SEW-MDX61B-DBG60B操作面板调试步骤
SEW-MDX61B-同步伺服系统调试方法和步骤-转摆伺服-带绝对值编码器A..H

_SetSys( SS_POSSPEED,CreepSpeed )
_SetSys( SS_POSSPEED,RapidSpeed )
//Declaration of Variables: long Pointer, Position, CurrentPosition ;
//Declaration of structures: SSPOSSPEED CreepSpeed, RapidSpeed;
4
923 → 设为所需值;(位置运行曲线跟踪窗口,默认值 5000)
:使用 MOTION STUDIO 软件,输入驱动器内位控程序(详见 PPT)
/*============================================= IPOS Source File
===============================================*/ #include <constb.h> #include <iob.h> #pragma globals 350 399
/*============================================= Main Function (IPOS Entry Function)
#define #define #define #define
in_Position InputImage SlowRunning FastRunning
(StatusWord & 0x80000)
//Mask out bit 19 of the status word
((InpLevelB >> 5)& 0x00000003) //Scanning DI05-DI06
SEW-MDX61B-异步电机系统调试方法和步骤-总线速度控制-Profinet IO-不带编码器

②Profinet IO网卡:DFE32B ③异步电机…DRE(N)(S)12系统架构:DRE(N)(S)...异步电机L1L2L3PE1. 水平驱动2. 升降驱动硬件接线:水平驱动34驱动器输出U,V,W 必须与伺服电机的U,V,W 严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆制动整流块2,3端为输入,输入电压见电机铭牌左下脚;PLCDRE(N)(S)异步电机硬件接线:升降驱动!! (建议:制动器采用快速制动;PLC 保护制动)(防止溜车,及意外坠落)5驱动器输出U,V,W 必须与伺服电机的U,V,W 严格一一对应驱动器输出动力电缆请用专用的屏蔽线缆制动整流块2,3端为输入,输入电压见电机铭牌左下脚;请将出厂时接在制动整流块5脚上的蓝色线调到4脚PLCDRE(N)(S)异步电机将网卡的Def IP开关设置到“0”的位置,用PLC设置相应的IP地址如果Def IP开关在“1”的位置,用PLC设置好的IP地址,在断电后,又重新上电时,会恢复成默认地址192.168.10.4/CONTROL.INHIBIT端子功能:6在对伺服系统作初始化配置,以及对一些重要的结构功能性参数进行设置时,必须将/CONTROL.INHIBIT端子置为0,而系统运行前,需将/CONTROL.INHIBIT端子置为1,在此端子由1变为0时,伺服控制器将立即停止所有输出,电机马上处于无控制状态,系统按其惯性自由停车,因此不能用此端子进行正常的快速停止功能。
ENABLE/RAP.STOP端子功能:当ENABLE/RAP.STOP端子置为1时,电机即进入接受总线指令状态;当ENABLE/RAP.STOP端子置为0时,电机处于无控制状态;在电机运行时,将ENABLE/RAP.STOP端子置为0,电机会按参数136设定的值快速停下来,然后处于无控制状态;:使用MOTION STUDIO软件配置电机详见PPT:使用MOTION STUDIOS软件-手动操作模拟器直接驱动电机运行,以检测电机接线,编码器接线,电机特性配置是否良好详见PPT:使用MOTION STUDIO软件设定参数100→设为Fieldbus;(总线控制)101→设为Fieldbus;(总线控制)130→设为所需值;(速度控制时CW顺时针运行加速斜坡时间);131 →设为所需值;(速度控制时CW顺时针运行减速斜坡时间)132 →设为所需值;(速度控制时CCW逆时针运行加速斜坡时间)133 →设为所需值;(速度控制时CCW逆时针运行减速斜坡时间)136→设为所需值;(当ENABLE/RAP.STOP端子由1变为0时,电机的停转时间)301 →设为60rpm;(输出最小转速)(保证全力矩转速!防止升降驱动坠落);302 →设为所需值;(输出最大转速);303 →设为所需值;(输出最大电流限幅);500 →设为MOT. & REGEN.MODE;(电机过载保护功能打开);501 →设为所需值;(电机过载,达到参数303设定值后,多长时间才停机报警);600 →设为Enable/stop;(输出使能)601 →设为No function;602 →设为No function;603 →设为No function;604 →设为No function;700 →设为VFC;(矢量速度控制模式)7731 →制动器释放时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,起动时防溜车时间)732 →制动器应用时间,水平驱动时:设为0.1s升降驱动时:设为0.25s(升降控制时,停止时防溜车时间)831 →设为Rapid stop/fault(总线故障时立即停止输出,持续报警,等待复位信号) 870 →设为Control word 1;(总线PO1定义,控制启动,停止)871 →设为Setpoint speed;(总线PO2定义,发送运行的速度)872 →设为Ramp;(总线PO3定义,发送运行的加减速斜坡)873 →设为Status word 1;(总线PI1定义,反馈驱动器状态;报警信息)874 →设为Actual speed;(总线PI2定义,反馈当前运行的速度)875 →设为Output current;(总线PI3定义,反馈当前运行的电流)876 →设为Yes;(允许总线数据传输)PLC设定至变频器值PO1 : Control word 1 (控制字1)当需要控制电机转动时,需将第1位,第2位都置为1;即PO1发6需要停止电机转动时:如只将第1位置为0,将按136参数设定的减速斜率停止;即PO1发4如只将第2位置为0,将按131;133参数设定的减速斜率(如果PO3定义为无功能)或PO3设定的减速斜率停止(如果PO3定义为加减速斜坡功能);即PO1发2如将第1位,第2位都置为0,将按136参数设定的减速斜率停止;即PO1发0当需要故障复位时,将第6位置为1即可;8如PO1对应QW256,直接赋值到QW256即可PO2 : Setpoint speed (设定速度)速度设定比例为1:5,如需电机按1000rpm正转运行,需按5000进行设定;即PO2发5000如需电机按1000rpm反转运行,需按-5000进行设定;即PO2发-5000如PO2对应QW258,直接赋值到QW258即可PO3: Ramp (加减速斜坡)加减速斜坡设定比例为1:1ms,如需电机按2s加速或减速运行,需按2000进行设定;即PO3发2000这个斜坡值是指0-3000rpm的加速时间,如果实际需求速度为1000rpm,斜坡设定值为2000,则电机从0rpm到达1000rpm只需2s * (1000rpm / 3000rpm) = 0.67s如PO3对应QW260,直接赋值到QW260即可9变频器反馈至PLC值PI1 : Status word 1 (状态字1)当第5位为1时,表示变频器有报警;高8位(8-15位)的整型数值为报警代码(代码含义请看SEW_MDX61B 驱动控制器系统手册英文版Edition2010.8第620-636页)当第5位为0时,表示变频器没有报警;高8位(8-15位)的整型数值为变频器运行状态代码(代码含义SEW_MDX61B 驱动控制器系统手册英文版Edition2010.8第609页)如PI1对应IW256,驱动系统的相应状态,直接从IW256读值即可PI2 : Actual speed (实际速度)10速度设定比例为1:5,如读取值为5000,需按5000rpm / 5换算,则实际转速为1000 rpm如读取值为-5000,需按-5000rpm / 5换算,则实际转速为-1000 rpm 如PI2对应IW258,电机运行的速度,直接从IW258读值即可PI3 : Output current (输出电流)从PI反馈回来的值为变频器额定输出电流的百分比,电机实际运行电流需根据所使用的变频器进行换算如PI3对应IW260,电机运行的电流,直接从IW260读值即可示例:一个MDX61B0040-5A3-4-00(4KW)控制一个3KW的电机PI反馈给PLC的值为01C2(16进制),换算为10进制为450从驱动器系统手册可查出MDX61B0040-5A3-4-00的额定输出电流为9.5A则电机实际运行的电流为9.5A * 450/1000 = 4.3A11电磁干扰屏蔽安装要求控制器至电机的动力电缆需采用带屏蔽层,屏蔽层从头至尾不应有断层,并用金属夹可靠紧固,大面积接地编码器线需采用专用带屏蔽层双绞线,并用金属夹将屏蔽层可靠紧固接地,屏蔽层从头至尾不应有断层。
SEW MOVIDRIVE MDX61B调试步骤同步伺服(binary setpoint)

9、选择“Execute complete start-up(执行完整的初始化)”;
10、选择“Stand-alone motor > Vector-controlled/Servo(独立电机 > 矢量 控制/伺服电机)”;
11、参照电机铭牌,检查电机及编码器信息是否准确;
12、检查电机类型信息;
47、可选择“project > save(as)”,保存项目;
48、可选择“project > export”,导出项目到压缩文件;
49、若后期设备应用有更改,需初始化控制器,可在“parameter tree”P802中选择“delivery state”,将控制器还原为出厂状态。
4、定义硬件名称,点击“finish”开始硬件配置;
5、硬件配置中;
6、硬件配置完成后,去除控制器X13/DIΦΦ“控制器禁止”端子的二进 制输入,然后点击“startup”;
7、点击“perform startup”,开始初始化;
8、点击“startup set-1”,进行parameter set-1设置( 如果需要两套参数 运行,parameter set-2设置采取同样步骤);
SEW MOVIDRIVE MDX61B调试步骤
(binary setpoint)
WEISS-CHINA
2014/05
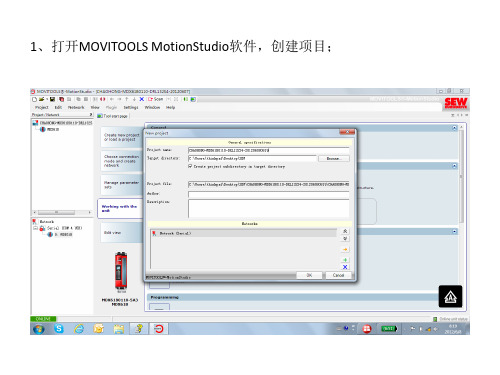
1、打开MOVITOOLS MotionStudio软件,创建项目;
2、用USB11A连接电脑和MDX61B控制器的XT插槽,扫描网络上的设备;
3、选择“configure device”,对连接到的设备进行硬件配置;
21、点击“完成”,将初始化信息下载至控制器。如需配置parameter set-2,点击“download”,再进行参数包示框,点击“确定”;
SEW MDX61B_变频器说明书(1)

选择所需语言下图显示选取所需语言时必要的按键。
1.语言选择2.向上箭头,选择上一个菜单项3.OK ,输入确认4.向下箭头,选择下一个菜单项在启动或激活 DBG60B 操作面板的数据传送状态时显示屏上会显示下列内容几秒钟:之后显示屏上会显示语言选择标识。
请按以下步骤选择所需要的语言:•按下按键“Language selection ”。
在显示屏上会出现可供选择的语言列表。
•通过按“向上箭头 / 向下箭头”键选择所需要的语言。
•按“OK ”键确认所选择的语言。
在显示屏上会出现所选语言的基本显示。
06534AXX图53:语言选择按键SEW EURODRIVE54533AXX调试下图显示进行调试所必须的按键。
1.放弃调试或中止2.菜单切换,显示模式 È 编辑模式3.向上箭头,选择上一个菜单项4.OK ,输入确认5.激活上下文菜单6.向下箭头,选择下一个菜单项调试步骤图54:调试按键1.在端子 X13:1(DIØØ“/Controller inhibit ”)处输入“0”信号,例如通过断开电子接线板 X13。
0.00rpm 0.000AmpCONTR. INHIBIT 2.PARAMETER MODE VARIABLE MODE BASIC VIEW3.“STARTUP PARAMET ”菜MANUAL MODESTARTUP PARAMET.COPY TO DBG COPY TO MDX4.••以选择“PARAMETER SET 1” 或“”。
•••STARTUP PARAMET.PREPARE FOR STARTUPC00*STARTUP PARAMETER SET 1PARAMETER SET 25.C01*OPER. MODE 16.选择电机型号。
已连接2极或4极 SEW 电机时,要从选择列表中选择正确的电机。
如要连接其它厂商的电机或者极数多于 4极的 SEW 电机,需要从选择列表“NON-SEW MOTOR ”中C02*MOTOR TYPE 1DT71D2DT71D4DT80K2C02*MOTOR TYPE 1NON-SEW MOT.DT63K4/DR63S47.根据电机的铭牌为所选连接类型输入电机额定电压。
SEW MDX61B_变频器说明书(1)
选择所需语言下图显示选取所需语言时必要的按键。
1.语言选择2.向上箭头,选择上一个菜单项3.OK ,输入确认4.向下箭头,选择下一个菜单项在启动或激活 DBG60B 操作面板的数据传送状态时显示屏上会显示下列内容几秒钟:之后显示屏上会显示语言选择标识。
请按以下步骤选择所需要的语言:•按下按键“Language selection ”。
在显示屏上会出现可供选择的语言列表。
•通过按“向上箭头 / 向下箭头”键选择所需要的语言。
•按“OK ”键确认所选择的语言。
在显示屏上会出现所选语言的基本显示。
06534AXX图53:语言选择按键SEW EURODRIVE54533AXX调试下图显示进行调试所必须的按键。
1.放弃调试或中止2.菜单切换,显示模式 È 编辑模式3.向上箭头,选择上一个菜单项4.OK ,输入确认5.激活上下文菜单6.向下箭头,选择下一个菜单项调试步骤图54:调试按键1.在端子 X13:1(DIØØ“/Controller inhibit ”)处输入“0”信号,例如通过断开电子接线板 X13。
0.00rpm 0.000AmpCONTR. INHIBIT 2.PARAMETER MODE VARIABLE MODE BASIC VIEW3.“STARTUP PARAMET ”菜MANUAL MODESTARTUP PARAMET.COPY TO DBG COPY TO MDX4.••以选择“PARAMETER SET 1” 或“”。
•••STARTUP PARAMET.PREPARE FOR STARTUPC00*STARTUP PARAMETER SET 1PARAMETER SET 25.C01*OPER. MODE 16.选择电机型号。
已连接2极或4极 SEW 电机时,要从选择列表中选择正确的电机。
如要连接其它厂商的电机或者极数多于 4极的 SEW 电机,需要从选择列表“NON-SEW MOTOR ”中C02*MOTOR TYPE 1DT71D2DT71D4DT80K2C02*MOTOR TYPE 1NON-SEW MOT.DT63K4/DR63S47.根据电机的铭牌为所选连接类型输入电机额定电压。
SEW-MDX61B驱动器-MOTION STUDIO软件调试方法和步骤-异步电机-不带编码器

软件调试工具
➢ 1.电脑通讯盒USB11A ➢ 2. SEW - MOVITOOLS® MOTION STUDIO
软件
USB11A
MOVITOOLS® MOTION STUDIO 软件
➢ 1.电脑通讯盒USB11A 随机附带光盘 ➢ 2. SEW – 网站下载2.2G版本 https://www.seweurodrive.de/os/dud/?tab=software&country=DE &language=de_DE&search=movitools
1. 点击,进入单元工作区域
1.点击,进行电机配置
1. 选择参数组1,存 储配置参数
2. 然后点击
1.进行完整的电机配置
2. 点击
1. 选择矢量/伺服模式
2. 点击
点击
1. 选择异步电机类型
2. 点击
然后点击
选择电机型号(见电机铭牌) 输入电机额定电压(见电机铭牌) 输入电机额定频率(见电机铭牌) 输入驱动器输入电压(400VAC) 选择不带编码器 选择电机过热时的报警状态 选择电机内的测温元件类型
运行SEW控制器调试软件 (MOVITOOLS-MotionStudio)
1. 选择 2. 点击
1. 建立项目名称 2. 然后点击
点击,(进行通讯接口配置)
1. 配置通讯接口,选择Serial 2. 然后点击
1. 点击,搜索所连接驱动器
如通讯正常,可找到所连接 驱动器
2. 点击,配置驱动器所要控 制电机的相关信息
点击,进入Assembler程序功能
点击,进入程序编制
选择所需功能语句,及赋值
选择打开已编制好的程序
点击编译并下传程序
SEW MDX61B初始设置

SEW MOVIDRIVE MDX61B 初始设置1、启动MOVITOOLS;2、在“language”选择区端,选择“ENGLISH”;3、在“PC-COM”选择区端,选择变频器所连接的PC断口号;4、在“Device type”区端,选择“MOVEDRIVE B”;5、在“Baud rate”区端,选择波特率;6、按<Update>钮,显示所连接的变频器;7、在“Execute program”选择区端,按“Parameter/Diagnosis”下的<shell>钮,启动shell程序;8、在shell程序中,选择[Startup/Startup…]菜单命令;9、在“Start-up”窗口中,确定变频器和电机的型号,点下一步;10、在“Start-up type”窗口中,选择“Execute complete start-up”,点下一步;11、在“Moter-inverter configuration”窗口中,选择“Stand-alone motor /Vector-controlled/Server”,点下一步;12、在“Select Motor Type”窗口中,选择电机类型;13、在“SEW-motor type 1 CT/CV”中,选上电机的一些设置;14、在“USE Encoder”中,选择“YES”;15、在“Possilbe applications”中,选择“Positoning with IPOS”;16、在“Operating Modes”中,选择“VFC”;17、在“Speed Controller VFC”中,“Load inertia”里的数据设为“JO Motor”里数据的5倍,其它按要求设定;18、在接下的窗口中,除了变更一下通讯方式外,其余都选默认值;19、在“DOWNLOAD”时,要注意将端子X13:1(DIOO“/控制器禁止”)必须为“0”信号(将该继电器的线圈拔出);20、选择“Startup/Extended positioning via bus”点中“commissioning”在下面的窗口中设定一些必要的参数;21、在“DOWNLOAD”时,也要将端子X13:1(DIOO“/控制器禁止”)必须为“0”信号(将该继电器的线圈拔出);22、下载完成后,将继电器线圈插回;23、在“SHELL MOVITOOLS”中,选择“Manual Operation”(一个手掌标志),进行手动操作;24、手动操作中,在点正转的时候,其“Actual Position”数据应该是增加的,如果变频器动作,电机不转,可能是电机的相序有误,调整电机的相序。
SEW MOVIDRIVE MDX61B调试步骤
25、例如,P933突变时间;
26、参数配置为在线实时进行,完成后,点击“manual mode”手动模式;
20、点击“Activate manual mode”,激活手动模式;
28、连接控制器X13/DIΦΦ“控制器禁止”端子的二进制输入;
29、选择控制速度,旋转方向,点击“start”或“stop”进行启停控制;
10、选择“Stand-alone motor > Vector-controlled/Servo(独立电机 > 矢量 控制/伺服电机)”;
11、参照电机铭牌,检查电机及编码器信息是否准确;
12、检查电机类型信息;
13、输入电源电压,定义参数P835“电机温度传感器的响应”,定义参 数P530“电机温度传感器类型”(例如TF/TH);
30、手动模式下,转台运行正常后,点击“Deactivate manual mode”;
31、选择“是”,退出手动模式;
32、创建AMA0801模块;
33、去除控制器X13/DIΦΦ“控制器禁止”端子的二进制输入,点击 “next”,开始初始化AMA0801模块;
34、总线参数和控制器配置页面,建议使用其默认参数;
35、刻度计算页面,“Diameter/spindle pitch”的单位选择“inc”;
36、参数和极限页面,若使用硬件限位开关,需将CW和CCW限位开关分别接到 控制器X13/DI Φ 4和X13/DI Φ 5端子,同时在软件上选择“YES”,“parameter tree”中将P603和P604端子功能设置为相应的限位功能;如果没有原点传感器, 寻找参考点模式选择5,即将当前点作为原点;
21、点击“完成”,将初始化信息下载至控制器。如需配置parameter set-2,点击“download”,再进行参数包2的配置;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
㈡使用键盘盒--DBG60B
:撤销或终止启动
:改变菜单,显示模式--- 编辑模式
:向上箭头,上移至上一个菜单
:向下箭头,下移至下一个菜单
:OK,确认输入
:激活上下文相应菜单
:语言选择
变频器上电后,显示0.00 rpm
0.00 Amp
CONTR. INHIBIT
①如果显示不为英语,按键,可切换到英语显示
②按键,激活菜单;按键或键,到STARTUP PARAMET(电机配置菜单),
1
③按键,显示C00 * STARTUP
PARAMETER SET 1 (请选择参数组1)
④按键,显示C22 * MOTORS
SINGLE MOTOR (请选择单电机驱动)
⑤按键,显示C26 * OPER. MODE
VFC (请选择矢量控制模式)
⑥按键,显示C29 * ENCODER
NO
⑦按键,显示C36 * OPER. MODE
SPEED CONTROL (请选择速度控制模式)
⑧按键,显示C02 * MOTOR TYPE1
DV132S4 (请根据电机铭牌选择相应型号)
⑨按键,显示C03 * MOT.RATED.VOLT.1 V
400.00 (电机额定电压)
⑩按键,显示C04 * MOT.RATED.FREQ.1 Hz
50.00 (电机额定频率)
⑾按键,显示C05 * MAINS.RAT.VOLT V
400.00 (变频器入线电压)
⑿按键,显示835 * RESP.TF—SIG V
NO RESPONSE(热敏电阻监控无效)
⒀按键,显示C06 * CALCULATION
YES(对上述设定参数进行矢量建模运算)
⒁显示C08 * SAVE
YES(保存建模运算后的值)
⒂按键,显示STARTUP PARAMET(电机配置菜单)
⒃按键或键,到BASIC VIEW(初始化界面),
按键,显示0.00 rpm
0.00 Amp
CONTR. INHIBIT
电机配置完成。
要设定所需的运行参数,按键或键,即可进入相应的参数号进行设定。
2。