基于MatlabSimulink的槽轮机构间歇运动特性的分析与仿真
MATLAB-SimMechanics机构动态仿真

扑结构,但至少有一个构件是Ground模块,而且
有一个环境设置模块直接与其相连。
一个构件可能不止两个铰(Joint),即可以
产生分支。但是一个较只能连接两个构件。
(3)配置Body模块:双击模块,打开参数对话
框,配置质量属性(质量和惯性矩),然后确定
Body模块和Ground模块与整体坐标系或其他坐标
(6)选择、连接和配置Actuator和Sensor模块: 从对应的模块库中添加所需模块至模型窗口,并依 次连接。通过Actuator模块确定控制信号,通过 Sensor模块测量运动。Actuator、Sensor模块实现 SimMechanics模块与Simulink模块的连接。利用这 两个模块就能够达到与Simulink环境实现信号传递。
2021/10/10
3
• 模块组包含刚体子模块组(Bodies)、约束与驱 动模块组(Constraints&Drivers)、力单元模块 组(Force Elements)、接口单元模块组 (Interface Elements)、运动铰 模块组(Joints)及 传感器和激励器模块组 (Sensors&Actuators) 和辅助工具模块组 (Utilities)。
2021/10/10
20
4.3 SimMechnics建模
1.建模基本步骤
不管模型有多么复杂都可以用同样的步骤建
立模型。这些步骤有些类似建造一个Simulink模
型。
(1)选择Groud、Body、和Joint模块:从
Bodies和Joints模块组中拖放建立模型所必需的
Body和Joint模块,还包括Machine Environment
Six-DoF(六自由度)、Spherical(球面铰,三
基于MatlabSimulink的仿真方法研究
收稿日期:2000207207 作者简介:简清华(19612),男,江西新余人,工程师;从事计算机管理及其应用方面的教学工作。
基于Matlab Simulink 的仿真方法研究简清华,杨高波(华东交通大学电气与信息工程学院,南昌330013) [摘 要] 本文介绍了运用Matlab 工具箱之一的动态仿真工具Simulink 进行仿真的方法,并结合一个异步电动机的实例,对仿真过程中出现的一些热点问题如提高仿真速度、仿真结果分析等进行了深入的阐述。
同时对Simulink 与G UI 的接口也作了介绍。
[关键词] Matlab ;Simulink ;异步电动机[中图分类号]TP391.9 [文献标识码]A [文章编号]100020682(2001)0420041203R esearch on a simulation method on Matlab SimulinkJ I AN Qing 2hua ,Y ANG G ao 2bo(Electrical &Information School o f East China Jiaotong Univer sity ,Nanchang 330013,China ) Abstract :This paper presents a simulation tool called simulink ,one of the Matlab toolboxes.The paper al 2s o expounds s ome central issues ,such as how to im prove the simulation speed ,the analysis of simulation results and s o on during the simulation in combination with an exam ple of asynchronous m otor.The interface of simulink and G UI is als o discussed. K ey w ords :Matlab ;Simulink ;Asynchronous m otor Matlab 是Mathw orks 公司推出的当今国际上最为流行的软件之一。
Matlab系列之Simulink仿真教程

交互式仿真
Simulink支持交互式 仿真,用户可以在仿 真运行过程中进行实 时的分析和调试。
可扩展性
Simulink具有开放式 架构,可以与其他 MATLAB工具箱无缝 集成,从而扩展其功 能。
Simulink的应用领域
指数运算模块
用于实现信号的指数运算。
减法器
用于实现两个信号的减法 运算。
除法器
用于实现两个信号的除法 运算。
对数运算模块
用于实现信号的对数运算。
输出模块
模拟输出模块
用于将模拟信号输出 到外部设备或传感器。
数字输出模块
用于将数字信号输出 到外部设备或传感器。
频谱分析仪
用于分析信号的频谱 特性。
波形显示器
控制工程
Simulink在控制工程领域 中应用广泛,可用于设计 和分析各种控制系统。
信号处理
Simulink中的信号处理模 块可用于实现各种信号处 理算法,如滤波器设计、 频谱分析等。
通信系统
Simulink可以用于设计和 仿真通信系统,如调制解 调、信道编码等。
图像处理
Simulink中的图像处理模 块可用于实现各种图像处 理算法,如图像滤波、边 缘检测等。
用于将时域信号转换为频域信号,如傅里叶变换、 拉普拉斯变换等。
03 时域变换模块
用于将频域信号转换为时域信号,如逆傅里叶变 换、逆拉普拉斯变换等。
04
仿真过程设置
仿真时间的设置
仿真起始时间
设置仿真的起始时间,通 常为0秒。
步长模式
选择固定步长或变步长模 式,以满足不同的仿真需 求。
基于MATLA BSIMULINK短路故障仿真及分析
……………………. ………………. …………………山东农业大学 毕 业 论 文 基于MATLAB/SIMULINK 短路故障仿真及分析 院 部 机械与电子工程学院 专业班级 电气工程及其自动化3班 届 次 20**届 学生姓名 学 号 指导教师 二О**年六月六日装订线……………….……. …………. …………. ………摘要................................................................................................................................................. i i Abstract (II)1 引言 (1)1.1 MATLAB/Simulink概述 (1)1.1.1 MATLAB简介及特点 (1)1.1.2 SIMULINK简介及特点 (3)1.2 电力系统仿真概述 (4)1.3 基于MATLAB/Simulink电力系统仿真的发展趋势 (7)2 三相短路故障仿真分析 (9)2.1 电力系统故障简述 (9)2.2 仿真实例 (11)2.2.1 实例仿真摘要 (11)2.2.2 仿真模型建立 (12)2.2.3 三相短路故障仿真及结论分析 (20)3 同步发电机机端短路故障仿真分析 (26)3.1 暂态过程仿真及分析 (26)3.2 其它故障仿真分析 (28)4 结束语 (29)参考文献 (30)致谢 (31)Summary ......................................................................................................................................... i i Abstract (II)1 Introduction (1)1.1 MATLAB/ Simulink Outline (1)1.1.1 MATLAB Introduction and Features (1)1.1.2 Simulink Introduction and Features (3)1.2 Overview of Power System Simulation (4)1.3 Based on the development trend of MATLAB / Simulink Power System Simulation (7)2 Simulation and Analysis (9)2.1 Power System Fault Description (9)2.2 Simulation examples (11)2.2.1 The simulation summary (11)2.2.2 Simulation Model (12)2.2.3 Phase short circuit fault simulation analysis and conclusions (20)3 Synchronous Generator short-circuit fault simulation (26)3.1 Transient Simulation and Analysis (26)3.2 Other fault simulation analysis (28)4 Conclusion (29)References (30)Acknowledgements (31)基于MATLAB/SIMULINK短路故障仿真及分析(山东农业大学机械与电子工程学院山东泰安271018)摘要:随着电力系统的规模不断增大,很多大型电力科研试验很难以进行。
matlab的simulink仿真建模举例

matlab的simulink仿真建模举例Matlab的Simulink仿真建模举例Simulink是Matlab的一个工具包,用于建模、仿真和分析动态系统。
它提供了一个可视化的环境,允许用户通过拖放模块来构建系统模型,并通过连接和配置这些模块来定义模型的行为。
Simulink是一种功能强大的仿真平台,可以用于解决各种不同类型的问题,从控制系统设计到数字信号处理,甚至是嵌入式系统开发。
在本文中,我们将通过一个简单的例子来介绍Simulink的基本概念和工作流程。
我们将使用Simulink来建立一个简单的电机速度控制系统,并进行仿真和分析。
第一步:打开Simulink首先,我们需要打开Matlab并进入Simulink工作环境。
在Matlab命令窗口中输入"simulink",将会打开Simulink的拓扑编辑器界面。
第二步:创建模型在拓扑编辑器界面的左侧,你可以看到各种不同类型的模块。
我们将使用这些模块来构建我们的电机速度控制系统。
首先,我们添加一个连续模块,代表电机本身。
在模块库中选择Continuous中的Transfer Fcn,拖动到编辑器界面中。
接下来,我们添加一个用于控制电机速度的控制器模块。
在模块库中选择Discrete中的Transfer Fcn,拖动到编辑器界面中。
然后,我们需要添加一个用于输入参考速度的信号源模块。
在模块库中选择Sources中的Step,拖动到编辑器界面中。
最后,我们添加一个用于显示模拟结果的作用模块。
在模块库中选择Sinks 中的To Workspace,拖动到编辑器界面中。
第三步:连接模块现在,我们需要将这些模块连接起来以定义模型的行为。
首先,将Step模块的输出端口与Transfer Fcn模块的输入端口相连。
然后,将Transfer Fcn模块的输出端口与Transfer Fcn模块的输入端口相连。
接下来,将Transfer Fcn模块的输出端口与To Workspace模块的输入端口相连。
基于Matlab的槽轮机构优化设计
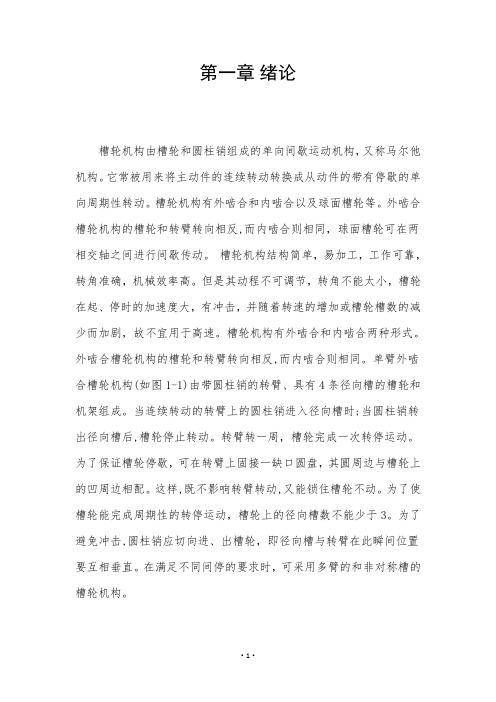
第一章绪论槽轮机构由槽轮和圆柱销组成的单向间歇运动机构,又称马尔他机构。
它常被用来将主动件的连续转动转换成从动件的带有停歇的单向周期性转动。
槽轮机构有外啮合和内啮合以及球面槽轮等。
外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同,球面槽轮可在两相交轴之间进行间歇传动。
槽轮机构结构简单,易加工,工作可靠,转角准确,机械效率高。
但是其动程不可调节,转角不能太小,槽轮在起、停时的加速度大,有冲击,并随着转速的增加或槽轮槽数的减少而加剧,故不宜用于高速。
槽轮机构有外啮合和内啮合两种形式。
外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同。
单臂外啮合槽轮机构(如图1-1)由带圆柱销的转臂、具有4条径向槽的槽轮和机架组成。
当连续转动的转臂上的圆柱销进入径向槽时;当圆柱销转出径向槽后,槽轮停止转动。
转臂转一周,槽轮完成一次转停运动。
为了保证槽轮停歇,可在转臂上固接一缺口圆盘,其圆周边与槽轮上的凹周边相配。
这样,既不影响转臂转动,又能锁住槽轮不动。
为了使槽轮能完成周期性的转停运动,槽轮上的径向槽数不能少于3。
为了避免冲击,圆柱销应切向进、出槽轮,即径向槽与转臂在此瞬间位置要互相垂直。
在满足不同间停的要求时,可采用多臂的和非对称槽的槽轮机构。
图1-11.1 槽轮机构的应用槽轮机构具有结构简单、制造容易、工作可靠和机械效率较高等优点。
但是槽轮机构在工作时有冲击,随着转速的增加及槽数的减少而加剧,故不宜用于高速,其适用范围受到一定的限制。
槽轮机构一般用于转速不是很高的自动机械、轻工机械和仪器仪表中。
例如图1-2a所示的电影放映机中的送片机构。
由槽轮带动胶片,作有停歇的送进,从而形成动态画面。
此外也常与其它机构组合,在自动生产线中作为工件传送或转位机构。
如图1-2b,为蜂窝煤制机模盘转位机构。
图1-2a 电影胶片抓拍机构图1-2b 蜂窝煤制机模盘转位机构1.2 槽轮机构的工作原理槽轮机构的运动特性槽轮机构的主要参数是槽数z 和拨盘圆柱销数k 。
基于MATLABSimulink的机电一体化系统的仿真分析实验
实验五、基于MATLAB/Simulink的机电一体化系统的仿真分析实验一、实验目的机电一体化系统建模是进行机电一体化系统分析与设计的基础,通过对系统的简化分析建立描述系统的数学模型,进而研究系统的稳态特性和动态特性,为机电一体化系统的物理实现和后续的系统调试工作提供数据支持,而仿真研究是进行系统分析和设计的有利方法。
本实验目的在于通过实验使同学对机电一体化系统建模方法和仿真方法有初步的了解,初步掌握在MA TLAB/ SIMULINK环境下对机电一体化系统数学模型进行仿真的方法。
(1)掌握机电一体化系统数学建模的基本方法(2)掌握机电一体化系统数学仿真的基本方法和步骤。
(3)掌握在MA TLAB/ SIMULINK环境下对机电一体化系统数学模型进行仿真的方法。
二、实验器材(1)计算机(2)MA TLAB/ SIMULINK软件三、实验原理(一)建立数学模型以一定的理论为依据把系统的行为概括为数学的函数关系,包括以下内容:1)确定模型的结构,建立系统的约束条件,确定系统的实体、属性与活动。
2)测取有关的模型数据。
3)运用适当理论建立系统的数学描述,即数学模型。
4)检验所建立的数学模型的准确性。
机电一体化系统数学模型的建立是否得当,将直接影响以此为依据的仿真分析与设计的准确性、可靠性,因此必须予以充分重视,以采用合理的方式、方法。
(二)机电一体化系统的计算机数字仿真实现1)根据已建立的数学模型和精度、计算时间等要求,确定所采用的数值计算方法。
2)将原模型按照算法要求通过分解、综合、等效变换等方法转换为适于在数字计算机上运行的公式、方程等。
3)用适当的软件语言将其描述为数字计算机可接受的软件程序,即编程实现。
4)通过在数字计算机上运行,加以校核,使之正确反映系统各变量动态性能,得到可靠的仿真结果。
(三).凑试法确定PID调节参数凑试法是通过模拟或闭环运行(如果允许的话)观察系统的响应曲线(例如阶跃响应),然后根据各调节参数对系统响应的大致影响,反复凑试参数,以达到满意的响应,从而确定PID调节参数。
基于MATLAB_SIMULINK的牛头刨床导杆机构运动学及动力学分析
基于MATLAB/SIMULINK的牛头刨床导杆机构运动学及动力学分析Kinematics and dynamics analysis of guide-bar mechanism in shaping machine based on MATLAB/SIMULINK钱文婷1,徐承妍2,李滨城1QIAN Wen-ting1, XU Cheng-yan2, LI Bin-cheng1(1. 江苏科技大学机械工程学院,镇江 212003;2. 华东师范大学软件学院,上海 200062)摘 要:本文运用MATLAB/SIMULINK 软件对牛头刨床导杆机构进行了运动学和动力学分析,并通过仿真直观地揭示了机构的运动规律和受力情况,为对其深入研究提供了基础。
另外,在应用SIMULINK进行运动学仿真过程中采用了微分的方法,从而使数学建模过程更为简便。
关键词:牛头刨床导杆机构;运动学分析;动力学分析; MATLAB/SIMULINK中图分类号:TP321 文献标识码:A 文章编号:1009-0134(2011)2(上)-0104-03 Doi: 10.3969/j.issn.1009-0134.2011.2(上).330 引言随着计算机技术的发展,在机构综合中计算机辅助分析得到了迅猛发展,特别为其建模仿真提供了极大的方便[1],为后续综合出机械最优化设计参数提供了可能。
牛头刨床是一种常见的金属切削机床,其导杆机构作为牛头刨床的主要执行机构,实现将回转运动转变为直线往复运动的重要功能,如图1所示。
本文运用矢量法和矩阵法建立了牛头刨床导杆机构分析的数学模型,在对其进行运动学和动力学分析的基础上,运用MATLAB/SIMULINK进行了运动学和动力学仿真,从而获得了机构的运动曲线图及运动副反力曲线图,为对其进一步深入研究提供了基础。
1 运动学分析1.1 数学模型的建立建立如图1所示的直角坐标系,将各构件视为杆矢量。
matlab-SIMULINK仿真实例解析
二并联杆数控螺旋面钻头尖刃磨机的机构仿真一、仿真原理一、实训题目:全自动洗衣机控制系统实训目的及要求:1、掌握欧姆龙PLC的指令,具有独立分析和设计程序的能力2、掌握PLC梯形图的基本设计方法3、培养分析和解决实际工程问题的能力4、培养程序设计及调试的能力5、熟悉传输带控制系统的原理及要求实训设备::1、OMRON PLC及模拟实验装置1台2、安装CX-P编程软件的PC机1台3、PC机PLC通讯的RS232电缆线1根实训内容:1、分析工艺过程,明确控制要求(1)按下启动按扭及水位选择开关,相应的显示灯亮,开始进水直到高(中、低)水位,关水。
(2)2秒后开始洗涤。
(3)洗涤时,正转30秒停2秒;然后反转30秒停2秒。
(4)循环5次,总共320秒,然后开始排水。
排水后脱水30秒。
图1 全自动洗衣机控制2、统计I/O点数并选择PLC型号输入:系统启动按钮一个,系统停止按钮一个,高、中、低水位控制开关三个,高、中、低液位传感器三个,以及排水液位传感器一个。
输出:进出水显示灯一盏,高、中、低水位显示灯各一盏,电机正、反转显示灯各一盏,排水、脱水显示灯灯各一盏。
PLC的型号:输入一共有9个,考虑到留有15%~20%的余量即9×(1+15%)=10.35,取整数10,所以共需10个输入点。
输出共有8个,8×(1+15%)=9.2,取整数9,所以共需9个输出点。
可以选OMRON公司的CPM1A/CPM2A 型PLC就能满足此例的要求。
3、I/O分配表1 全自动洗衣机控制I/O分配表输入输出地址名称地址名称00000 启动系统按钮01000 排水显示灯00001 高水位选择按钮01001 脱水显示灯00002 中水位选择按钮01002 进、出水显示灯00003 低水位选择按钮01003 高水位显示灯00004 排水液位传感器01004 中水位显示灯00005 停止系统按钮01005 低水位显示灯00006 高水位液位传感器01006 电机正转显示灯00007 中水位液位传感器01007 电机反转显示灯00008 低水位液位传感器4、PLC控制程序设计及分析实现功能:当按下按钮00000,中间继电器20000得电并自锁,按下停止按钮00005,中间继电器20000掉电。
基于MATLABSIMULINK电动汽车感应电机建模仿真与特性分析
C3s/ 2r = C2s/ 2r C3s/ 2s =
2 cos U sin U 3 - sin U cosU
1
-
1 2
0
3 2
-
1 2
.
-
3 2
( 1)
笼型感应电机在 M - T 轴二相同步坐标系的 电压方程为
uM uT
= 0 0
Rs + L sp XsL s Lmp Xs1L m
- XLs Rs + L sp
关键词: 电动汽车; 感应电机; Matlab/ Simulink
中图分类号: U46213
文献标识码: A
Modeling, Simulation and Performance Analysis of Induction Motor of Electric Vehicle Using MATLAB/ SIMULINK
2003 年第 4 期 文章编号: 1009 4687 ( 2003) 03 0038 04
车辆与动力技术 Vehicle & Power Technology
总第 92 期
基于 MATLAB/ SIMULINK 电动汽车 感应电机建模仿真与特性分析
翟 丽, 彭连云, 孙逢春
( 北京理工大学机械与车辆工程学 院, 北京 100081)
为转子M 轴和 T 轴的电流; Rs, L s 分别为 MT 坐 标系上定子绕组的电阻和自感; Rr, L r 分别为 MT
坐标系上转子绕组的电阻和自感; L m 为 MT 坐标
系上定转子绕组间的互感; p 是微分算子; Xs 为
电源角频率; Xr 为转子加速度; Xs1 = ( Xs - Xr ) 为
iM
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Matlab/Simulink的槽轮机构间歇运动特性的分析与仿真
摘要:将槽轮机构转换为倒置曲柄滑块机构,建立了槽轮机构的运动数学模型,利用Matlab计算了槽轮机构的运动参数并绘制了相应的动态曲线,该方法直观精确,提高了设计效率。
关键词:槽轮机构间歇运动Matlab/Simulink 运动特性
Geneva mechanism based on Matlab/Simulink intermittent motion characteristics analysis and simulation
Abstract :Converse geneva mechanism for inverted slider-crank mechanism,the geneva machanism motion mathematical model is established,using Matlab to calculate the dynamic movement parameters of the geneva mechanism and draw the corresponding curve,the method is accurate,intuitive improves the design efficiency
Key words:the geneva mechanism intermittent motion Matlab / Simulink movement characteristics
0引言:
槽轮机构能将主动件连续旋转运动转换成从动件有规律的运动和停歇,是实现周期性运动和停歇的典型机构。
槽轮机构的结构简单,外形尺寸小,效率高,并能较平稳地、间歇地进行传位,在现代机械设备中得到了广泛的应用,但因传动时尚存在柔性冲击,故常用于速度不高的场合。
本文将针对槽轮机构的间歇运动,使用Matlab软件中的仿真工具箱Simulink进行运动学仿真,通过仿真得到从槽轮的运动变化曲线,并对槽轮机构的运动特性进行分析。
1槽轮机构的物理模型转换
图1 外槽轮机构简图图2 曲柄滑块机构
1-槽轮;2-拨盘1-滑块;2-曲柄;3-摇杆
在如图1所示为外槽轮机构简图,图2所示为倒置的曲柄滑块机构。
当销子和轮槽结合时图2中倒置曲柄滑块构造形式与图1中槽轮机构类似。
其中图1中带销子的拨盘2可视为连杆2,而槽轮可视为连杆3,滑块1代表销子。
2槽轮机构的数学建模
整个系统的运动过程可分为两个状态,即销子和轮槽结合与分离的两个状态
2.1槽轮和销子结合状态的数学模型
根据机构所构成的封闭图形可写出闭环矢量方程
R3+ R2= R1 (1)
将式(1)分别在y和x方向投影得到:
(2)
式中为连杆3的转角,为连杆2的转角
将等式组(3)对时间t求一阶导得:
(3)
式中为连杆3的角速度,为连杆2的角速度,连杆3的线速度
将等式组(3)对时间t求二阶导得得
(4)
解上述方程组即可求得连杆3的角加速度和线加速度
将式(4)写成矩阵形式即
2.2当槽轮和销子分离时的数学模型
在这段时间内控制系统运动的方程可写为:
(5)
3 Matlab/Simulink仿真模型的建立
3.1仿真建模和初值设定
(1)根据数学模型(4)和(5)确定所需模块,如时钟信号、函数计算器、积分器、示波器等,然后将各模块有机地连接起来,如图3所示;
(2)根据图1销子和轮槽刚结合的时刻设定仿真初始值,假定已知R3=R2=10,ω2=0.1rad/s,可设置与θ3 相关的积分器,ω3=0,θ2=θ3=45度。
对于矢量R3相关的两个积分器必须仔细考虑,当销子和槽啮合时,它们代表销子相对槽的速度和位移。
在其他时刻,他们应当为零。
当销子开始与槽结合时有检测函数产生信号从0切换到1,同时R3应当是它的最大值,而相对速度应当与
销子的绝对速度一样,因为销子从切线方向进入槽。
销子没进入槽时,这两个积分器必须重新设置成这些值。
为此Simulink提供了触发式的积分器使系统的仿真得以实现,因此可设theta3=pi/4,触发式积分器tritheta3=pi/4。
图3
3.2仿真结果分析
图4槽轮的角位移图
图5槽轮的角角速度图图6 槽轮的角加速度图
槽轮的角速度、角位移和角加速度随时间的变化曲线图
通过槽轮的角位移图像可以直观的看出槽轮的运动状态,具有间歇性;从槽轮角速度和加速度图像可直观的看到槽轮在开始运动和终止的瞬间角速度为零,而角加速度有突变,说明存槽轮和拨盘之间存在着冲击,我们通常称这种冲击为柔性冲击。
4.结论
从整个系统仿真过程看,Matlab /Simulink 仿真工具有极强的运算仿真功能,将其应用于机械工程中机构的运动学仿真,不仅可以得到构件位置、速度和加速度与仿真时间之间的关系还可以大大减少编程、调试及绘图的工作量,是一种行之有效的仿真方法。
本文所建立的运动学模型未考虑拨盘角速度的变化,是一个相对较简单的机械系统,对于复杂的机械系统可以引入Simulink中的高级模块进行仿真。
参考文献:
[1]杨可桢,程光蕴.机械设计基础[M].第四版.北京:高等教育出版社,2003.
[2]孙桓,陈作模,葛文杰.机械原理[M].第七版.北京:高等教育出版社,2006.
[3][美]约翰.F.加得纳.周进雄,等译.机构动态仿真使用MATLAB和SIMULINK [M]. 西安:西安交通大学出版社,2002 .。