西北工业大学自动控制原理模拟题与答案胡祝兵
西北工业大学自动控制理论模拟卷四(含答案)

图解 1 根Biblioteka 迹图根据 计算,可绘制出系统根轨迹如图所示 由根轨迹图解 1(a)可 看出,当 0 ≤ a ≤ 0.4147 时,多项式的根全 实数
当 a < 0 时,需绘制 0o 根轨迹 实轴 的根轨迹区段 (− ∞,−3],[− 2,−1],
[0, ∞)
由根轨迹图图解 1(b)可 看出,当 a < 0 时,多项式的根全 实数 因 所求参 数 a 的范围 0 ≤ a ≤ 0.4147 或 a < 0
6
3.
已知系统开环传递函数
G(s)
=
10(s 2 − 2s (s + 2)(s −
+ 5) 0.5)
试概略绘制幅相特性曲线,并根
据奈氏判据判定闭环系统的稳定性
4. 设单
反馈系统的开环传递函数
G(s)
=
s(s
K + 1)(0.25s
+ 1)
,要求校
后系统
的静态速度误差系数Kv≥5(rad/s),相角裕度 γ≥45°,试设计串联迟后校 装置
Gc (s)
=
s ωD
s ω
E
+1 +1
=
s +1 0.06
s +1 0.0072
5( s + 1)
校 后系统开环传递函数
Gc (s) ⋅ G(s)
=
s(s
0.06 + 1)( s +1)(
s
+ 1)
4 0.0072
5
验算
图解 3
γ
′
=
180°
+
∠Gc
(
jω
′
《自动控制原理》西北工业大学参考题整理
《自动控制原理》西北工业大学参考题整理西北工业大学《自动控制原理》参考习题1-3、1-4;2-1(c)&(d)、2-6、2-8、2-10、2-11、2-12、2-133-1、3-3、3-4、3-6、3-7、3-9、3-11、3-13、3-15、3-16、3-17、3-21、3-22、3-23、3-24、3-28(1)、3-38、3-394-2、4-3(1)&(3)5-1、5-2(1)、5-3、5-6、5-9(1)&(2)&(3)、5-11(1)、5-13(1)~(4)6-2、6-3、6-4、6-5(1)、6-6、6-7、6-8、6-10(1)、6-12、6-13、6-16第一章习题及答案1-3、1-41-3 题1-3图为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
题1-3图 炉温自动控制系统原理图解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置所控制,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压f u 。
f u 作为系统的反馈电压与给定电压r u 进行比较,得出偏差电压e u ,经电压放大器、功率放大器放大成a u 后,作为控制电动机的电枢电压。
在正常情况下,炉温等于某个期望值T °C ,热电偶的输出电压f u 正好等于给定电压r u 。
此时,0=-=f r e u u u ,故01==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。
这时,炉子散失的热量正好等于从加热器吸取的热量,形成稳定的热平衡状态,温度保持恒定。
当炉膛温度T °C 由于某种原因突然下降(例如炉门打开造成的热量流失),则出现以下的控制过程:控制的结果是使炉膛温度回升,直至T °C 的实际值等于期望值为止。
(NEW)西北工业大学《821自动控制原理》历年考研真题汇编(含部分答案)
目 录
2014年西北工业大学821自动控制原理考研试题(回忆版)
2013年西北工业大学821自动控制原理考研试题(回忆版)
2012年西北工业大学821自动控制原理考研试题(回忆版)
2011年西北工业大学821自动控制原理(B)考研真题
2010年西北工业大学821自动控制原理(A)考研真题
2009年西北工业大学821自动控制原理(B)考研真题
2008年西北工业大学427自动控制原理(A)考研真题
2007年西北工业大学427自动控制原理(A)考研真题
2006年西北工业大学427自动控制原理(A)考研真题(含答案)
2005年西北工业大学427自动控制原理(B)考研真题(含答案)
2004年西北工业大学427自动控制原理(A)考研真题(含答案)
2003年西北工业大学427自动控制原理考研真题(含答案)
2002年西北工业大学541自动控制原理考研真题(含答案)
2001年西北工业大学自动控制原理考研真题(含答案)。
西北工业大学自动控制原理考试试题汇总

装订线注:2. 命题教师和审题教师姓名应在试卷存档时填写。
共4页 第1页学号:姓名:自动控制原理试题A (56学时)答案及评分标准一、答案:A C B B A D C D C B评分标准:每小题2分二、1、答案:()12314()12314123141C S R S G G G G G G G G G G H G G H G +++--=评分标准:15分(按步骤给分)2、答案:%16.3 1.4s σ=s =% t 评分标准:10分,每一问5分3、答案:(1)*13K ω=-==12a d = d 3K (2) 13<<15评分标准:15分 第一问10分,第二问5分4、答案:(1) (2) K=80K <<评分标准: 15分 第一问8分,第二问7分 5、答案:(1) ()(1)(11020K G s s ss ++=)033.4γ=- K=100(2) 3.1251()1001c s G s s ++=(3) 0100(3.1251)()(1)(1)(10011020'57.7c s GG s s s s s γ+⎧⎪⎪+++⎨⎪=⎪⎩=) 评分标准:25分 第一问10分,第二问5分,第三问10分装订线注:2. 命题教师和审题教师姓名应在试卷存档时填写。
共4页 第1页学号:姓名:自动控制原理试题B (56学时)答案及评分标准一、 答案:C D B A B C A D C B评分标准:每小题2分二、1、答案:%16.3 1.4s σ=s =% t评分标准:10分,每一问5分2、答案:(1)*13K ω=-==12a d = d 3K (2) 13<<评分标准:15分 第一问10分,第二问5分 3、答案:()12314()12314123141C S R S G G G G G G G G G G H G G H G +++--=评分标准:15分(按步骤给分) 4、答案: (1) ()(1)(11020K G s s s s )++= K=10033.4γ=-(2) 3.12511001c S G S ++=(3) 0100(3.1251)()(1)(1)(1001)1020'57.7c s GG s s s s s γ+⎧⎪⎪+++⎨⎪=⎪⎩=评分标准:25分 第一问10分,第二问5分,第三问10分5、 答案:(1) (2) K=80K <<15评分标准: 15分 第一问8分,第二问7分诚信保证本人知晓我校考场规则和违纪处分条例的有关规定,保证遵守考场规则,诚实做人。
自动控制原理模拟题与答案

自动控制原理模拟题与答案一、选择题1. 在经典控制中,开环控制与闭环控制相比,下列说法正确的是:A. 开环控制具有较好的鲁棒性B. 闭环控制对扰动具有较好的抑制能力C. 开环控制是一种无延迟控制方式D. 闭环控制可以忽略系统的非线性和时变性答案:B2. 对于一个一阶惯性环节,其传递函数为G(s) = K / (Ts + 1),下列哪个参数可以影响系统的响应速度?A. KB. TC. TsD. 1答案:B3. PID控制器的传递函数为Gc(s) = Kp + Ki/s + Kds,其中Kp、Ki、Kd分别表示比例、积分和微分增益。
下列说法正确的是:A. 比例增益Kp决定超调量B. 积分增益Ki可以消除稳态误差C. 微分增益Kd可以提高系统的响应速度D. PID控制器只适用于线性系统答案:A二、填空题1. 在控制系统中,传递函数的分子部分表示_______,分母部分表示_______。
答案:输出;输入2. 智能调节器是一种_______控制器,通过模糊化处理将非精确的输入转化为精确的输出。
答案:模糊3. 传感器是自动控制系统中的_______,用于将物理量转化为电信号。
答案:输入装置三、计算题1. 一个系统的开环传递函数为G(s) = K / (s + 1),计算该系统的单位阶跃响应的时间常数T和最终值稳定误差Ku。
答案:时间常数T = 1秒最终值稳定误差Ku = 12. 一个系统的传递函数为G(s) = 10 / (s + 5)(s + 10),使用PID控制器进行控制,已知Kp = 1,Ki = 0.5,Kd = 0.2。
计算该系统的闭环传递函数。
答案:闭环传递函数为Gc(s) = (Kp + Ki/s + Kds)G(s)= (1 + 0.5/s + 0.2s) * (10 / (s + 5)(s + 10))四、简答题1. 什么是系统的稳态误差?如何消除系统的稳态误差?答:稳态误差是指系统在输入信号恒定时,输出与期望值之间的偏差。
《自动控制原理》(卢京潮,西北工业大学)第一章习题及答案[1]
![《自动控制原理》(卢京潮,西北工业大学)第一章习题及答案[1]](https://img.taocdn.com/s3/m/4e1dbe0b763231126edb11d3.png)
一、 习 题 及 解 答第1章习题及解答1-1 根据图1-15所示的电动机速度控制系统工作原理图,完成:(1) 将a ,b 与c ,d 用线连接成负反馈状态;(2) 画出系统方框图。
解 (1)负反馈连接方式为:,d a ↔c b ↔;(2)系统方框图如图解1-1 所示。
1-2 图1-16是仓库大门自动控制系统原理示意图。
试说明系统自动控制大门开、闭的工作原理,并画出系统方框图。
图1-16 仓库大门自动开闭控制系统解 当合上开门开关时,电桥会测量出开门位置与大门实际位置间对应的偏差电压,偏差电压经放大器放大后,驱动伺服电动机带动绞盘转动,将大门向上提起。
与此同时,和大门连在一起的电刷也向上移动,直到桥式测量电路达到平衡,电动机停止转动,大门达到开启位置。
反之,当合上关门开关时,电动机带动绞盘使大门关闭,从而可以实现大门远距离开闭自动控制。
系统方框图如图解1-2所示。
1-3 图1-17为工业炉温自动控制系统的工作原理图。
分析系统的工作原理,指出被控对象、被控量和给定量,画出系统方框图。
图1-17 炉温自动控制系统原理图解 加热炉采用电加热方式运行,加热器所产生的热量与调压器电压c u 的平方成正比,c u 增高,炉温就上升,c u 的高低由调压器滑动触点的位置,该触点由可逆转的直流电动机驱动。
炉子的实际温度用热电偶测量,输出电压f u 。
f u 作为系统的反馈电压与给定电压r u 进行比较,得出所控制偏差电压,经电压放大器、功率放大器放大成后,作为 况下,炉温等于某个期望值e u a u 控制电动机的电枢电压。
在正常情T °C ,热电偶的输出电压f u 正好等于给定电压r u 。
此时,0=−=f r e u u u 故01,==a u u ,可逆电动机不转动,调压器的滑动触点停留在某个合适的位置上,使c u 保持一定的数值。
这时,炉子散失量正好等于从加热器吸的热取的热量,形成稳定的热平衡状态,温度保持恒定。
西北工业大学自动控制原理模拟题与答案胡祝兵
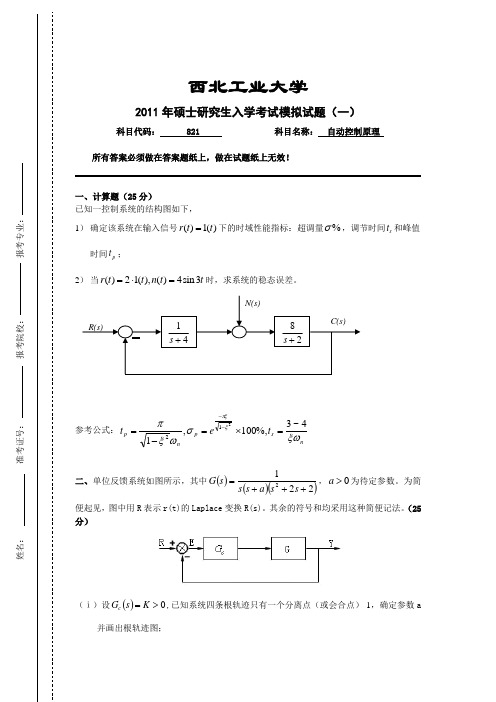
西北工业大学2011年硕士研究生入学考试模拟试题(一)科目代码: 821 科目名称: 自动控制原理所有答案必须做在答案题纸上,做在试题纸上无效!一、计算题(25分)已知一控制系统的结构图如下,1) 确定该系统在输入信号()1()r t t =下的时域性能指标:超调量%σ,调节时间s t 和峰值时间p t ;2) 当()21(),()4sin3r t t n t t =⋅=时,求系统的稳态误差。
参考公式:ns p np t et ξωσωξπξπξ4~3%,100,1212=⨯=-=--二、单位反馈系统如图所示,其中()()()2212+++=s s a s s s G ,0>a 为待定参数。
为简便起见,图中用R 表示r(t)的Laplace 变换R(s)。
其余的符号和均采用这种简便记法。
(25分)(ⅰ)设()0>=K s G c ,已知系统四条根轨迹只有一个分离点(或会合点)-1,确定参数a并画出根轨迹图;14s +82s +R(s)N(s)C(s)(ⅱ)确定根轨迹和虚轴的交点并由此确定使闭环系统稳定的K 值。
(ⅲ)确定系统输出无衰减振荡分量时的闭环传递函数。
三、已知最小相位系统的开环对数幅频特性渐近线如图所示,c ω位于两个交接频率的几何中心。
(25分)1) 计算系统对阶跃信号、斜坡信号和加速度信号的稳态精度。
计算超调量%σ和调节时间s t四、某火炮指挥系统结构如下图所示,()(0.21)(0.51)KG s s s s =++系统最大输出速度为2r/min ,输出位置的容许误差小于2,(25分)求:1) 确定满足上述指标的最小K 值,计算该K 值下的相位裕量和幅值裕量; 2) 前向通路中串联超前校正网络0.41()0.081c s G s s +=+,试计算相位裕量。
()G s ()R s ()E s ()C s五、已知系统的结构图如图所示。
(25分)(ⅰ)求出系统的闭环脉冲传递函数。
西北工业大学《自动控制原理》习题解答
《自动控制原理》习题解答西北工业大学自动化教研室第一章习题及答案1-3图1-3 (a),(b)所示均为调速系统。
(1) 分别画出图1-24(a)、图(b)所示系统的方框图。
给出图1-24(a) 所示系统正确的反馈连线方式。
(2) 指出在恒值输入条件下,图1-24(a),(b) 所示系统中哪个是有差系统,哪个是无差系统,说明其道理。
图1-3 调速系统工作原理图解图1-3 (a)正确的反馈连接方式如图1-3 (a)中虚线所示。
(1) 系统方框图如图解1-10所示。
(2) 图1-3 (a) 所示的系统是有差系统,图1-3 (b) 所示的系统是无差系统。
图1-3 (a)中,当给定恒值电压信号,系统运行达到稳态时,电动机转速的恒定是以发电机提供恒定电压为条件,对应发电机激磁绕组中电流一定是恒定值。
这意味着放大器前端电压是非零的常值。
因此,常值偏差电压存在是系统稳定工作的前提,故系统有差。
图1-3 (b)中,给定恒定电压,电动机达到稳定转速时,对应发电机激磁绕组中的励磁电流恒定,这意味着执行电动机处于停转状态,放大器前端电压必然为0,故系统无差。
1-4图1-4 (a),(b)所示的系统均为电压调节系统。
假设空载时两系统发电机端电压均为110V,试问带上负载后,图1-4(a),(b)中哪个能保持110V不变,哪个电压会低于110V?为什么?图1-4 电压调节系统工作原理图解带上负载后,开始由于负载的影响,图1-4(a)与(b)系统的端电压都要下降,但图(a)中所示系统能恢复到110V,而图(b) 所示系统却不能。
理由如下:图(a)系统,当u低于给定电压时,其偏差电压经放大器K放大后,驱动电机D转动,经I增大,发电机的输出电压会升高,从而使偏差电减速器带动电刷,使发电机F的激磁电流j压减小,直至偏差电压为零时,电机才停止转动。
因此,图(a)系统能保持110V不变。
图(b)系统,当u低于给定电压时,其偏差电压经放大器K后,直接使发电机激磁电流增大,提高发电机的端电压,使发电机G 的端电压回升,偏差电压减小,但不可能等于零,因i=0,发电机就不能工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西北工业大学2011年硕士研究生入学考试模拟试题(一)科目代码: 821 科目名称: 自动控制原理所有答案必须做在答案题纸上,做在试题纸上无效!一、计算题(25分)已知一控制系统的结构图如下,1) 确定该系统在输入信号()1()r t t =下的时域性能指标:超调量%σ,调节时间s t 和峰值时间p t ;2) 当()21(),()4sin3r t t n t t =⋅=时,求系统的稳态误差。
参考公式:ns p np t et ξωσωξπξπξ4~3%,100,1212=⨯=-=--二、单位反馈系统如图所示,其中()()()2212+++=s s a s s s G ,0>a 为待定参数。
为简便起见,图中用R 表示r(t)的Laplace 变换R(s)。
其余的符号和均采用这种简便记法。
(25分)(ⅰ)设()0>=K s G c ,已知系统四条根轨迹只有一个分离点(或会合点)-1,确定参数a并画出根轨迹图;14s +82s +R(s)N(s)C(s)(ⅱ)确定根轨迹和虚轴的交点并由此确定使闭环系统稳定的K 值。
(ⅲ)确定系统输出无衰减振荡分量时的闭环传递函数。
三、已知最小相位系统的开环对数幅频特性渐近线如图所示,c ω位于两个交接频率的几何中心。
(25分)1) 计算系统对阶跃信号、斜坡信号和加速度信号的稳态精度。
计算超调量%σ和调节时间s t四、某火炮指挥系统结构如下图所示,()(0.21)(0.51)KG s s s s =++系统最大输出速度为2r/min ,输出位置的容许误差小于2,(25分)求:1) 确定满足上述指标的最小K 值,计算该K 值下的相位裕量和幅值裕量; 2) 前向通路中串联超前校正网络0.41()0.081c s G s s +=+,试计算相位裕量。
()G s ()R s ()E s ()C s五、已知系统的结构图如图所示。
(25分)(ⅰ)求出系统的闭环脉冲传递函数。
L (ω)/dω (rad/s)-40-20-40150 -2020ωc(ⅱ)设图6中()s e s G Ts --=11,()12+=s K s G ,()Ks s H 1+=,试确定系统稳定时K 的取值范围。
已知:⎭⎬⎫⎩⎨⎧Z s 1=1-z z , ⎭⎬⎫⎩⎨⎧+Z αs 1=T e z z α--, ⎭⎬⎫⎩⎨⎧Z 21s =()21-z Tz 。
六、非线性系统(25分)已知非线性控制系统如图7所示,其中非线性环节的描述函数为:()214⎪⎭⎫ ⎝⎛-=X a X b X N π,()()()13,18.0121+=+=s s s G s s G 。
为使系统不产生自激振荡,试用描述函数法确定继电特性参数b a 和的关系。
西北工业大学2011年硕士研究生入学考试模拟试题(二)科目代码: 821 科目名称: 自动控制原理所有答案必须做在答案题纸上,做在试题纸上无效!一、已知一控制系统的结构图如下(25分)1) 确定该系统在输入信号()1()r t t =下的时域性能指标:超调量%σ,调节时间s t 和峰值时间p t ;2) 当()21(),()4sin3r t t n t t =⋅=时,求系统的稳态误差。
二、已知单位负反馈系统的根轨迹图如图所示。
(25分) 试:(ⅰ)确定系统开环根轨迹增益的范围r K ,使系统稳定; (ⅱ)写出系统临界阻尼时的闭环传递函数。
三、控制系统的结构图如图(a )所示,其中()s G 1的频率特性如图(b)(0,0>>τT )(25分)14s + 82s + R(s) N(s)C(s)Figure (a ):控制系统结构图Figure (b ):()s G 1的频率特性(ⅰ)写出()s G 1的表达式; (ⅱ)设()221ss G =,求出系统的开环传递函数; (ⅲ)画出系统的幅相频率特性曲线,并用Nyquist 稳定判据分析其稳定性。
四、单位负反馈系统的开环传递函数为)121)(161()(++=s s s Kv s G 要求做出该系统的对数幅频特性渐近曲线,并设计校正装置,使系统满足下列性能指标:(25分)(1)在最大指令速度为180 度/秒,位置迟后误差不超过1 度; (2)相角裕度为45 度; (3)幅值裕度不低于10dB ;(4)过度过程调节时间不超过3s 。
五、考虑如图所示的离散时间控制系统,()z D 为数字控制器。
采样周期s T 1=,()1-=z zz D (25分)Figure5:采样控制系统(ⅰ)确定使系统稳定的K 的值;(ⅱ)当K=1及()t t r =时系统的稳态误差;六、系统的方框图如图6所示,其中︒==∆==451,11θ,,h M ,所有的非线性特性均关于原点中心对称,()21s Ts s G +=。
(25分) (ⅰ)画出负倒特性曲线和线性部分()s G 的Nyquist 图,(ⅱ)分析当5.0=T 时,系统是否存在自激振荡,如果存在自激振荡,请计算输出端的振幅和频率。
(ⅲ)讨论参数T 的变化对系统自激振荡的影响。
图中死区、饱和特性和继电特性等非线性环节的描述函数分别为:()⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛∆-∆-∆-=211arcsin 22X X X K X N ππ,∆≥X ()⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛∆-∆+∆=221arcsin 2X X X K X N π,∆≥X ()223414X Mh j X h X M X N ππ-⎪⎭⎫⎝⎛-=,h X ≥Figure6:非线性控制系统西北工业大学2011年硕士研究生入学考试模拟试题(三)科目代码: 821 科目名称: 自动控制原理所有答案必须做在答案题纸上,做在试题纸上无效!一、稳定性分析(25分)1) 已知系统的方块图如下,求使系统稳定的K 。
2) 设单位反馈系统的开环传递函数为)107.01)(33.01()(s s s Ks W k ++=,要求闭环特征根的实部均小于-1,求K 值应取的范围。
二、已知单位负反馈控制系统的开环传递函数为()()()428.00++=s s s G ,采用串联校正装置的形式为()⎪⎭⎫⎝⎛+=s K s G c c 185,如图2所示。
为简便起见,图中用R 表示r(t)的Laplace 变换R(s)。
其余的符号和均采用这种简便记法。
(25分)Figure2:单位反馈系统试:(ⅰ)绘制系统的根轨迹。
(ⅱ)当系统的阻尼比ζ为最佳阻尼比时,求系统在单位阶跃函数作用下,系统的动态性能指标超调量%σ和调整时间s t 。
三、由实验测得某最小相位系统的幅频特性对数坐标图如图所示,试求:(25分) (ⅰ)系统的开环传递函数()s G 并画出系统的相频特性曲线; (ⅱ)计算系统的相角裕度γ和幅值裕度g K ;(ⅲ)闭环系统对单位阶跃输入和单位斜坡输入的稳态误差分别是多少?四、已知一系统,其中固有部分的传递函数)1007.0)(19.0(1)(++=s s s s G 若要求速度误差系数1Kv ≥1000 ,单位阶跃响应的过渡过程时间ts ≤ 0.25 s ,超调量σ%=30%,要求设计预期开环传递函数0G (s ) ,并求出校正装置的传递函数)(s G c 。
(25分)五、离散控制系统如图4所示,其中T>0为采样周期,K>0。
(25分)Figure4:离散控制系统(ⅰ)求系统的开环脉冲传递函数()z G 和闭环脉冲传递函数()z Φ; (ⅱ)当K=1时,求使系统稳定的T 值范围;(ⅲ)K=1,T=1s 时,求单位阶跃输入下的输出响应()kT y 和稳态误差()∞e 六、非线性控制系统如图5所示,图中非线性环节的描述函数为(25分)()1811822>-⎪⎭⎫⎝⎛-=X X jX X X N ππFigure5:非线性控制系统(ⅰ)设系统处于稳定自振状态时,线性环节()()12+=s s ks G 的相角迟后量为︒135,求此时的K 值,并确定输出端自振频率、幅值。
(ⅱ)定性分析当K 值增加时,系统输出端自振频率、幅值的变化趋势西北工业大学2011年硕士研究生入学考试模拟试题(一)科目代码: 821 科目名称: 自动控制原理(评分参考卷)所有答案必须做在答案题纸上,做在试题纸上无效!一、计算题(25分)1)系统的开环传递函数为:288()(4)(2)68G s s s s s ==++++系统的闭环传递函数为28()616G s s s =++(1分)比较 二阶系统的标准形式222()2nn nG s s s ωξωω=++,可得 4n ω=而26n ξω=,所以0.75ξ=1.795p t s ==(3分)100% 2.8%e ξπσ-=⨯=(3分)31(5%)s nt s ξω==∆=(3分)2)由题意知,该系统是个线性系统,满足叠加原理,故可以分别求取,()21()r t t =⋅和()4sin 3n t t =分别作用于系统时的稳态误差1ess 和2ess ,系统的稳态误差就等于12ess ess ess =+。
A ) ()21()r t t =⋅单独作用时,由系统的开环传递函数知,系统的开环增益1k K =,所以系统对()21()r t t =⋅的稳态误差1ess 为:11211kess K =⨯=+(4分)B ) ()4sin 3n t t =单独作用时,系统的方块图为系统的闭环传递函数为:28(4)()616e s W s s s +=++ 频率特性为:28(4)()616e j W j j ωωωω+=+-当系统作用为()4sin 3n t t =时,3ω=,所以28(34)3224(3) 2.0763163718e j jW j j j++===⨯+-+ 2418(3)arctanarctan -0.5564327e W j ∠=-= 系统的输出为:24(3)sin(3(3))8.56sin(30.5564)e e ess W j t W j t =⨯+∠=-(5分)所以系统的误差为:18.56sin(30.5564)ess t =+-(1分) 二、(25分)解:(ⅰ)由分离点的计算公式 0111111=+++-++++jd j d a d d依题意,得分离点1-=d ,代入上式得 a=2则开环传递函数()()()22220+++=s s s s Ks G ①开环极点01=p ,22-=p j p ±-=14,3 数目 n=4;系统有四条根轨迹;分别起始于开环极点,终止于无穷远点; ②实轴上根轨迹段为()02,-;③渐近线与实轴夹角为︒︒︒︒=31522513545,,,a ϕ;渐近线与实轴的交点1-=a σ; ④由已知,得分离点为-1;由以上计算得到的参数,得根轨迹如图1所示:图1(ⅱ)根轨迹与虚轴的交点由()010=+s G ,得特征方程为0464234=++++K s s s s劳斯阵:4s 1 6K3s 4 42s5K1s 5420K- 0sK要与虚轴有交点,则有一行全零,即50420=⇒=-K K 辅助方程:j s s ±=⇒=+2,12055综上,与虚轴的交点是j ±,使闭环系统稳定的K 值范围应是0<K<5。