槽轮机构运动仿真教程
槽轮机构运动学仿真
湖南农业大学工学院课程设计说明书课程名称:机械CAD/CAM课程设计题目名称:槽轮机构运动学仿真班级:20 11 级机制专业四班姓名:学号:指导教师:评定成绩:教师评语:指导老师签名:20 年月日目录摘要 (1)关键词 (1)1 槽轮机构的结构组成和工作原理 (1)2 零件三维实体模型建立的方法 (1)2.1 主动转盘三维实体模型建立的方法 (1)2.2 从动槽轮三维实体模型建立的方法 (3)2.3 其他零件三维实体模型建立的方法 (4)3 装配模型建立的方法和步骤 (6)4 建立装配模型的运动仿真 (9)5 装配模型的运动仿真分析 (13)6 装配模型的运动仿真分析结论 (15)7 装配模型图集 (16)7.1 总成图 (16)7.2 爆炸图 (16)7.3 零件图 (17)7.4 主动转盘工程图 (18)8 总结 (19)参考文献.......................................... (19)槽轮机构运动学仿真学生:(工学院,11-机制4班,学号)摘要:槽轮机构是将主动拨盘的连续转动转化为从动槽轮的间歇转动,以达到间歇进给、转位和分度等工作要求。
运用Pro/E软件对槽轮机构进行三维实体建模及装配,并运用模块进行运动仿真分析,得出机构的角速度、角加速度随时间变化的曲线。
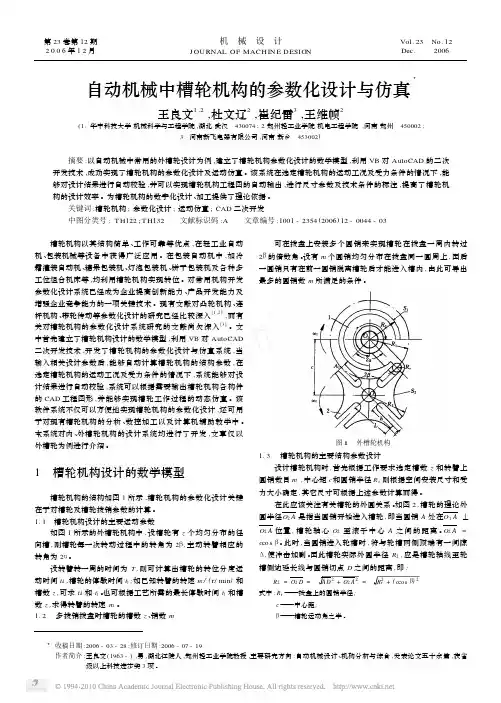
关键词:槽轮机构;间歇运动;运动仿真1、槽轮机构的结构组成和工作原理槽轮机构由槽轮和圆柱销组成的单向间歇运动机构,又称马尔他机构。
它常被用来将主动件的连续转动转换成从动件的带有停歇的单向周期性转动。
槽轮机构有外啮合和内啮合以及球面槽轮等。
外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同,球面槽轮可在两相交轴之间进行间歇传动。
槽轮机构典型结构由主动转盘、从动槽轮和机架组成。
2、零件三维实体模型建立的方法2.1、主动转盘三维实体模型建立的方法②选择模板④拉伸2.2、从动槽轮三维实体模型建立的方法②选择模板2.3、其他零件三维实体模型建立的方法3、装配模型建立的方法和步骤4、建立装配模型的运动仿真5、装配模型的运动仿真分析打开“测量”,新建测量,测量槽轮边沿上一点“PNT0”,的位置,速度,加速度以及槽轮转动的角位移,角速度,角加速度。
自动机械中槽轮机构的参数化设计与仿真
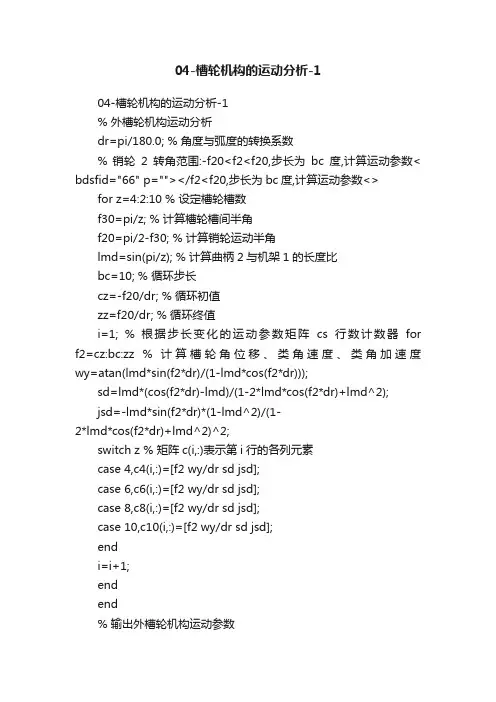
2. 4 绘制槽轮结构图形程序 通过描述槽轮机构的特征点 ,用 VB6. 0 调用 AutoCAD 绘
图命令来快速进行图形绘制 。程序关键代码如下 : ′画外槽轮廓线
Set plineobj ( 0 ) = acaddoc. ModelSpace. AddLight Weight Polyline (arr) ′创建多义线
图 6 槽轮与拨销装配及仿真计算
参考文献
[ 1 ] 徐武彬 ,尹辉俊. 基于 SOL ID ED GE 的凸轮三维设计系统的研究 [J ] . 机械设计 ,2002 ,19 (6) :33 - 35.
[ 2 ] 崔武彬 ,李健. 基于 SOL ID ED GE 的皮带轮三维设计系统的研究 [J ] . 机械设计 ,2003 ,20 (12) :26 - 28.
写程序代码 ,通过 ActiveX Automation 技术 ,控制 AutoCAD 应 用程序对象来完成机构几何造型 。 2. 1. 1 VB 与 AutoCAD 的连接
用 VB 与 AutoCAD 连接起来 ,需要以下两个步骤 : (1) 在编写 VB 代码前 ,在 VB 编程环境中先引用 Auto2
图 3 机构参数计算窗口 2. 3 槽轮机构动力学计算窗口及其程序
该部份主要为根据槽轮机构工作状况 ,确定槽轮机构的转 矩 ,计算构件强度 ,选择电动机的功率等 。其动力学计算窗口如 图 4 所示 。
2 参数化设计和图形实现技术
2. 1 设计思想 VB 对 AutoCAD 的二次开发过程 ,就是在 VB 的 ID E 中编
机 械 设 计
J OU RNAL O F MAC H IN E D ESIGN
Vol. 23 No . 12 Dec. 2006
基于Matlab的曲线槽槽轮机构动力学仿真
基于Matlab的曲线槽槽轮机构动力学仿真
张俊;刘海生;金建新
【期刊名称】《湖北文理学院学报》
【年(卷),期】2005(026)002
【摘要】建立了曲线槽槽轮机构的动力学数学模型,介绍了运用Matlab/Simulink 软件进行动力学仿真的方法和具体操作步骤.通过实例验证表明,该仿真方法直观精确,提高了效率.
【总页数】3页(P61-63)
【作者】张俊;刘海生;金建新
【作者单位】襄樊学院,机械工程系,湖北,襄樊,441053;襄樊学院,机械工程系,湖北,襄樊,441053;华中科技大学,机械学院,湖北,武汉,430074
【正文语种】中文
【中图分类】TH122
【相关文献】
1.基于ADAMS槽轮机构动力学仿真 [J], 宋国亚;王晖;赵俊鹏;常笑鹏
2.基于UG的曲线槽轮机构设计 [J], 谢晓华
3.基于MATLAB外槽轮机构的运动分析 [J], 熊文伟;张国平
4.基于Matlab的机器海豚直游动力学仿真 [J], 王全吉;巩伟杰
5.基于MATLAB/Simulink的横风作用下车辆侧向动力学仿真 [J], 梅辉;秦永法;张浩文
因版权原因,仅展示原文概要,查看原文内容请购买。
04-槽轮机构的运动分析-1
04-槽轮机构的运动分析-104-槽轮机构的运动分析-1% 外槽轮机构运动分析dr=pi/180.0; % 角度与弧度的转换系数% 销轮2转角范围:-f20<f2<f20,步长为bc度,计算运动参数< bdsfid="66" p=""></f2<f20,步长为bc度,计算运动参数<> for z=4:2:10 % 设定槽轮槽数f30=pi/z; % 计算槽轮槽间半角f20=pi/2-f30; % 计算销轮运动半角lmd=sin(pi/z); % 计算曲柄2与机架1的长度比bc=10; % 循环步长cz=-f20/dr; % 循环初值zz=f20/dr; % 循环终值i=1; % 根据步长变化的运动参数矩阵cs行数计数器for f2=cz:bc:zz % 计算槽轮角位移、类角速度、类角加速度wy=atan(lmd*sin(f2*dr)/(1-lmd*cos(f2*dr)));sd=lmd*(cos(f2*dr)-lmd)/(1-2*lmd*cos(f2*dr)+lmd^2);jsd=-lmd*sin(f2*dr)*(1-lmd^2)/(1-2*lmd*cos(f2*dr)+lmd^2)^2;switch z % 矩阵c(i,:)表示第i行的各列元素case 4,c4(i,:)=[f2 wy/dr sd jsd];case 6,c6(i,:)=[f2 wy/dr sd jsd];case 8,c8(i,:)=[f2 wy/dr sd jsd];case 10,c10(i,:)=[f2 wy/dr sd jsd];endi=i+1;endend% 输出外槽轮机构运动参数['轮槽数z=4'][' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']% 矩阵c(:,j)表示第j列的各行元素[c4(:,1),c4(:,2),c4(:,3),c4(:,4)]['轮槽数z=6'][' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']% 矩阵c(:,j)表示第j列的各行元素[c6(:,1),c6(:,2),c6(:,3),c6(:,4)]['轮槽数z=8'][' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']% 矩阵c(:,j)表示第j列的各行元素[c8(:,1),c8(:,2),c8(:,3),c8(:,4)]['轮槽数z=10'][' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']% 矩阵c(:,j)表示第j列的各行元素[c10(:,1),c10(:,2),c10(:,3),c10(:,4)]%% 绘制槽轮机构运动参数曲线figure(1); % 生成槽轮运动线图窗口subplot(2,2,1); % 选择第1个子窗口plot(c4(:,1),c4(:,3),c4(:,1),c4(:,4)) % 绘制z= 4的线图title('外槽轮槽数z=4') % 标注子窗口名称axis([-pi/4/dr pi/4/dr -6 6]) % 定义坐标轴范围grid % 栅格线text(-2,4.2,'\epsilon/\omega^{2}') % 标注类角加速度线图text(20,1.6,'\omega/\omega') % 标注类角速度线图ylabel('槽轮运动线图') % 定义纵坐标轴名称%subplot(2,2,2); % 选择第2个子窗口plot(c6(:,1),c6(:,3),c6(:,1),c6(:,4)) % 绘制z= 6的线图title('外槽轮槽数z=6')axis([-pi/3/dr pi/3/dr -1.5 1.5])gridtext(10,-0.7,'\epsilon/\omega^{2}')text(30,0.7,'\omega/\omega')ylabel('槽轮运动线图')%subplot(2,2,3); % 选择第3个子窗口plot(c8(:,1),c8(:,3),c8(:,1),c8(:,4)) % 绘制z= 8的线图title('外槽轮槽数z=8')axis([-3*pi/8/dr 3*pi/8/dr -0.8 0.8])gridtext(12,-0.3,'\epsilon/\omega^{2}')text(40,0.4,'\omega/\omega')ylabel('槽轮运动线图')%subplot(2,2,4); % 选择第4个子窗口plot(c10(:,1),c10(:,3),c10(:,1),c10(:,4)) % 绘制z=10的线图title('外槽轮槽数z=10')axis([-2*pi/5/dr 2*pi/5/dr -0.5 0.5])gridtext(15,-0.2,'\epsilon/\omega^{2}')text(40,0.3,'\omega/\omega')ylabel('槽轮运动线图')%figure(2); % 生成类线图窗口subplot(1,2,1); % 选择第1个子窗口plot(c4(:,1),c4(:,3),c6(:,1),c6(:,3),c8(:,1),c8(:,3),c10(:,1),c10(:,3)) title('\omega/\omega')axis([-f20/dr f20/dr -0.1 2.5])gridtext(-10,0.35,'z=10')text(-8,0.7,'z=8')text(-8,1.1,'z=6')text(10,2.1,'z=4')ylabel('槽轮类角速度线图')%subplot(1,2,2); % 选择第2个子窗口plot(c4(:,1),c4(:,4),c6(:,1),c6(:,4),c8(:,1),c8(:,4),c10(:,1),c10(:,4)) title('\epsilon/\omega^{2}')axis([-f20/dr f20/dr -5.5 5.5])gridtext(-50,0.2,'z=10')text(-30,0.9,'z=8')text(-25,1.6,'z=6')text(0,3.5,'z=4')ylabel('槽轮类角加速度线图')。
第3-2节 槽轮机构仿真
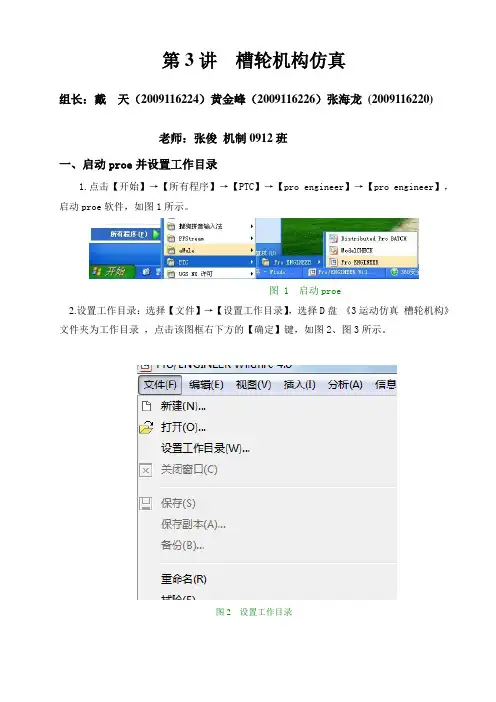
第3讲槽轮机构仿真组长:戴天(2009116224)黄金峰(2009116226)张海龙(2009116220)老师:张俊机制0912班一、启动proe并设置工作目录1.点击【开始】→【所有程序】→【PTC】→【pro engineer】→【pro engineer】,启动proe软件,如图1所示。
图 1 启动proe2.设置工作目录:选择【文件】→【设置工作目录】,选择D盘《3运动仿真槽轮机构》文件夹为工作目录,点击该图框右下方的【确定】键,如图2、图3所示。
图2 设置工作目录图3 打开文件二、新建加工文件1.点击【文件】→【新建】命令,选择类型为【组件】,子类型选择【设计】,将名称改为槽轮26-24-20,将【使用缺省模板】前的对勾去掉,如图4所示。
单击【确定】后弹出【新文件选项】对话框,【模板】选mmns asm design,单击【确定】完成任务的新建,如图5所示。
图4 设置工作文件并命名图5 选择模板三、零件的装配1.预览整个机构效果图单击工作窗口右边工具栏中的【装配】命令,在【打开】命令中单击【caolun.asm】项。
单击【预览】可在框图中查看整个槽轮机构组装好后的效果图,后面的组装皆可按此标准来进行,如图6所示。
图6 打开预览文件2 安装基座(1).单击工作窗口右边的【装配】命令,在【打开】命令中选择groun.prt 文件,即机座(也可以先行【预览】确认一下),点击【打开】,如下图7所示。
图7 打开机座文件(2).导入机座后单击图8中所示【自动】命令右边小三角形,将机座设置为【缺省】模式,当状态栏显示完全约束时,点击面板右端的对勾,完成机座的放置,如图8所示。
图8 设置机座模式3.槽轮的安装(1)同上点击【装配】选中并打开打开第二个文件cam.prt,即槽轮机构,点击工具栏旁的【用户定义】下拉菜单,选择【销钉】连接类型,如下图9所示。
图9 选则连接类型(2)先进行轴对齐,即选择机座机架上groung台的中心线A-4,再选择槽轮的中心线A-6,完成轴对齐。
槽轮机构的有限元分析与仿真
槽轮机构的有限元分析与仿真槽轮机构的有限元分析与仿真槽轮机构是一种常见的传动机构,广泛应用于机械设备中。
为了更好地理解和优化槽轮机构的性能,有限元分析与仿真成为了一种重要的工具。
本文将介绍槽轮机构有限元分析与仿真的步骤。
第一步是建立几何模型。
首先,根据实际的机构尺寸和形状,使用计算机辅助设计软件绘制出槽轮机构的三维模型。
在建立模型时,需要考虑到槽轮的齿数、齿廓等几何参数。
第二步是定义材料属性。
根据实际使用的材料类型,确定槽轮机构各个零件的材料属性,如弹性模量、泊松比等。
这些属性将影响有限元计算的结果。
第三步是网格划分。
将几何模型转化为有限元网格是有限元分析的关键步骤。
通过将模型划分为许多小的元素,可以对机构的行为进行离散化描述。
网格划分需要考虑到模型的复杂程度和计算的精度。
第四步是施加边界条件和加载条件。
根据机构的实际工作情况,确定边界条件和加载条件。
边界条件包括固定支撑和自由度限制,加载条件包括外力或力矩的施加。
这些条件将影响有限元计算结果的准确性。
第五步是进行有限元分析。
使用有限元分析软件对划分好的网格进行计算。
根据施加的边界条件和加载条件,计算机将通过求解离散化后的方程组,得到机构在给定工况下的应力、变形等结果。
第六步是结果验证与优化。
根据有限元分析的结果,对机构进行性能评估和优化。
如果计算结果与实际情况不符,需要重新检查模型、材料属性、加载条件等,直到达到预期的结果。
最后一步是结果可视化和报告撰写。
将有限元分析的结果可视化展示,如绘制应力云图、变形图等。
报告撰写是有限元分析工作的重要一环,通过清晰地记录分析过程和结果,便于后续参考和交流。
槽轮机构的有限元分析与仿真可以帮助工程师更好地理解和改进机构的性能。
通过逐步进行几何建模、材料定义、网格划分、边界条件与加载条件的设定、有限元分析、结果验证与优化等步骤,可以得到对机构行为的准确描述,并提供优化设计的依据。
CreoProe槽轮机构运动仿真
CreoProe槽轮机构运动仿真
本篇文章主要分享:Creo/Proe槽轮机构运动仿真,在运动仿真中关于间歇运动的机构里槽轮机构是比较常见的一类,其典型结构由主动转盘、从动槽轮和机架组成,它常被用于将主动件的连续转动转换从从动件的带有停歇的单向周期性转动,下面的文章就结合典型的槽轮机构和大家一起分享槽轮机构的运动仿真装配与仿真过程,具体效果如下图:
机构装配过程
STEP1 新建装配文件,并导入机架,装配方式为:默认(Proe版本为:缺省)
STEP2 装配从动槽轮,装配方式为:销钉连接
①约束轴对齐
②约束平移
③约束旋转轴
STEP3 装配主动转盘,同样采用销钉连接。
旋转轴TOP平面和ASM_FRONT平面,将角度设置为0
STEP4 点击[应用程序]-[机构]进入机构仿真环境中,并添加凸轮连接
STEP5 添加伺服电机。
点击右侧[伺服电机],选择主动转盘的轴作为运动轴
STEP6 创建机构分析,进行运动学分析,时间自定,点击下面的运行即可进行分析
完成效果。
基于ADAMS槽轮机构动力学仿真_宋国亚
≥7
1~2
表 2 尺 寸 列 表
名称
符号
数 值/mm
公式
说明
中心距
L
153.13
根据安装空间
销槽接触角度
θ
120°
运动系数设计得
拨盘转角
α1
15°
运动系数设计得
槽轮转角 圆柱销转动半径
槽顶高 圆柱销半径
φ2 R转
S R圆
45° 125.02 45.80
5.63
R转 =siLnθ*sinφ22 L
烄g ≥0
Fn >0 烅Fng =0
(5)
dg
Fn 烆
dt
=0
式 中 :g——— 接 触 作 用 点 的 距 离 ;
设备,然而目前的 安 瓿 针 剂 自 动 上 料 设 备 由 于 其 关键传动件槽轮 机 构 无 法 实 现 大 的 转 停 比,国 内 外一些学者对槽轮机构进行了相关研究。
文献[1]研究 了 槽 轮 机 构 存 在 的 一 系 列 固 有 缺 陷 ,比 如 其 动 程 不 可 调 节 ,转 角 也 不 能 太 小 。 文 献[2]指 出 了 槽 轮 机 构 在 起、停 时 的 加 速 度 大,有 冲击,并随着转速 的 增 加 或 槽 轮 槽 数 的 减 少 而 加 剧问题。为了克 服 槽 轮 机 构 这 种 结 构 缺 陷,文 献 [3]提 出 了 一 种 改 进 措 施,其 通 过 与 其 他 机 构,如
ADAMS based simulation on geneva mechanism dynamics
SONG Guoya1, WANG Hui 1* , ZHAO Junpeng1, CHANG Xiaopeng2
机构运动仿真的一般过程
机构运动仿真的一般过程机构运动仿真的一般过程机构运动仿真是利用数学模型分析实际机构动作情况的一种仿真技术,它广泛应用于工业自动化系统控制、机械产品设计等领域。
一般来说,机构运动仿真的一般过程分为以下几个步骤:(1)创建模型。
在进行仿真之前,首先要创建一个可以模拟实际机构运动的数学模型。
这个模型既要考虑到机构的运动特性,又要考虑到涉及到的物理性质,比如力学状态、物理行为等。
在创建模型的过程中,还要考虑到机构中各个元素的位置和组合如何,以及这些元素之间的相互作用。
(2)进行参数设置。
在创建模型之后,接下来要根据实际机构的情况,设置模型中的参数。
这些参数要包括机构的运动参数,以及机构中的一些材料参数。
这些参数的设置要符合实际机构的运动特性及各元素之间的相互作用情况,才能为模拟提供正确的输入参数。
(3)运行仿真。
当模型创建完毕并且设置输入参数之后,就要进行仿真运行,模拟实际机构的运动情况。
在运行仿真之前,要设定一些仿真控制参数,比如仿真步长、仿真时间、数值方法等。
运行完成后,可以获得机构运动的仿真结果,也可以获得关于机构运动的各个性质的数据,包括位置、速度、力矩等。
(4)结果分析。
最后,对仿真结果进行系统的分析,以确定机构运动的性能是否满足要求。
结果分析的时候,要考虑机构运动的各个性质,包括位置、速度、力矩等,以及各个组件之间的相互作用关系。
从而可以有效地分析机构运动的效果,以决定机构的性能是否符合要求。
以上就是机构运动仿真的一般过程。
机构运动仿真能够及时发现机构运动的问题,为机械设计提供参考,从而提高机构的性能和效率。
12-2槽轮机构
运动特性分析: ①槽轮运动的ω max、amax随槽数z的增多而减小。 ②存在柔性冲击。Z愈少,冲击愈大。
圆销进入或退出径向槽时,角速度有突槽轮机构
用同样方法可求得内啮合槽轮机构 的运动曲线如图所示。
2 12
1.0 0.75 0.5 0.25 0 -0.25 -0.5 -0.75 0.8 0.4 0.2
ω1
R
o1
-α1≤α≤α1 -φ2≤φ≤φ2 在△ABO2中有如下关系:
AB R sin tg O2 B L R cos
α
α 1 -α 1
A L
φ B
φ2
O2 -φ2
ω2
令λ= R / L,并代入上式得: sin 1 =tg 1 cos
分别对时间求一阶导数、和二阶导数,得:
槽数z 圆销数n 3 1~6 1/6~1
k≤1 得:n≤2z/ (z -2)
4
1~4 0.25~1 5 、6 1~3 ≥7
提问:why k≤1? 事实上,当k=1时,槽轮机构已经不具备间歇运动特性了。
1~2
0.36~1
运动系数k
0.3~1
当z=4及n=2时 k=n(1/2-1/z) = 0.5 说明此时槽轮的运动时间和静止时间相等。
ω1
2α1 90° 90° 2φ
2
ω2
为减少冲击,进入或退出啮合时,槽中心线与拨销中 心连线成90°角。故有: 2α1=π -2φ2 =π -(2π /z) = 2π (z-2)/2z 代入上式
k =1/2-1/z ∵ 将2α1代入得:
k>0 ∴ 槽数 z≥3
可知:当只有一个圆销时,k=1/2-1/z < 0.5 即槽轮的运动时间总是小于其静止时间。 如果想得到k≥0.5的槽轮机构,则可在拨盘上多装几个 圆销,设装有n个均匀分布的圆销,则拨盘转一圈,槽 轮被拨动n次。故运动系数是单圆柱销的n倍,即: k= n(1/2-1/z) ∵
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
槽轮机构运动仿真教程1.进入组件设计环境
进入组件设计环境之后开始装配元件,并对其进行约束;
底板:因为底板是不动的,故可设为用户定义中的缺省或固定连接;
主动件:主动件轴线与底板轴线设为销钉连接,主动件底面与底板上面设为平面移动连接;从动件:从动件的连接方式同上。
装配好之后可以按下Ctrl+Alt并单击左键对装配好的元件进行移动,看其是否满足运动所需要的条件。
2进入机构环境(应用程序—机构)
3定义凸轮连接
点击右图标栏--新建进入凸轮连接对话框(如下)
定义凸轮1:单击对话框上的箭头进行曲面的选择,根据运动关系选取主动件上小圆柱的外圆
定义凸轮2:方法同上选取该元件的外表面
由于运动所需点击属性栏里的启用升离
4.定义电机
点击-新建出现如下对话框
选取凸轮1的轴线并在轮廓选项进行以下操作
5.定义运动分析
点击,弹出如下对话框
可以根据需要定义时间和其他选项,运行就OK了(确定后退出)6.回放以前的运动分析
点击弹出如下对话框
点击后弹出如下对话框
调解速度,观察运动过程
7. 动画的生成
单击中的“”,可得到抓帧后的“视频动画”。