现代信号处理讲义讲义
现代信号处理--清华胡广书讲义-第6章滤波器组基础
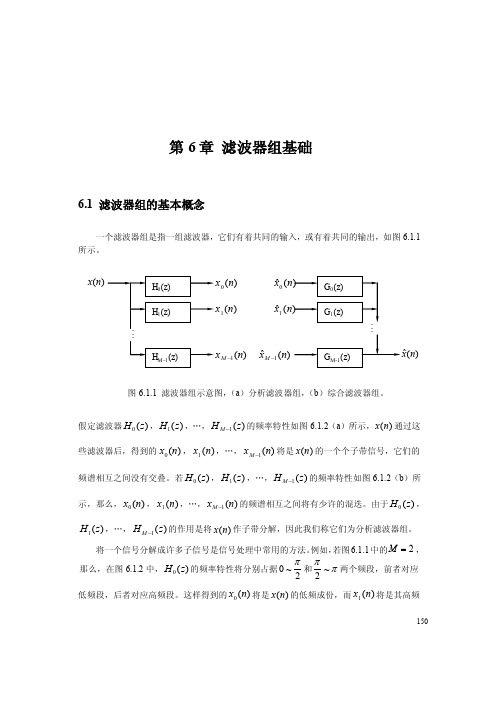
150第6章 滤波器组基础6.1 滤波器组的基本概念一个滤波器组是指一组滤波器,它们有着共同的输入,或有着共同的输出,如图6.1.1所示。
图6.1.1 滤波器组示意图,(a )分析滤波器组,(b )综合滤波器组。
假定滤波器)(0z H ,)(1z H ,…,)(1z H M -的频率特性如图6.1.2(a )所示,)(n x 通过这些滤波器后,得到的)(0n x ,)(1n x ,…,)(1n x M -将是)(n x 的一个个子带信号,它们的频谱相互之间没有交叠。
若)(0z H ,)(1z H ,…,)(1z H M -的频率特性如图6.1.2(b )所示,那么,)(0n x ,)(1n x ,…,)(1n x M -的频谱相互之间将有少许的混迭。
由于)(0z H ,)(1z H ,…,)(1z H M -的作用是将)(n x 作子带分解,因此我们称它们为分析滤波器组。
将一个信号分解成许多子信号是信号处理中常用的方法。
例如,若图6.1.1中的2=M ,那么,在图6.1.2中,)(0z H 的频率特性将分别占据2~0π和ππ~2两个频段,前者对应低频段,后者对应高频段。
这样得到的)(0n x 将是)(n x 的低频成份,而)(1n x 将是其高频)(0n x )(1n x )(1n x M -)(n x(ˆ0x (ˆ1x)(ˆ1n xM -)(ˆn x151成份。
我们可依据实际工作的需要对)(0n x 和)(1n x 作出不同的处理。
例如,若我们希望对)(n x 编码,设)(n x 的抽样频率为20KHz ,若每个数据点用16bit ,那么每秒钟需要的码图6.1.2 分析滤波器组的频率响应,(a )无混迭,(b )稍有混迭流为320Kbit 。
若)(n x 是一低频信号,也即)(n x 的有效成份(或有用成份)大都集中在)(0n x 内,)(1n x 内含有很少的信号能量。
这样,我们可对)(0n x 仍用16bit ,对)(1n x 则用8bit ,甚至是4bit ,由于)(0n x 和)(1n x 的带宽分别比)(n x 减少了一倍,所以,)(0n x 和)(1n x 的抽样频率可降低一倍。
现代信号处理第4章循环平稳信号分析-讲义
4.2.1 一阶循环统计量
循环统计方法是研究信号统计量的周期结构,它直 接对时变统计量进行非线性变换得到循环统计量, 并用循环频率——时间滞后平面分布图来描述信号, 抽取信号时变统计量中的周期信息。 循环统计量的一般表达式为
C x ()kT li m T 10 Tcx(t, )kej2 td t (4.2.1)
可见均值是时间的周期函数,该信号是循环平稳信 号,因此无法直接使用时间平均估计信号的均值。
对上述循环平稳信号以T0为周期进行采样,则这样 的采样值显然满足遍历性,从而,可以用样本平均 来估计其均值
M x(t)N li m 2N 11n N Nx(tnT0)
(4.2.4)
一阶循环统计量—循环均值
可以看出式(4.2.4)是T0的周期函数,
将式(4.2.9)代入式(4.2.11)得
(4.2.11)
Rx (
)1 T0
TT 00//22N li m 2N 11nN Nx(tnT0)x*(tnT0)ej2tdt
引言
机械循环平稳信号具有以下特点:
(1) 正常无故障的机械信号一般是平稳随机信号,统计 量基本不随时间变化。
(2) 故障信号产生周期成分或调制现象,其统计量呈现 周期性变化,此时信号成为循环平稳信号。
(3) 统计量中的某些周期信息反映机械故障的发生。
因此研究循环平稳信号处理和特征信息的提取方法, 对机械故障诊断具有重要的意义。
精品
现代信号处理第4 章循环平稳信号分 析
第四章 循环平稳信号分析
4.1 循环平稳信号的定义 4.2 信号的循环统计量 4.3 基于二阶循环统计量的仿真信号解调分析 4.4 循环平稳信号处理的工程应用
引言
在信号处理中,信号的统计量起着极其重要的作用, 最常用的统计量有均值(一阶统计量)、相关函数 与功率谱密度函数(二阶统计量),此外还有三阶、 四阶等高阶统计量。 在非平稳信号中有一个重要的子类,它们的统计量 随时间按周期或多周期规律变化,这类信号称为循 环平稳信号。 具有季节性规律变化的自然界信号都是典型的循环 平稳信号,例如水文数据、气象数据、海洋信号等。 雷达系统回波也是典型的循环平稳信号。
清华大学《现代信号处理》课件

现代信号处理(离散随机信号处理)电子工程系本课程要讨论的主要问题:(1)对信号特性的了解随机信号(随机过程,时间序列––随机过程的一个实现)信号模型→参数估计→现代谱估计:参数化谱估计讨论信号模型及模型参数的估计问题,比较参数谱估计方法和周期图方法的优劣。
(2)对统计意义下最优滤波器设计的研究平稳条件下:Wiener滤波器理论非平稳条件下:Kalman滤波理论上的目标,实际算法可达到的最佳结果(3)对环境的自适应,具备“学习能力”的滤波算法自适应均衡、波束形成、线性自适应滤波器(4)更多信息的利用,挖掘(针对非高斯问题)线性系统、功率谱:二阶矩,高斯过程的完全刻划非线性、多谱:高阶量,循环平稳(5)对时间(空间)–––频率关系的适应性:全局特性与局域特性,小波变换,时频分析信号处理算法设计面向的几个主要因素n信噪比n先验知识n雷达n通信系统n电子对抗n对先验知识的利用:统计基础上的假设、学习过程n算法复杂性与性能要求的匹配性一些进展中的课题盲自适应信号处理序列贝叶斯估计、粒子滤波阵列信号处理等等与信号处理紧密关联的学科人工神经网络统计学习理论模式识别等等教材n张旭东,陆明泉:离散随机信号处理,2005年10月,清华大学出版社主要参考书①S. Haykin, Adaptive Filter theory, Third Edition, Prentice-Hall, 1996,//Fouth Edition 2001 (电子工业出版社均有影印本)①S.M. Kay, Modern Spectral Estimation: Theory & Application,Prentice-Hall, 1988①S.M. Kay, Fundamentals of Statistical Signal Processing: Estimation Theory, Prentice Hall PTR, 1993.①S. Mallat, A Wavelet Tour of Signal Processing, Academic press, 1998,Second Edition 1999①扬福生, 小波变换的工程分析与应用, 科学出版社, 2000.① D. G. Manolakis, et,al. Statistical and Adaptive Signal Processing, Mcgraw-Hall, 2000.①J. G. Proakis, et al. Algorithms for Statistical Signal Processing, Prentice hall, 2002①张贤达现代信号处理第2版清华大学出版社课程成绩n平时作业10%n2个Matlab作业40%(布置后2周内提交)n期末开卷考试50%1.1随机信号基础被噪声干扰的初相位是随机值的正弦波信号本质上均是随机的,但将信号作为随机信号处理,还是做为确定信号处理,与我们的应用目标和我们的先验知识有关,一般地,我们总是选择对应用有利的处理方式。
Kalman滤波__LMS算法__RLS算法_清华大学《现代信号处理》讲义

线性状态模型、高斯噪声 v1 (n), v 2 (n)
Kalman 滤波问题 (一步预报 : 一步预报): 一步预报
无噪声的估计值: 已知含噪数据 y (1),L , y (n) ,求 y (i ) 无噪声的估计值
ˆ ⑴ i = n (滤波 ):已知 y (1),L , y ( n ),求 y ( n ) ˆ ⑵ i < n (平滑 ):已知 y (1),L , y ( n ),求 y (i ), i < n ˆ ⑶ i > n (预测):已知 y (1), L , y ( n ),求 y (i ), i > n ˆ 一步预测:已知 y (1),L , y ( n ),求 y ( n+1) ˆ 数学符号: y 1 ( n + 1) = y ( n + 1 | y (1),L , y ( n ) )
要求不同时间的输入信号向量 u ( n ) 线性 独立 [因为瞬时梯度向量为 e* ( n )u ( n )]。
LMS 算法的均值收敛 µ ( n )的选择 LMS 算法的均方收敛
E {e( n )} = 0
均值收敛: 均值收敛:
E {w ( n )} = w opt = R −1r
均方收敛: 均方收敛: E w ( n ) − w opt
k (1, 0) = E { x 2 ( n )} = E { x 2 (1)} = P0
依次可以递推出 g (1), k (2,1); g (2), k (3, 2);L
4.4 LMS自适应算法 LMS自适应算法
LMS: Least Mean Squares
随机优化问题 Wiener 滤波器 滤波器: 最陡下降法
新息方法: 新息方法: 新息 (innovation)
最新现代信号处理第1章ppt课件

信号处理的本质是信息的变换和提取。
信息的提取就要借助各种信号获取方法以及信号处理 技术。
信号测量系统和信号处理的工作内容的成本已达到装 备系统总成本的50%-70%。
1.1 现代信号处理的内容和意义
信号处理技术的应用领域:
电子通讯; 机械振动信号的分析与处理; 自动测量与控制工程领域; 语音分析、图像处理与声纳探测; 生物医学工程。
(1.4.4)
R x(y ) x ( t)y ( t)d t x ( t)y ( ,t)
(1.4.5)
内积可视为 x (t与) “基函数”关系紧密度或相似性的一种度量。
1.4 信号处理的内积与基函数
信号的内积与基函数
傅里叶变换是应用最为广泛的信号处理方法,函数 x (t ) 的傅里叶变换为
cn
1 T
T/2 x(t)eintdt
T/ 2
(1.3.6)
1.3 非平稳信号处理和信号的正交分解
1.3.2 信号的正交分解
傅里叶级数具有两个独特的性质:
1、函数 x (t ) 可分解为无限多个互相正交的分量 gn(t):cneint 的和,其中正交是指 g m 与 g n 的内积对所有 mn成立, 即
gm,gn:T 1 T T //2 2gm (t)gn(t)d t0
mn
2、正交分量 或 可用一个简单的基函数
的整数m
或n的膨胀g生m 成,g 线n 性累加逼近任何函数 g1(。t)
x(t) 小波变换中,通过母小波的伸缩和平移生成小波族。
1.3 非平稳信号处理和信号的正交分解
1.3.2 信号的正交分解
第一章 绪论
1.1 现代信号处理的内容和意义 1.2 信号的分类 1.3 非平稳信号处理和信号的正交分解 1.4 信号处理的内积与基函数 1.5 现代信号处理的应用现状与进展
chapter04 清华大学《现代信号处理》讲义-胡广书

1.幅度是中心在(0,0)的高斯信号; 2.在 θ , τ 两个方向上是振荡的,振荡频率 由 Ω 0 , t0 决定 ;注意,Ω 0 , t0 并不影响
AF的中心位置; 3. AF是复函数。
例2
α 2 x(t ) = ∑ exp − α (t − t i ) 2 + jΩ i t i =1 π
结论:Cohen 类的任一成员都可由Wigner分布 得到。
(5)用广义模糊函数表示
M x (θ,τ ) = Ax (θ,τ )g(θ,τ )
Cx (t,Ω) = ∫∫ M x (θ,τ )e
− j (θt +Ωτ )
dτdθ
(6)用广义时间相关表示
− jtθ ′ 定义: g ( t,τ ) = ∫ g (θ,τ ) e dθ
上一例已求出,中心在 (θ , τ ) = (0, 0) 处;
互项:
1 2 α 2 1 Ax1 ,x2 (θ,τ ) = exp − (θ −Ωd ) + (τ − td ) exp j ( Ωuτ +θ tu +Ωd tu 2π 4 4α
1 2 α 2 1 Ax1 ,x2 (θ,τ ) = exp − (θ −Ωd ) + (τ − td ) exp j ( Ωuτ +θ tu +Ωd tu ) 2π 4 4α
Wx ( t,Ω ) = ∫ rx (t , τ )e − jΩτ dτ
WVD定义为瞬时自相关对 时间延迟 的傅里叶正变换
τ
rx ( t,τ ) = ∫ Ax (θ ,τ ) e − jθ t dθ
Wx ( t,Ω ) = ∫ rx (t , τ )e − jΩτ dτ = ∫∫ Ax (θ ,τ ) e
MUSIC方法_清华大学《现代信号处理》讲义_-张贤达

改进方法1: (求根MUSIC方法)
基本思想:Pisarenko谐波分解 (不需一维搜索)
a H ( )G 0
j
或
j ( m 1)
G H a( ) 0
T
a( ) 1, e , , e
z e j
p( z ) 1, z, , z
m 1 T
波束形成器:
w opt
1 H R xx a (d ) 1 H a(d )R xx a (d )
5. 改进的MUSIC方法
改进方法1:
ˆ ( ) a H ( )Ua P( ) H a ( )GG H a( )
p
ˆ 2 U
i 1
2 i
i
H s s 2 k k
观测空间 = 信号子空间 + 噪声子空间
特征值分解后,与大特征值对 应 与小特征值对 应
子空间的几何意义:
U S, G
H H H S S S S G H U U H S, G H I H G S G G G
S S I p , GH G Im p , G H S 0 S H G 0
Vandermonde矩 阵
j p e j ( m 1) p e 1
方向矩阵
满列秩 1 2 p
1 j1 e j ( m 1)1 e
1 e j2 e j ( m 1)2
2
加性噪声
2
1 lim N N
2
n 1
N
z (n) w H E x(n)x H (n) w
2
现代信号处理 - 第13讲

42 15
3 、卷积同态系统
信号和噪声的关系除相加、相乘外,可以为卷积:
语音信号是声带源和声道冲激响应的卷积 地震波是地震源波形和地壳冲激响应的卷积
处理这类信号,使用卷积同态系统 卷积同态系统:输入、输出矢量空间中矢量间的运 算是卷积运算( 、为卷积运算)
x(n) *
++ ++ * L[] T* [] T*-1[] x(n) y(n)
三个子系统都是同态系统 第一个系统T []称为运算 的特征系统 -1 第三个系统 TO []称为运算O的特征系统的逆系统 第二个系统 L[]则为线性系统
42 6
三个子系统均满足广义的线性叠加原理 T 1(n) 2(n)]=T 1(n)]+T 2(n)] [x x [x [x T [cx(n)]=cT [x(n)] ˆ ˆ ˆ ˆ L[ x1 (n) x2 (n)] L[ x1 (n)] L[ x2 (n)] ˆ ˆ L[cx(n)] cL[ x(n)] ˆ ˆ ˆ ˆ To-1[ y1 (n) y2 (n)] To-1[ y1 (n)]OTo-1[ y2 (n)]
42 12
如何从图像s(x,y)中提取反射图sr(x,y)? 解:可以采用乘法同态滤波系统 第一个子系统:乘法特征系统,通过对数运算得: ln[s(x,y)]=ln[si(x,y)]+ln[sr(x,y)] 即:照度图和反射图的相乘关系被转变为相加关系 由于照度图是低频的,而反射图是高频的,因此 第二个子系统:线性系统 L[]可设计成一个二维的高 通滤波器。理想情况下,第二个子系统的输出为: ln[sr(x,y)] 第三个子系统:乘法特征系统的逆系统,通过指 数运算,将ln[sr(x,y)]变为: exp{ln[sr(x,y)]}= sr(x,y) 因此达到分离反射图的目的
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
子空间:向量组 a1, ,ap 的线性组合的集合,称为 a1, ,ap 张成的空间。
p
span a1, ,a p close a1, ,a p ja j , j C
j1
信号子空间: span s1, ,sp span u1, ,up 噪声子空间: span g1, ,g p span up1, ,um
J (w) 0
w*
wopt Rxx1a(k )
又
wH opt
a(k
)
1
aH
(k
)wopt
,代入上式
aH
(k
1
)R xx1a( k
)
wopt
Rxx1a(k ) aH (k )Rxx1a(k )
最佳滤波器
由Capon提出,称为最小方差无畸变(MVDR)波束形成器
MVDR: minimum variance distortionless response
期望信号 干扰信号 加性噪声
E z(n) 2 lim 1 N z(n) 2 wH E x(n)xH (n) w
N N
n1
E sk (n) 2 wH a(k ) 2 p E si (n) 2 wH a(i ) 2 2 w 2 i 1,i k
wH a(k ) 1
(波束形成条件)
现代信号处理讲义
3.5 MUSIC方法
1. 阵列信号处理问题 2. 最优波束形成器 3. 子空间方法 4. MUSIC方法 5. 改进的MUSIC方法
3.5 MUSIC方法
MUSIC: Multiple Signal Classification 1. 阵列信号处理问题 (array signal processing)
观测空间:spanx(1), , x(N) spanu1, ,um
观测空间 = 信号子空间 + 噪声子空间
特征值分解后,与大特征值对 应
与小特征值对 应
关键:求 a(k ) k
空间谱:
P(k
)
aH
(k
1
)R xx1a( k
)
最大幅值对应的 k 即为所求。
3. 子空间方法
假设1:对于不同的 i 值,向量 a(i ) 线性独立
假设2:各阵元上复加性噪声具有零均值、相同方差, 且不相关
Ee(n) 0 E e(n)eH (n) 2I
E{e(n)eT (n)} O 令复白噪声分量ei (n) xi (n) jyi (n),则 E{ei (n)ej (n)} 0, i j E{ei2 (n)} E{xi2 (n)} E{yi2 (n)} j2E{xi (n) yi (n)}
1 e j2
e j (m1)2
1
e j p
e j(m1) p
p
信号模型 xk (n) ak (i )si (n) ek (n), k 1, , m i 1
阵元k上的观测数据
x(n) x1(n), , xm(n)T
s(n) s1(n), , sp (n)T
e(n) e1(n), , em(n)T
A() a(1), , a( p )(m p)
阵列信号处理的数学模型:
x(n) A()s(n) e(n)
N个快拍
阵列信号处理的问题:已知数据向量 x(1), , x(N) ,求空 间参数 1, , p
波达方向
2. 最优波束形成器
DOA估计:波束形成器
设计一个滤波器 w1, , wm 抽头(权系数),
m p p p pm
121
特征值分解:
UH R xxU Σ
UH APAH U 2I Σ
2 pp 0
2I
0
R xx 的特征值:
i
2 ii
2
,
2,
i 1, , p i p 1, , m
若
2 ii
2 ,区分大和小的特征值
U S G [u1, , u p | u p1, , um ]
1
N
N n1
z(n) 2
1 N
N n1
wH x(n) 2
wH
1 N
N
x(n)xH(n) Nhomakorabeaw
n1
则
min
1 N
N n1
z(n) 2
min wH Rˆ xxw
其中
Rˆ xx
1 N
N
x(n)xH (n)
n1
lim min
N
1 N
N n 1
z(n) 2
min wH R xxw
P
x(n) A( )s(n) e(n) a(k )sk (n) a(i )si (n) e(n) i 1,i k
0 (实部和虚部不相关,具有相同方差)
假设3:P Es(n)sH (n) 满秩矩阵(非奇异)
Rxx E x(n)xH (n)
E A()s(n) e(n)A()s(n) e(n)H
A()E s(n)sH (n) AH () E e(n)eH (n)
APAH 2I
阵列:多个天线的组合 每个天线——阵元:天线、传感器
假设:⑴窄带信号 si (n) :点信源 ⑵远场(far field):波前——平面波
波达方向 i (DOA: direction of arrival):入射线与法线 之间的夹角,可以有正有负
——波长
i
2
d
sini
d 2 (半波长条件):若不满足该条件,会出现DOA估
计的模糊
si (n)
si (n)e ji
p个信号
si (n)e j(m1)i
信号 si (n)的方向向量,(阵列响应)向量:
a(i ) 1, e ji ,
,e
j (m1)i
T
A() a(1), , a( p )
Vandermonde矩 阵
方向矩阵 满列秩
1 2 p
1
e j1
e j(m1)1
w
H
a(i
)
0,
ik
(干扰拒绝条件,零点形成条件)
则 E z(n) 2 E sk (n) 2 2 w 2
在 wH a(k ) 1 约束条件下,使 E z(n) 2 min
Largange乘子法:
J (w) E z(n) 2 1 wHa(k ) 其中 E z(n) 2 wH Rxxw
m
z(n) wi*xi (n) i 1
加权求和
输出信号 z(n) 只包含 xd (n) —— 期望信号 拒绝其他信号 —— 干扰信号
最小输出能量(MOE: minimum output energy)准则:
1 N z(n) 2
N n1
min
m
z(n) wH x(n) w, x(n) wi*xi (n) i 1