基于单片机的自动分拣机控制系统设计
基于的物料分拣机械手自动化控制系统设计

基于的物料分拣机械手自动化控制系统设计物料分拣机械手的自动化控制系统设计是一项关键性的任务,它决定着整个系统的性能和效率。
以下是一个基于物料分拣机械手的自动化控制系统设计的详细说明。
1.系统概述:物料分拣机械手自动化控制系统旨在提高物料分拣过程的效率和准确性,降低人工成本。
该系统可以根据预设的程序自动完成物料的分拣、搬运和堆放操作。
2.硬件设计:物料分拣机械手的硬件设计主要包括机械结构、传感器、执行器和控制器。
机械结构设计要考虑平稳且高速的物料搬运,确保机械手的刚性和稳定性。
传感器用于检测物料的位置、形状和重量等信息,可选用光电传感器、压力传感器等。
执行器通常使用伺服电机或气动元件,以保证机械手的准确控制。
控制器可以选用PLC控制器或单片机等,用于控制整个机械手系统的运动。
3.软件设计:物料分拣机械手的软件设计包括运动控制算法和分拣策略。
运动控制算法负责计算机械手运动轨迹和速度,使其能够快速和准确地搬运物料。
分拣策略主要包括物料的分类和堆放规则,根据物料的属性和目标位置,选择最优的分拣路径和顺序。
4.系统优化:为了提高系统的性能和效率,可以考虑以下优化措施:-优化机械结构,提高机械手的速度、精度和稳定性。
-优化传感器的选型和布置,提高物料检测的准确性和灵敏度。
-优化运动控制算法,减少机械手的运动时间和能耗。
-优化分拣策略,提高分拣的准确性和效率。
-进行系统的实时监控和故障诊断,及时发现和解决问题。
5.系统测试和调试:在系统设计完成后,需要进行系统测试和调试,以验证系统的性能和稳定性。
测试内容包括机械手的精度和速度测试,传感器的准确性和灵敏度测试,以及软件算法的测试和验证。
通过测试和调试,可以对系统进行进一步的优化和改进。
总结:基于物料分拣机械手的自动化控制系统设计涉及到多个方面,包括机械结构设计、传感器选型、执行器选择、控制器选型、软件算法设计等。
通过系统的优化和调试,可以提高物料分拣的效率和准确性,降低人工成本。
自动生产线分拣站控制系统设计论文

自动生产线分拣站控制系统设计引言在现代工业生产中,自动化技术的应用越来越广泛。
自动生产线分拣站是一个重要的环节,它可以提高生产效率和产品质量。
为了实现自动分拣,需要设计一个高效稳定的控制系统来管理和控制分拣站的运作。
本文将针对自动生产线分拣站控制系统的设计进行详细介绍。
首先,我们将分析自动分拣的特点和需求,然后介绍系统的整体架构和各个模块的功能设计。
之后,会详细讨论系统的数据流动和信息处理流程。
最后,我们将介绍系统的实现方法和预期效果。
自动分拣的特点和需求分析自动分拣是指通过机器人或其他自动化设备来完成对产品的分拣任务。
相比于人工分拣,自动分拣具有以下几个优点:1.提高生产效率:自动分拣可以减少人工操作,从而节省人力成本,加快生产速度,提高生产效率。
2.提高分拣准确性:自动分拣可以减少人为操作的误差,提高分拣的准确性和产品的质量。
3.提高工作安全性:自动分拣可以减少人工操作中的风险,提高工作的安全性。
基于以上优点,设计一个高效稳定的自动生产线分拣站控制系统是非常有意义和必要的。
系统架构和模块设计系统的整体架构如下图所示:+-------------------------+| || 自动生产线分拣站控制系统 || |+-------------------------+|+-------------------------+| || 设备控制模块 || |+-------------------------+|+-------------------------+| || 分拣任务调度模块 || |+-------------------------+|+-------------------------+| || 传感器数据处理模块 || |+-------------------------+系统包括三个主要模块:设备控制模块、分拣任务调度模块和传感器数据处理模块。
设备控制模块负责控制自动分拣设备的运作。
快递分拣机器人控制系统的设计

在地面的快递件进行自动分拣。通过制作样机验证了设计的合理性与可行性。
关键词:
分拣机器人控制系统设计
中图分类号:TH122
文献标志码:A 文章编号:1000 -4998(2020)01 -0013 -04
Abstract: In order to improve the eliciency of express sorting, a controO system of express sorting robot
technology. The STM32 single-chip microcomputer is used as the motion controO core, and the externaO sensor
senses the state of the robot. Based on the two- way communication between the seial port and the machine
电池电压变化范围为21. 6〜25.2 V。当电压低于
21.6 V时,需要充电。逻辑电路包括三部分:
视觉
模块、
6 感器。采用5 V直流电供电,则降压
稳压电路的输入电压为21.6〜25 V,输出电压为5 V&
考虑到要
视觉模块、
及 感器供电,供电
电路采用LM2596稳压芯片⑺,最大输出电流可达3
A,能 满足逻辑电路的丄作要求。逻辑电路的电源
@
大赛平台,已制作出
,运行效果
良好&
2
快递分拣机器人控制系统硬件组成如图1所示, 以STM32单片机为核心,通过接口电路连接机器视觉
模块%舵 、电机驱动模块、传感器模块和气泵吸盘控
基于STM32的智能分拣机器人系统设计

基于 STM32的智能分拣机器人系统设计摘要:本文研究的主要内容是单片机采集TCS230颜色传感器的数据进行数据对比,分拣颜色,从而输出指令给电机驱动板,单片机再采集灰度条的状态,判断小车坐标,进行路线规划,控制小车寻迹至各颜色对应的区域。
本论文的主要特点是,采用输出数字量的8路灰度条传感器进行小车的寻迹与坐标定位;使用4线spi通讯的OLED屏设计人机交互;使用4自由度的机械臂作为机器人搬运或夹取物品的工具。
关键词:环境监测;分拣、TCS230颜色识别、机械臂、单片机;1 引言今年来,随着中国快递行业的快速发展,行业规模迅速扩大,在2020年,中国的快递年总业务量已超过了800亿。
面对物流行业业务量的快速增长,对快递的分拣效率要求也在不断的提高。
目前许多的物流公司也都采用了许多不同的分拣机器。
在科技的发展中,机器人能够有效的提高劳动生产率、产品质量、生产效率与降低生产成本等方面都有着重要的作用和意义。
随着现代计算机网络技术的发展和信息社会技术时代的进步,智能工业机器人的物流技术研究和其应用逐渐成为社会广泛关注的热点,并且在经济社会的各个领域中广泛使用[1][1]。
智能分拣机器的出现,在物流行业中的中转中心环节能够大大的减少人力负担,并且提升分拣效率,降低分拣的容错率。
2 系统总体设计方案图1系统总体设计方案/系统结构图2.1 系统硬件结构1.硬件系统搭建本系统的硬件平台如下图所示:图2硬件平台图系统整体设计以STM32作为核心,包括各种传感器模块,电源模块,电机模块,机械臂,设计一个分拣智能机器人。
机器人的行动方式采用了智能小车作为运输承载作用的方案,使用灰度条循迹传感器进行路线的识别及规划,输出PWM给L298N驱动板来控制电机,使用比较基础的颜色传感器TCS230进行颜色识别,对比数据,针对物品的颜色进行分类,其中分拣的颜色为RGB(红绿蓝)三种颜色。
当颜色传感器检测到物品颜色后,系统能够根据检测到的物品颜色控制机器人将物品进行特定区域的分拣,完成机器人智能分拣任务。
基于51单片机快递自动分拣控制系统的设计

基于51单片机快递自动分拣控制系统的设计
摘要:
近年来,随着快递业务的不断发展,快递自动分拣技术也在逐步完善。
本文设计了一种基于51单片机的快递自动分拣控制系统,该系统通过光电传感器、马达和蜂鸣器等模块实现了自动分类和分拣的功能。
首先,该系统通过光电传感器实现了快递箱的检测功能,当快递箱通过光电传感器时,系统能够识别快递箱的类型和编号。
接着,通过编码器和电机的组合,实现了快递箱的定位和分拣的功能。
最后,该系统通过蜂鸣器和LED灯等模块,实现了自动提示和报警功能。
实验结果表明,该系统能够高效、准确地完成相应的分拣任务,达到了预期的效果。
本文的设计对于快递自动分拣领域有一定的参考价值,对于提高快递分拣效率和自动化程度具有重要的意义。
基于单片机控制的质量分拣装置设计
基于单片机控制的质量分拣装置设计在自动化生产线的各个环节中,分拣装置是其中的一个重要环节。
最早的分拣装置为人工分拣装置,因劳动强度大、错误率高、生产效率低、工作环境恶劣等原因早被淘汰。
生产效率对企业来说是一项极重要的指标,只有高的生产效率,企业才可以拥有旺盛的生命力[1],此时自动分拣装置便应运而生。
自动分拣装置具有多种优点,加入了闭环控制算法,是传统的分拣装置不能代替的,所以其应用也变得越来越广泛。
1总体方案设计传送带上的产品有两个质量区间:大于或小于某个设置的质量数值,即误差在一定的范围内才符合要求,对于橡胶厂胶条要在30kg+5g 这个数值范围内。
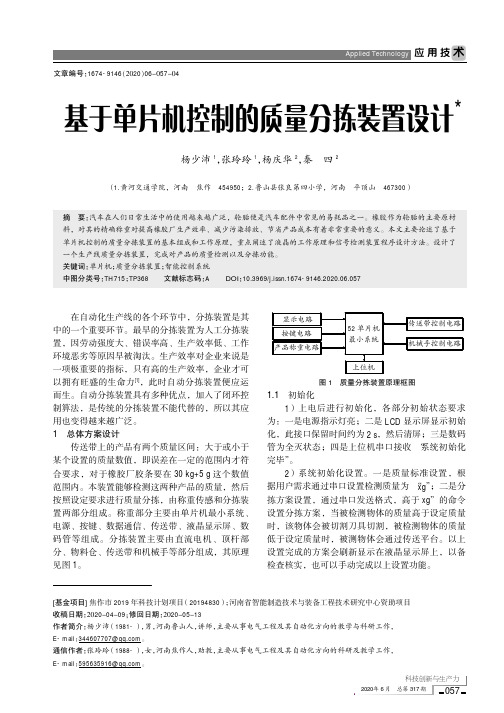
本装置能够检测这两种产品的质量,然后按照设定要求进行质量分拣,由称重传感和分拣装置两部分组成。
称重部分主要由单片机最小系统、电源、按键、数据通信、传送带、液晶显示屏、数码管等组成。
分拣装置主要由直流电机、顶杆部分、物料仓、传送带和机械手等部分组成,其原理见图1。
1.1初始化1)上电后进行初始化,各部分初始状态要求为:一是电源指示灯亮;二是LCD 显示屏显示初始化,此接口保留时间约为2s ,然后清屏;三是数码管为全灭状态;四是上位机串口接收“系统初始化完毕”。
2)系统初始化设置。
一是质量标准设置,根据用户需求通过串口设置检测质量为“x g ”;二是分拣方案设置,通过串口发送格式,高于x g ”的命令设置分拣方案,当被检测物体的质量高于设定质量时,该物体会被切割刀具切割,被检测物体的质量低于设定质量时,被测物体会通过传送平台。
以上设置完成的方案会刷新显示在液晶显示屏上,以备检查核实,也可以手动完成以上设置功能。
文章编号:1674-9146(2020)0657-04杨少沛1,张玲玲1,杨庆华2,秦四2[基金项目]焦作市2019年科技计划项目(20194830);河南省智能制造技术与装备工程技术研究中心资助项目收稿日期:2020-04-09;修回日期:2020-05-13作者简介:杨少沛(1981-),男,河南鲁山人,讲师,主要从事电气工程及其自动化方向的教学与科研工作,E-mail :****************。
基于单片机的水果分拣机器人设计

2019年第4期1研究现状目前国内外关于水果分拣的分拣方式有:人工分拣、机械分拣、气吹式分拣和基于传感器分拣等。
其中人工分拣为最传统的分拣方式,劳动强度大、分拣效率低,需要投入大量的人力和物力;机械分拣采用具有分拣效果的孔洞筛板来实现分拣的目的,极易造成水果破损;气吹式分拣利用高压气体将不满足条件的水果吹开,需要及时保持气压,耗能大,且机器体积偏大;基于传感器分拣是利用传感器识别和追踪目标,通过机械抓手进行分拣,它是当今分拣技术的主要发展方向。
当今的前沿技术发展到利用神经网络和图像识别来完成,但往往价格高昂,操作和调试工作复杂。
显然这些方法并不适用于中小型企业。
本文将介绍通过使用成本相对较低的硬件和软件系统,设计出一种精准、高效,同时易操作的水果分拣机器人的设计方案。
2方案设计水果分拣机器人主要包括控制系统、驱动模块、传感器模块和机械手。
整体控制通过单片机完成,循迹和识别水果由传感器模块完成,机器人的运动和抓取过程的动力由驱动模块完成。
整体结构框架图如图1所示。
图1系统整体结构框架图3设计原理3.1单片机系统单片机系统是实现本次设计的核心,本次设计使用STC12C5A60S2型单片机作为控制核心。
单片机可以对传感器模块输入的信号进行分析控制,完成避障和循迹的移动过程和对物体的识别过程。
单片机还可以控制电机和舵机驱动电路,分别完成行驶的过程和机械臂的抓取过程,并使各个过程按照我们事先设想的顺序进行,完成对物体的整个分拣操作。
单片机是联系所有模块的枢纽和控制中心。
系统电路图如图2所示。
图2系统电路图39、38、37脚分别连接三个红外线传感器,起识别作用。
38、37脚连接的传感器放在机器人一侧,用于识别水果的大小和位置。
37脚连接的传感器放在机器人另一侧用于识别运动终点位置,到达该位置后自动完成水果卸载工作。
21、22、23、24脚分别连接三个红外线传感器,起避障作用。
安放在机器人前部,依次排开,使其能循迹运动。
分拣机器人单片机控制系统设计说明

学校代码: 10128学号: 010202064(本科毕业设计说明书题目:分拣机器人单片机控制系统设计学生姓名:学院:系别:专业:班级:指导教师:二〇一七年五月摘要一般的分拣机器人由于其操作方式较复杂,分拣的效率较差,人机交互系统的不太完善,机械性能欠佳等已经很难满足当今社会的生产实践需要。
伴随着社会的飞速发展,人们对性能优良智能分拣人的需求也与日俱增。
设计一款基于单片机的分拣机器人有很大的实践需要和社会功能。
根据控制系统的要求,决定采用美国INTEL公司MCS-51系列单片机基本产品89C52,作为分拣机器人的主控制芯片。
它具有运行速度快,功耗低,抗干扰能力强等优点,能够完全我的设计要求。
本系统包括硬件和软件两个部分。
硬件系统主要包括电压转换电路的设计、单片机连接PC机串口电路的设计,单片机系统的设计,驱动电路的设计,显示电路的设计等。
在电路图板上完成各模块的设计与连接。
分析易得,此系统可以完全满足设计需要。
通过光耦等器件克服电机驱动部分与单片机部分的相互干扰。
关键词:单片机;硬件设计;软件编程;89C52AbstractThe general sorting robot is more complicated due to its operation,sorting is less efficient,human-computer interaction system is not perfect,poor mechanical performance has been difficult to meet the needs of today's social production practice. Accompanied by the rapid development of society,the demand for smart sorters is also growing。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的自动分拣机控制系统设
计
华东交通大学理工学院
Institute of Technology.
East China Jiaotong University
毕业设计
Graduation Design
(—)
题目基于单片机的自动分拣机控制系统设计
分院:机电工程分院
专业:机械电子工程
班级:机电 -3
学号:
学生姓名:徐刚
指导教师:蒋英钰
起讫日期: .11- .5
华东交通大学理工学院
毕业设计原创性申明
本人郑重申明:所呈交的毕业设计是本人在导师指导下独立进行的研究工作所取得的研究成果。
设计中引用她人的文献、数据、图件、资料,均已在设计中特别加以标注引用,除此之外,本设计不含任何其它个人或集体已经发表或撰写的成果作品。
对本文的研究作出重要贡献的个人和集体,均已在文中以明确方式表明。
本人完全意识到本申明的法律后果由本人承担。
毕业设计作者签名:日期:年月日
毕业设计版权使用授权书
本毕业设计作者完全了解学院有关保留、使用毕业设计的规定,同意学校保留并向国家有关部门或机构送交设计的复印件和电子版,允许设计被查阅和借阅。
本人授权华东交通大学理工学院能够将本设计的全部或部分内容编入有关数据库进行检索,能够采用影印、缩印或扫描等复制手段保存和汇编毕业设计。
(保密的毕业设计在解密后适用本授权书)
毕业设计作者签名:指导教师签名:
签字日期:年月日签字日期:年月日
摘要
近年来,随着中国经济的发展和社会的进步,邮政事业得到了空前发展。
邮政通信网的技术含量不断增加,技术装备水平也在不断的提高,邮件处理已基本实现机械化,而且朝着自动化的方向迈进。
本文着眼于中国当前邮政事业的发展,设计了基于单片机控制的邮件自动分拣机控制系统。
该系统是在传统的胶带输送机和现有的自动分拣技术的基础上,利用先进的条形码识别技术,结合步进电机、接近开关和单片机进行控制的自动化分拣系统。
该分拣系统快速、灵活、准确,操作简单方便。
提高了邮件分拣效率及精准率、降低工人劳动强度、缩短在此方面与国外发达国家的距离。
在设计过程中运用到了机械设计、单片机控制、接口技术等方面的理论。
关键词:自动分拣;单片机;接近开关;步进电机
Abstract
In recent years, with China's economic development and social progress, obtained the unprecedented development of the postal business. Growing technical content of postal communication network, the technical equipment level is also in constant increase, mail processing has basically realize mechanization, and moving in the direction of automation. This paper focus on the development of career of our country current postal, design the parcel sorting machine control system based on single chip microcomputer control. The system is in the traditional belt conveyor, and on the basis of the existing automatic sorting technology, using advanced bar code recognition technology, combined with the stepping motor, Proximity Switches and single chip microcomputer to control the automated sorting system. The rapid sorting system, flexible, accurate, easy and convenient operation. To improve the sorting efficiency and accurate rate, reduce the labor intensity of workers,。