自动控制原理胡寿松第五章答案
《自动控制原理》胡寿松自动控制原理简明教程第5章详解
bm1s bm an1s an
➢ 惯性环节:1/(Ts+1),式中T>0
➢ 一阶微分环节:(Ts+1),式中T>0
➢ 积分环节:1/s
➢ 微分环节:s
➢ 振荡环节:1/[(s/ωn)2+2ξs/ωn+1];式中ωn>0,0 < ξ <1 ➢ 二阶微分环节:(s/ωn)2+2 ξ s/ωn+1;式中ωn>0,0 < ξ <1
线性分度,单位是分贝(dB);对数相频曲线的纵坐标按 φ(ω) 线性分度,单位是度(°)。由此构成的坐标系称为 半对数坐标系。
ω和lgω的关系表
① ω轴为对数分度, 即采 用相等的距离代表相等的 频率倍增,在伯德图中横 坐标按μ=lgω均匀分度。 ② ω=0在对数分度的坐标系中的负无穷远处,ω =0不可能 在横坐标上表示出来,横坐标上表示的最低频率由所感兴 趣的频率范围确定。 ③ 从表中可以看出,ω的数值每变化10倍, 在对数坐标 上lgω相应变化一个单位。 频率变化10倍的一段对数刻度 称为“十倍频程”, 用“dec”表示。
arctg
2
曲线起自幅角
为-v90°的
无穷远处。
1. 极坐标图的起点
2T T 2
2
tan
1
2T T 2 2
1
0 L 0dB
-40
0 90
0
180
L 20 lgT 2 40 lgT
180
n
1 T
90
1 10 TT
40dB dec
(a) (b)
➢ 延迟环节
Gs eTs
G j e jT G j 1 G j T
精确曲线
自动控制原理第五章习题及答案

第五章习题与解答5-1试求题5-1图(a)、(b)网络的频率特性。
u r R1u cR2CR2R1u r u c(a) (b)题5-1图R-C网络解(a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(RRCRRTCRRRRKsTsKsCRsCRRRsUsUrcττωωτωωωωω11121212121)1()()()(jTjKCRRjRRCRRjRjUjUjGrca++=+++==(b)依图:⎩⎨⎧+==++=+++=CRRTCRsTssCRRsCRsUsUrc)(1111)()(2122222212ττωωτωωωωω2221211)(11)()()(jTjCRRjCRjjUjUjGrcb++=+++==5-2某系统结构图如题5-2图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出)(tcs和稳态误差)(tes(1)tt r2sin)(=(2))452cos(2)30sin()(︒--︒+=ttt r题5-2图反馈控制系统结构图解 系统闭环传递函数为: 21)(+=Φs s 频率特性:2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-=系统误差传递函数: ,21)(11)(++=+=Φs s s G s e 则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时,2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ4.1862arctan )2(,79.085)(2====Φ=j j e e ϕωω )452sin(35.0)2sin()2(-=-Φ=t t j r c m ss ϕ)4.182sin(79.0)2sin()2(+=-Φ=t t j r e e e m ss ϕ(2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5.26)21arctan()1(45.055)1(-=-===Φj j ϕ 4.18)31arctan()1(63.0510)1(====Φj j e e ϕ )]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t c m m ss ϕϕ+-⋅Φ-++⋅Φ=)902cos(7.0)4.3sin(4.0--+=t t)]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t e e e m e e m ss ϕϕ+-⋅Φ-++⋅Φ=)6.262cos(58.1)4.48sin(63.0--+=t t5-3 若系统单位阶跃响应h t e e t tt ()..=-+≥--11808049试求系统频率特性。
《自动控制原理》 胡寿松 习题答案(附带例题课件)
二、本课程实验的基本理论与实验技术知识
采用 MATLAB 软件上机进行实验,就是利用现代计算机硬件和计算机软件技术,以数字仿真技术为核 心,实现对自动控制系统基本理论和分析方法的验证以及控制系统设计。 通过上机实验,使学生在 MATLAB 软件的基本使用、编程调试、仿真实验数订人:杨志超 大纲审定人:李先允 制订日期:2005 年 6 月
5
《自动控制原理》电子教案
《自动控制原理》课程实验教学大纲
一、实验教学目标与基本要求
《自动控制原理》 课程实验通过上机使用 MATLAB 软件, 使学生初步掌握 MATLAB 软件在控制理论中的 基本应用,学会利用 MATLAB 软件分析控制系统,从而加深对自动控制系统的认识,帮助理解经典自动控 制的相关理论和分析方法。 通过本课程上机实验, 要求学生对 MATLAB 软件有一个基本的了解, 掌握 MATLAB 软件中基本数组和矩阵的表示方法,掌握 MATLAB 软件的基本绘图功能,学会 MATLAB 软件中自动控制理论 常用函数的使用,学会在 MATLAB 软件工作窗口进行交互式仿真和使用 M_File 格式的基本编程方法,初步 掌握利用 MATLAB 软件进行控制系统设计,让学生得到撰写报告的基本训练。
4.频率法反馈校正的基本原理和方法(选讲)
(七)非线性控制系统 了解非线性系统与线性系统的区别,了解非线性特性和非线性系统的主要特征,学会非线性系统的描 述函数分析方法,了解非线性系统的相平面分析法(选讲) 。
3
《自动控制原理》电子教案
1. 非线性系统的基本概念 2. 典型非线性特性、非线性系统的主要特征 3. 描述函数定义、应用条件和求取方法 4. 应用描述函数分析非线性系统的稳定性 5. 非线性系统自激振荡分析和计算 6. 介绍非线性系统相平面分析法(选讲)
自动控制原理第五版 胡寿松课后习题答案完整版

第 一 章1-1 图1-2是液位自动控制系统原理示意图。
在任意情况下,希望液面高度c 维持不变,试说明系统工作原理并画出系统方块图。
图1-2 液位自动控制系统解:被控对象:水箱;被控量:水箱的实际水位;给定量电位器设定水位r u (表征液位的希望值r c );比较元件:电位器;执行元件:电动机;控制任务:保持水箱液位高度不变。
工作原理:当电位电刷位于中点(对应r u )时,电动机静止不动,控制阀门有一定的开度,流入水量与流出水量相等,从而使液面保持给定高度r c ,一旦流入水量或流出水量发生变化时,液面高度就会偏离给定高度r c 。
当液面升高时,浮子也相应升高,通过杠杆作用,使电位器电刷由中点位置下移,从而给电动机提供一定的控制电压,驱动电动机,通过减速器带动进水阀门向减小开度的方向转动,从而减少流入的水量,使液面逐渐降低,浮子位置也相应下降,直到电位器电刷回到中点位置,电动机的控制电压为零,系统重新处于平衡状态,液面恢复给定高度r c 。
反之,若液面降低,则通过自动控制作用,增大进水阀门开度,加大流入水量,使液面升高到给定高度r c。
系统方块图如图所示:1-10 下列各式是描述系统的微分方程,其中c(t)为输出量,r (t)为输入量,试判断哪些是线性定常或时变系统,哪些是非线性系统?(1)222)()(5)(dt t r d t t r t c ++=;(2))()(8)(6)(3)(2233t r t c dt t dc dt t c d dt t c d =+++; (3)dt t dr t r t c dt t dc t )(3)()()(+=+; (4)5cos )()(+=t t r t c ω; (5)⎰∞-++=t d r dt t dr t r t c ττ)(5)(6)(3)(;(6))()(2t r t c =;(7)⎪⎩⎪⎨⎧≥<=.6),(6,0)(t t r t t c解:(1)因为c(t)的表达式中包含变量的二次项2()r t ,所以该系统为非线性系统。
《自动控制原理》第五章习题解答

2 ωn s( s + 2ζω n )
G( s) =
当取 r (t ) = 2 sin t 时,系统的稳态输出
css (t ) = 2 sin(t − 450 )
试确定系统参数 ω n , ζ 。 解:根据公式(5-16)和公式(5-17) 得到: c ss (t ) = A G B ( jω ) sin(ωt + ϕ + ∠G B ( jω ))
根据题目给定的条件: ω = 1 A = 2 所以: G B ( jω ) =
2 (ω n − ω 2 ) + (2ζω nω ) 2
=
=1
(1)
∠G B ( jω ) = − arctan
2ξω nω 2ξω = − arctan 2 n = −45 0 2 2 ωn − ω ωn −1
(2)
由式(1)得 ω n = (ω n − 1) + ( 2ζω n )
20
ϕ (ω )
− 89 o
− 87.2 o
− 92.1o − 164 o
− 216 o
− 234.5 o
− 246 o
− 254 o
− 258 o
ω
30
50
100
ϕ (ω )
− 262 o
− 265 o
− 267.7 o
作系统开环对数频率特性图,求得 ω c = 1 ,系统的穿越频率 ω r = 18 系统的幅值裕度和相角裕度为 h =
-26
-20
5-12 已知最小相位系统的对数幅频渐进特性曲线如图 5-50 所示, 试确定系统的开环传递函 数。 解: (a) G ( s ) =
自动控制原理_胡寿松第5版_课后习题及答案_完整
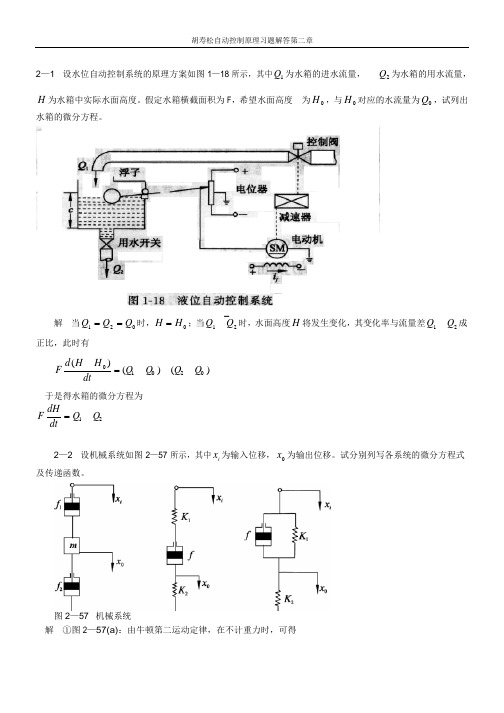
2—1 设水位自动控制系统的原理方案如图1—18 所示,其中Q1 为水箱的进水流量,Q2 为水箱的用水流量,H 为水箱中实际水面高度。
假定水箱横截面积为F,希望水面高度为H0 ,与H对应的水流量为Q,试列出水箱的微分方程。
解当Q1 =Q2=Q时,H =H;当Q1⎺Q2时,水面高度H 将发生变化,其变化率与流量差Q1Q2成正比,此时有F d (H H)= (Q Q ) (Q Q ) dt 1 0 2 0于是得水箱的微分方程为F dH=Q Qdt 1 22—2 设机械系统如图2—57 所示,其中x i 为输入位移,x0 为输出位移。
试分别列写各系统的微分方程式及传递函数。
图2—57 机械系统解①图2—57(a):由牛顿第二运动定律,在不计重力时,可得2 1f 1 ( x &i x &0 ) f 2 x &0 = m &x&0整理得m d x 0+ ( f + f ) dx 0 = f dx i dt 2 1 2 dt 1 dt将上式进行拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得[ms 2+ ( f + f 2)s ]X 0(s ) = f 1sX i(s )于是传递函数为X 0 (s ) =X i (s ) f 1 ms + f 1 + f 2②图 2—57(b):其上半部弹簧与阻尼器之间,取辅助点 A ,并设 A 点位移为 x ,方向朝下;而在其下半部工。
引出点处取为辅助点 B 。
则由弹簧力与阻尼力平衡的原则,从 A 和 B 两点可以分别列出如下原始方程:K 1 ( x i x ) =f ( x & x &0 )K 2 x 0 = f ( x & x&0 )消去中间变量 x ,可得系统微分方程f (K + K ) dx 0 + K K x= K f dx i 1 2 dt 1 2 0 1 dt对上式取拉氏变换,并计及初始条件为零,得系统传递函数为X 0 (s ) =X i (s ) fK 1 s f (K 1 + K 2 )s + K 1 K 2③图 2—57(c):以 x 0 的引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:K 1 ( x i x ) + f ( x &i x&0 ) = K 2 x 0移项整理得系统微分方程f dx 0+ (K dt 1 + K2 ) x 0 = f dx i dt+ K 1 x i对上式进行拉氏变换,并注意到运动由静止开始,即x i (0) = x 0 (0) = 0则系统传递函数为X 0 (s ) =X i (s ) fs + K 1 fs + (K 1 + K 2 )2-3 试证明图2-58(a)的电网络与(b)的机械系统有相同的数学模型。
自动控制原理胡寿松第5版课后习题及答案完整

且初始条件c(0)=-1,c&(0)=0。试求阶跃输入r(t)=1(t)时,系统的输出响应c(t)。
解:由系统的传递函数得:
dc(t)3dc(t)2c(t)2r(t)
(1)
dt2dt
对式(1)取拉氏变换得:
s2C(s)−sc(0)−c&(0)3sC(s)−3c(0)2C(s)2R(s)
将初始条件代入(2)式得
解:系统结构图及微分方程得:
G(s)
20
6s10
H(s)
10
20s5
1020
E(s)1010
C(s)
10G(s)
6s10
R(s)
1G(s)H(s)
2010
R(s)
1G(s)H(s)12010
1
6s1020s5
6s1020s5
10(20s5)(6s10)
1200s21500s500
200(20s5)
200(20s5)
LsRa
(s)
Ea(s)CeΩm
(s)
aa
CmIa(s)Mm(s)
Mm(s)−Mc(s)Ω
(s)
Jmsfm
得到系统结构图如下:
Mc
Ua(s)
1Ia(s)CmMm
1Ωm(s)
-Las+RaJms+fm
Ce
Ωm(s)
Cm
LasRa
1
JmsfmCm
Ua(s)
1CeCm
LasRa
1
Jmsfm
(LasRa)(Jmsfm)CeCm
(f1
K
1
s1)(f2
K2
s1)
(f1
K
自动控制原理-胡寿松-第二版-答案全解参考word

第二章控制系统的数学模型习题及参考答案自动控制原理胡寿松第二版课后答案2-2 由牛顿第二运动定律,在不计重力时,可得整理得将上式拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得于是传递函数为②其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。
引出点处取为辅助点B。
则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:消去中间变量x,可得系统微分方程对上式取拉氏变换,并计及初始条件为零,得系统传递函数为③以引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:移项整理得系统微分方程对上式进行拉氏变换,并注意到运动由静止开始,即则系统传递函数为2-3(b)以k1和f1之间取辅助点A,并设A点位移为x,方向朝下;根据力的平衡原则,可列出如下原始方程:所以2-6解:2-7 解:2-8 解:2-9解:2-10解:系统的结构图如下:系统的传递函数为:2-11 解:(a)(b)(c)(d)(e)(f)2-12 解:第三章线性系统的时域分析习题及参考答案自动控制原理胡寿松第二版课后答案3-1解:3-2 解:3-3 解:3-4 解:3-5 解:3-6 解:3-7 解:3-8 解:3-9 解:列劳斯表如下:系统不稳定3-10 解:(略)3-11 解:系统的特征方程为:化简得;列劳斯表如下:0<k<1.73-12 解:系统的开环传递函数为:特征方程为:列劳斯表如下:所以τ>03-13 解:(1)、(2)(3)3-14 解:(1)(2)(3)3-15 解:(1)系统的开环传递函数为:而(2)系统的开环传递函数为:而(3)系统的开环传递函数为:而同时作用下的系统误差为:第四章线性系统的根轨迹法习题及参考答案自动控制原理胡寿松第二版课后答案4-1 解:系统的开环传递函数为根轨迹如图所示4-2 解:4-3 解:(1)系统的开环传递函数为概略的根轨迹如下图所示:(2)系统的开环传递函数为根轨迹如下图所示4-4 解:(1)系统的开环传递函数为(2)系统的开环传递函数为有三个极点一个零点:(-20,j0)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制原理胡寿松第五章答案
1、家用灯泡工作时既能发光,同时也会发热,说明电灯可以把电能转化为()。
[单选题] *
A.光能
B.热能
C.光能和热能(正确答案)
2、自然环境是人类赖以生存的根本,我们应该保护自己的家园不被破坏。
[判断题] *
对(正确答案)
错
3、仿生学是模仿生物的功能和结构从而发明出新的设备、工具和技术的学科。
下列与仿生学无关的是()。
[单选题] *
A.八哥模仿主人的声音说“早上好”(正确答案)
B.模拟蝴蝶调温方式设计人造卫星温控系统
C.模仿海豚的皮肤制成多层的潜水艇外壳
4、以下没有新物质产生的变化是( )。
[单选题] *
A.水蒸发变成水蒸气(正确答案)
B.白醋浸泡贝壳
C.白糖加热变成焦糖
5、关于小孔成像,说法不正确的一项是()。
[单选题] *
A.小孔成像的原理是光在空气中沿直线传播
B.光穿过小孔后改变了传播的方向(正确答案)
C. 2000多年前,我国古代科学家墨子就做了类似“小孔成像”的实验
6、铁钉在有腐性的情况下容易生锈,( ) 不能防止和减缓铁钉生锈。
[单选题] *
A.刷油漆
B.抹油
C.经常清洗(正确答案)
7、工人师傅搬运杂乱的废钢铁很麻烦,用电磁起重机就省事多了。
电磁起重机搬运废钢铁时,主要是利用电磁铁()这一性质来工作的。
[单选题] *
A.承重力强
B.同性排斥,异性吸引
C.通电产生磁性,断电磁性消失(正确答案)
8、化石能保存生物的( )。
[单选题] *
A.骨骼(正确答案)
B.肌肉
C.内脏
9、探究小组准备做空投包实验,下面说法不正确的是()。
[单选题] *
A.不可以在没有防护栏杆或防护栏杆不够牢固的地方进行实验
B.探探在空投包内加了一层海绵,这是为了增加空投包的重量,加快其下落速度(正确答案)
C.究究选择玻璃线吊纸盒是因为玻璃线不粗糙,阻力小
10、一块条形磁铁不小心摔倒了地上断成两截。
其中的一截磁铁上有( ) 个磁极[单选题]
A.1个
B.2个(正确答案)
C.3个
11、圆柱形和球形的器具装水后也有放大功能。
( ) [单选题]
对(正确答案)
错
12、宇宙中每时每刻都有许多恒星在诞生,同时也有许多恒星在消亡,宇宙充满着活力。
[判断题] *
对(正确答案)
错
13、狗在春秋两季容易换毛,是为了()。
[单选题] *
A.换新鲜的毛,更干净、更美
B.适应温度的变化(正确答案)
C.没有作用
14、( )这颗行星距离太阳最近。
[单选题] *
A.水星(正确答案)
B.金星
C.地球
15、潜艇是能够在水下航行的船。
[判断题] *
对(正确答案)
错
16、每天正午时分,究究都会路过郑州千玺广场,他发现“大玉米”一年四季的影长不同,下面选项中,“大玉米”影长最长的是()。
[单选题] *
A.5月6日
B.10月28日
C. 12月15日(正确答案)
17、(昆明市)唐朝的张志和曾记载了著名的“人工彩虹”实验:“背日喷乎水,成霓虹之状。
”小泽想用这种方法制造彩虹,应采用的方法是()。
[单选题] *
A.(正确答案)
B.
C.
18、人类历史上第一架飞机“飞行者一号”是由()制造的。
[单选题] *
A.达·芬奇
B.奥托·李林塔尔
C.莱特兄弟(正确答案)
19、洋葱表皮是由细胞构成的。
( ) [单选题]
对(正确答案)
错
20、在北部的星空中,有七颗屋组成勺子的模样,这七颗星被称为( )。
[单选题] *
A.勺星
B.北斗星(正确答案)
C北极星
21、根据中国营养学会建议的儿童热能供给量可知,正在读五年级的妙妙(11岁)每天应摄入()能量。
[单选题] *
A. 1700千卡
B. 2200千卡(正确答案)
C. 2700千卡
22、我们说要安全用电,下列做法合适的是( ) [单选题] *
A.在户外活动时,不靠近高压线(正确答案)
B.遇到电器着火,要用手去拔插头
C用湿布擦带电设备
23、我们制作的小船可以装上风力推动装置或蒸汽推动装置。
[判断题] *
对(正确答案)
错
24、港珠澳桥采用桥、岛、隧为一体的主要原因是( )。
[单选题] *
A.我国建造特高大桥的技术不成熟,而建造海底隧道的技术很成熟
B.为了保证水陆空立体交通线互不干扰(正确答案)
C.保护环境
25、汽水中含有的气体是( ) 。
[单选题] *
A.氧气
B.二氧化碳(正确答案)
C.一氧化碳
26、用弹珠来模拟船上面的货物时,我们会发现弹珠会滚动,导致船容易侧翻,所以可以将船舱设计成分格结构。
[判断题] *
对(正确答案)
错
27、垃圾分类是减少垃圾并回收利用的好方法。
[单选题] *
A.对(正确答案)
B.错
28、像水那样,可以流动、没有固定形状的物体叫固体。
( ) [单选题]
对
错(正确答案)
29、制作洋葱表皮玻片时滴碘酒,这是为了让细胞染色,便于观察。
( ) [单选题]
对(正确答案)
错
30、为了让辣椒、西瓜等提早上市,农民在冬季就用温水浸泡种子和用塑料薄膜大棚催芽,主要改变的是()。
[单选题] *
A.水分
B.温度(正确答案)
C.光照。