廓线) [1]。 这样, 要想计算凸轮的工作廓线坐标, 必须先计算其理论廓线。 实际 上, 借助于速度瞬心可以不计算理论廓线而直接计算工作廓线上各点的坐标, 也可以不经 计算工作廓线而直接计算加工凸轮时刀具中心的轨迹坐标。 本文利用瞬心的性质建立了 一套计算滚子摆动从动件盘形 凸轮廓线坐标和压力角的解析 式。
凸轮机构基本参数的设计
凸轮机构基本参数的设计前节所先容的几何法和解析法设计凸轮轮廓曲线,其基圆半径r0、直动从动件的偏距e或摆动从动件与凸轮的中心距a、滚子半径rT等基本参数都是预先给定的。
本节将从凸轮机构的传动效率、运动是否失真、结构是否紧凑等方面讨论上述参数的确定方法。
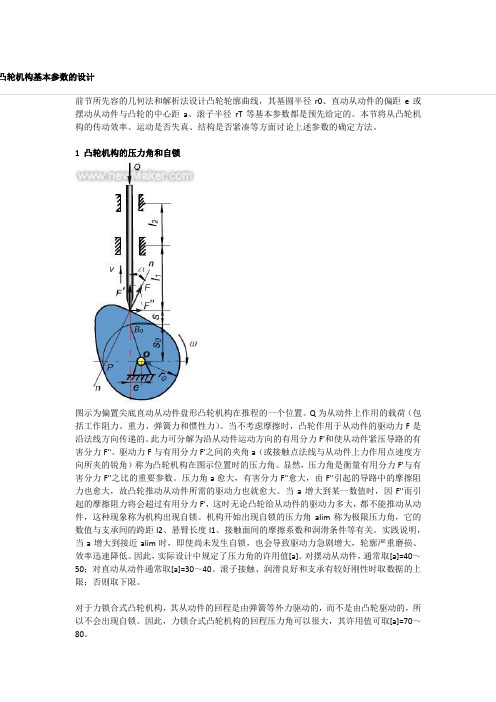
1 凸轮机构的压力角和自锁图示为偏置尖底直动从动件盘形凸轮机构在推程的一个位置。
Q为从动件上作用的载荷(包括工作阻力、重力、弹簧力和惯性力)。
当不考虑摩擦时,凸轮作用于从动件的驱动力F是沿法线方向传递的。
此力可分解为沿从动件运动方向的有用分力F'和使从动件紧压导路的有害分力F''。
驱动力F与有用分力F'之间的夹角a(或接触点法线与从动件上力作用点速度方向所夹的锐角)称为凸轮机构在图示位置时的压力角。
显然,压力角是衡量有用分力F'与有害分力F''之比的重要参数。
压力角a愈大,有害分力F''愈大,由F''引起的导路中的摩擦阻力也愈大,故凸轮推动从动件所需的驱动力也就愈大。
当a增大到某一数值时,因F''而引起的摩擦阻力将会超过有用分力F',这时无论凸轮给从动件的驱动力多大,都不能推动从动件,这种现象称为机构出现自锁。
机构开始出现自锁的压力角alim称为极限压力角,它的数值与支承间的跨距l2、悬臂长度l1、接触面间的摩擦系数和润滑条件等有关。
实践说明,当a增大到接近alim时,即使尚未发生自锁,也会导致驱动力急剧增大,轮廓严重磨损、效率迅速降低。
因此,实际设计中规定了压力角的许用值[a]。
对摆动从动件,通常取[a]=40~50;对直动从动件通常取[a]=30~40。
滚子接触、润滑良好和支承有较好刚性时取数据的上限;否则取下限。
对于力锁合式凸轮机构,其从动件的回程是由弹簧等外力驱动的,而不是由凸轮驱动的,所以不会出现自锁。
因此,力锁合式凸轮机构的回程压力角可以很大,其许用值可取[a]=70~80。