一种水上落点定位方法研究-南京大学学报自然科学
水下相机在微地貌动态过程研究中的应用-南京大学学报自然科学
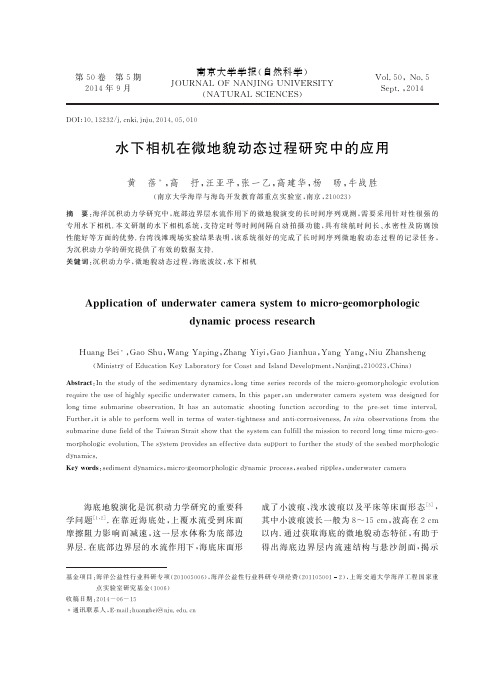
第50卷 第5期2014年9月南京大学学报(自然科学)J O U R N A L O FN A N J I N G U N I V E R S I T Y(N A T U R A LS C I E N C E S)V o l .50,N o .5S e pt .,2014基金项目:海洋公益性行业科研专项(201005006),海洋公益性行业科研专项经费(2011050012),上海交通大学海洋工程国家重点实验室研究基金(1006)收稿日期:2014-06-15*通讯联系人,E -m a i l :h u a n g b e i @n ju .e d u .c n D O I :10.13232/j .c n k i .j n ju .2014.05.010水下相机在微地貌动态过程研究中的应用黄 蓓*,高 抒,汪亚平,张一乙,高建华,杨 旸,牛战胜(南京大学海岸与海岛开发教育部重点实验室,南京,210023)摘 要:海洋沉积动力学研究中,底部边界层水流作用下的微地貌演变的长时间序列观测,需要采用针对性很强的专用水下相机.本文研制的水下相机系统,支持定时等时间间隔自动拍摄功能,具有续航时间长㊁水密性及防腐蚀性能好等方面的优势.台湾浅滩现场实验结果表明,该系统很好的完成了长时间序列微地貌动态过程的记录任务,为沉积动力学的研究提供了有效的数据支持.关键词:沉积动力学,微地貌动态过程,海底波纹,水下相机A p p l i c a t i o no f u n d e r w a t e r c a m e r a s y s t e mt om i c r o -g e o m o r p h o l o gi c d yn a m i c p r o c e s s r e s e a r c h H u a n g B e i *,G a oS h u ,W a n g Y a p i n g ,Z h a n g Y i y i ,G a o J i a n h u a ,Y a n g Y a n g ,N i uZ h a n s h e n g(M i n i s t r y o fE d u c a t i o nK e y L a b o r a t o r y f o rC o a s t a n d I s l a n dD e v e l o p m e n t ,N a n j i n g,210023,C h i n a )A b s t r a c t :I n t h e s t u d y o f t h e s e d i m e n t a r y d y n a m i c s ,l o n g t i m e s e r i e s r e c o r d so f t h em i c r o -g e o m o r p h o l o g i ce v o l u t i o n r e q u i r e t h eu s e o f h i g h l y s p e c i f i cu n d e r w a t e r c a m e r a .I nt h i s p a p e r ,a nu n d e r w a t e r c a m e r as y s t e m w a sd e s i gn e df o r l o n g t i m es u b m a r i n eo b s e r v a t i o n .I th a sa na u t o m a t i cs h o o t i n g f u n c t i o na c c o r d i n g t ot h e p r e -s e tt i m ei n t e r v a l .F u r t h e r ,i t i s a b l e t o p e r f o r m w e l l i n t e r m so fw a t e r -t i g h t n e s s a n da n t i -c o r r o s i v e n e s s .I n s i t u o b s e r v a t i o n s f r o mt h e s u b m a r i n ed u nef i e l d o f t h eT a i w a nS t r a i t s h o wt h a t t h e s y s t e mc a n f u l f i l l t h em i s s i o n t o r e c o r d l o ng t i m em i c r o -g e o -m o r ph o l o gi c e v o l u t i o n .T h e s y s t e m p r o v i d e s a n e f f e c t i v e d a t a s u p p o r t t o f u r t h e r t h e s t u d y o f t h e s e a b e dm o r p h o l o g i c d yn a m i c s .K e y w o r d s :s e d i m e n t d y n a m i c s ,m i c r o -g e o m o r p h o l o g i c d y n a m i c p r o c e s s ,s e a b e d r i p p l e s ,u n d e r w a t e r c a m e r a 海底地貌演化是沉积动力学研究的重要科学问题[1,2].在靠近海底处,上覆水流受到床面摩擦阻力影响而减速,这一层水体称为底部边界层.在底部边界层的水流作用下,海底床面形成了小波痕㊁浅水波痕以及平床等床面形态[3],其中小波痕波长一般为8~15c m ,波高在2c m 以内.通过获取海底的微地貌动态特征,有助于得出海底边界层内流速结构与悬沙剖面,揭示南京大学学报(自然科学)第50卷该环境中的完整流速剖面分布㊁底部摩阻特征和机制㊁紊动耗散与动量传输以及沉积物输运规律,促进浅海沉积动力学㊁乃至颗粒态物理学研究的进一步深入[4].本文采用自制水下相机,有效获取了一定面积范围内的连续时间序列的微地貌形态变化,有助于进一步深入了解海床沉积和侵蚀变化过程及其规律.1 系统设计现有的商用水下相机主要用于海岛旅游,其各项参数的设置主要针对浮潜或18m 以浅潜水休闲项目的水下拍照,因此在自动控制㊁续航能力㊁防水性能㊁光照位置㊁防腐蚀性能等各方面均不能满足浅海沉积动力学研究中微地貌动态过程的观测.本文研制的水下相机系统要解决目前商用水下相机不支持自动拍照功能㊁续航时间短㊁水密性及防腐蚀性能不足等方面的问题.1.1 外观结构 图1为长时间序列海底地形演化记录水下相机结构示意图.本系统的外壳采用中空圆柱体,玻璃取景器位于顶盖的中央,顶盖和壳体之间使用螺栓连接,通过O 圈保持其在200m 水深以浅区域的水密性.系统主控部件㊁相机模块及锂电池组均固定于内部支架上,置于不锈钢壳体内部.图1 水下相机结构示意图F i g .1 S t r u c t u r e o f t h e u n d e r w a t e r c a m e r a s ys t e m 1.2 定时等时间间隔自动拍摄 浅海地形演化的长期数据记录要求水下相机系统能定时等时间间隔自动拍摄,主控模块电路原理图如图2所示.系统每30m i n 自动获取一张地形数据,主控部件信号时序如下:①接通电源;②开启外置光源供电;③5s 后,启动相机模块开机信号,信号持续2s;④2s 后,给出调焦信号,信号持续2s ;⑤2s 后,给出拍摄信号,信号持续2s ;⑥5s 后,给出关机信号,信号持续3s ;0.5h 后重复上述①-⑥过程.图2 主控模块电路原理图F i g .2 T h ec i r c u i t p r i n c i p l ed i a g r a mo f t h em a i nc o n t r o l m o d u l e1.3 续航能力 地形演化观测单个航次的照片数量通常为500~1000张,本系统配备12V /12A h 锂电池组,4G B 容量S D 存储卡,每30m i n 自动拍摄一张照片的频率下,可以确保10天连续拍摄所需的电量和数据存储空间.1.4 水密性及防腐蚀性能 本系统裸露材料均采用304(18/8)不锈钢外壳,外壳材料厚达1mm ,顶盖厚度为1c m ,顶盖和壳体之间使用螺栓连接,并配有加强防水O 圈.该设计确保系统在200m 水深以浅区域的水密性及防腐蚀性,最长观测时间为一个月.1.5 仪器安装 本系统可安装于各种类型和规格的三脚架及平行支架上(图3),安装高度根据观测地点的地形㊁水动力条件及所需获取地形的面积决定.㊃226㊃第5期黄 蓓等:水下相机在微地貌动态过程研究中的应用图3 仪器安装F i g.3 I n s t r u m e n t i n s t a l l a t i o n 2 微地貌动态过程观测结果2.1 实验区概况 台湾海峡是南海和东海物质和能量交换的主要通道,台湾海峡南部有一片水深较浅的区域,平均水深约为20m ,称为台湾浅滩.台湾浅滩位于福建省东南沿海的东山岛外,向东延伸至澎湖列岛,其底质组成主要为中粗砂.该区域水动力环境复杂,具有特殊的海底地形地貌.遥感图像的分析表明,该区域在潮流作用下形成了潮流脊和海底沙丘,海底沙丘叠加在潮流脊之上,沙丘波高为3~25m ,波长为300~1100m [6~10].2.2 观测结果 图4所示为2012年6月24至25日,台湾浅滩沙丘波峰处的微地貌动态过程部分记录.水下相机安装在三脚架上,三脚架置于北纬22ʎ57.488',东经118ʎ2.338',测量站位水深25m ,水下相机顶盖及玻璃取景器距离海底0.50m.图4第一行从左至右,依次列出从6月24日12:50开始到14:50每隔0.5h拍摄得到的图片,第二行是15:20到17:20之间获取的图像.可以看到,伴随着观测站位的水流作用,海底微地貌形态从接近平床,逐渐演变成凹凸不平形态;接着,床面物质的运动又使得波痕被慢慢削平,最后又重新回复到平床状态.图4下半部分,给出了24h 之后同一地点同一时间段,即6月25日12:50开始到17:20期间的海底波纹演化图像.可以看出,海底的床面物质以推移质的方式运动,原先的单曲线波痕慢慢从图片的右下角移动到左上角,继而又有新的波痕出现,形成双平行曲线波痕,随着水流的作用,波痕又慢慢变浅.图5所示为2012年6月29至30日台湾浅滩沙丘波谷处的部分海底微地貌图像,野外观测站点位于台湾浅滩北纬22ʎ57.763ᶄ㊁东经118ʎ2.320ᶄ.测量站位水深35m ,水下相机玻璃取景器距离海底0.45m.图5上半部分,记录了从6月29日18:10开始到22:40之间获取的底形图像.海底波纹成斜 川 字形,由于近底部上覆水层的动力学作用, 川字形波痕越发显著,波纹形态逐渐复杂;接着,伴随着底部沉积物的输运过程, 川 字形微地貌又慢慢消失,直至最后转为平床.图5下半部分是12h 以后,从6月30日6:10开始到10:40期间,同一地点的床面形态演变情况.海底波纹成枝杈型,波痕从微弱到明显,形态从简单到复杂,在上覆水层的作用下,波痕的脊部又慢慢被抚平,形成 平顶波痕 ,最终波痕逐渐消失,归为平床.㊃326㊃南京大学学报(自然科学)第50卷图4 台湾浅滩沙丘波峰处的微地貌动态记录(位于118ʎ2.338'E ,22ʎ57.488'N ;2012年06月观测)F i g .4 M i c r o -g e o m o r p h o l o g i c d yn a m i c r e c o r d s a t t h e p e a ko f t h eT a i w a nS h o a l s u b m a r i n e d u n e s (118ʎ2.338'E ,22ʎ57.488'N ;o b s e r v e d i nJ u n e 2012)图5 台湾浅滩沙丘波谷处的微地貌动态记录(位于118ʎ2.320ᶄE ;22ʎ57.763ᶄN ;2012年06月观测)F i g .5 M i c r o g e o m o r p h o l o g i c d y n a m i c r e c o r d s a t t h e t r o u g ho f t h eT a i w a n s h o a l d u n e s (118ʎ2.320ᶄE ;22ʎ57.763ᶄN ;o b s e r v e d i nJ u n e 2012)㊃426㊃第5期黄蓓等:水下相机在微地貌动态过程研究中的应用3讨论本文描述的水下相机系统,通过主控部件支持定时等时间间隔自动拍摄;续航时间长,满电情况下持续10天连续拍摄;水深200m以浅海域的高防水性能;防腐蚀性好.野外观测结果表明,该系统很好的完成长时间序列海底地形演化记录,为沉积动力学的研究提供了有效的数据支持.但是,该系统还存在一些不足之处,有待进一步改进.首先,只能定性地记录微地貌的形态变化,还不能定量给出波纹波长和波高的精确数值.其次,水下相机所拍摄的视域范围与其取景器距离海底的距离有关,改进的方法是采用调整焦距的方法保持固定的视域范围.第三,本文研制的水下相机采用内置闪光灯,闪光灯位置固定,光照方向与镜头方向平行.由此产生的问题是当海水中产生大量气泡时,会产生强烈的光线反射,系统无法有效获取地形图像.解决方法是采用外置光源,光照方向可自由调节,与摄像头方向呈45ʎ~90ʎ范围,最大程度的减少水中气泡产生的反射,以确保浅海地形演化数据的正常记录.本文自制的水下相机,可以完整记录长时间序列的海底微地貌动态过程,有助于进一步深入了解在一定物源供应和水动力条件下的海床沉积和侵蚀变化过程及其规律,进而判断海底稳定性,为海底信息的提取㊁海洋工程建设㊁岸滩保护等提供有力支持,为今后中国近海调查的大型综合研究积累经验.致谢南京大学海岸与海岛开发教育部重点实验室人员在现场观测中提供了帮助,审稿专家对本文提出了建设性的修改建议,钱晶完成了图1的绘制,谨此致谢!R e f e r e n c e s[1]高抒.海洋沉积动力学研究导引.南京:南京大学出版社,2013,4~5.[2]高抒.极浅水边界层的沉积环境效应.沉积学报,2010,28(5):926~932.[3]高抒,贾建军.海底边界层水流结构及底移质搬运研究进展.海洋地质与第四纪地质,2000,20(3):101~106.[4]汪亚平,高建华,潘少明.长江河口区边界层参数的观测与分析.海洋地质,2006,22(7):16~20.[5]高抒.潮滩沉积记录正演模拟初探.第四纪研究.2007,27(5):750~755.[6]杜晓琴,李炎,高抒.台湾浅滩大型沙波㊁潮流结构和推移质输运特征.海洋学报,2008,30(5):124~136.[7]吴未华,李炎,邵浩等.D G P S走航测深验潮技术中的潮位信息提取方法.海洋学研究,2008, 26(3):98~105.[8]廉耀康,李炎.台湾浅滩沉积物粒度特征及输运趋势.台湾海峡,2011,30(1):122~127. [9]肖晖,郭小钢,吴日升.台湾海峡水文特征研究概述.台湾海峡,2002,21(1):126~138. [10]郑铁民,张君元.台湾浅滩及其附近大陆架的地形和沉积特征的初步研究.黄东海地质,北京:科学出版社,1982,52~66.㊃526㊃。
一种基于高斯混合模型的海上浮标轨迹聚类算法

一种基于高斯混合模型的海上浮标轨迹聚类算法荆晓刚;葛丽阁;孙伟【摘要】海上环境不同于陆地,其不受道路、轨道的限制和受表面风流场多因素影响,其目标的运动轨迹更显杂乱,给海上目标的轨迹分析带来挑战.提出一种基于高斯混合模型的海上浮标轨迹的聚类算法.该算法将高斯混合模型应用于漂移浮标的复杂不规则轨迹的聚类,能够有效消除轨迹中异常点的影响.仿真实验表明针对浮标漂移轨迹GMM算法较K-means算法更优,鲁棒性更好.该研究成果可应用于海上搜救、航路规划等领域.【期刊名称】《现代计算机(专业版)》【年(卷),期】2017(000)036【总页数】4页(P3-5,8)【关键词】聚类;高斯混合模型;浮标;漂移轨迹【作者】荆晓刚;葛丽阁;孙伟【作者单位】上海港引航站,上海 200082;上海海事大学信息工程学院,上海201306;上海海事大学信息工程学院,上海 201306【正文语种】中文0 引言随着计算机技术的不断发展和移动对象跟踪技术的不断完善,人们采集到大量的运动目标轨迹数据,为了找出这些数据中隐藏的知识,移动对象轨迹聚类技术应运而生。
目前,在轨迹聚类方面的研究,主要有朱燕[1]等基于聚类的出租车异常轨迹检测,通过将单条轨迹划分为若干子段,再计算各轨迹间的相似度,基于距离和密度的聚类来实现出租车异常轨迹检测,但其算法时间代价较高;石陆魁[2]等人提出了基于时空模式的轨迹数据聚类算法,但聚类算法效率较低;吴熙[3]等人提出的基于轨迹聚类的超市顾客运动追踪,对顾客部分遮挡、复杂运动轨迹以及异步运动等多种特殊情况具有较高的鲁棒性,但算法时间复杂度较高。
以上研究工作都是针对陆地上的运动目标。
海上目标的运动轨迹与陆地不同,其不受道路、轨道的限制,并且海上目标受力复杂,其轨迹点随机性更强,轨迹也更加复杂不规则。
本文针对海上目标轨迹的特征,提出一种基于高斯混合模型的浮漂轨迹聚类算法。
海上目标轨迹分析的研究工作,可以使人们更好地掌握和预测海上航行轨迹,并应用于海上搜救、航路规划等领域。
基于图像识别的无标尺水位测量技术研究

第 4 期水 利 水 运 工 程 学 报No. 4 2023 年 8 月HYDRO-SCIENCE AND ENGINEERING Aug. 2023 DOI:10.12170/20220308002孙英豪,丁勇,李登华,等. 基于图像识别的无标尺水位测量技术研究[J]. 水利水运工程学报,2023(4):91-97. (SUN Yinghao, DING Yong, LI Denghua, et al. Research on measuring technique of water level without scale based on image recognition[J]. Hydro-Science and Engineering, 2023(4): 91-97. (in Chinese))基于图像识别的无标尺水位测量技术研究孙英豪1,丁勇1,李登华2,谢东辉3(1. 南京理工大学理学院,江苏南京 210094; 2. 南京水利科学研究院水利部土石坝破坏机理与防控技术重点试验室,江苏南京 210029; 3. 宁波原水集团有限公司皎口水库分公司,浙江宁波 315000)摘要: 针对传统人工读取水位标尺效率低和现有基于水位标尺进行图像处理获取水位的环境适应性差、水位标尺量程短等问题,提出一种基于图像识别的无标尺水位测量技术。
该技术无需借助水位标尺,仅需对水位进行标定;将采集到的水位图像输入U-net神经网络进行训练,得到水体区域和非水体区域的图像语义分割模型;借助图像识别获取水位线坐标;最后根据水位标定的数学模型,采用线性插值和坐标拟合的方法计算水位。
试验结果表明,该技术环境适应性强,昼、夜间的水位测量误差均小于1 cm。
采用该技术可以实现河道、水库等大量程的水位实时测量。
关 键 词:水位测量;图像识别;神经网络;语义分割中图分类号:TV123 文献标志码:A 文章编号:1009-640X(2023)04-0091-07水位是水文观测的重要数据,实时获取水位数据对防洪防汛和保护人民生命财产安全有重大意义。
水中目标动态爆点纯方位定位技术

工业技术科技创新导报 Science and Technology Innovation Herald118在鱼雷作战效能试验、爆炸毁伤试验和部队实雷攻靶训练中,鱼雷攻击水中目标时的实航动态爆点定位数据是作战效能、攻击效果、毁伤能力评估的重要依据[1-3]。
国内目前采用在被攻击目标上布设测点,应用双曲线定位的原理动态爆点进行测量[4]。
该测量方法存在成本大、难度高、精度低、有时无法在被攻击目标上布设测点等问题。
而使用矢量传感器技术[5-6],利用纯方位定位原理对动态爆点进行精确定位,可有效解决传统测量手段中遇到的问题。
1 传统水下动态爆点定位技术局限性分析对鱼雷等水中兵器实航动态爆点的测量,传统的测量手段是在目标上加装传感器,测量爆炸压力到达各传感器的时延差,用双曲线定位的原理解算爆点位置。
这种方法存在下列问题。
一是爆点是动态的,预先无法确定其位置,因而无法确定迎爆面,传感器加装必须全范围覆盖目标,加大了测量成本和操作难度。
二是无法预先确定爆点位置,各测量传感器的量程及各通道动态范围无法确定,需要冗余配置,同样加大测量成本和操作难度。
三是如果爆点和测点距离较近(小于10倍药包半径),冲击波压力传播速度与传播距离的非线性因素造成冲击波压力平均传播速度无法精确估计,使得双曲定位测量精度无法得到保证。
四是在建立测量坐标系过程中,由于各测点传感器为贴片式,布置于被攻击目标外表面,测点空间坐标随壳体变化,难于精确测定,微小的测点空间坐标测量误差(尤其在爆点离测点距离较近的情况下)会造成爆点测量精度大幅下降。
五是存在因被攻击目标结构的原因(如实雷攻击训靶),无法在被攻击目标上安装测点,因而无法使用该传统手段对动态爆点进行定位。
2 水中动态爆点纯方位定位原理仅考虑平面定位问题。
定义基线坐标系为:以阵元i 为坐标原点,阵元i 和阵元j 构成的基线为x 轴,x 轴的正方向为由阵元i 指向阵元j ,该坐标系称为基线坐标系@噗 噗>LM LM \[, ML =,M L ≠ ,如图1所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
J OUR NA LO F NAN J I NG UN I V E R S I T Y ( ) NATUR A LS C I E N C E S
南京大学学报 ( 自然科学 )
V o l . 5 1, S u l e m e n t p p , N o v . 2 0 1 5
, l o c a t i o n . B a s e do nt h et i m ed i f f e r e n c eo fa r r i v a l t h el o c a t i o no ft h ei m a c tp o i n t sw a sc a l c u l a t e db i rm e a s u r e d p ya r e s u l t sa n du n d e r w a t e rm e a s u r e dr e s u l t s . I no u rs i m u l a t i o nr e s e a r c h, w et o o kac e r t a i ni m a c tp o i n t . T h el o c a t i n p g e r r o ro fo u rn e wm e t h o d i ss m a l l e r t h a nt h a to f t h en o wg e n e r a l l s e dm e t h o d . yu : , , K e o r d s i m a c tp o i n t l o c a t i o n t i m ed i f f e r e n c eo f a r r i v a l a c o u s t i cp a s s i v e l o c a t i o n p yw
龙, 孙迪峰
S t u d nt h em e t h o df o rw a t e r s u r f a c e i m a c tp o i n t s yo p l o c a t i n a s e do nm u l t i l e s e n s o r s gb p
* , , , , , C a iZ o n i X uX u e z h o n L i a n u b i n Z h a oT i a n i n C h e n o n S u nD i f e n g y g gX q g gL g g
m e t h o d, t h er e s u l to f t i m ed i f f e r e n c eo f a r r i v a l a i n e d f r o mt w os e n s o r s i s c o n s i d e r e da s t h ep a r a m e t e r so f t h e t a r e t g g
: / D O I 1 0. 1 3 2 3 2 . c n k i . n u . 2 0 1 5. 0 7. 0 0 6 j j j
一种水上落点定位方法研究
蔡宗义 * , 许学忠 , 梁旭斌 , 赵天青 , 成
( ) 西北核技术研究所 , 西安 , 7 1 0 0 2 4 摘 于到时测量的多传感器水上落点空气声和水声联合 被 动 定 位 方 法 , 并 对 定 位 误 差 进 行 了 分 析 和 数 值 仿 真. 该方法 从传感器测得的目标落水信号到时得出目标落点位置测量方程 , 根据空气声和水声 多 个 传 感 器 得 到 的 目 标 落 水 到 时数据计算目标落点在水面的准确位置 . 研究结果表明 , 该落点定位方法是可行 的 , 空气声和水声联合定位提高了 定位精度 , 有一定的实用价值 , 可直接用于地面落点目标的定位 . 关键词 : 落点定位 , 到达时间差 , 声测被动定位 中图分类号 : T N 9 1 1. 7 2 文献标识码 : A 要: 在兵器试验中 , 确定实验靶弹的落点是一项 非 常 重 要 的 工 作 . 提 出 一 种 水 上 靶 弹 落 点 定 位 技 术, 研究了基
( , , ) N o r t h w e s t I n s t i t u t eo fN u c l e a rT e c h n o l o X i a n 7 1 0 0 2 4, C h i n a a t i s f a c t o r . W ep r o o s ean e wm e t h o do fb o m bi m a c tp o i n t s l o c a t i n i t hm a n e n s o r sd i s t r i b u t e do n y p p gw ys , w a t e r s u r f a c ea n du n d e r w a t e r w h i c hi sb a s e do nt h et i m ed i f f e r e n c eo fa r r i v a lo fa c o u s t i cs i n a l . T h r o u ht h en e w g g
: , , A b s t r a c t T h en o wg e n e r a l l s e dm e t h o d f o r l o c a t i n t h eb o m b i m a c t o i n t so nw a t e r s u r f a c e i s i no u r o i n i o n s t i l l yu g p p p
收稿日期 : 2 0 1 5-0 6-3 0
: * 通讯联系人 , E m a i l c a i z o n i @n i n t . a c . c n g y
㊃2 8㊃
南京大学学报 ( 自然科学 )
第5 1卷
用, 如战场目标声学探测系统 ㊁ 反直升机武器系 近年来 , 在美国国 . 防部 关 键 技 术 计 划 中 , 声探测与定位技术一直 统和智能地雷引信系统等 是重点研究内容之一 .