基于Backstepping的高超声速飞行器模糊自适应控制_高道祥
基于模糊自适应的高超声速飞行器控制设计

基于模糊自适应的高超声速飞行器控制设计随着科技的不断发展,高超声速飞行器的研究成为了重要的领域之一。
高超声速飞行器是指在大气层高速飞行的飞行器,具有超过5马赫的飞行速度。
由于其在高速飞行过程中的特殊性质,这些飞行器的设计及控制变得更加复杂。
因此,在高超声速飞行器的控制系统设计中,模糊自适应的控制方法被广泛应用。
模糊自适应控制方法是在控制系统中应用模糊逻辑的基础上,通过不断调整模糊逻辑的规则和模糊量,从而达到控制器自适应调节的目的。
在高超声速飞行器的控制中,模糊自适应控制方法可以应用于飞行器的姿态控制、航向控制和位置控制等方面。
姿态控制是指在空中运行时,飞行器姿态的偏差对其运动轨迹和飞行稳定性的影响。
在高超声速飞行器中,由于其高速飞行的特性,姿态控制变得尤为重要。
在姿态控制中,可以采用模糊自适应控制方法来制定一个控制器,以减小姿态误差。
该控制器可以通过检测飞行器的旋转角速度、角度、角速度变化率以及加速度等参数进行自适应调控。
在航向控制中,需要控制飞行器沿始发地点和目的地之间的航线进行飞行。
在高超声速飞行器中,航向错位可能会导致飞行器进入高速不稳定的状态,进而造成事故。
采用模糊自适应控制方法可以对飞行器的航向进行自适应调节,使飞行器沿所需的航线飞行。
位置控制是指控制飞行器在飞行过程中的空间位置。
高超声速飞行器控制中的大部分任务都要求精确的位置控制,因此,模糊自适应控制方法可以应用于该控制任务。
在位置控制中,控制器需要鉴别当前飞行器的位置和速度,并控制适当的加速度以使飞行器沿着期望轨道飞行。
总之,基于模糊自适应的高超声速飞行器控制设计在实践中取得了良好的应用效果。
随着高超声速飞行器的广泛应用,该技术将成为必需的领域之一。
未来,我们可以预见,随着更为先进的高超声速飞行器的问世,基于模糊自适应的高超声速飞行器控制设计将持续发挥着重要的作用。
基于Backstepping模糊自适应的四旋翼飞行器控制
基于Backstepping模糊自适应的四旋翼飞行器控制张硕;张学典;秦敏;陈征【摘要】针对四旋翼飞行器轨迹跟踪模型中所受到的外界扰动和参数不确定性等问题,设计了基于模糊自适应反步法的控制策略.在姿态系统中,利用反步法设计控制器,对系统中不确定函数部分采用模糊逻辑系统进行在线逼近.对飞行器运动轨迹进行了跟踪仿真,取得了较为理想的控制效果,验证了该方法的可行性.【期刊名称】《电子科技》【年(卷),期】2017(030)002【总页数】4页(P54-57)【关键词】模糊控制;四旋翼飞行器;非线性系统;反步法【作者】张硕;张学典;秦敏;陈征【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093【正文语种】中文【中图分类】V249.1;TP273+.4针对四旋翼飞行控制的研究已有很多经典的控制方法,例如自适应鲁棒方法、反步法、滑模控制方法、人工智能方法、以及优化方法等。
反步法(Backstepping)又称反向递推控制。
这种方法的主要设计思想是将多维非线性系统分解成多个子系统,并在每个子系统中设计虚拟控制律和Lyapunov能量函数,一直反推到最后一个子系统并完成真正的控制律的设计,通过构造的能量函数来最终保证系统稳定性和动态性能。
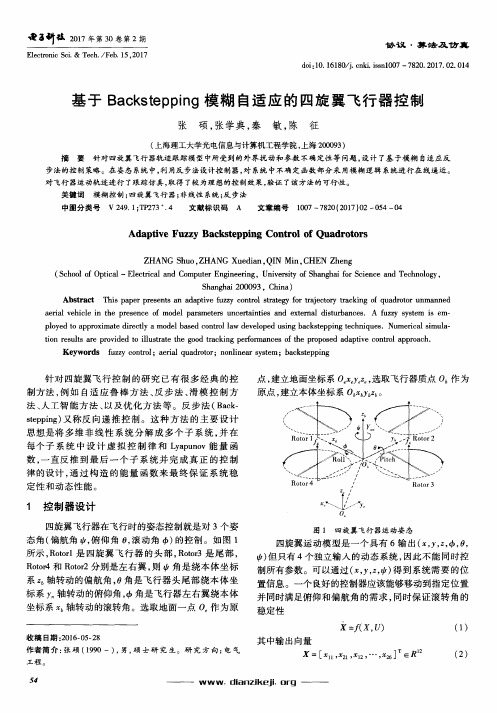
四旋翼飞行器在飞行时的姿态控制就是对3个姿态角(偏航角ψ,俯仰角θ,滚动角φ)的控制。
如图1所示,Rotor1是四旋翼飞行器的头部,Rotor3是尾部,Rotor4和Rotor2分别是左右翼,则ψ角是绕本体坐标系zb轴转动的偏航角,θ角是飞行器头尾部绕本体坐标系yn轴转动的俯仰角,φ角是飞行器左右翼绕本体坐标系xb轴转动的滚转角。
选取地面一点Oe作为原点,建立地面坐标系Oexeyeze,选取飞行器质点Ob作为原点,建立本体坐标系Obxbybzb。
基于跟踪微分器的高超声速飞行器Backstepping控制
基于跟踪微分器的高超声速飞行器Backstepping控制发布时间:2021-06-17T06:34:19.689Z 来源:《现代电信科技》2021年第1期作者:于智洋[导读] 虽然Backstepping方法已广泛应用于HFV控制器设计中,但其自身存在“微分项膨胀”问题,在控制器设计过程中必须予以解决。
(天津华翼蓝天科技股份有限公司天津 300384)摘要:虽然Backstepping方法已广泛应用于HFV控制器设计中,但其自身存在“微分项膨胀”问题,在控制器设计过程中必须予以解决。
本文提出一种基于Backstepping和跟踪微分器的HFV跟踪控制方法。
引入待跟踪状态与理想控制指令之间的实际误差作为反馈量。
利用跟踪微分器求取信号的一阶导数,提高了控制器对控制增益变化的适应性。
关键词:跟踪微分器;高超声速飞行器;Backstepping控制高超声速飞行器(Hypersonic flight vehicle,HFV)是指飞行马赫数大于5的一类飞行器。
其具有机动灵活、突防能力强、拦截难度大等特点,自其出现以来便受到各航空航天大国的高度重视。
目前,采用乘波体构型的吸气式高超声速飞行器受到更多的关注。
然而,这类高超声速飞行器模型具有高度非线性、强耦合、参数不确定等特点,且外部飞行环境恶劣,因此为其设计飞行控制系统非常具有挑战性。
很多学者基于Backstepping方法为HFV设计飞行器控制器,并取得了很好的效果。
1高超声速飞行器数学模型高超声速飞行器的纵向动力学模型如下:其中为升降舵偏转角与燃油当量比。
q与为动压与大气密度,S、c、Tz分别为参考面积、平均气动弦长和推力力矩耦合系数。
2非线性控制器设计控制器设计的重点和难点在于:(1)Backstepping方法设计过程需要求取虚拟控制量导数,而采用传统动态面方法实现较为简单,但对控制增益的变化适应性较差,从而影响控制精度;(2)控制器设计过程中需要对模型中的干扰项进行估计,而模型中的干扰项受多方面因素影响,难以通过一定的假设对其进行限制。
基于Backstepping模糊自适应的四旋翼飞行器控制
s t e p p i n g ) 又称反 向递 推控制 。这种 方法 的主要设计
思想是将多 维非线 性 系统分解 成多个 子 系统 , 并 在 每个子 系统 中设计 虚 拟 控制 律 和 L y a p u n o v能 量 函 数, 一 直 反 推 到 最 后 一 个 子 系 统 并 完 成 真 正 的 控 制
对 飞 行 器运 动 轨 迹 进 行 了跟 踪 仿 真 , 取 得 了较 为 理 想 的控 制 效 果 , 验 证 了该 方 法 的 可 行 性 。
关键词
模糊控 制 ; 四旋翼 飞行 器 ; 非线性 系统 ; 反步法 V 2 4 9 . 1 ; T P 2 7 3 . 4 文献标识码 A 文章编 号 1 0 0 7—7 8 2 0 ( 2 0 1 7 ) 0 2— 0 5 4— 0 4
基于 B a c k s te p p i n g模 糊 自适 应 的 四旋 翼 飞 行 器 控 制
张 硕, 张学典 , 秦
摘 要
敏, 陈 征
( 上海理工大学光 电信息 与计算机 工程学院 , 上海 2 0 0 0 9 3 ) 针对 四旋 翼飞行器轨迹跟踪模型 中所 受到 的外界扰动 和参数 不确 定性等 问题 , 设 计 了基 于模糊 自适 应反 步 法的控 制策略 。在姿 态 系统 中, 利 用反 步法设 计控 制器 , 对 系统 中不确 定函数部 分采 用模糊逻 辑 系统 进行在 线逼近 。
奄a 叶技 2 0 1 7 年 第 3 0 卷 第 2 期
E l e c t r o n i c S c i . &T e c h . /F e b . 1 5. 2 0 1 7
协 议
・算 法 及 仿 真
d o i : 1 0 . 1 6 1 8 0 / j . c n k i . i s s n l 0 0 7— 7 8 2 0 . 2 0 1 7 . 0 2 . 0 1 4
基于神经网络的高超声速飞行器自适应补偿控制方法[发明专利]
![基于神经网络的高超声速飞行器自适应补偿控制方法[发明专利]](https://img.taocdn.com/s3/m/a9d787edcc17552706220815.png)
专利名称:基于神经网络的高超声速飞行器自适应补偿控制方法
专利类型:发明专利
发明人:胡庆雷,李梓明,郭雷,王陈亮
申请号:CN201810262739.8
申请日:20180328
公开号:CN108375907A
公开日:
20180807
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于神经网络的高超声速飞行器自适应补偿控制方法,包括以下步骤:建立高超声速飞行器的纵向动力学模型,并将其分解为姿态子系统和速度子系统;建立高超声速飞行器的升降舵故障模型;构建平滑函数来估计非线性输入饱和,并引入径向基函数神经网络来估计高超声速飞行器的纵向动力学模型中的非线性函数;通过反步法设计高超声速飞行器的自适应补偿控制器及相应的自适应参数更新律。
本发明提供了一种考虑了升降舵故障以及输入饱和的径向基神经网络自适应补偿控制方法,解决了高超声速飞行器飞行过程中各类升降舵故障以及执行器饱和对飞行器的影响,保证了系统的容错能力和鲁棒性。
申请人:北京航空航天大学
地址:100191 北京市海淀区学院路37号
国籍:CN
更多信息请下载全文后查看。
基于滚动时域估计的高超声速飞行器轨迹跟踪

基于滚动时域估计的高超声速飞行器轨迹跟踪
臧红岩;王凯;高长生;荆武兴;王越欣
【期刊名称】《现代防御技术》
【年(卷),期】2024(52)2
【摘要】针对高超声速飞行器高精度轨迹跟踪问题,提出一种将滚动时域估计与交互式多模型算法相结合的强机动目标轨迹跟踪算法。
给出了半速度系下的高超声速飞行器滑翔段运动模型及量测模型。
利用滚动时域估计方法将状态估计问题转化为有约束的优化问题,并充分考虑飞行器滑翔段物理约束。
在此基础上,为应对目标不同机动模式,借助交互式多模型算法思想建立模型集对其进行近似。
分别在机动模式不变和机动模式突变的情况下对算法进行了验证。
结果表明,新算法采用多个模型并行估计,即时调整模型概率后进行融合输出,能够有效避免目标跟踪模型失配,可显著提高对于高超声速飞行器这类强机动目标的轨迹跟踪精度。
【总页数】13页(P132-144)
【作者】臧红岩;王凯;高长生;荆武兴;王越欣
【作者单位】哈尔滨工业大学航天学院
【正文语种】中文
【中图分类】TJ765
【相关文献】
1.基于LADRC的RBCC高超声速飞行器轨迹跟踪
2.基于气动性能分析的高超声速滑翔飞行器轨迹估计
3.基于高斯伪谱法的高超声速飞行器轨迹优化与跟踪控制
4.
基于MPC的带动力高超声速飞行器轨迹跟踪5.一种弹性高超声速飞行器的轨迹跟踪控制算法
因版权原因,仅展示原文概要,查看原文内容请购买。
弹性高超声速飞行器输入饱和抑制backstepping控制
提出方法的有效性。
关键词:高超声速飞行器;弹性;backstepping;饱和抑制;干扰观测器
中图分类号:V448.2
文献标志码:A
DOI: 10. 13465/j. .nki. .vs. 2019. 20. 007
Saturation restraint of inputs backstepping control for a fexible hypersonic vehicle
Key words: hypersonic vehicle; elasticity; backstepping; saturation restraint; disturbance obse/er
高超声速飞行器是指飞行马赫数大于 5的飞行 器[1]&它具有机动灵活、隐身性高、突防能力强等特 点,可以作为战略突袭武器的发射平台 ,因而受到了各 个航天强国的广泛关注。其中,乘波体构形的吸气式 高超声速飞行器(Aiob/ahing Hypersonic Vehicle, AHV)因具有较高的升阻比,被认为是高超声速飞行器 最好的气动外形⑷,具有广阔的应用前景。
backstepping的输入饱和抑制非线性控制方法。考虑升降舵偏转量对升力的影响,引入新的虚拟控制量精准控制攻角状
态。将机体的弹性模态影响视作一类干扰项,设计非线性干扰观测器对其进行估计,并在控制器中予以补偿。引入非线
性增益函数提高系统控制输入量的饱和抑制能力,并基于李雅普诺夫理论证明了闭环系统的稳定性。仿真分析验证了所
LU Yao, SUN You, LU Kunfeng
( Beo.ongAeaospaceAuiomaiocConiaoeInsioiuie, Be o.ong 100854 , Chona)
一种干扰补偿的高超声速变后掠翼飞行器跟踪控制方法
一种干扰补偿的高超声速变后掠翼飞行器跟踪控制方法高超声速飞行器的跟踪控制是航空领域中的一个关键问题。
由于高超声速飞行器的飞行速度快,飞行过程中面临的干扰较大,因此需要有效的控制方法来提高飞行器的稳定性和控制精度。
本文提出了一种干扰补偿的高超声速变后掠翼飞行器跟踪控制方法,旨在解决高超声速飞行器跟踪过程中的干扰问题,以提高飞行器的控制精度和稳定性。
1. 高超声速变后掠翼飞行器的跟踪控制需求高超声速飞行器是指飞行速度超过5倍音速的飞行器。
由于高超声速飞行器飞行速度快,飞行过程中会遇到较大的气动力和干扰,给跟踪控制带来了困难。
因此,需要开发一种有效的跟踪控制方法来解决这个问题。
2. 干扰对高超声速变后掠翼飞行器跟踪控制的影响干扰是指飞行器在飞行过程中受到的各种外界因素的影响,如气动力、风速、湍流等。
这些外界因素会引起飞行器偏离预定轨迹,影响跟踪控制的性能。
因此,需要采取措施来补偿干扰,提高跟踪控制的精度和稳定性。
3. 干扰补偿的原理与方法干扰补偿是通过对干扰进行监测、分析和预测,并利用控制系统进行补偿,使飞行器能够准确跟踪预定轨迹。
具体的干扰补偿方法可以包括模型预测控制、自适应控制、模糊控制等。
在本文中,我们提出了一种基于模型预测控制的干扰补偿方法。
4. 基于模型预测控制的干扰补偿方法模型预测控制是一种基于模型的控制方法,它通过预测系统的未来状态,并根据预测结果进行控制,以实现对系统的稳定性和精确性的控制。
在基于模型预测控制的干扰补偿方法中,首先需要建立高超声速变后掠翼飞行器的数学模型,并进行参数辨识。
然后,通过预测系统的未来状态,获取到干扰的信息。
最后,利用控制器对干扰进行补偿,使飞行器能够准确跟踪预定轨迹。
5. 举例说明为了更好地理解基于模型预测控制的干扰补偿方法,我们以某种高超声速变后掠翼飞行器为例。
首先,我们建立了该飞行器的数学模型,并通过实验进行参数辨识。
然后,在飞行过程中,我们监测并分析了干扰的来源和影响。
基于自抗扰控制技术的高超声速飞行器控制研究
基于自抗扰控制技术的高超声速飞行器控制研究基于自抗扰控制技术的高超声速飞行器控制研究近年来,高超声速飞行器在航空航天领域引起了广泛的关注。
高超声速飞行器的出现不仅极大地推动了航空技术的发展,也对飞行器控制技术提出了更高的要求。
由于高超声速飞行器的特殊工况,传统的控制方法已经无法满足需求,因此,研究基于自抗扰控制技术的高超声速飞行器控制成为了一个重要课题。
高超声速飞行器控制涉及到多个方面的问题,如姿态控制、飞行路径跟踪和飞行稳定性等。
其中,姿态控制是高超声速飞行器控制中最为关键的一环。
由于高超声速飞行器的高速飞行特性,其姿态变化剧烈,传统的姿态控制方法已经无法满足需求。
因此,基于自抗扰控制技术的姿态控制成为了高超声速飞行器控制的研究热点。
基于自抗扰控制技术的姿态控制,主要通过引入扰动观测器和控制器来实现。
扰动观测器可以对外部扰动进行估计和补偿,从而使系统具备更好的抗干扰能力。
控制器通过根据扰动观测器的估计结果进行修正,实现对飞行器姿态的精确控制。
通过引入自抗扰控制技术,可以提高姿态控制系统的鲁棒性和稳定性。
在高超声速飞行器的控制研究中,利用自抗扰控制技术能够解决多种问题。
首先,由于高超声速飞行器飞行速度较快,飞行器表面会受到强烈的气动力和热载荷的影响,这些扰动会对姿态控制系统产生较大的影响。
利用自抗扰控制技术,可以精确估计和补偿这些扰动,使飞行器姿态控制系统具备更好的鲁棒性。
其次,高超声速飞行器由于飞行速度较快,对操纵输入的敏感性较高。
传统的姿态控制方法很难应对高超声速飞行器在不同工况下对操纵输入的高要求。
利用自抗扰控制技术,可以通过引入控制器来修正操纵输入,以实现高超声速飞行器在不同工况下的精确控制。
最后,高超声速飞行器的飞行特性非常复杂,例如激波和边界层的相互作用以及失稳现象等。
传统的控制方法很难满足高超声速飞行器对飞行稳定性的要求。
利用自抗扰控制技术,可以实现对飞行器飞行稳定性的优化。
综上所述,基于自抗扰控制技术的高超声速飞行器控制研究具有重要的实际意义。
高超声速飞行器飞行轨迹的模糊控制设计
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 1 高超声速飞行器纵向模型示意图 Fig. 1 The configuration of longitudinal model of hypersonic vehicle
α ˙ = q − γ, ˙ q ˙ = Myy /Iyy .
式中:
(4) (5)
2.2 高 超声速 飞行器 模型的 严反馈 形式(Hypersonic vehicle model in strict-feedback form)
Fuzzy adaptive control for hypersonic vehicle via Backstepping method
GAO Dao-xiang1 , SUN Zeng-qi1 , LUO Xiong2 , DU Tian-rong3
(1. State Key Laboratory of Intelligent Technology and System, Department of Computer Science and Technology, Tsinghua University, Tsinghua National Laboratory for Information Science and Technology, Beijing 100084, China; 2. School of Information Engineering, University of Science and Technology Beijing, Beijing 100083, China; 3. An-Shan Iron and Steel Corporation, Anshan Liaoning 114043, China)
2
高超声速飞行器的模型及其严反馈形 式(Hypersonic vehicle model and its strictfeedback form)
高超声速飞行器是具有六自由度的复杂非线 性 系 统, 本 文 只 考 虑 高 超 声 速 飞 行 器 纵 向 模 型 的Backstepping控制器设计, 但本文的方法对于六 自由度高超声速飞行器的控制具有普遍意义.
件与传统的飞行器有很大区别, 但可借鉴传统飞行 控制器的设计方法, 而基于Backstepping[8] 的自适应 控制策略却是传统飞行控制乃至一类复杂非线性系 统控制比较有效的方法. 文献[9∼11]研究了不确定 非线性系统和飞行系统的Backstepping控制器设计 方法, 文献[12]使用神经网络为战斗机的飞行控制 设计了Backstepping自适应重构系统, 使飞机在出现 舵面故障时能够在线重构控制律, 保持稳定并维持 一定的控制品质. 本文根据高超声速飞行器模型阶次高, 参数变化 大的特点, 给出了模糊自适应控制器的设计方法, 对 给定的速度指令跟踪, 采用动态逆控制方法; 对给定 的高度指令, 采用Backstepping方法. 系统中的未知
收稿日期: 2007−03−21; 收修改稿日期: 2008−01−07. 基金项目: 中国博士后科学基金资助项目(20070410528); 国家自然科学基金资助项目(90405017, 90716021, 60604010); 空间智能控制技术 国家级重点实验室基金项目(SIC07010202).
式中βc 为控制器的输出控制指令.
第5期
高道祥等: 基于Backstepping的高超声速飞行器模糊自适应控制
∗T ∗T z ˙1 = g1 (V )[θ1 ξ1 (Z1 ) − σ1 ψ1 (V )x ˙ 1d +
807
3 模 糊 自 适 应 控 制 设 计 (Fuzzy adaptive controller design)
806
控 制 理 论 与 应 用
第 25 卷
项由模糊自适应系统进行补偿, 仿真说明算法在速 度和高度控制中具有较好的跟踪性与鲁棒性.
注1
由式 (1)∼(5) 可以看出, 速度的变化主要与油门
的开度 β 相关, 见式 (1), 而高度的变化主要与舵偏角 δE 相 关, 见式 (2)∼(5), 因此我们将速度控制器与高度控制器分 开设计, 前者采用动态逆控制, 后者采用 Backstepping 方法, 对于模型中的未知项, 采用模糊自适应系统在线辨识. 以下 高超声速飞行器模型的严反馈形式是针对式(2)∼(5)而言 的.
L = qSCL , D = qSCD , T = qSCT , Myy = qSc[CM (α) + CM (δE ) + CM (q )], r = h + Re , CL = 0.6203α, CD = 0.6450α2 + 0.0043378α + 0.003772, 0.02576β, β < 1, CT = 0.0224 + 0.00336β, β > 1, CM (α) = 0.035α2 +0.036617α +5.3261 × 10−6 , CM (q ) = (c/2V )q (−6.796α2 +0.3015α − 0.2289), CM (δE ) = ce (δE − α),
2.1
高 超 声 速 飞 行 器 的 纵 向 模 型(Longitudinal model of hypersonic vehicle)
高超声速飞行器如图1所示, 图中: Xb , Yb 和Zb 表 示机体坐标, Xi 为参考坐标, 其通用的纵向模型如 下: ˙ = T cos α − D − µ sin γ , (1) V m r2 L + T sin α µ − V 2 r cos γ γ ˙= − , (2) mV V r2 ˙ = V sin γ, h (3)
第 25 卷第 5 期 2008 年 10 月
文章编号: 1000−8152(2008)05−0805−06
控 制 理 论 与 应 用
Control Theory & Applications
Vol. 25 No. 5 Oct. 2008
基 于 Backstepping的 高 超 声 速 飞行 器 模 糊 自 适 应控 制
高道祥1 , 孙增圻1 , 罗 熊2 , 杜天容3
(1. 清华大学 计算机科学与技术系智能技术与系统国家重点实验室, 清华信息科学与技术国家实验室, 北京 100084; 2. 北京科技大学 信息工程学院, 北京100083; 3. 鞍山钢铁集团公司, 辽宁 鞍山 114043)
摘要: 提出了高超声速飞行器的模糊自适应控制方法. 根据飞行器纵向模型的特点, 分别设计了基于动态逆的速 度控制器和基于Backstepping的高度控制器, 模糊自适应系统用来在线辨识飞行器模型由于气动参数的变化而引起 的不确定性, 采用Lyapunov理论设计的自适应律保证了系统的稳定性与指令跟踪的精确性. 仿真使用了高超声速 飞行器的纵向模型对算法进行了验证, 得到了较满意的控制效果. 关键词: 高超声速飞行器; Backstepping; 动态逆; 飞行控制; 模糊自适应控制 中图分类号: V 249.1 文献标识码: A
n n
x ˙ 1 ≈ f1 (x1 , V ) + g1 (V )x2 , x ˙ 2 = f2 + g2 x3 , x ˙ 3 = f3 (x2 , x3 , V ) + g3 (V )u.
式中:
(7) (8) (9)
f1 (x1 , V ) = − f2 = 0,
µ − V 2 r cos γ − g1 (V )γ, V r2
f3 (x2 , x3 , V ) = qSc[CM (α) + CM (q ) − ce α]/Iyy , g1 (V ) = qS × 0.6203/(mV ), g2 = 1, g3 (V ) = qScce /Iyy .
假设 3 f1 (x1 , V ), f3 (x2 , x3 , V ), g1 (V )和g3 (V )为 光滑函数, 存在常数gi1 gi0 > 0, 使gi1 gi (V ) 2 gi0 > 0且g ˙ i (V )/gi (V ) ≈ 0, i = 1, 3.
3.1 Backstepping高度 控制(Attitude controller design via Backstepping method)
Backstepping控制是针对一类严反馈系统而言, 控制信号由一系列虚拟控制量递归计算得到, 控制 器设计是基于Lyapunov稳定性理论进行的, 能够保 证闭环系统的所有信号是一致终值有界的. 1) 由于式(3)在航迹角变化的范围之内−90◦ γ < 90◦ 为精确的一一对应的非线性映射(实际上航 迹角的变化远远小于这个范围), 因此可通过式(3)的 逆变换, 将给定的理想高度指令转换成理想的航迹 角指令来设计高度跟踪控制器, kP (h − hd ) + kI (h − hd )dt γd = arcsin . (10) V 式中: kP > 0, kI > 0为常数. 2) 定义z1 = x1 − x1d , 其中x1d = γd . 对z1 进行 微分得
为得到高超声速飞行器模型的严反馈形式, 作如 下假设: 假 设 1 式(2)中的推力项T sin α远远小于升力 项L, 可认为T sin α ≈ 0. 假 设 2 高超声速飞行器的飞行速度变化较慢, 且变化范围较小. 由图1, 俯仰角θp = α + γ . 定义x = [x1 , x2 , x3 ]T , x1 = γ , x2 = θp , x3 = q , u = δE , 根 据 假 设, 式(2)∼(5)可改写为严格反馈形式:
式中: q = ρV 2 /2为气动压力, V , γ , h, α, q 分别表 示飞行器的速度、 航迹倾角、 高度、 攻角和俯仰角 速度; T , D, L 和Myy 分别表示推力、 阻力、 升力和 俯仰转动力矩; m, Iyy , S , µ和Re 分别表示飞行器的 质量、 俯仰转动惯量、 参考气动面积、 重力常数和地 球半径, c和ce 为常数. 控制量为舵偏角δE 和油门开 度β . 发动机动态模型为, ¨ = −2ξωn β ˙ − ω 2 β + ω 2 βc , β (6)