linux操作系统-实验-Linux-多线程编程
操作系统 实验 进程调度 银行家算法 多线程编程 存储管理 磁盘调度

实验一进程调度实验学时:2学时实验类型:设计实验要求:必修一、实验目的多道程序设计中,经常是若干个进程同时处于就绪状态,必须依照某种策略来决定那个进程优先占有处理机。
因而引起进程调度。
本实验模拟在单处理机情况下的处理机调度问题,加深对进程调度的理解。
二、实验内容1.优先权法、轮转法简化假设1)进程为计算型的(无I/O)2)进程状态:ready、running、finish3)进程需要的CPU时间以时间片为单位确定2.算法描述1)优先权法——动态优先权当前运行进程用完时间片后,其优先权减去一个常数。
2)轮转法三、流程图四、实验程序代码package进程调度;/***@author**/public class CPCB {private String name;private int time;private int count;public int getCount() {return count;}public void setCount(int count) { this.count = count;}public String getName() {return name;}public void setName(String name) { = name;}public int getTime() {return time;}public void setTime(int time) {this.time = time;}}package进程调度;/***@author**/class PCB{private String name;private int time ;private int priority ;public int getTime(){return time;}public void setTime(int time){this.time = time;}public int getPriority(){return priority;}public void setPriority(int priority){ this.priority = priority;}public String getName() {return name;}public void setName(String name) { = name;}}package进程调度;import java.util.LinkedList;/***@author**/class process{private final static int nap_time = 500;private LinkedList<PCB> queue = new LinkedList<PCB>();private LinkedList<CPCB> cqueue = new LinkedList<CPCB>();//优先权算法public void go(int p_Num) throws Exception{for(int i = 0;i<p_Num;i++){PCB pcb = new PCB();int time = (int)(Math.random()*20+1);int pri = (int)(Math.random()*20+4);pcb.setName("进程"+i);pcb.setTime(time);pcb.setPriority(pri);queue.add(pcb);}queue = this.sort(queue);int i=0;while(queue.size()!=0){PCB pcb = (PCB)queue.getFirst();System.out.println(i+"\t\t"+pcb.getName()+"运行\t"+"优先级:"+pcb.getPriority()+"---所需时间:"+pcb.getTime());// Thread.sleep(nap_time);int pre = pcb.getPriority() - 3;int time = pcb.getTime() - 1;if(time<=0){System.out.println(pcb.getName()+"\t\t进程运行结束");PCB p = (PCB)queue.removeFirst();System.out.println("移除队列的进程是\t\t"+p.getName()+"\n队列中还有"+queue.size()+"个进程\n");}else{queue.remove();pcb.setPriority(pre);pcb.setTime(time);// System.out.println("运行后:"+i+"----"+pcb.getName()+"---优先级:"+pcb.getPriority()+"---所需时间:"+pcb.getTime());queue.add(pcb);queue = this.sort(queue);}i++;}}//时间片轮转调度算法public void cycle(int p_Num) throws Exception{final int time = 3; //定义轮转时间片数for(int i = 0;i<p_Num;i++){CPCB cpcb = new CPCB();cpcb.setTime((int)(Math.random()*20)+1);cpcb.setName("进程"+i);cpcb.setCount(0);cqueue.add(cpcb);}while(cqueue.size()!=0){CPCB cpcb = (CPCB)cqueue.getFirst();while(cpcb.getCount()!=time){// Thread.sleep(nap_time);cpcb.setTime(cpcb.getTime() - 1);cpcb.setCount(cpcb.getCount()+1);for(int i=0;i<cqueue.size();i++)//输出进程运行情况{CPCB cpcb1 = (CPCB)cqueue.get(i);System.out.println(cpcb1.getName()+"\t\t所需时间片数"+cpcb1.getTime()+"\t\t已占用CPU时间片数"+cpcb1.getCount());}if(cpcb.getTime()==0){System.out.println(cpcb.getName()+"运行结束\n"+"-------------移除队列的是"+cpcb.getName()+"-------------");cqueue.removeFirst();System.out.println("-------------队列中还有"+cqueue.size()+"个进程--------------");break;}if(cpcb.getCount()==time){// cqueue.remove();System.out.println("----因为"+cpcb.getName()+"占用CPU时间片数"+cpcb.getCount()+"="+time);System.out.println(cpcb.getName()+"时间片运行结束"+cpcb.getCount()+cpcb.getTime());CPCB p = (CPCB)cqueue.removeFirst();cqueue.add(p);cpcb.setCount(0);break;}}}}public LinkedList<PCB> sort(LinkedList<PCB> processes){for(int i=0;i<processes.size();i++){PCB thread = new PCB();thread = processes.get(i);for(int j=i+1;j<processes.size();j++){if(thread.getPriority() < processes.get(j).getPriority()){PCB mythread = new PCB();mythread = thread;//thread = processes.get(j);processes.set(i, processes.get(j));processes.set(j, mythread);}}}return processes;}}package 进程调度;import java.io.BufferedReader;import java.io.InputStreamReader;/**** @author 邱福文**/public class MainFun{public void FPF(){}public static void main (String[] args) throws Exception{Integer n2;do{System.out.print("请输入进程数:");BufferedReader sin = new BufferedReader(new InputStreamReader(System.in));String str = sin.readLine();Integer n = Integer.parseInt(str);System.out.print("请输入调度算法:\n"+"1为优先权\n"+"2为轮转法\n"+"0 退出\n");BufferedReader sin2 = new BufferedReader(new InputStreamReader(System.in));String str2 = sin2.readLine();process p = new process();// do{n2 = Integer.parseInt(str2);switch(n2){case 0:break;case 1:p.go(n);break;case 2:p.cycle(n);break;default:System.out.print("输入有误请重新输入");break;}}while(n2!=0);}}五、实验结果请输入进程数:3请输入调度算法:1为优先权2为轮转法0 退出10 进程0运行优先级:19---所需时间:181 进程1运行优先级:19---所需时间:152 进程0运行优先级:16---所需时间:173 进程1运行优先级:16---所需时间:144 进程0运行优先级:13---所需时间:165 进程1运行优先级:13---所需时间:136 进程2运行优先级:10---所需时间:87 进程0运行优先级:10---所需时间:158 进程1运行优先级:10---所需时间:129 进程2运行优先级:7---所需时间:710 进程0运行优先级:7---所需时间:1411 进程1运行优先级:7---所需时间:1112 进程2运行优先级:4---所需时间:613 进程0运行优先级:4---所需时间:1314 进程1运行优先级:4---所需时间:1015 进程2运行优先级:1---所需时间:516 进程0运行优先级:1---所需时间:1217 进程1运行优先级:1---所需时间:918 进程2运行优先级:-2---所需时间:419 进程0运行优先级:-2---所需时间:1120 进程1运行优先级:-2---所需时间:821 进程2运行优先级:-5---所需时间:322 进程0运行优先级:-5---所需时间:1023 进程1运行优先级:-5---所需时间:724 进程2运行优先级:-8---所需时间:225 进程0运行优先级:-8---所需时间:926 进程1运行优先级:-8---所需时间:627 进程2运行优先级:-11---所需时间:1 进程2 进程运行结束移除队列的进程是进程2队列中还有2个进程28 进程0运行优先级:-11---所需时间:829 进程1运行优先级:-11---所需时间:530 进程0运行优先级:-14---所需时间:731 进程1运行优先级:-14---所需时间:432 进程0运行优先级:-17---所需时间:633 进程1运行优先级:-17---所需时间:334 进程0运行优先级:-20---所需时间:535 进程1运行优先级:-20---所需时间:236 进程0运行优先级:-23---所需时间:437 进程1运行优先级:-23---所需时间:1 进程1 进程运行结束移除队列的进程是进程1队列中还有1个进程38 进程0运行优先级:-26---所需时间:339 进程0运行优先级:-29---所需时间:240 进程0运行优先级:-32---所需时间:1进程0 进程运行结束移除队列的进程是进程0队列中还有0个进程请输入进程数:3请输入调度算法:1为优先权2为轮转法0 退出2进程0 所需时间片数8 已占用CPU时间片数1 进程1 所需时间片数6 已占用CPU时间片数0 进程2 所需时间片数13 已占用CPU时间片数0 进程0 所需时间片数7 已占用CPU时间片数2 进程1 所需时间片数6 已占用CPU时间片数0 进程2 所需时间片数13 已占用CPU时间片数0 进程0 所需时间片数6 已占用CPU时间片数3 进程1 所需时间片数6 已占用CPU时间片数0 进程2 所需时间片数13 已占用CPU时间片数0 ----因为进程0占用CPU时间片数3=3进程0时间片运行结束36进程1 所需时间片数5 已占用CPU时间片数1 进程2 所需时间片数13 已占用CPU时间片数0 进程0 所需时间片数6 已占用CPU时间片数0 进程1 所需时间片数4 已占用CPU时间片数2 进程2 所需时间片数13 已占用CPU时间片数0 进程0 所需时间片数6 已占用CPU时间片数0 进程1 所需时间片数3 已占用CPU时间片数3 进程2 所需时间片数13 已占用CPU时间片数0 进程0 所需时间片数6 已占用CPU时间片数0 ----因为进程1占用CPU时间片数3=3进程1时间片运行结束33进程2 所需时间片数12 已占用CPU时间片数1 进程0 所需时间片数6 已占用CPU时间片数0 进程1 所需时间片数3 已占用CPU时间片数0 进程2 所需时间片数11 已占用CPU时间片数2 进程0 所需时间片数6 已占用CPU时间片数0 进程1 所需时间片数3 已占用CPU时间片数0 进程2 所需时间片数10 已占用CPU时间片数3 进程0 所需时间片数6 已占用CPU时间片数0----因为进程2占用CPU时间片数3=3进程2时间片运行结束310进程0 所需时间片数5 已占用CPU时间片数1 进程1 所需时间片数3 已占用CPU时间片数0 进程2 所需时间片数10 已占用CPU时间片数0 进程0 所需时间片数4 已占用CPU时间片数2 进程1 所需时间片数3 已占用CPU时间片数0 进程2 所需时间片数10 已占用CPU时间片数0 进程0 所需时间片数3 已占用CPU时间片数3 进程1 所需时间片数3 已占用CPU时间片数0 进程2 所需时间片数10 已占用CPU时间片数0 ----因为进程0占用CPU时间片数3=3进程0时间片运行结束33进程1 所需时间片数2 已占用CPU时间片数1 进程2 所需时间片数10 已占用CPU时间片数0 进程0 所需时间片数3 已占用CPU时间片数0 进程1 所需时间片数1 已占用CPU时间片数2 进程2 所需时间片数10 已占用CPU时间片数0 进程0 所需时间片数3 已占用CPU时间片数0 进程1 所需时间片数0 已占用CPU时间片数3 进程2 所需时间片数10 已占用CPU时间片数0 进程0 所需时间片数3 已占用CPU时间片数0 进程1运行结束-------------移除队列的是进程1--------------------------队列中还有2个进程--------------进程2 所需时间片数9 已占用CPU时间片数1 进程0 所需时间片数3 已占用CPU时间片数0 进程2 所需时间片数8 已占用CPU时间片数2 进程0 所需时间片数3 已占用CPU时间片数0 进程2 所需时间片数7 已占用CPU时间片数3 进程0 所需时间片数3 已占用CPU时间片数0 ----因为进程2占用CPU时间片数3=3进程2时间片运行结束37进程0 所需时间片数2 已占用CPU时间片数1 进程2 所需时间片数7 已占用CPU时间片数0 进程0 所需时间片数1 已占用CPU时间片数2 进程2 所需时间片数7 已占用CPU时间片数0 进程0 所需时间片数0 已占用CPU时间片数3 进程2 所需时间片数7 已占用CPU时间片数0 进程0运行结束-------------移除队列的是进程0--------------------------队列中还有1个进程--------------进程2 所需时间片数6 已占用CPU时间片数1进程2 所需时间片数4 已占用CPU时间片数3----因为进程2占用CPU时间片数3=3进程2时间片运行结束34进程2 所需时间片数3 已占用CPU时间片数1进程2 所需时间片数2 已占用CPU时间片数2进程2 所需时间片数1 已占用CPU时间片数3----因为进程2占用CPU时间片数3=3进程2时间片运行结束31进程2 所需时间片数0 已占用CPU时间片数1进程2运行结束-------------移除队列的是进程2--------------------------队列中还有0个进程--------------请输入进程数:实验二银行家算法一、实验目的死锁会引起计算机工作僵死,因此操作系统中必须防止。
Unix_Linux_Windows_OpenMP多线程编程

Unix_Linux_Windows_OpenMP多线程编程第三章 Unix/Linux 多线程编程[引言]本章在前面章节多线程编程基础知识的基础上,着重介绍 Unix/Linux 系统下的多线程编程接口及编程技术。
3.1 POSIX 的一些基本知识POSIX 是可移植操作系统接口(Portable Operating SystemInterface)的首字母缩写。
POSIX 是基于 UNIX 的,这一标准意在期望获得源代码级的软件可移植性。
换句话说,为一个 POSIX 兼容的操作系统编写的程序,应该可以在任何其它的 POSIX 操作系统(即使是来自另一个厂商)上编译执行。
POSIX 标准定义了操作系统应该为应用程序提供的接口:系统调用集。
POSIX是由 IEEE(Institute of Electrical andElectronic Engineering)开发的,并由 ANSI(American National Standards Institute)和 ISO(International StandardsOrganization)标准化。
大多数的操作系统(包括 Windows NT)都倾向于开发它们的变体版本与 POSIX 兼容。
POSIX 现在已经发展成为一个非常庞大的标准族,某些部分正处在开发过程中。
表 1-1 给出了 POSIX 标准的几个重要组成部分。
POSIX 与 IEEE 1003 和 2003 家族的标准是可互换的。
除 1003.1 之外,1003 和 2003 家族也包括在表中。
管理 POSIX 开放式系统环境(OSE) 。
IEEE 在 1995 年通过了这项标准。
ISO 的1003.0版本是 ISO/IEC 14252:1996。
被广泛接受、用于源代码级别的可移植性标准。
1003.1 提供一个操作系统的C 语1003.1 言应用编程接口(API) 。
IEEE 和 ISO 已经在 1990 年通过了这个标准,IEEE 在1995 年重新修订了该标准。
linux多线程 pthread常用函数详解

linux多线程pthread常用函数详解Linux多线程是指在Linux操作系统中运行的多个线程。
线程是执行程序的基本单位,它独立于其他线程而存在,但共享相同的地址空间。
在Linux中,我们可以使用pthread库来实现多线程程序。
本文将详细介绍pthread库中常用的函数,包括线程的创建、退出、同步等。
一、线程创建函数1. pthread_create函数pthread_create函数用于创建一个新线程。
其原型如下:cint pthread_create(pthread_t *thread, const pthread_attr_t *attr, void*(*start_routine) (void *), void *arg);参数说明:- thread:用于存储新线程的ID- attr:线程的属性,通常为NULL- start_routine:线程要执行的函数地址- arg:传递给线程函数的参数2. pthread_join函数pthread_join函数用于等待一个线程的结束。
其原型如下:int pthread_join(pthread_t thread, void retval);参数说明:- thread:要等待结束的线程ID- retval:用于存储线程的返回值3. pthread_detach函数pthread_detach函数用于将一个线程设置为分离状态,使其在退出时可以自动释放资源。
其原型如下:cint pthread_detach(pthread_t thread);参数说明:- thread:要设置为分离状态的线程ID二、线程退出函数1. pthread_exit函数pthread_exit函数用于退出当前线程,并返回一个值。
其原型如下:cvoid pthread_exit(void *retval);参数说明:- retval:线程的返回值2. pthread_cancel函数pthread_cancel函数用于取消一个线程的执行。
linux下的CC++多进程多线程编程实例详解
linux下的CC++多进程多线程编程实例详解linux下的C\C++多进程多线程编程实例详解1、多进程编程#include <stdlib.h>#include <sys/types.h>#include <unistd.h>int main(){pid_t child_pid;/* 创建⼀个⼦进程 */child_pid = fork();if(child_pid == 0){printf("child pid\n");exit(0);}else{printf("father pid\n");sleep(60);}return 0;}2、多线程编程#include <stdio.h>#include <pthread.h>struct char_print_params{char character;int count;};void *char_print(void *parameters){struct char_print_params *p = (struct char_print_params *)parameters;int i;for(i = 0; i < p->count; i++){fputc(p->character,stderr);}return NULL;}int main(){pthread_t thread1_id;pthread_t thread2_id;struct char_print_params thread1_args;struct char_print_params thread2_args;thread1_args.character = 'x';thread1_args.count = 3000;pthread_create(&thread1_id, NULL, &char_print, &thread1_args);thread2_args.character = 'o';thread2_args.count = 2000;pthread_create(&thread2_id, NULL, &char_print, &thread2_args);pthread_join(thread1_id, NULL);pthread_join(thread2_id, NULL);return 0;}3、线程同步与互斥1)、互斥pthread_mutex_t mutex;pthread_mutex_init(&mutex, NULL);/*也可以⽤下⾯的⽅式初始化*/pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER; pthread_mutex_lock(&mutex);/* 互斥 */thread_flag = value;pthread_mutex_unlock(&mutex);2)、条件变量int thread_flag = 0;pthread_mutex_t mutex;pthread_cond_t thread_flag_cv;\void init_flag(){pthread_mutex_init(&mutex, NULL);pthread_cond_init(&thread_flag_cv, NULL);thread_flag = 0;}void *thread_function(void *thread_flag){while(1){pthread_mutex_lock(&mutex);while(thread_flag != 0 ){pthread_cond_wait(&thread_flag_cv, &mutex);}pthread_mutex_unlock(&mutex);do_work();}return NULL;}void set_thread_flag(int flag_value){pthread_mutex_lock(&mutex);thread_flag = flag_value;pthread_cond_signal(&thread_flag_cv);pthread_mutex_unlock(&mutex);}感谢阅读,希望能帮助到⼤家,谢谢⼤家对本站的⽀持!。
操作系统实验(进程)多线程实现矩阵乘法

多线程编程实现矩阵乘法
一、实验目的
通过实验,熟悉基于Win32线程库和Pthread线程库的编程环境,掌握利用Windows API和Pthread API进行多线程编程的方法,进一步加深对线程概念以及多线程编程相关事项的理解。
二、实验内容
1. 在Windows操作系统上,利用Windows API编写应用程序实现矩阵乘法。
2. 在Linux操作系统上,利用Pthread API编写应用程序实现矩阵乘法。
3. 在上述两种环境下,实现相乘操作的两个矩阵均作为应用程序的输入参数动态生成,并输出计算结果。
4. 在程序实现过程中,要求每个乘积矩阵元素的计算过程均由一个独立的线程实现。
三、实验步骤
1、windows上:打开codeblocks IDE,创建新C++项目,在新文件中输入如下代码,并编译运行。
2、linux上
打开gedit输入下面的代码,保存为Thread.c,在终端进入文档保存的目录并输入
gcc –c Thread.c
gcc –o Thread Thread.o –lpthread
./Thread 得到输出结果。
四、程序运行时的初值和运行结果
1、在Windows操作系统上,利用Windows API实现矩阵乘法,程序运行结果
2. 在Linux操作系统上,利用Pthread API实现矩阵乘法程序运行结果
Pthread_create()
第一个参数为指向线程标识符的指针。
第二个参数用来设置线程属性。
第三个参数是线程运行函数的起始地址。
最后一个参数是运行函数的参数。
操作系统第二次实验报告——Linux创建进程及可执行文件结构分析
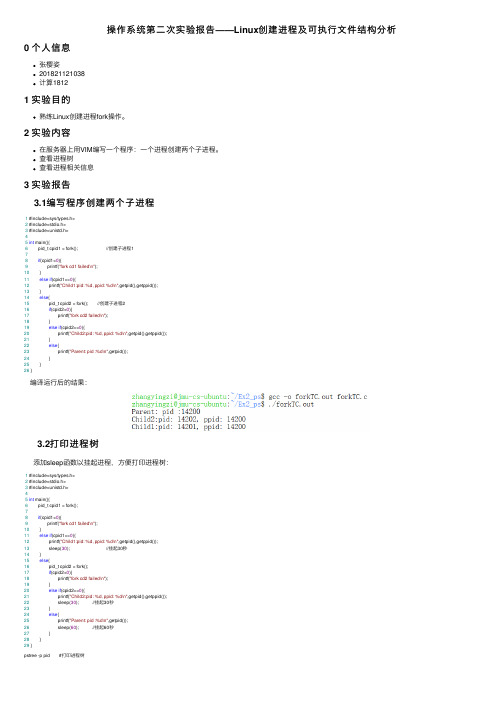
操作系统第⼆次实验报告——Linux创建进程及可执⾏⽂件结构分析0 个⼈信息张樱姿201821121038计算18121 实验⽬的熟练Linux创建进程fork操作。
2 实验内容在服务器上⽤VIM编写⼀个程序:⼀个进程创建两个⼦进程。
查看进程树查看进程相关信息3 实验报告 3.1编写程序创建两个⼦进程1 #include<sys/types.h>2 #include<stdio.h>3 #include<unistd.h>45int main(){6 pid_t cpid1 = fork(); //创建⼦进程178if(cpid1<0){9 printf("fork cd1 failed\n");10 }11else if(cpid1==0){12 printf("Child1:pid: %d, ppid: %d\n",getpid(),getppid());13 }14else{15 pid_t cpid2 = fork(); //创建⼦进程216if(cpid2<0){17 printf("fork cd2 failed\n");18 }19else if(cpid2==0){20 printf("Child2:pid: %d, ppid: %d\n",getpid(),getppid());21 }22else{23 printf("Parent: pid :%d\n",getpid());24 }25 }26 }编译运⾏后的结果:3.2打印进程树 添加sleep函数以挂起进程,⽅便打印进程树:1 #include<sys/types.h>2 #include<stdio.h>3 #include<unistd.h>45int main(){6 pid_t cpid1 = fork();78if(cpid1<0){9 printf("fork cd1 failed\n");10 }11else if(cpid1==0){12 printf("Child1:pid: %d, ppid: %d\n",getpid(),getppid());13 sleep(30); //挂起30秒14 }15else{16 pid_t cpid2 = fork();17if(cpid2<0){18 printf("fork cd2 failed\n");19 }20else if(cpid2==0){21 printf("Child2:pid: %d, ppid: %d\n",getpid(),getppid());22 sleep(30); //挂起30秒23 }24else{25 printf("Parent: pid :%d\n",getpid());26 sleep(60); //挂起60秒27 }28 }29 }pstree -p pid #打印进程树 3.3 解读进程相关信息 3.3.1 解释执⾏ps -ef后返回结果中每个字段的含义 ps -ef输出格式 :UID PID PPID C STIME TTY TIME CMDUID: User ID,⽤户ID。
Linux操作系统应用编程课件(完整版)

2.Linux操作系统的发行版
Linux操作系统发行版实际就是Linux内核加上外围实用程序 组成的一个大软件包。相对于Linux操作系统的内核版本,发行版 的版本号随发布者的不同而不同,与Linux操作系统内核的版本号 是相对独立的。因此把SUSE、RedHat、Ubuntu、Slackware等直 接称为Linux是不确切的,它们是Linux操作系统的发行版。更确 切地说,应该将它们称为“以Linux为核心的操作系统软件包”。
Shell是Linux操作系统的一种用户界面,它作为操作系统 的“外壳”,为用户提供使用操作系统的接口。Shell主要有以 下两大功能特点。
(1)Shell是一个命令解释器,它拥有自己内建的Shell命令集。 (2)Shell的另一个重要特性是它自身就是一种解释型的程序设 计语言。
当用户成功登录Linux系统后,系统将执行一个Shell程序。 正是Shell进程提供了命令提示符。作为默认值,Shell对普通用 户用“$”作提示符,对超级用户(root)用“#”作提示符。
1.4.4 联机手册
联机手册命令man可向用户提供系统中各种命令、系统调用、 库函数和重要系统文件的详细说明,包括名字、使用语法、功能 描述、应用实例和相关参考文件等。其格式如下:
$ man [拥有哪个级别的帮助。 -k:查看和命令相关的所有帮助。
查看who命令的详细说明示例如下。 $ man who
Linux操作系统 应用编程
本章主要介绍Linux文件系统,包括文件系统的结构、文 件的定义与分类、目录与文件操作命令、文件的权限管理等, 让读者对Linux文件系统有一定的认识和理解,为后文的学习 打下基础。
2.1.1 组织结构
Linux操作系统中所有文件存储在文件系统中,文件被组织 到一棵“目录树”中,其文件系统层次结构(树状目录结构)如 图2.1所示。树根在该层次结构的顶部,树根的下方衍生出子目 录分支。
Linux多线程编程问题
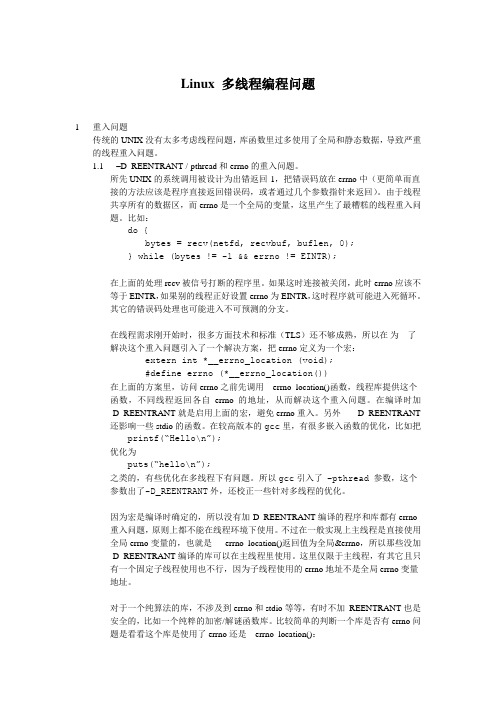
Linux 多线程编程问题1重入问题传统的UNIX没有太多考虑线程问题,库函数里过多使用了全局和静态数据,导致严重的线程重入问题。
1.1–D_REENTRANT /-pthread和errno的重入问题。
所先UNIX的系统调用被设计为出错返回-1,把错误码放在errno中(更简单而直接的方法应该是程序直接返回错误码,或者通过几个参数指针来返回)。
由于线程共享所有的数据区,而errno是一个全局的变量,这里产生了最糟糕的线程重入问题。
比如:do {bytes = recv(netfd, recvbuf, buflen, 0);} while (bytes != -1 && errno != EINTR);在上面的处理recv被信号打断的程序里。
如果这时连接被关闭,此时errno应该不等于EINTR,如果别的线程正好设置errno为EINTR,这时程序就可能进入死循环。
其它的错误码处理也可能进入不可预测的分支。
在线程需求刚开始时,很多方面技术和标准(TLS)还不够成熟,所以在为了解决这个重入问题引入了一个解决方案,把errno定义为一个宏:extern int *__errno_location (void);#define errno (*__errno_location())在上面的方案里,访问errno之前先调用__errno_location()函数,线程库提供这个函数,不同线程返回各自errno的地址,从而解决这个重入问题。
在编译时加-D_REENTRANT就是启用上面的宏,避免errno重入。
另外-D_REENTRANT还影响一些stdio的函数。
在较高版本的gcc里,有很多嵌入函数的优化,比如把printf(“Hello\n”);优化为puts(“hello\n”);之类的,有些优化在多线程下有问题。
所以gcc引入了–pthread 参数,这个参数出了-D_REENTRANT外,还校正一些针对多线程的优化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《操作系统》实验报告
用gcc编译的时候需要加-lpthread,否则会出现以下错误:
五、思考题
多进程编程与多线程编程有何区别?
相同点:Linux下不管是多线程编程还是多进程编程,最终都是用do_fork 实现
不同点:父子进程变量是互不影响的,由于父子进程地址空间是完全隔开的,变量的地址可以是完全相同的。
Linux下编程多用多进程编程少用多线程编程。
多线程比多进程成本低,但性能更低:多进程是立体交通系统,虽然造价高,上坡下坡多耗点油,但是不;多线程是平面交通系统,造价低,但红绿灯太多,老堵车。
1、多进程:子进程是父进程的复制品。
子进程获得父进程数据空间、堆和栈的复制品。
2、多线程:相对与进程而言,线程是一个更加接近与执行体的概念,它可以与同进程的其他线程共享数据,但拥有自己的栈空间,拥有独立的执行序列。
两者都可以提高程序的并发度,提高程序运行效率和响应时间。
3、线程和进程在使用上各有优缺点:线程执行开销小,但不利于资源管理和保护;而进程正相反。
同时,线程适合于在5MP机器上运行,而进程则可以跨机器迁移。
代码:
#include <pthread.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
char globe_buffer[100];
void *read_buffer_thread(void *arg);
int main()
{
int res,i;
pthread_t read_thread;
for(i=0;i<20;i++)
globe_buffer[i]=i;
printf("\nxiancheng thread : write buffer finish\n");
sleep(3);
res = pthread_create(&read_thread, NULL, read_buffer_thread, NULL);
if (res != 0)
{
printf("Read Thread creat Error!");
exit(0);
}
sleep(1);
printf("waiting for read thread to finish...\n");
res = pthread_join(read_thread, NULL);
if (res != 0)
{
printf("read thread join failed!\n");
exit(0);
}
printf("read thread xiancheng OK, have fun!! exit ByeBye\n");
return 0;
}
void *read_buffer_thread(void *arg)
{
int i,x;
printf("Read buffer thread read data : \n");
for(i=0;i<20;i++)
{
x=globe_buffer[i];
printf("%d ",x);
globe_buffer[i]=0;
}
printf("\nread over\n");
}。