2汽温控制系统
基于ADRC—PID的超临界机组主汽温控制系统设计
e 厂] f . ( ¨一 一
攥
z( .) £
中.
… … … 一 1 I
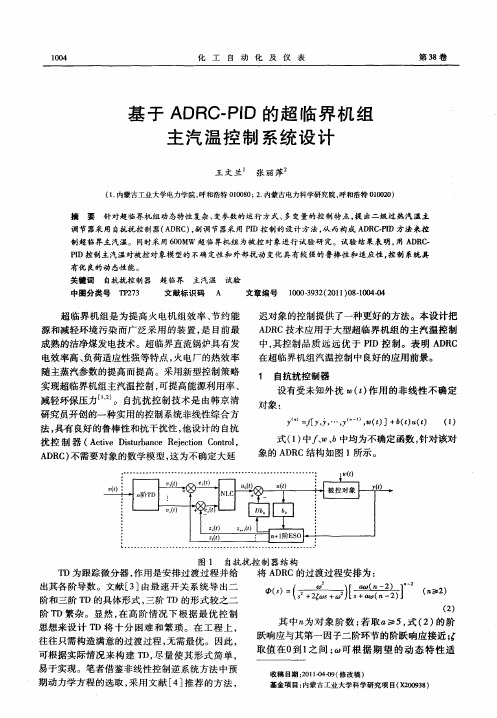
图 1 自抗 扰 控 制 器 结 构
T D为跟 踪微分 器 , 作用 是安排 过渡过 程并 给
出其各 阶导数 。文 献 [ ] 3 由最 速 开关 系 统导 出二 阶 和三阶 T D的具体 形式 , 三阶 T 的形式较 之 二 D
摘
要
针对超临界机组动 态特性复杂、 变参数 的运行 方式、 多变量的控制特点 , 出二级过 热汽温主 提
调节 器采用 自抗扰控制 器( D C) 副调 节器采用 PD控制的设计 方法, 而构 成 A R -I A R , I 从 D CPD方 法来控 制超 临界主汽温。同时采用 60 W 超临界机组 为被控 对 象进 行试验研 究。试验结果表 明 , A R - 0M 用 D C
术说 明书 , 负荷 在 3% ~10 5 0 %范 围内 , 汽 温额 主 定 值 5 1I。以副调节 器 PD为 中心 的 内 回路 是 7 c = I 快 速 回路 , 主要 任务是 消除 负荷变化 、 其 燃水 比失 调、 减温水 压力变 化 、 风量变化 等扰动对 汽温 的 送
影 响 。副调节器 PD的被 调量 P 2 主汽温 的导 I V是
惯性 环节 () 来 消 除 给 水 流 量信 号 的波 动 , t用 ( 反 映给水 流量 与燃 料量 的 比例 。 ( 确定 ) )
校 正的强度 , 并通过 上 、 限幅限制燃 水 比失 调校 下 正 的幅度 为 ±1 ℃ 。 5
对超 临界机 组过热 进行有 效的控 制 。针对 火 电厂 过 热汽温控 制 系统 的大滞 后 、 扰性 差及 动 态 特 抗
性 随工况变 化 的不 确定 性 等 特点 , 出了过 热 汽 给 温 的 自抗扰 控 制 的设计 方 案 , 该设 计 方案 不 需要 精确 模 型 参 数 就 可 以 实 现 干 扰 补 偿 。 通 过
汽轮机各系统解释
汽轮机各系统解释1. 什么是数据采集与处理系统(DAS)?答:数据采集与处理系统(DAS--Data Acquisition System)是机组的信息中心,完成数据的采集、处理,进行CRT显示、记录、报警、历史存储、事故追忆、计算、操作指导等功能。
2. 什么是模拟量控制系统(MCS)?答:模拟量控制系统(MCS)完成单元机组的机炉协调控制和所有自动控制回路的控制,主要有燃料控制系统、给水控制系统、汽温控制系统、制粉控制系统、凝汽器控制系统等。
3. 什么是顺序控制系统(SCS)?答:顺序控制系统(SCS)完成单元机组的各功能系统和设备的顺序控制功能,主要有送风系统、引风系统、烟气系统、给水系统、凝结水系统、循环水系统等。
4. 什么是汽机电液控制系统(DEH)?答:汽机电液控制系统(DEH--Digital Electro-hydraulic Control System)是对汽机进行控制的主要系统,其主要功能是对汽机进行的转速控制、负荷控制、阀门管理、汽机自动控制和汽机超速保护等。
5. 什么是小汽机电液控制系统(MEH)?答:若电厂的给水泵是由小汽机驱动的,则电厂还有小汽机电液控制系统(MEH)。
其主要功能是对小汽机进行转速控制、负荷控制、阀门管理、小汽机自动控制和小汽机超速保护等。
6. 什么是汽机危急遮断系统(ETS)?答:汽机危急遮断系统(ETS—Emergency trip system)是对汽机进行保护的控制系统。
其主要功能是监控汽机的某些参数,当这些参数超过运行极限时,关闭汽机进汽阀。
7. 什么是汽机本体安全监视系统(TSI)?答:汽机本体安全监视系统(TSI----Turbine Supervisory Instruments)是连续测量汽轮发电机轴承及汽轮机本体运行参数的仪表系统,当运行参数出现异常,则发出报警信号。
电厂热工自动控制系统
电厂热工自动控制系统电厂热工自动控制系统单元机组的自动调节系统¾ ¾ ¾ ¾ ¾机组功率-转速调节系统汽温控制系统(过热、再热)水位控制系统(凝汽器、除氧器、汽包)燃烧控制系统(燃料、风量、炉膛压力及一、二次风配比控制)其它单回路控制系统第一部分汽温控制系统一、过热汽温控制系统1. 任务温度过高,可能造成过热器、蒸气管道和汽轮机的高压部分金属损坏;温度过低,会引起电厂热耗上升,并使汽轮机轴向推力增大造成推力轴承过载,还会引起汽轮机末级叶片蒸汽湿度增加,降低汽轮机内效率,加剧对叶片的腐蚀控制要求:最大控制偏差不超过±10℃,长期偏差不超过±5℃规定要求:2. 静态特性过热器的传热形式、结构、布置将直接影响其静态特性。
大容量锅炉一般采用对流过热器、辐射过热器和屏式过热器交替串连布置。
过热器出口温度对流式3. 动态特性蒸汽流量变化、热烟气的热量变化、减温水流量变化相同点:均为有迟延的惯性环节辐射式不同点:特性参数有较大区别蒸汽流量变化扰动下,汽温的迟延和惯性较小烟气扰动与蒸汽流量扰动相似,汽温反映较快减温水流量扰动由于管道较长,汽温反应较慢4. 控制方案串级控制导前微分控制过热器减温器出口温度TE4001TE4025末级过热器出口温度TE4024LDC指令过热器减温水阀控制逻辑静态特性:纯对流特性动态特性:更容易受负荷、燃烧工况等干扰的影响,温度变化幅度较大调节手段:烟气再循环、尾部烟道挡板、喷燃器摆角、喷水减温烟气再循环:尾部烟道烟气抽至炉膛底部,降低炉膛温度,减少炉膛的辐射传热,从而提高炉膛出口烟气的温度和流速。
使再热器的对流传热加强,达到调温的目的。
优点:反应灵敏,调温幅度大。
缺点:系统结构复杂尾部烟道挡板:尾部烟道被分割为两部分,主烟道中布置低温再热器,旁路烟道中布置低温过热器,烟气挡板布置在温度较低的省煤器下面。
优点:结构简单,操作方便缺点:调温灵敏度差,幅度小,挡板开度与汽温不成线性关系。
蒸汽温度自动控制系统

WT1S
1
1
时,1
21K
1
2.21K
;Ti1
T1K 1.2
WT1S
1
1
1
1 Ti1S
时,
(3)主、副回路投入后再作适当调整。
能源与动力工程学院 (二)衰减曲线法
步骤与临界曲线法略同,不同之处要注意!
串级控制系统产生共振效应的条件是:
1.副回路的工作频率ω2接近于共振频率ω; 2.主回路的工作频率ω1接近于副回路的工作频率ω2,即 T1P≈3T2P 。
实际生产中,通常把两种过热器结合使用,对流方式下吸收 的热量比辐射方式下吸收的热量要多,因此综合而言,过热器出 口汽温是随流量D的增加而升高的。
能源与动力工程学院
(2)动态特性 影响汽温变化的扰动因素很多,例如蒸汽负荷,烟气温度和
流速,给水温度,炉膛热负荷,送风量,给水母管压力和减温 水量。
归纳: 蒸汽流量,烟气传热量和减温水三个方面的扰动。 1)蒸汽流量扰动
能源与动力工程学院
(二)现场试验整定法
1、边界稳定法(临界曲线法) (1)先决定副调节器的比例带
主、副回路全部投入闭环,主调节器的参数设置:δ1置于较大位 置,Ti1=∞,Td1=0,副调节器的δ2 置于较大位置,且Ti2=∞,Td2=0, 而后便将副调节器的比例带由大往小调,使副回路产生不衰减振荡 (同时观察2),并记下此时的δ2K(临界比例带),T2K(振荡周 期),则副调节器的参数设置为:
2、锅炉过热汽温串级控制系统原理图
温度定值
主P调I1
副P调I2 执行器
内扰 阀门
θ2
减 导温前器区
过惰热性器区
θ1
变送器
变送器
锅炉蒸汽温度控制系统优秀课件.ppt

再热器受热面结渣或积灰,吸热量减少,再热汽 温降低。
炉膛水冷壁结渣,水冷壁吸热量减少,导致炉膛 出口烟温上升,再热器吸热增加,再热汽温提高。
锅炉蒸汽温度控制系统优秀课件 8
第五章 锅炉蒸汽温度控制系统
(5) 过热蒸汽温度和压力
过热蒸汽温度变化会引起高压缸排汽变化。过热汽 温降低,高压缸排汽温度降低;在再热器吸热量不变的 条件下,因再热器进口温度降低,导致再热器出口温度 降低。
锅炉蒸汽温度控制系统优秀课件 10
第五章 锅炉蒸汽温度控制系统
有延迟,有惯性, 有自平衡能力。
图5-1 蒸汽量变化与对流过热器及辐射过热 器出口汽温变化的静态特性
图5-2 蒸汽量变化对过热器汽 温的影响
实际生产中,通常把两种过热器结合使用,还增 设屏式过热器,且对流方式下吸收的热量比辐射方式 下吸收的热量要多,因此综合而言,过热器出口汽温 是随流量D的增加而升高的。动态特性如图5-2所示。
锅炉蒸汽温度控制系统优秀课件 4
第五章 锅炉蒸汽温度控制系统
(2) 给水温度与汽温的关系
提高给水温度,将使过热汽温下降,这是因为产生 每千克蒸汽需要的燃料量减少了,流经过热器的烟气量 也减少了。也可以这样认为:提高给水温度后,在相同 的燃料量下,锅炉的蒸发量增加了,故过热气温将下降。 因此,是否投入高加将使给水温度相差很大,这对过热 气温有明显影响。
锅炉蒸汽温度控制系统优秀课件 7
第五章 锅炉蒸汽温度控制系统
(3) 炉膛火焰中心
炉膛火焰中心的高度对再热汽温有相当显著的影 响,是调节再热汽温的主要手段。当火焰中心抬高时, 炉膛出口温度上升,以对流受热面为主的再热器其进 口烟温升高,吸热量增加,再热汽温提高;反之,再 热器吸热量减少,再热汽温降低。
热工控制系统第八章 汽温控制系统PPT课件

W X 1 S x y 1 1 S S 1 W T 1 S W W T 1 T S 2 W S T W 2 D S 1 W S D W 1 D S 2 W S D 2 W m S 1 S W Z S
(8-2) (8-3)
对于一个定值系统,扰动造成的影响应该越小越好,而定值部分应尽量保持恒定,因
1 WB 1
W0(s)
θ2
γθ2
上图中对应的主回路广义调节器的传递函数为:
W T2
sW 2B
1
2
1T1isTds
则主回路广义调节器的等效比例带为:
2
2 1 1 2
此时主回路广义调节器中各参数可以通过试验得到的等效被
控对象W0(s)的输出端过热汽温θ2在减温水量WB扰动下的阶跃响 应曲线,按单回路控制系统整定方法进行计算:(P175表6-6)
(8-5)
则有:
W b 2SK zK T 2K fK 2 1 K T 2K fK 2K m 2K z
T 2 1 K T 2K fK 2K m 2K z S 1
令: K b 2 1 K K T z2 K K T 2 fK K 2 fK K m 2 2K z,T b 2 1 K T 2K T f2 K 2K m 2K z
Iθ 2 -
I 2 1 1
内回路
γθ2
W2(s) θ2
主回路原理方框图 如果主调节器为PID调节器,其传递函数为:
WT2
s
1
2
1T1is
Tds
忽略导前区的惯性和迟延,则简化后导前区传递函数为:
W1
s
1
WB
1
1
此时主回路原理方框图可以简化为:
华润海丰发电有限公司2机组INFIT优化控制系统调试方案
华润海丰发电有限公司#2机组INFIT优化控制系统热态调试方案2015年11月编写:审核:审定:批准:目录0 编写依据 (1)1 调试目的 (1)2 机组热态调试前准备工作 (1)3 INFIT协调优化控制系统试验 (1)INFIT协调优化控制系统初次投入 (2)INFIT协调优化控制系统变负荷试验 (3)INFIT协调优化系统正常运行检验 (4)4 INFIT汽温优化控制系统试验 (5)INFIT汽温优化控制系统初次投入 (5)INFIT汽温优化控制系统定值扰动试验 (6)INFIT汽温优化控制系统变负荷扰动试验 (7)5 INFIT脱硝优化控制系统试验 (7)INFIT脱硝优化控制系统初次投入 (7)INFIT脱硝优化控制系统定值扰动试验 (8)INFIT脱硝优化控制系统变负荷扰动试验 (9)6 凝结水变负荷特性试验 (9)500MW负荷点试验 (9)750MW负荷点试验 (10)7 INFIT凝结水优化系统试验 (11)INFIT凝结水优化系统初次投入 (11)INFIT凝结水优化系统定值扰动试验 (12)INFIT汽温优化控制系统变负荷扰动试验 (12)8 安全措施: (12)0 编写依据《火电厂启动调试工作规定》“火力发电厂分散控制系统技术规范”(G-RK-95-51)电规发(1995)74号文《火力发电厂模拟量控制系统验收测试标准》(DL/T 657-2006)《1000MW中间再热凝汽式汽轮发电机技术说明书》《1000MW直流炉技术说明书》《1000MW机组CCS及AGC控制策略SAMA图》《1000MW机组汽轮机电液调节系统SAMA图》1 调试目的本项目设计采用全新的实时优化控制装置INFIT系统取代#2机组原有DCS 中的AGC控制系统、过热汽温控制系统和再热汽温控制系统。
本次调试通过机组动态特性试验、INFIT投/切扰动试验、各项定值扰动试验和变负荷试验整定INFIT系统控制参数和检验INFIT系统的控制性能,确保INFIT系统的长期有效投用,从而使机组能在调度要求的AGC变负荷速率下以更优的控制品质稳定运行,全面提高机组自动控制水平。
过热汽温控制系统

第一部分 多容对象动态特性的求取控制对象是指各种具体热工设备,例如热工过程中的各种热交换器,加热炉、锅炉、贮 液罐及流体输送设备等。
尽管它们的结构和生产过程的物理性质很不相同,从控制的观点来 看它们在本质上有许多相似之处。
控制对象是自动控制系统中的一个重要组成部分。
它的输 出信号通常是生产过程中要求控制的被调量;它的输入信号是引起被调量变化的各种因素 (扰动作用和控制作用)。
对象的动态特性取决于它的内部过程的物理性质,设备的结构参数和运行条件等,原则 上可以用分析方法写出它的动态方程式。
但是由于一般热工对象内部过程的物理性质比较复 杂,加之运行过程中的一些实际条件很难全面予以考虑,因此用分析方法并不容易得到动态 特性的精确数学表达式。
比较常用的方法是在运行条件下通过实验来获得对象的动态特性。
根据测定到的对象阶跃响应曲线,可以把它拟合成近似的传递函数,根据阶跃响应曲线 求近似传递函数有很多方法,采用的传递函数在形式上也是各式各样 有自平衡能力的高阶对象的阶跃响应曲线如图所示:无迟延一阶对象阶跃响应曲线选定的传递函数的形式为()()1NKW S T S =+即采用一个n 阶等容惯性环节来近似表征。
上式中有三个待定的参数:放大系数K ,时间常数T 和阶数n ,传递函数的放大系数K 的求取方法按前面求取公式确定。
(1)作稳态值的渐近线y(∞),则()()0Y Y K μ∞-=∆在试验获得的阶跃响应曲线上,求得y(t 1)=0.4y(∞)及y(t 2)=0.8y(∞)时对应的时间 t 1、t 2 后,利用下式求阶数n :利用两点法公式可知(见《热工控制系统》谷俊杰,课本62 页公式):由曲线可知放大系数K ,利用两点法可确定t1,t2,利用如下公式计算对象阶次和惯性时间。
21.07510.521T N T T *⎛⎫=+ ⎪-⎝⎭122.16T T T N +≈上式求得的n 值不是整数时,应选用与其最接近的整数。