防喘振功能详解
风机如何“防喘振”
风机如何“防喘振”一、喘振定义喘振,顾名思义就象人哮喘一样,风机出现周期性的出风与倒流,相对来讲轴流式风机更容易发生喘振,严重的喘振会导致风机叶片疲劳损坏。
流体机械及其管道中介质的周期性振荡,是介质受到周期性吸入和排出的激励作用而发生的机械振动。
例如,泵或压缩机运转中可能出现的喘振过程是:流量减小到最小值时出口压力会突然下降,管道内压力反而高于出口压力,于是被输送介质倒流回机内,直到出口压力升高重新向管道输送介质为止;当管道中的压力恢复到原来的压力时,流量再次减少,管道中介质又产生倒流,如此周而复始。
喘振的产生与流体机械和管道的特性有关,管道系统的容量越大,则喘振越强,频率越低。
一旦喘振引起管道、机器及其基础共振时,还会造成严重后果。
为防止喘振,必须使流体机械在喘振区之外运转。
在压缩机中,通常采用最小流量式、流量-转速控制式或流量-压力差控制式防喘振调节系统。
当多台机器串联或并联工作时,应有各自的防喘振调节装置。
二、风机喘振的现象1、风机抽出的风量时大时小,产生的风压时高时低,系统内气体的压力和流量也发生很大的波动。
2、风机的电动机电流波动很大,最大波动值有50A左右。
3、风机机体产生强烈的振动,风机房地面、墙壁以及房内空气都有明显的抖动。
4、风机发出“呼噜、呼噜”的声音,使噪声剧增。
5、风量、风压、电流、振动、噪声均发生周期性的明显变化,持续一个周期时间在8s左右。
三、喘振的原因根据对轴流式通风机做的大量性能试验来看,轴流式通风机的p-Q性能曲线是一组带有驼峰形状的曲线(这是风机的固有特性,只是轴流式通风机相对比较敏感),如左图所示。
当工况点处于B点(临界点)左侧B、C之间工作时,将会发生喘振,将这个区域划为非稳定区域。
发生喘振,说明其工况已落到B、C之间。
离心压缩机发生喘振,根本原因就是进气量减少并达到压缩机允许的最小值。
理论和实践证明:能够使离心压缩机工况点落入喘振区的各种因素,都是发生喘振的原因。
防喘振功能详解

DUMP输出: 输出: 输出
当向喘振控制线左方出现特定窜动时,可组态一个触点输 出打开大功率电磁阀,来使防喘阀快开。此特性对于有较 短阀程的大阀门来说很有用。当系统从喘振状态回来时, 电磁阀关。对阀的控制则可从比例控制恢复到正常的喘振 控制。
防喘振控制
在本套系统中,我们利用TRICON 防喘振扩展函数模块来完成压缩机的防喘振 控制。 防喘振扩展函数及功能块说明 在本套系统中,我们利用TRICON 防喘振扩展函数功能模块来完成压缩机的防 喘振控制。应用在防喘振控制中 防喘振扩展函数文件名: SGA31-02.LT2 防喘振扩展函数的各功能块作用如下: 喘振线功能块(Surge_Line)COMPRESSOR_SURGE_LINE 喘振监测功能块(Surge_Detect_02)COMPRESSOR_SURGE_DETECT 喘振调节功能块(Surge_Control_02)COMPRESSOR_SURGE_CONTROL
喘振检测功能块(Surge_Detect_02)
在本程序中,我们使用的是压比aPRATIO102J1 对流量差压rHX102J1(Pd/Ps 对h/ Ps)的算法。 在完全手动状态下gMANUAL 置1,输出阀位由操作员在HMI“手动输出”上给 出,当在半自动状态下,手动控制时,喘振控制优先。 本程序喘振控制模式采用压比rPRATIO(Pd/Ps 纵坐标)对能力rHX(h/ Ps 横 坐标)组成的坐标曲线,选压比算法时kSUMOD 设置为1,入口流量选择带温 度补偿即HXTYPE 设置为2,机组效率EFF=0.85, 热容比K=1,入口压力单元 (表压刻度)X=5(模块内有压力补偿101.3KPa),出口压力单元(表压刻度) Y=5(模块内有压力补偿101.3KPa),温度单元Z=2(摄氏度)。 压缩机基准温度Tb(40.0℃),孔板基准温度Tbo(40.0℃),基准压力Pb ( 70.0KPa),孔板 基准压力Pbo ( 70.0KPa), 安全裕度偏置KEBIAS=10, 比例安全裕度即安全裕度线修正置KEPROP=7,喘振线裕度rADMARC1。 喘振点为rSULIN,压比为rPRATIO(Pd/Ps),能力为rHX(H/Ps)
压缩机防喘振系统出现的问题及防范措施

压缩机防喘振系统出现的问题及防范措施
压缩机防喘振系统是用于防止压缩机在工作过程中出现喘振现象的一种控制系统。
喘振是指压缩机在运行过程中由于压力倒挂和气阀开闭不当等原因,使得压缩机出现杂音、振动加剧,甚至引起设备损坏的现象。
1. 振动增大:喘振会使得压缩机的振动加剧,导致设备整体的振动增大,从而造成设备寿命降低、设备故障增多等问题。
2. 噪音增大:喘振会使得压缩机发出较大的噪音,影响工作环境和工人的身心健康。
3. 能耗增加:喘振会使得压缩机的工作效率下降,从而导致能耗增加,造成能源的浪费。
4. 设备损坏:喘振会使得压缩机的工作过程不稳定,从而可能导致设备的损坏,增加维修和更换的成本。
1. 定期检修:定期检修压缩机,对机械设备、气阀等进行维护和修理,确保其正常工作。
2. 合理选型:在选用压缩机时,需要根据实际工况和设备需要,选择合适的型号和规格,减少喘振的可能性。
3. 安装调试:在安装压缩机时,需要严格按照厂家的要求进行安装和调试,确保设备的稳定运行。
4. 加装减振装置:在压缩机的进出口处加装减振装置,减少设备振动对周围环境和设备的影响。
5. 增加控制系统:增加喘振控制系统,可以监测和控制压缩机的工作状态,及时采取措施避免喘振的发生。
6. 做好运行维护:在压缩机工作过程中,要做好运行控制和维护,及时清洁设备和更换损坏的部件,确保设备的正常工作。
7. 培训工作人员:对使用压缩机的工作人员进行培训,提高其对喘振现象的识别和处理能力,减少人为操作引起的喘振问题。
通过采取上述防范措施,可以有效降低压缩机防喘振系统出现问题的可能性,提高设备的安全性和稳定性,延长设备的使用寿命,减少生产成本。
防喘振阀工作原理

防喘振阀工作原理
防喘振阀是一种用来防止管道系统中出现水锤现象的设备。
在管道中输送液体时,当管道中的阀门突然关闭时,液体会因为惯性而继续流动,导致管道中产生压力波,进而引起水锤现象。
水锤会导致管道中的设备和管路受到损害,甚至引发爆炸事故,因此需要采用防喘振阀进行控制。
防喘振阀的工作原理是:当管道中的阀门关闭时,防喘振阀会迅速开启,将管道中的液体引入阀内,使其自由扩张,从而消除管道中的压力波。
一旦管道中的压力波被消除,防喘振阀便会迅速关闭,保持管道的正常工作状态。
防喘振阀通常由一个主阀和一个阀芯组成。
当管道中的液体流经主阀时,阀芯会受到流体作用力,从而迅速打开。
一旦液体中断或流量减少,阀芯会迅速关闭,避免管道中产生水锤现象。
总之,防喘振阀是一种非常重要的管道控制设备,可以有效地保护管道系统和相关设备不受水锤现象的影响。
- 1 -。
防喘振的方案
防喘振的方案1. 引言防喘振是一种重要的防护措施,用于避免机械系统的不稳定振动。
喘振是机械系统受到扰动或负载变化时出现的低频振动现象,可能导致机械设备破坏或故障。
本文将介绍几种常用的防喘振方案,并进行评估和比较。
2. 调整系统刚度调整系统刚度是一种常见的防喘振方案。
由于喘振通常发生在系统的固有频率附近,通过增加或减小系统的刚度,可以改变系统的固有频率,从而防止喘振的发生。
可以通过以下方法调整系统的刚度:•更换或增加机械零件的数量或材料,改变系统的刚度。
•调整系统的支承形式,改变系统的刚度。
•调整系统的几何形状,改变系统的刚度。
调整系统刚度的方法有效性较高,但需要对系统进行全面的分析和评估,并可能需要进行大量的工程设计和改造。
3. 添加阻尼装置阻尼装置可以通过吸收或消散机械系统的振动能量来减少振动幅度,从而防止喘振的发生。
添加阻尼装置是一种简单且有效的防喘振方案。
可以使用以下类型的阻尼装置:•液体阻尼器:通过通过流体的黏滞阻力来减缓系统的振动。
•摩擦阻尼器:通过摩擦阻尼力来减弱系统的振动。
•磁流变阻尼器:通过调节磁流变材料的磁场来改变阻尼特性。
添加阻尼装置通常可以在现有系统上进行简单的改装,并且对系统产生的影响较小。
4. 使用主动控制技术主动控制技术是一种高级的防喘振方案,可以根据系统的实时状态和反馈信息,动态地调整系统的参数,以抵消或抑制振动。
常用的主动控制技术包括:•主动质量调谐(AMT):通过调节振动质量的参数,实时调整系统的固有频率,以消除振动。
•主动回路控制(ACL):通过改变系统的控制回路参数,动态地抑制喘振的出现。
•主动阻尼控制(ADC):通过改变系统的阻尼控制器参数,实时调整阻尼特性,以减少振动。
使用主动控制技术需要使用传感器和控制算法来实现对系统的实时监测和调整。
这种方案的设计和实施较为复杂,并且对系统的响应时间有严格的要求。
5. 对比和评估在选择防喘振方案时,需要综合考虑以下因素进行对比和评估:•效果:不同方案对喘振现象的抑制程度和稳定性有所不同,需要根据具体情况选择。
防喘振
1. 压缩机的防喘振控制方案以往方案大致可分为固定极限流量和可变极限流量防喘振控制两类。
但到目前为止,对于不同摩尔质量、温度、压力的压缩气体,还没有一种切实可行的方法来有效、精确地计算压缩机的喘振线,通常都是建立一个较大的额外安全空间,保证机组在可预设的最佳工作状况下安全运行,但这种方法使得压缩机的工作效率大为降低,因此有关的专业技术人员一直在寻找更有效的方法来解决防喘振控制过程中的安全与效率问题。
TS3000 系统的成功应用,就较好地解决了此问题。
2. 喘振线作图的基本方法压缩机防喘振控制系统的基本原理,如图2 所示。
图中:Yl=Y2/Y3=Pd/Ps=(PT2+ 1.0332)/(PT1+1.0332);SP=Y4=V(Pd/Ps)+K(给定);Y5= h/Ps=FT5/(PT1+1.0332)(测量)采用Pd/Ps 和c·h/Ps 做喘振曲线,其基本形状为抛物线,而采用Pd/Ps 和(c· h/Ps )2作图时得到的喘振线则在工作点附近基本呈直线形状(简化后,C2h/Ps)。
其关系式如下:h/Ps=V·(Pd/Ps)+K式中,Pd—压缩机出口压力(绝压),kPa;Ps—压缩机入口压力(绝压),kPa;C—常数(由孔板尺寸决定),m2;h—孔板差压(与流量的关系式为Q2=H),kPa3. 工艺控制方案(1)压缩机防喘振调节画面组成(a)防喘振动态示意图,将压缩机实际工作点在防喘振示意图上相应显示。
(b)动态数据,将实际工作点数据在ESD 画面相应处显示。
(c)点击ESD 流程图上相应调节阀,可弹出PID 画面,可在线修改设定值或输出值。
(2)调节防喘振电磁阀设定3 种状态,正常运转状态下,可设定自动调节,开停工或异常状态下,可设定手动调节或强制调节。
(3)报警利用声光报警及画面报警提示。
(4)控制要点(a)开压缩机前,应先将防喘振阀强制打开至100%。
(b)当压缩机实际工作点靠近防喘振线时,应提高压缩机转速,维持正常生产,若压缩机转速已达最大,则应打开防喘振阀,并适当降低装置负荷,保证压缩机的正常运行。
第一章离心压缩机防喘振控制
4.2 离心压缩机防喘振控制4.2.1 离心压缩机的喘振1.离心压缩机喘振现象及原因离心式压缩机在运行过程中,可能会出现这样一种现象,即当负荷低于某一定值时,气体的正常输送遭到破坏,气体的排出量时多时少,忽进忽出,发生强烈震荡,并发出如同哮喘病人“喘气”的噪声。
此时可看到气体出口压力表、流量表的指示大幅波动。
随之,机身也会剧烈震动,并带动出口管道、厂房震动,压缩机会发出周期性间断的吼响声。
如不及时采取措施,将使压缩机遭到严重破坏。
例如压缩机部件、密封环、轴承、叶轮、管线等设备和部件的损坏,这种现象就是离心式压缩机的喘振,或称飞动。
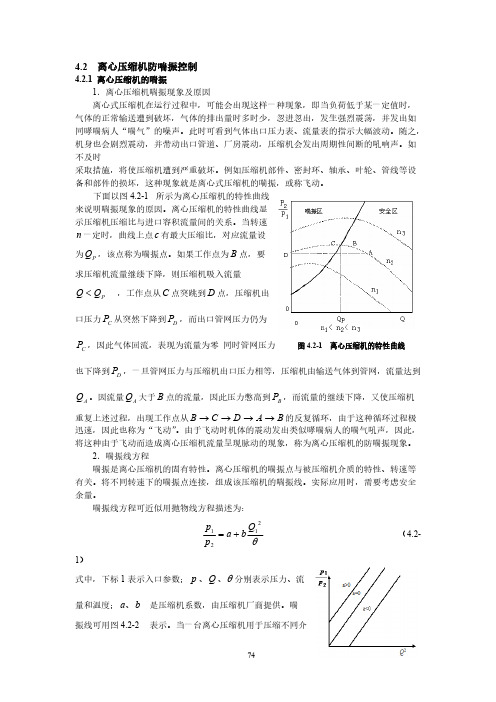
下面以图4.2-1 所示为离心压缩机的特性曲线来说明喘振现象的原因。
离心压缩机的特性曲线显示压缩机压缩比与进口容积流量间的关系。
当转速一定时,曲线上点有最大压缩比,对应流量设n c 为,该点称为喘振点。
如果工作点为点,要P Q B 求压缩机流量继续下降,则压缩机吸入流量,工作点从点突跳到点,压缩机出P Q Q <C D 口压力从突然下降到,而出口管网压力仍为C PD P ,因此气体回流,表现为流量为零 同时管网压力 图4.2-1 离心压缩机的特性曲线C P 也下降到,一旦管网压力与压缩机出口压力相等,压缩机由输送气体到管网,流量达到D P 。
因流量大于点的流量,因此压力憋高到,而流量的继续下降,又使压缩机A Q A Q B B P 重复上述过程,出现工作点从的反复循环,由于这种循环过程极B A D C B →→→→迅速,因此也称为“飞动”。
由于飞动时机体的震动发出类似哮喘病人的喘气吼声,因此,将这种由于飞动而造成离心压缩机流量呈现脉动的现象,称为离心压缩机的防喘振现象。
2.喘振线方程喘振是离心压缩机的固有特性。
离心压缩机的喘振点与被压缩机介质的特性、转速等有关。
将不同转速下的喘振点连接,组成该压缩机的喘振线。
实际应用时,需要考虑安全余量。
喘振线方程可近似用抛物线方程描述为:(4.2-θ2121Q b a p p +=1)式中,下标1表示入口参数;、、分别表示压力、流p Q θ量和温度;是压缩机系数,由压缩机厂商提供。
循环气压缩机防喘振控制
资料范本本资料为word版本,可以直接编辑和打印,感谢您的下载循环气压缩机防喘振控制地点:__________________时间:__________________说明:本资料适用于约定双方经过谈判,协商而共同承认,共同遵守的责任与义务,仅供参考,文档可直接下载或修改,不需要的部分可直接删除,使用时请详细阅读内容循环气压缩机防喘振控制摘要:本文系统介绍TRICON系统在循环气压缩机机组防喘振控制的应用及控制原理。
重点介绍防喘振系统的功能模块的构建,同时简述机组运行故障时的检修方法与分析思路。
关键词定义:喘振机理喘振线防喘振控制安全裕量盘旋设定点1、前言:大型离心式压缩机组由于其高效,经济,在现代企业中应用广泛,成为工艺连续运行的“心脏”。
但是由于其造价相对于往复式压缩机而言要高很多,控制系统复杂,而且占用的空间大等缺点,对于工艺成熟的企业一般不设置备用机组。
喘振是离心式压缩机固有的特性,每一台离心式压缩机都有它一定的喘振区,因此只能采取相应的防喘振调节方案以防止喘振的发生。
本文以天利高新技术公司醇酮厂的循环气压缩机C41101(SVK1-H型)为例,详细介绍TRICON三重化控制系统如何构建机组防喘振系统,并简述防喘振仪表常见故障的处理方法。
2、离心式压缩机喘振机理:离心式压缩机的特性曲线与喘振离心式压缩机的特性曲线是指压缩机的出口压力与入口压力之比(或称压缩比)与进口体积流量之间的关系曲线P2/P1~Q的关系,其压缩比是指绝对压力之比,特性曲线如图所示:图2.1 离心式压缩机喘振曲线由图2.1可见,其特性曲线随着转速不同而上下移动,组成一组特性曲线,而且每一条特性曲线都有一个最高点。
如果把各条曲线最高点联接起来得到一条表征喘振的极限曲线,如图中虚线。
所以,图中还有阴影部分称为喘振(或飞动)区;在虚线的右侧为正常工作区。
实线与虚线之间是临界区,压缩机可以运行,但太靠近喘振区,应尽量避免长期工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
通用喘振线
喘振参数
压缩机的喘振点可由压比(Pd/Ps)及入口流量表测出的入口流量计 算得出。入口流量的测量值与 Pd, Ps, Td,及Ts等可用来计算等价孔板 值h(该孔板可视为位于压缩机的入口),进而作出喘振预测。 防喘控制的 I/O要求 Tag Type Function PT AI 入口/出口压力 TT AI 入口/出口温度 FT AI 入口流量 PV AO 防喘阀 SOV DO 旁路/放空阀 ESD DI 跳车输出
4
4 6 . 2 ,4 . 2 ( x 2 , y 2 ) 4 0 .5 ,3 .3 (x 1 ,y 1 )
3
2 1 0 20 40 h /P s
%
60
80
100
喘振曲线- 喘振曲线-压升
100 9 2 .6 ,9 8 .5 (x 4 ,y 4 ) 80 DP 6 0 .8 ,8 6 .8 (x 3 ,y 3 )
模块 10 计算喘振-速度耦合控制器的值。如果喘振发生,控制逻辑会 使控制器的设定值增加,使机组的转速升高增大入口流量防止喘振。 当然如果转速升高,机组的出口压力进一步升高,有可能继续引起喘 振,就应该解除耦合实现解耦控制。 模块 11 实现喘振控制逻辑的硬手动,软手动(半自动)及自动控制功 能。如果在硬手动方式,快速PID控制器的输出值不起作用。如果在软 PID 手动方式,快速PID控制器仍然监视机组的运行情况,防止机组发生喘 振。 模块 12 阀门预置功能,用来提供阀门的响应速度。 模块 13 对等百分比伐进行线性化处理,提供其响应特性。 模块 14 如果联锁停车,用开关量信号紧急打开防喘伐。
TRICON 喘振控制器特性
特性简介: 特性简介: 因为喘振发生得很快,必须使用特殊的控制技术来保证防喘阀及时打开。 TRICON控制器的运算速度很快,而且能够高效处理复杂的算法,所以 TRICON控制器可以理想地实现防喘控制。 防喘控制策略的标准特性有: 防喘控制策略的标准特性有: 可选择Pd/Ps对h/Ps或Dp对h的算法 如果喘振发生,喘振安全裕度可自动调整 设定点浮动线功能可以在工作点向喘振线窜动时及时打开防喘阀 特殊的喘振控制器带有适应增益及快开/慢关响应等功能 比例调节功能可以‘迫使’防喘阀独立于控制过程而打开 灵活的起机和跳车逻辑 可选择手动控制帮助设定、测试和故障排除 当喘振逼近或透平跳车时,电磁阀触点输出可“打开”防喘阀
说明:如果实际应用需要,以上特性均可实现,未要求的特性则不予实现。
压比或压升算法选择: 压比或压升算法选择:
如前所述,根据使用需要,可选两种防喘算法之一进行组态。喘振线最 多可以设置到10段。下面的图例显示的是4段的喘振线。 喘振曲线- 喘振曲线-压比
6 9 2 . 6 ,5 . 8 ( x 4 , y 4 ) 5 Pd Ps 6 0 .8 ,5 .1 8 (x 3 ,y 3 )
DUMP输出: 输出: 输出
当向喘振控制线左方出现特定窜动时,可组态一个触点输 出打开大功率电磁阀,来使防喘阀快开。此特性对于有较 短阀程的大阀门来说很有用。当系统从喘振状态回来时, 电磁阀关。对阀的控制则可从比例控制恢复到正常的喘振 控制。
防喘振控制
在本套系统中,我们利用TRICON 防喘振扩展函数模块来完成压缩机的防喘振 控制。 防喘振扩展函数及功能块说明 在本套系统中,我们利用TRICON 防喘振扩展函数功能模块来完成压缩机的防 喘振控制。应用在防喘振控制中 防喘振扩展函数文件名: SGA31-02.LT2 防喘振扩展函数的各功能块作用如下: 喘振线功能块(Surge_Line)COMPRESSOR_SURGE_LINE 喘振监测功能块(Surge_Detect_02)COMPRESSOR_SURGE_DETECT 喘振调节功能块(Surge_Control_02)COMPRESSOR_SURGE_CONTROL
60
4 6 .2 ,6 2 .2 (x 2 ,y 2 ) 4 0 .5 ,4 4 .9 (x 1 ,y 1 )
40
20 0 0 20 40 60 80 100
h O rific e D iffe re n tia l %
安全裕度重校: 安全裕度重校:
如果系统检测到工作点越过喘振线,表示喘振已发生,喘振控制线将被自动调节 到右方,而加大安全余量。 可能导致喘振的条件有: 因压缩机磨损导致喘振线移位 变送器调校不准确 安全裕度不足 过程条件突变 喘振线设置错误 每当如前述喘振被检测到,安全裕度增加(控制线右移)一个校准量。输入一个 裕度新值可使瞬态计数器归零,且使重校后的裕度等于输入值。系统可组态为每 次增加一个固定量(如2%),或一个累加量(如1,2,4,8%等)。重校发生 的最大次数亦可组态。 系统可显示如下量: 喘振发生次数(校准次数) 初始安全裕度 当前重校后的安全裕度
设定点浮动线
Surge Line Control Line Control Setpoint
PD/PS
Current Operating Point
Hover Setting
Suction
x Flow
适应性增益和非对称响应: 适应性增益和非对称响应:
喘振控制器提供了一种适应性增益特性。当工作点在喘振 控制线右方时,该特性减少了比例动作。当工作点在喘振 控制线右方的操作裕度超过设定距离,则调用适应性增益 特性。 根据比例或积分响应,防喘阀可打开,但STRAIGHT RAMP功能限制了防喘阀的关闭。该特性使得防喘阀响应 快。当工作点安全地移到喘振控制线的右方,防喘阀以设 定速率慢关,保证将透平驱动机及工况控制器调整到新的 工作条件下。
模块 6 喘振控制器,这是一个PID控制器,根据喘振控制器的设定值及 当前的入口流量来计算出喘振控制器的输出值。 模块 7 计算喘振控制器的比例项输出。如工艺扰动特别大或其它原因, 造成机组突然喘振,喘振控制器来不及响应,这时该模块输出一个比 例项输出值,迅速打开防喘伐。 模块 8 计算机组启动时的控制逻辑输出值。在机组启动时,控制逻辑 使防喘伐全开,使机组安全启动,从而防止意外事故发生。 模块 9 选择防喘振控制程序的输出值。即在快速PID控制器的输出值, 比例项的输出值,机组启动时的逻辑控制器的输出值三者之间进行高 选。
功能块3
如果当前裕度rMAR < -1 喘振标志 (fINSUR= 1) 如果当前裕度rMAR > 1 喘振标志 (fINSUR= 0) 如果喘振标志fINSUR 置1,在HMI 喘振标志“灯”变红,喘振累积数 rSURNO 自动加1,在HMI 上显示“喘振累积数” rSURNO = rSURNO+ 1 如果喘振微调发生的数 rRECNO < kRECNO 允许微调数10,因微调增 量kRCIN=2(2%),故下移次数最多5 次。 如果微调类型kRECT = 0,微调增量Krcinc=2(2%) 喘振线下移裕度rADMAR = rADMAR + kRCIN 喘振微调发生的数rRECNO= rRECNO+ 1 并在HMI 上显示“喘振数”。
设定点浮动线: 设定点浮动线:
一般情况下,压缩机不会在喘振线上持续运行或过长时间运行。当工 作点在控制线右方(安全区域),喘振控制器的设定点(线)须在当前 h值的某一可设百分比范围内以可设值移动。当工作点越过设置点(浮 动线),以小幅快速向喘振线窜动时,将发生如下情形: 防喘阀迅速打开 设定点浮动线将以可设值移动直至防喘阀全关 新工作点建立 如果设定点浮动线与喘振控制线重合,系统将保持回流以保证在喘振控 制线上运行,此特性并非在所有条件下应用,在应用前亦需作充分评估
防喘控制方框图
TRICONEX的防喘控制系统可由各个独立的功 能模块来描述,每个模块都有各自已定义的功能, 并通过输入输出信号(均给出位号名)与其它功能 模块相互连接和作用。
防喘模块方框图
各块的功能介绍
TS3000控制系统的喘振控制功能用上图形象的表达,每一个模块都定 义一种具体的控制功能,各种控制功能相互作用,构成一个完整的防 喘振控制系统。 模块 1 选定控制算法。 模块 2 检测工作点离喘振控制曲线的远近情况。 模块 3 喘振安全域 (即喘振控制曲线与喘振曲线之间的距离)重新校 验,如果机组发生喘振,说明喘振安全域设得不太准确,需要自动重 新调整。 模块 4 生成喘振控制线,即喘振曲线加喘振安全域得到的喘振控制曲 线。 模块 5 计算出喘振控制器的设定值。振控制器的设定值根据工作点的 变化而变化。
比例功能: 比例功能:
系统有一纯比例调节阶段,该阶段可独立于正常PI控制器 打开防喘阀。当工作点移到喘振控制线左方,而正常PI控 制器无法提供足够响应,可能导致严重的过程失序时,则 进入该阶段。亦即在控制线左方到达某一特定裕度,则打 开防喘阀,进入该阶段。当工作点与喘振线重合时,防喘 阀全开。换言之,工作点进入喘振控制线及喘振线之间时, 防喘阀按比例打开。该比例阶段是由信号选择器来实现的。 控制器的反馈动作迫使控制器输出跟踪该阶段。 即使在喘振控制器失调Detect_02)
在本程序中,我们使用的是压比aPRATIO102J1 对流量差压rHX102J1(Pd/Ps 对h/ Ps)的算法。 在完全手动状态下gMANUAL 置1,输出阀位由操作员在HMI“手动输出”上给 出,当在半自动状态下,手动控制时,喘振控制优先。 本程序喘振控制模式采用压比rPRATIO(Pd/Ps 纵坐标)对能力rHX(h/ Ps 横 坐标)组成的坐标曲线,选压比算法时kSUMOD 设置为1,入口流量选择带温 度补偿即HXTYPE 设置为2,机组效率EFF=0.85, 热容比K=1,入口压力单元 (表压刻度)X=5(模块内有压力补偿101.3KPa),出口压力单元(表压刻度) Y=5(模块内有压力补偿101.3KPa),温度单元Z=2(摄氏度)。 压缩机基准温度Tb(40.0℃),孔板基准温度Tbo(40.0℃),基准压力Pb ( 70.0KPa),孔板 基准压力Pbo ( 70.0KPa), 安全裕度偏置KEBIAS=10, 比例安全裕度即安全裕度线修正置KEPROP=7,喘振线裕度rADMARC1。 喘振点为rSULIN,压比为rPRATIO(Pd/Ps),能力为rHX(H/Ps)