(仅供参考)消费级无人机的RCS测试
消费级无人机控制信号分析及反制

消费级无人机控制信号分析及反制消费级无人机的出现极大地丰富了人们的生活,无人机的应用众多,例如航拍、娱乐、农业、安全等领域。
随着无人机的普及,一些不法分子也开始利用无人机进行违法行为,比如侵犯他人隐私、携带违禁品等。
无人机的控制信号分析及反制显得尤为重要。
无人机的控制信号主要包括遥控器发出的指令和接收器接收的指令两个部分。
遥控器发出的指令是通过无线电信号传输到无人机上,而接收器接收的指令则是通过内置的无线电模块传输到飞行控制器上。
通过分析控制信号,可以了解无人机的工作原理和飞行模式。
1. 遥控器发出的指令分析遥控器发出的指令通常包括油门、方向和高度三个方面。
油门控制无人机的前进和停止,方向控制无人机的左右移动,高度控制无人机的升降。
这些指令通过遥控器上的摇杆或按钮发出,通过无线电信号传输到无人机上。
对于一些不法分子使用无人机进行违法行为的情况,我们需要对消费级无人机的控制信号进行反制,以确保公共安全和个人隐私。
1. 信号干扰信号干扰是一种常见的控制信号反制手段。
通过向无人机发送干扰信号,可以使其无法正确接收和解码遥控器发出的指令,从而使无人机失去控制,还可能导致无人机自动返航或紧急降落。
这种方法对消费级无人机的影响较大,但也存在一定的安全隐患,因此需要谨慎使用。
2. 信号屏蔽信号屏蔽是通过向无人机发送屏蔽信号,使其无法接收到遥控器发出的指令。
通常可以采用电磁波屏蔽器或GPS屏蔽器进行信号屏蔽,从而使无人机处于失控状态。
这种方法对无人机的影响较大,但需要在符合法律规定的情况下使用,以免造成不必要的麻烦。
3. 其他反制手段除了信号干扰和信号屏蔽,还可以采用其他一些反制手段,比如物理截获、电磁干扰等。
这些手段通常需要专业设备和人员进行操作,对无人机的影响较大,但也存在一定的安全隐患,因此需要谨慎使用。
三、消费级无人机的控制信号防护1. 加密技术采用加密技术对遥控器发出的指令进行加密处理,可以有效防止控制信号被不法分子解码破解。
消费级无人机影像数据快拼精度分析
消费级无人机影像数据快拼精度分析作者:古学玲来源:《锋绘》2018年第04期摘要:无人机遥感是近些年快速发展起来的新兴技术,低空遥感为测绘工作带来了更快速灵活、简单便捷的体验。
相对于专业级无人机而言,消费级无人机(UAV)具有快速便捷、机动灵活、易上手、性价比高等优势,是获取小区域4D数字产品的低成本生产方式。
然而目前针对该类无人机影像处理及精度分析的研究较少,导致其进一步推广受到一定影响。
本文选用大疆精灵4PRO(Phantom-4-PRO)消费级无人机在航高200-300m所拍摄影像,对其处理精度进行分析,选择Pix4D作为快拼处理软件,经过数据准备与预处理、参数设定、空中三角测量、数据生成等多个步骤,制作出数字正射影像图。
关键词:消费级无人机(UAV);快拼处理;空中三角测量;精度分析;厘米级1 引言无人机(UAV)遥感是近几年新兴发展起来的低空测量技术,应用领域已从军事扩展到商用、民用市场(李德仁和李明,2014),用途也从最初的遥感测绘发展至如今的监测巡检等。
与传统卫星及航空遥感相比,无人机获取数据具有灵活便捷、上手快、成本低及分辨率高等优势(Watts等,2012;陈仲新等,2016)。
无人机的应用领域迅速扩展,也让无人机成为一个研究热门课题。
2 研究区概况本文选取四川省沐川县三溪村为测区,三溪村是四川省环境优美示范村庄,其经度为103°53′24″E,纬度为28°56′24″N。
该村地处丘陵地貌,地势较低,但起伏较大,植被覆盖率约75%-80%,测区范围1.3km*1.3km,面积为1.69km2,因飞行区域视野开阔,卫星信号较好,有利于进行消费级无人机的飞行实验。
3 数据处理本文选择采用Pix4D快拼软件处理,该软件自动化流程程度较高,一键式作业完成数据准备、参数设定、连接点自动匹配、自动空中三角测量、数据生成等多个步骤,处理后可在质量报告中查看平均精度和绝对精度。
无人机载设备 设备检验方法和标准

无人机载设备设备检验方法和标准今天咱们来唠唠无人机载设备的检验方法和标准哈。
一、外观检验。
咱先从外观瞅起。
就像挑水果一样,先看无人机载设备的外壳有没有破损呀,划痕啥的。
要是外壳都破破烂烂的,那里面的零件可能也不太安全呢。
比如说,要是有个小裂缝,说不定哪天飞着飞着就散架了,那可不得了。
还有啊,看看那些接口,得是整整齐齐的,没有歪歪扭扭或者被损坏的迹象。
就像人的嘴巴,要是歪了,吃东西都不方便,设备接口坏了,数据传输啥的肯定也会出问题呀。
二、功能检验。
再说说功能方面的检验。
这就像检查一个人的各种技能一样。
对于无人机载设备,比如说摄像头吧,如果是用来拍照或者录像的设备,那咱就得看看拍出来的画面清不清楚。
可不能模模糊糊的,像近视眼没戴眼镜似的。
测试的时候,可以在不同的光线条件下拍拍看,强光下、弱光下都要试。
还有那些传感器,就像是设备的小耳朵小鼻子,要检查它们是不是灵敏。
像检测高度的传感器,把无人机升高降低,看看它反馈的数据准不准。
如果数据老是出错,那无人机就可能飞着飞着就撞到东西啦,多危险呀。
三、性能检验。
性能检验也很重要哦。
这就好比看一个人干活儿厉不厉害。
拿无人机载设备的电池来说,要看看它的续航能力咋样。
总不能飞一会儿就没电了,那就像刚出门就没力气的小娃娃。
可以模拟正常飞行任务,看看电池能撑多久。
还有设备的稳定性也不能忽视。
在空中的时候,设备不能晃来晃去的,得稳稳当当的。
要是设备老是晃动,那采集的数据或者拍摄的画面肯定也是晃得人眼晕,根本没法用呀。
四、标准方面。
那关于标准呢,不同类型的无人机载设备是有不同的标准的。
就像不同的比赛有不同的规则一样。
一般来说,都有一些行业内公认的安全标准。
比如说设备的电磁兼容性,不能干扰其他设备的正常工作,也不能被其他设备轻易干扰。
还有重量方面的标准,太重了的话,无人机可能都飞不起来或者飞起来很吃力。
在精度方面也有标准,像定位精度,必须达到一定的数值范围,这样才能保证无人机准确地到达它该去的地方,完成任务呀。
RCS系列测控装置技术和使用说明书
2.1 装置主要功能 .....................................................3 2.2 CPU 板主要功能 ....................................................4
2.2.1 遥测采集及计算.................................................. 5 2.2.2 遥信测量........................................................ 6 2.2.3 遥控输出........................................................ 6 2.2.4 GPS 对时 ........................................................ 6 2.2.5 通信............................................................ 6
3.3 RCS-9603 测控装置 ................................................23 3.3.1 装置典型应用................................................... 23 3.3.2 硬件结构....................................................... 23
3. 装置技术说明.........................................................7
浅谈无人机雷达隐身技术
• 132•无人机问世至今已被广泛应用于军事,近年来随着防空力量需求的不断增加,东西方军事强国对现代无人机的研究与应用日趋深入。
而无人机的隐身性能直接影响其生存能力及军事任务完成与否,因此无人机隐身技术备受关注。
本文综述分析了现代无人机雷达隐身技术原理及其发展现状,并进一步探讨了无人机雷达隐身技术的发展趋势。
1 引言科技进步带来了现代通讯技术和雷达探测技术的突飞猛进,战争中敌对双方目标搜索、识别、跟踪、攻击的能力显著提高,攻防速度明显提升。
武器装备平台在现代信息化战争中所处的环境日趋复杂,传统武器系统的生存受到了越来越严峻的考验,时刻受到来自敌对方的电磁干扰以及地面、空中的火力威胁,除此之外,敌方的雷达、红外、激光等探测器还时刻严密监视着己方的一举一动。
现代战争日趋呈现陆、海、空、天、电磁五位一体立体化,在战争中把握先机最重要和最有效的突防战术技术手段,就是发展隐身技术,提高武器系统生存、突防和纵深打击能力。
可以预见,隐身无人机必将成为21世纪军事斗争领域的“尖兵之翼”,在新式战争中担任重要角色,并对未来的战争形态、组织模式以及军事话语权的争夺产生深远影响。
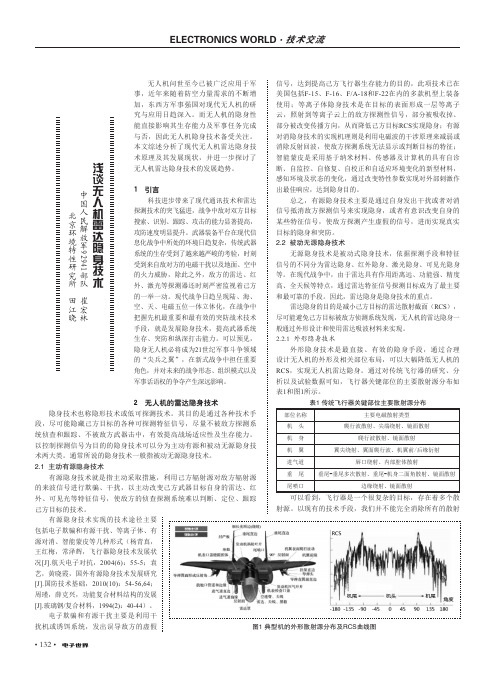
2 无人机的雷达隐身技术信号,达到提高己方飞行器生存能力的目的,此项技术已在美国包括F-15、F-16、F/A-18和F-22在内的多款机型上装备使用;等离子体隐身技术是在目标的表面形成一层等离子云,照射到等离子云上的敌方探测性信号,部分被吸收掉、部分被改变传播方向,从而降低己方目标RCS 实现隐身;有源对消隐身技术的实现机理则是利用电磁波的干涉原理来减弱或消除反射回波,使敌方探测系统无法显示或判断目标的特征;智能蒙皮是采用基于纳米材料、传感器及计算机的具有自诊断、自监控、自修复、自校正和自适应环境变化的新型材料,感知环境及状态的变化,通过改变特性参数实现对外部刺激作出最佳响应,达到隐身目的。
总之,有源隐身技术主要是通过自身发出干扰或者对消信号抵消敌方探测信号来实现隐身,或者有意识改变自身的某些特征信号,使敌方探测产生虚假的信号,进而实现真实目标的隐身和突防。
基于消费级无人机航测精度验证研究
YAN JIU
图1 高精度场地三维模型成果
YAN JIU
图2 高程文件对比(蓝色的点是由手持 RTK 采集的,白
色的点是由无人机航拍采集)
对比显示,无论采用人工RTK现场实测或无人机全自动测量技术,都可以准确的在南方cass 中描绘出现场
图3 人工RTK实测
图4 无人机全自动测量
土方结果对比:
测试结果表明,使用DJI精灵 Phantom 4 RTK 的无人机测量方案,与传统直接使用手持RTK方案,两者在土方计算的结果上相差不到 2 % ,由于无人机能够采集到更多的地貌特征点表达地形,并且能有效避免人工作业过程中的漏测和错测问题,理论土方量精确程度更优于传统测量方案。
九、结语。
微波毫米波RCS测试系统-Ceyear
微波毫米波RCS测试系统产品综述微波毫米波RCS测试系统主要应用于飞机、战车、导弹、舰船等装备雷达隐身性能测试与评估领域,具有RCS精确测试与评估、目标体强散射分布成像与诊断、目标局部散射特性成像分析、隐身涂层修复效果评估等功能。
系统以矢量网络分析仪为核心仪器,通过外配天线、校准件、运动装置等设备,可满足1~40GHz频段雷达散射特性测试需要,选配扩频设备后,可实现到325GHz毫米波频段的覆盖。
系统具有智能化程度高、配置灵活、测量速度快、精度高、参数种类齐全等特点。
在该系统平台基础上,中电科仪器仪表有限公司还可提供近/远场测试方法、暗室/室外场测试方案选型及场地环境设计,扫描架/转台及测试仪器设备对比选型,以及全系统集成设计与施工等服务,全面满足用户需求。
主要特点◆一维、二维、三维RCS成像功能,可实现目标体强散射分布的成像诊断分析;◆目标体局部散射特性快速成像功能,可在现场环境近距离下完成快速成像;◆近场测试外推远场RCS技术,扩展用户测试范围;◆系统配置形式灵活,可以灵活选择本振、发射源的形式,快速方便地实现频率扩展;◆多域测量功能,系统提供频域、时域、角域三种测量模式;◆RCS测量校准功能,可有效消除测量误差对测量结果的影响,提高测量精度;◆硬件时域门功能,利用脉冲测量技术实现背景干扰抑制,提高测量精度;◆独立的外部中频输入接口,可以实现外部中频接入,提高系统使用灵活性;●一维、二维、三维RCS成像功能系统具备一维、二维、三维RCS成像能力,满足用户对各种复杂目标体散射点分布情况进行分析诊断的测试需要。
●局部散射特性快速成像功能系统采用天线阵列电扫控制技术、近场多维空间散射成像与干扰滤波处理技术,实现了非标准外场环境下的快速成像,成像分辨率达厘米级。
●毫米波高分辨率成像功能系统利用毫米波频率高、带宽大的特点,采用线性调频工作体制,配合扫描架快速二维扫描,获取待测目标的全3D信息,实现高分辨率三维成像或二维层析成像,可广泛用于复合材料检测、内部缺陷判断、食品检测等无损检测领域。
消费级无人机的RCS测试
Deviations From Baseline
Polarization Change
VV-Pol
EL = 0°, AZ = 6°
HH-Pol
EL = 0°, AZ = 6°
Max = -13.5 dBsm
Max = -15.3 dBsm
•
HH-Pol: weaker battery return, stronger motor return.
Azimuth Scan Elevation Scan
EL = 0°, AZ = 90°
EL = -90°, AZ = 0°
Max = -9.3 dBsm
Max = -9.0 dBsm
11
Larger Drones: 3DR Solo
3DR Solo (46 cm diagonal) 12-15 GHz
EL = 0°, AZ = 90°
Max = -24.2 dBsm
12
Larger Drones: DJI Inspire 1
DJI Inspire 1 (56 cm diagonal) 12-15 GHz
EL = 0°, AZ = 270°
Max = -3.0 dBsm
3-6 GHz
• • • •
14
In-Situ Measurement Using a UWB Radar
• PulsON 440 (P440) ultra-wideband (UWB) radar by Time Domain Corporation. • Emits short pulses at a pulse repetition frequency of 10 MHz. • Equivalent frequency bandwidth from 3.1 to 5.3 GHz centered at 4.3 GHz.
雷达散射截面测量书
雷达散射截面测量书雷达散射截面测量是一种用于评估目标物体对雷达波的反射能力的技术。
雷达散射截面(RCS)是一个物体对雷达波的反射截面积,它是衡量目标物体的散射能力的重要指标。
通过测量目标物体的雷达散射截面,我们可以了解其在雷达系统中的探测能力、隐身性能以及电磁环境中的特征。
雷达散射截面测量是通过将目标物体与雷达系统进行实际的测量来实现的。
通常,测量过程需要在一个特定的测试场地进行,以确保测量结果的准确性和可靠性。
在测量过程中,雷达系统会发射一束特定频率的雷达波,然后接收目标物体反射回来的信号。
通过分析接收到的信号,可以计算出目标物体的雷达散射截面。
为了获得准确的测量结果,测量过程中需要考虑多种因素。
首先,雷达系统的参数和性能必须准确地设置和控制,以确保发射和接收的信号质量良好。
其次,目标物体的位置、姿态和运动状态也会对测量结果产生影响,因此需要进行准确的目标物体定位和跟踪。
此外,环境条件,如天气和地形,也可能对测量结果产生干扰,因此需要进行相应的校正和补偿。
雷达散射截面测量在军事、航空航天、无人机和雷达技术等领域具有重要的应用价值。
首先,通过测量目标物体的雷达散射截面,可以评估其在雷达系统中的探测概率和探测距离,从而帮助军事部门评估目标的威胁程度和采取相应的防御措施。
其次,通过测量目标物体的雷达散射截面,可以评估其在电磁环境中的特征,从而帮助航空航天和无人机领域设计和优化相应的雷达系统和设备。
在雷达散射截面测量中,还存在一些挑战和难点。
首先,目标物体的形状、材料和表面特性会对雷达散射截面产生影响,因此需要进行相应的建模和仿真分析。
其次,目标物体的尺寸和距离也会对雷达散射截面产生影响,因此需要进行多尺度和多距离的测量和分析。
此外,目标物体的多径效应和杂波干扰也可能对测量结果产生干扰,因此需要进行相应的信号处理和滤波技术。
雷达散射截面测量是一种评估目标物体对雷达波反射能力的重要技术。
通过测量目标物体的雷达散射截面,我们可以了解其在雷达系统中的探测能力、隐身性能以及电磁环境中的特征。
一种外场雷达RCS测量方法
一种外场雷达RCS测量方法贾继鹏;段其省【摘要】随着测量雷达的职能使命进一步扩展,不只需要测量目标的位置信息,雷达目标特性测量也越来越重要,随着雷达测量技术的发展,越来越多的RCS测量方法被广泛使用.本文在对RCS测量技术研究的基础上,结合目前多数测量雷达没有RCS测量功能,提出了一种比较测量法,并给出了实例验证,证明了此方法的有效性.【期刊名称】《电子测试》【年(卷),期】2019(000)009【总页数】3页(P64-65,67)【关键词】测量雷达;RCS;目标特性【作者】贾继鹏;段其省【作者单位】中国人民解放军91245部队,辽宁葫芦岛,125000;中国人民解放军91245部队,辽宁葫芦岛,125000【正文语种】中文0 引言暴露在电磁场中的物体将入射能量向各个方向散开,这种能量的空间分布称为散射,物体本身称为散射体,返回波源方向的能量形成物体的雷达回波。
回波的强度用物体的雷达反射截面(Radar Cross Section, RCS)来描述。
目标的RCS包含目标的形状、尺寸等重要信息,是雷达能够获得的关于目标电磁散射特性的主要物理量,随着测量技术的发展,人们越来越重视目标RCS的测量,以便获取目标形状、尺寸等测量信息,使测量信息更加精确、更加丰富。
目前测量雷达最基本的任务是探测目标,并对目标距离、方位、俯仰等位置信息进行测量,没有对目标RCS测量的能力。
但随着职能使命的拓展,测量雷达测量不仅希望取得被测目标的外弹道信息,还希望取得更多的有关目标特征信息,从而推导出目标的形状、尺寸等信息,已达到目标识别的目的。
通过分析雷达方程,本文介绍一种比较测量方法,在不改变现有雷达结构的基础上,通过测量已知RCS的标准目标,进行比较,对雷达测量数据进行处理,能够有效地测量被测目标的RCS,实例结果验证了此方法的有效性。
1 RCS比较测量方法RCS是接收机处的散射功率密度与目标处的入射功率之比,其正式定义为:式中,oE是照射到目标处的入射波的电场强度,sE是雷达所在处的散射波的电场强度,R为雷达到目标的距离。