电机图纸(定转子) (1)
三相异步电动机等效电路及解析

7.2 三相异步电动机的空载运行三相异步电动机的定子与转子之间是通过电磁感应联系的。
定子相当于变压器的一次绕组,转子相当于二次绕组,可仿照分析变压器的方式进行分析。
7.2.1 空载运行的电磁关系当三相异步电动机的定子绕组接到对称三相电源时,定子绕组中就通过对称三相交流电流,三相交流电流将在气隙内形成按正弦规律分布,并以同步转速n 1弦转的磁动势F 1。
由旋转磁动势建立气隙主磁场。
这个旋转磁场切割定、转子绕组,分别在定、转子绕组内感应出对称定子电动势,转子绕组电动势和转子绕组电流。
空载时,轴上没有任何机械负载,异步电动机所产生的电磁转矩仅克服了摩擦、风阻的阻转矩,所以是很小的.电机所受阻转矩很小,则其转速接近同步转速,n ≈n 1,转子与旋转磁场的相对转速就接近零,即n 1—n ≈0。
在这样的情况下可以认为旋转磁场不切割转子绕组,则E 2s ≈0(“s"下标表示转子电动势的频率与定子电动势的频率不同),I 2s ≈0.由此可见,异步电动机空载运行时定子上的合成磁动势F 1即是空载磁动势F 10,则建立气隙磁场B m 的励磁磁动势F m 0就是F 10,即F m 0=F 10,产生的磁通为Φm 0.励磁磁动势产生的磁通绝大部分同时与定转子绕组交链,这部分称为主磁通,用φm 表示,主磁通参与能量转换,在电动机中产生有用的电磁转矩。
主磁通的磁路由定转子铁心和气隙组成,它受饱和的影响,为非线性磁路.此外有一小部分磁通仅与定子绕组相交链,称为定子漏磁通φ1σ.漏磁通不参与能量转换并且主要通过空气闭合,受磁路饱和的影响较小,在一定条件下漏磁通的磁路可以看做是线性磁路。
为了方便分析定子、转子的各个物理量,其下标为“1”者是定子方,“2”者为转子方。
异步电动机在正常工作时的一些电磁关系在转子不转时就存在,利用转子不动时分析有助于理解其电磁过程。
一、转子不转时(转子绕组开路)异步电动机内的电磁过程转子绕组开路时,转子电流为零,定子电势和转子电势的大小、频率1E •、2E •和1f ;1)转子绕组开路,定子绕组接三相交流电源, 定子绕组中产生三相对称正弦电流(空载电流),形成幅值固定的气隙旋转磁场,旋转速度为1160f n p =; 2)由于转子不动,旋转磁场在定子绕组、转子绕组中感生频率均为1f 的正弦电动势; 11111222224.444.44{N N E j f k N E j f k N =-Φ=-Φ (7.2)式中k N1、 N 1 ——定子 每相有效串联匝数。
交流电动机(图解说明)
电动机的分类:
电动机
交流电动机
异步机 同步机
鼠笼式 绕线式
直流电动机 他励、异励、串励、复励
鼠笼式交流异步电动机授课内容: 基本结构、工作原理、 机械特性、控制方法
§8.1 三相异步电动机的构造
定子绕组
三相定子绕组:产生旋转 磁场。
转子:在旋转磁场作用下,
(三相)
A
Y
定子
Z
产生感应电动势或
电流。
f2
n0 60
n
P
n0 n0
n
n0 60
P
Sf1
§8.4 三相异步电动机的转矩与机械特性
8.4.1 转矩公式 电磁转矩 T:转子中各载流导体在旋转磁场的作用下,
受到电磁力所形成的转距之总和。
T KTΦmI2 cos2
常数 每极磁通
转子电流
转子电路的
cos2
I2
其中
E2
R22
X
2 2
SE20 R22 (SX 20 )2
U2
分析规定: 电流 I 为正时,从首端流入、末端流出; 电流 I 为负时,从首端流出、末端流入。
旋转磁场的连续观察
S N
S
U1
N
V2 W2
W1 V1
U2
S
N
2、旋转磁场的旋转方向
旋转方向:取决于三相电流的相序。
iA iB iC
iA iC
Im
Im
t
iB t
n0
n0
改变电机的旋转方向的方法:改变相序(换接其中两相)
( 3 ) 起动转矩 Tst:
电机起动时的转矩。
n
n
T
K
R22
无刷电机工作及控制原理(图解)

无刷电机工作及控制原理(图解)左手定则,这个就是电机转动受力分析得基础,简单说就就是磁场中得载流导体,会受到力得作用。
让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力得方向,我相信喜欢玩模型得人都还有一定物理基础得哈哈.让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生得电动势方向。
为什么要讲感生电动势呢?不知道大家有没有类似得经历,把电机得三相线合在一起,用手去转动电机会发现阻力非常大,这就就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生与转动方向相反得力,大家就会感觉转动有很大得阻力。
不信可以试试.三相线分开,电机可以轻松转动三相线合并,电机转动阻力非常大右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指得那一端就就是通电螺旋管得N极。
状态1当两头得线圈通上电流时,根据右手螺旋定则,会产生方向指向右得外加磁感应强度B(如粗箭头方向所示),而中间得转子会尽量使自己内部得磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了。
当转子磁场方向与外部磁场方向垂直时,转子所受得转动力矩最大.注意这里说得就是“力矩”最大,而不就是“力”最大。
诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了。
补充一句,力矩就是力与力臂得乘积。
其中一个为零,乘积就为零了.当转子转到水平位置时,虽然不再受到转动力矩得作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管得电流方向,如下图所示,转子就会继续顺时针向前转动,状态2如此不断改变两头螺线管得电流方向,内转子就会不停转起来了。
改变电流方向得这一动作,就叫做换相。
补充一句:何时换相只与转子得位置有关,而与其她任何量无直接关系。
第二部分:三相二极内转子电机一般来说,定子得三相绕组有星形联结方式与三角联结方式,而“三相星形联结得二二导通方式”最为常用,这里就用该模型来做个简单分析。
第5章 三相异步电动机的基本原理(电机及拖动基础)

第五章三相异步电动机的基本原理主要讲授内容:三相异步电动机的工作原理、结构、运行特性、等效电路、参数测量、转矩转差的关系等,是必须掌握的内容,使本课程的重点。
是在现代工业中正被大量应用的机电能量转换装置,是后续课程《电力拖动》课程的基础。
讨论:三相异步电动机What?三相异步电动机的用途、结构?How?三相异步电动机的工作原理?第一节三相异步电动机的结构及额定参数一、异步电动机的主要用途和分类用途:异步电机主要用作电动机,拖动各种生产机械。
异步电动机的优点:结构简单、容易制造、价格低廉、运行可靠、坚固耐用、运行效率较高和具有适用的工作特性。
采用现代电力电子功率器件和计算机技术可得到良好的调速性能。
已经取代直流电动机,成为应用广泛的调速系统。
异步电动机的缺点:功率体积比较小。
功率因数较差。
直接接电网运行时,必须从电网里吸收滞后的励磁电流,使它的功率因数总是小于1。
通过控制器可以使这一缺点得到改善。
异步电动机运行时,定子绕组接到交流电源上,转子绕组自身短路,由于电磁感应的关系,在转子绕组中产生电动势、电流,从而产生电磁转矩。
所以,异步电机又叫感应电机。
二、异步电动机的分类从不同角度看,有不同的分类法:(1)按定子相数分有①单相;②三相异步电动机。
(2)按转子结构分有①绕线式;②鼠笼式。
后者又包括单鼠笼、双鼠笼和深槽式异步电动机。
此外,根据电机定子绕组上所加电压的大小,又有高压、低压异步电动机之分。
从其它角度看,还有高起动转矩、高转差率、高转速异步电机等等。
异步电机也可作为异步发电机使用。
单机使用时,常用于电网尚未到达的地区,又没有同步发电机的情况,或用于风力发电等特殊场合上。
在异步电动机的电力拖动中,异步电机回馈制动时,即运行在异步发电机状态。
风叶铁心绕组轴承滑环绕线电动机转子笼型绕组导条端环1、异步电动机的定子:异步电动机的定子是由机座、定子铁心和定子绕组三个部分组成的。
(1)定子铁心:是电动机磁路的一部分,装在机座里。
三相异步电动机的设计及优化(Y160M2-2_15kW)

本科生毕业设计(论文)开题报告题目:三相异步电动机的设计及优化(Y160M2-2 15kw)学院:信息工程学院系电气与自动化工程系专业:电机电器班级:电机电器06级1班学号:6101106047姓名:丁康峰指导教师:肖倩华填表日期:2010 年 4 月 5 日一、选题的依据及意义在自然界各种能源中,电能具有大规模集中生产、远距离经济传输、智能化自动控制的突出特点,它不但成为人类生产和活动的主要能源,而且对近代人类文明的产生和发展起到了重要的推动作用。
与此相呼应,作为电能生产、传输、使用和电能特性变化的核心装备,电机在现代社会所有行业和部门中也占据着越来越重要的地位。
纵观电机的发展,其应用范围不断扩大,使用要求不断提高,结构类型不断增多,理论研究也不断深入。
特别是近30年来,随着电力电子技术和计算机技术的进步,尤其是超导技术的重大突破和新原理;新结构;新材料;新工艺;新方法的不断推动,电机发展更是呈现出勃勃生机,其前景是不可限量的。
在现代社会中,电能是现代社会最主要的能源之一。
在电能的生产、输送和使用等方面,电机起着重要的作用。
电机主要包括发电机、变压器和电动机等类型。
发电机是将其他形式的能源转换成电能的机械设备,它由水轮机、汽轮机、柴油机或其他动力机械驱动,将水流,气流,燃料燃烧或原子核裂变产生的能量转化为机械能传给发电机,再由发电机转换为电能。
发电机在工农业生产,国防,科技及日常生活中有广泛的用途。
电动机将电能转换成为机械能,用来驱动各种用途的生产机械。
机械制造工业、冶金工业、煤炭工业、石油工业、轻纺工业、化学工业及其他各种矿企业中,广泛地应用各种电动机。
例如,在交通运输中,铁道机车和城市电车是由牵引电机拖动的;在航运和航空中,使用船舶电机和航空电机;在农业生产方面,电力排灌设备、打谷机、榨油机等都是由电动机带动的;在国防、文教、医疗及日常生活中,也广泛应用各种小功率电机和微型电机。
大家应该都知道,电动机的转动是靠电能,电能在日常生活中的作用。
电机基础常识
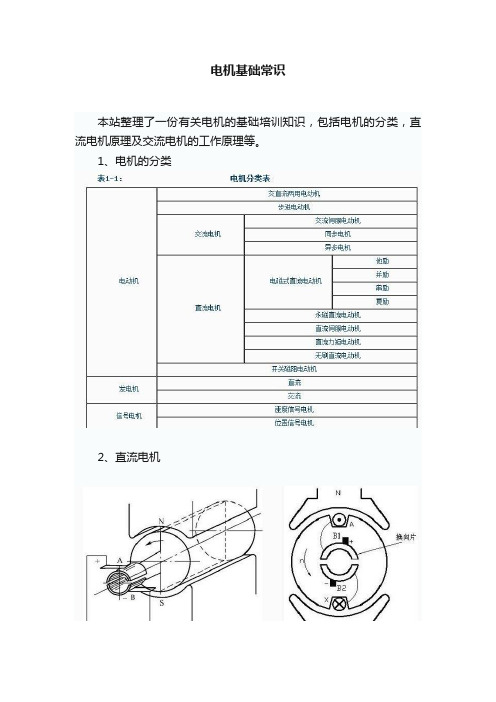
电机基础常识本站整理了一份有关电机的基础培训知识,包括电机的分类,直流电机原理及交流电机的工作原理等。
1、电机的分类2、直流电机图2-1:直流电机的物理模型图图2-1表示一台最简单的两极直流电机模型,它的固定部分称为定子,上面装设了一对直流励磁(或是永磁铁)的主磁极N和S;旋转部分称为转子,上面装设电枢铁心;定子与转子之间有一气隙。
电枢铁心表面上放置了由A和X两根导体连成的电枢线圈(绕组),线圈的首端和末端分别连到两个圆弧形的铜片上,此铜片称为换向片。
换向片之间互相绝缘,由换向片构成的整体称为换向器。
换向器固定在转轴上,换向片与转轴之间亦互相绝缘。
在换向片上放置着一对固定不动的电刷B1和B2与换向器接触。
整个旋转部分为机电能量转换中枢,故称电枢。
电枢旋转时,电枢线圈通过换向片和电刷与外电路接通。
2.1直流电机工作原理图2-2:直流电动机工作原理示意图将外部直流电源加于电刷A(正极)和B(负极)上,则线圈abcd中流过电流,在导体ab中,电流由a指向b,在导体cd中,电流由c指向d。
导体ab和cd分别处于N、S极磁场中,受到电磁力的作用。
用左手定则可知导体ab和cd均受到电磁力的作用,且形成的转矩方向一致,这个转矩称为电磁转矩,为逆时针方向。
这样,电枢就顺着逆时针方向旋转,如图2-2(a)所示。
当电枢旋转180°,导体cd转到N极下,ab转到S极下,如图2-2(b)所示,由于电流仍从电刷A流入,使cd中的电流变为由d流向c,而ab中的电流由b流向a,从电刷B流出,用左手定则判别可知,电磁转矩的方向仍是逆时针方同。
由此可见,加于直流电动机的直流电源,借助于换向器和电刷的作用,使直流电动机电枢线圈中流过的电流,方向是交变的,从而使电枢产生的电磁转矩的方向恒定不变,确保直流电动机朝确定的方向连续旋转。
这就是直流电动机的基本工作原理。
简单来说,直流电动机就是利用通电导体在磁场中受力运动而“切割”其磁力线的原理工作的。
无刷电机工作及控制原理(图解)

无刷电机工作及控制原理(图解)左手定则,这个是电机转动受力分析的基础,简单说就是磁场中的载流导体,会受到力的作用。
让磁感线穿过手掌正面,手指方向为电流方向,大拇指方向为产生磁力的方向,我相信喜欢玩模型的人都还有一定物理基础的哈哈。
让磁感线穿过掌心,大拇指方向为运动方向,手指方向为产生的电动势方向。
为什么要讲感生电动势呢?不知道大家有没有类似的经历,把电机的三相线合在一起,用手去转动电机会发现阻力非常大,这就是因为在转动电机过程中产生了感生电动势,从而产生电流,磁场中电流流过导体又会产生和转动方向相反的力,大家就会感觉转动有很大的阻力。
不信可以试试.三相线分开,电机可以轻松转动三相线合并,电机转动阻力非常大右手螺旋定则,用右手握住通电螺线管,使四指弯曲与电流方向一致,那么大拇指所指的那一端就是通电螺旋管的N极。
状态1当两头的线圈通上电流时,根据右手螺旋定则,会产生方向指向右的外加磁感应强度B(如粗箭头方向所示),而中间的转子会尽量使自己内部的磁感线方向与外磁感线方向保持一致,以形成一个最短闭合磁力线回路,这样内转子就会按顺时针方向旋转了.当转子磁场方向与外部磁场方向垂直时,转子所受的转动力矩最大.注意这里说的是“力矩"最大,而不是“力”最大。
诚然,在转子磁场与外部磁场方向一致时,转子所受磁力最大,但此时转子呈水平状态,力臂为0,当然也就不会转动了.补充一句,力矩是力与力臂的乘积。
其中一个为零,乘积就为零了。
当转子转到水平位置时,虽然不再受到转动力矩的作用,但由于惯性原因,还会继续顺时针转动,这时若改变两头螺线管的电流方向,如下图所示,转子就会继续顺时针向前转动,状态2如此不断改变两头螺线管的电流方向,内转子就会不停转起来了。
改变电流方向的这一动作,就叫做换相。
补充一句:何时换相只与转子的位置有关,而与其他任何量无直接关系。
第二部分:三相二极内转子电机一般来说,定子的三相绕组有星形联结方式和三角联结方式,而“三相星形联结的二二导通方式”最为常用,这里就用该模型来做个简单分析。
电机制造工艺学课件

0.7h
跳 圆跳动 动
全跳动
h
h
60
最大实
1.4h
体
M
60
1.4h
延伸公差
带
P
2、公差框格符号
(1)在图样上标注形位公差时,一般都用公差框格符 号。(表明对被测要素的形位精度要求)
(2)用细实线画(图上有4种形式)
2h
1、两格型
0.005 一般用于形状公差
2h
2、三格型
常用于单一基准
0.02 A
(上偏差、下偏差)
孔公差带 + 0 -
轴公差带
18
基本尺寸
19
二、形位公差
行为误差是客观存在的,为了满足产品的性能要求, 在图纸上必须规定相应的公差和公差带,以便对形状位 置误差进行控制。
形位公差是一个给定值,它是被测要素的实际形状相 对于理想形状所允许的最大变化量,公差是一个区域。
1、项目符号
分 公差项 类目
A2
线目标
3、当基准目标为局部
表面时,用双点划线
绘出局部表面的图形, 并画出 的4细5 剖面
线。
Ø20 A5
24
0.7h
00..7h7h
四、形位误差分布限制符号
(1)被测要素的形位误差需要限制时,用此符 号。
(2)分布类型、符号、图示如下:
1 0.03(+) 或(-)
25
26
2
A
0.02 ( )
A
1
中凸型(+)
外
说明:被测要素存在形 形
位误差时,只允许两
端向中间材料连续增
加。(例如车床安装
时,中间凸起耐磨。)