[工学]第4章 平面问题的有限元法-3刚度矩阵
有限元 第3讲补充_平面问题-整体刚度矩阵
整体刚度矩阵
通过以上组装过程可以得到组装整体刚度矩阵的一般规则: 1 )结构中的等效节点力是相关单元结点力的叠加,整体 刚度矩阵的子矩阵是相关单元的单元刚度矩阵子矩阵的集成; 2)当整体刚度矩阵中的子矩阵K rs 中r=s时,该节点(节点r 或s)被哪几个单元所共有,则K rs 就是这几个单元的刚度矩阵 e 中的子矩阵 K rs 的相加。如 K 33 应该是单元①-④中对应子矩阵 (1) (2) (3) (4) 的集成,即 K33 K33 K33 K33 K33
0
0
0
0 1 0 2 (2) 0 3 K 0 4 0 5
式中: Fi (2) ——②号单元中第i(i=1,3,4)节点所受力;
K (2) ——②号单元的扩大刚度矩阵。
y
4 ④ ② ① 1 2 3③ 5
(1)
0 0
0 0
0 0 1 0 0 2 (1) 0 0 3 K 0 0 4 0 0 5
4 ④ ② ① 1 2 3③
5
x
o
K (1) ——①号单元的扩大刚度矩阵或称为单元贡献矩阵。
5
整体刚度矩阵
y
4 ④ ② ① 14 ④ ② ① 1 2 3③ 5
x
o
(1) (2) (1) (1) (2) (2) K11 K11 K12 K13 K13 K14 0 (1) (1) (3) (1) (3) (3) K 22 K 22 K 23 K 23 0 K 25 K 21 (1) (2) (1) (3) (1) (2) (3) (4) (2) (4) (3) (4) K 31 K 31 K 32 K 32 K 33 K 33 K 33 K 33 K 34 K 34 K 35 K 35 (2) (2) (4) (2) (4) (4) 0 K 43 K 43 K 44 K 44 K 45 K 41 (3) (3) (4) (4) (3) (4) 0 K K K K K K 52 53 53 54 55 55
有限元法刚度矩阵
有限元法刚度矩阵在工程和科学领域,有限元法是一种强大而广泛应用的数值分析方法。
其中,刚度矩阵是有限元法中的一个核心概念,它对于准确描述结构的力学行为和求解问题起着至关重要的作用。
让我们从最基础的层面来理解刚度矩阵。
想象一下,我们有一个简单的弹簧系统。
弹簧的刚度表示它抵抗变形的能力,也就是施加一定的力会产生多大的位移。
在更复杂的结构中,比如桥梁、飞机机翼或者机械零件,每个部分都有自己的抵抗变形的特性,这些特性综合起来就可以用刚度矩阵来表示。
刚度矩阵的元素反映了结构中各个节点之间的相互作用关系。
例如,如果一个结构有多个节点,每个节点在不同方向上的位移都会受到其他节点位移的影响。
刚度矩阵中的元素就定量地描述了这种影响的大小。
从数学的角度来看,刚度矩阵通常是一个对称矩阵。
这意味着矩阵的上三角和下三角部分是对称的。
这种对称性是由于物理问题的本质所决定的,它反映了结构的力学性质在不同方向上的一致性。
那么,刚度矩阵是如何构建的呢?这需要我们对结构进行离散化处理。
将复杂的结构划分成许多小的单元,每个单元都有自己的特性方程。
通过对这些单元的特性进行组合和叠加,就可以得到整个结构的刚度矩阵。
在实际应用中,有限元软件会根据用户输入的结构几何形状、材料属性和边界条件等信息,自动生成刚度矩阵。
例如,在分析一个钢梁的弯曲问题时,软件会首先将钢梁划分为一系列的小单元,然后根据钢梁的材料弹性模量、横截面形状等计算每个单元的刚度,最终组合成整个钢梁的刚度矩阵。
刚度矩阵的大小取决于结构的自由度数量。
自由度是指结构能够独立运动的方向和方式。
例如,一个平面上的节点可能有两个平移自由度(x 和 y 方向),如果考虑转动,则还会增加自由度。
结构的自由度越多,刚度矩阵的规模就越大,计算的复杂度也会相应增加。
为了更直观地理解刚度矩阵,我们可以通过一个简单的例子来说明。
假设有一个由两个弹簧连接的两个质量块组成的系统。
每个质量块可以在水平方向上移动,那么这个系统就有两个自由度。
有限元分析——平面问题
Re=
NT
s
Pstds
江西五十铃发动机有限公司
技术中心 12 /33
4、整体分析 整体刚度矩阵 整体刚度矩阵组装的基本步骤:
先求出各个单元的单元刚度矩阵; 将单元刚度矩阵中的每个子块放在整体刚度矩阵中的对应位置上,得到单 元的扩大刚度矩阵; 将全部单元的扩大矩阵相加得到整体刚度矩阵。
不失一般性,仅考虑模型中有四个单元,如图所示,四个单元的整体节点位 移列阵为
τZX z= + t/2 =0
因板很薄,载荷又不沿厚度变化,应力沿板 的厚度方向是连续分布的,可以认为,在整
Z
个板内各点都有
σZ=0 τYZ=0 τZX=0
O
tX
图1 平面应力问题
根据剪应力的互等性、物理方程,可得描述平面应力问题的八个独立的基本变量 为
江西五十铃发动机有限公司
技术中心 4 /33
σ=[σX σY τXY]T ε=[εX εY γXY]T
x2 y2 ɑ1= x 3 y 3
1 y2 b1=- 1 y 3
1 c1= 1
x2 x3
(1,2,3)
上式表示下标轮换,即1 2,2 3,3 1同时更换。
江西五十铃发动机有限公司
技术中心 9 /33
重写位移函数,并以节点位移的形式进行表达,有
uv((xx,,yy))N(x,y)qe
其中形函数矩阵为
Y
江西五十铃发动机有限公司
图2 平面应变问题
技术中心 5 /33
根据几何方程、物理方程可得,描述平面应变问题的独立变量也是八个,且与 平面应力问题的一样。只是弹性矩阵变为
1
D=
E1
1 1 2 1
1
有限元分析——平面问题
1 A1121
x1 x2
y1 y2
1 11
2
0 25
0 0
62m 5 m2
1 x4 y4 1 0 50
1 25 0
同理,A2
1 2
1
25
5 0 6 25mm2
1 0 50
对①单元,有
同理,对于②单元,有
b1=-50,c1=-25 b2=50, c2=0 b3=0, c3=25
N=
N1 0
0 N1
N2 0
0 N2
N3 0 0 N3
其中
Ni=
2
1 A
(ɑi +bix
+
ciy)
,i=1、2、3。
⑵单元的应变与应力
单元应变
ε=B qe
式中应变矩阵B为
B= 21Ab01
0 c1
b2 0
0 c2
b3 0
0 c3
c1 b1 c2 b2 c3 b3
节点位移列阵qe
qe=[u1 v1 u2 v2 u3 v3]T
江西五十铃发动机有限公司
技术中心 3 /33
一、平面问题的定义
1、平面应力问题
平面应力问题满足以下两个条件。
(1)几何条件 结构是一很薄的等厚度薄板;
(2)载荷条件 作用于薄板上的载荷平行于板平面、沿厚度方向均匀分布,而在
两板面上无外力作用。
Y
结论:板面不受力,则有
σZ Z= + t/2 =0
τYZ Z= + t/2 =0
有限元模型是一组仅在节点连接、仅靠节点传力、仅受节点载荷、仅在节点处 受约束的单元组合体。只有节点是可以承受载荷与约束的。
平面单元的有限元法

u
1
5
3
2
y
2x
3
5
2
y
则单元刚体位移为
v
4
5
2
3
x
6
y
3
2
5
u
1
5
3
2
y
v
4
5
2
3
x
记为
u v
1 4
0 y 0x
显然,位移函数包含 了单元的刚体位移 (平动和转动)
u v
j j
um
vm
[I]是单位矩阵,
[N]称为形函数矩阵,
Ni只与单元节点坐标有关,称为 单元的形状函数
4-2 平面问题的常应变(三角形)单元
据弹性力学几何方程得单元的应变分量
u
x y
xy
x
4-1 有限单元法的计算步骤
弹性力学平面问题的有限单元法包括五个主要步骤: 1、所分析问题的数学建模 2、离散化 3、单元分
析 4、整体分析与求解 5、结果分析
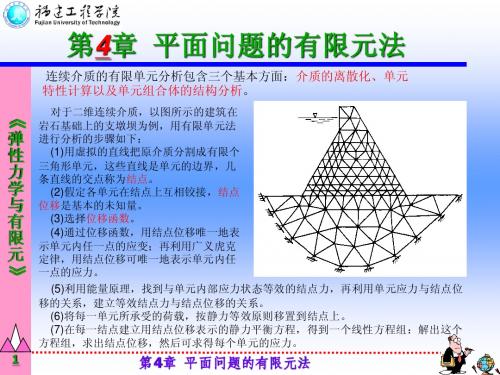
图 3-1
4-2 平面问题的常应变(三角形)单元
有限单元法的基础是用所谓有限个单元的集合 体来代替原来的连续体,因而必须将连续体简化为 由有限个单元组成的离散体。对于平面问题,最简 单,因而最常用的单元是三角形单元。因平面问题 的变形主要为平面变形,故平面上所有的节点都可 视为平面铰,即每个节点有两个自由度。单元与单 元在节点处用铰相连,作用在连续体荷载也移置到 节点上,成为节点荷载。如节点位移或其某一分量 可以不计之处,就在该节点上安置一个铰支座或相 应的连杆支座。如图3-1
第4章_平面问题的有限元法
》
位移模式需满足以下三个条件: 位移模式需满足以下三个条件: 1、位移模式必须反映单元的刚体位移 2、位移模式必须反映单元的常量应变 3、位移模式应尽可能反映位移的连续性
5
ui v i N , 0, N j , 0, Nm , 0 u j u e e i {d} = = Ni I N j I Nm I {δ } = [N] {δ } = v 0, Ni , 0, N j , 0, Nm v j u 1 0 I = I 二阶单位阵,[N] 形函数矩阵 m 0 1 vm
i
δvi
δu j
∗
δv j
∗
δu m
e
δ v m ]T
j(x j , y j )
Vj vj Uj u j
0
x
单元内虚位移
{ f } = [ N ]{δ }
vi ] (i, j , m轮换)
T
i ( xi , yi )
0
vi = α4 +α5 xi +α6 yi vj = α4 +α5 xj +α6 y j vm = α4 +α5 xm +α6 ym
ui
u =α1 +α2x +α3 y v =α4 +α5x +α6 y
将i、j、m坐标 分别代入得
Yj v j Xju j j( x j , y j )
{σ } = [D]{ε }
µ
1 0
0 0 称为平面应力问题的弹性矩阵 1− µ 2
7
第4章 平面问题的有限元法
对于平面应变问题
《
弹 性《 力土 学力 与 有学 限 元
有限元分析第四章

19
4)形函数的性质
形函数是有限单元法中的一个重要函数,它具 有以下性质: 性质1 形函数Ni在节点i上的值等于1,在其它节点 上的值等于0。对于本单元,有
20
Ni ( xi , yi ) 1 Ni ( x j , y j ) 0 Ni ( xm , ym ) 0
(i、j、m)
利用 N i 1 (ai bi x ci y )和ai、bi、ci公式证明 2A
对于一个具体问题进行分析,不管采用什么样的单元, 分析过程与思路是一样的,所不同的只是各种单元的位移模 式和单元刚度矩阵不一样,其他的包括整体刚度矩阵的组装 过程都完全一样,所以我们仅仅对矩形单元位移模式的求取 和单元刚度矩阵的求解加以介绍。
4.7 收敛准则
可以证明,对于一个给定的位移模式,其刚度系统的数 值要比精确值大。所以,在给定载荷的作用下,有限元计算 模型的变形要比实际结构的变形小。因而,当单元网格分得 越来越细时,位移的近似解将由下方收敛于精确解,即得到 真实解的下界。 为了保证解答的收敛性,要求选取的位移模式必须满足 以下三个条件: 1)位移模式必须包含单元的刚体位移 也就是说,当节点位移是某个刚体位移所引起时,弹 性体内将不会产生应变。所以位移模式不但要具有描述单元 本身形变的能力,而且还要具有描述由其他变形而通过节点 位移引起单元刚体位移的能力。例如,三角形三节点位移模 式中,常数项就是用于提供刚体位移的。
Ni(x、y)
1 i(xi,yi) x xi
x xi N i ( x, y ) 1 x j xi
N m ( x, y ) 0
证
N
y j (xj,yj)
m (xm,ym)
xj
x
N i ( x, y )
平面问题的有限元法

ym
1
在节点j、m上,
Ni x j , y j
1 2
ai bi x j ci y j
0
Ni xm
,
ym
1 2
ai
bi xm
ci
ym
0
(a)
(b) (c)
返回
类似地有
N j xi , yi 0 , N j x j , y j 1 , N j xm , ym 0 Nm xi , yi 0 , Nm x j , y j 0 , Nm xm , ym 1
由(3-19)、(3-20)式不难看出,[S]中的诸元素都
是常量,所以每个单元中的应力分量也是常量。
可见,对于常应变单元,由于所选取的位移模式是线
性的,因而其相邻单元将具有不同的应力和应变,即在单
元的公共边界上应力和应变的值将会有突变,但位移却是
连续的。
返回
第三节
形函数的性质
在上节中,提出了形函数的概念,即
x j xm
(i , j , m轮换) (3-9)
v
1 2
ai
bi x ci yvi
aj
bjx cj y
vj
am bm x cm yvm
(f)
若令
Ni
1 2
ai
bi x
ci y
(i , j , m轮换) (3-10)
这样,位移模式 (e) 和 (f) 就可以写为
返回
u Ni ui N j u j N mum v Nivi N jv j Nmvm
, v j 4 5xi 6 yi
uj 1 2xj 3yj , vj 4 5xj 6yj
um 1 2 xm 3 ym , vm 4 5 xm 6 ym
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(4-30)
组装总刚[k]的一般规则: 1.当[krs]中r=s时,该点被哪几个单元所共有,则总刚子矩 阵[krs]就是这几个单元的刚度矩阵子矩阵[krs]e的相加。 2.当[krs]中 r s 时,若rs边是组合体的内边,则总体刚度矩 阵[krs]就是共用该边的两相邻单元单刚子矩阵[krs]e的相加。 3. 当 [k rs ] 中 r 和 s 不同属于任何单元时,则总体刚度矩阵 [krs]=[0]。 下面,我们考查一个组装总刚的实例: 1. 整体刚度矩阵及载荷列阵的组集
({ } )
T
e T
R
e
(f)
而单元内的应力在虚
这里我们假定单元的厚度t为常量。把(d)式及(4-16) 式代入上式,并将提到积分号的前面,则有
({ } )
e T
B D B
T
e
tdxdy
根据虚位移原理,由(f)和(h)式可得到单元的虚功方程 即 e T e e T e T ({ } ) R ({ } ) B D B tdxdy 注意到虚位移是任意的,所以等式两边与相乘的项应该相等, 即得
[k]e =[B]T [D][B]t
(4-26)
与前面讨论过的情况类似,单元刚度矩阵[k]e中任一 列的元素分别等于该单元的某个节点沿坐标方向发生单 位位移时,在各节点上所引起的节点力。单元的刚度取 决于单元的大小、方向和弹性常数,而与单元的位置无 关,即不随单元或坐标轴的平行移动而改变。 将(4-26)式写成分块形式,即可得到平面应力问题 中三角形单元的刚度矩阵
对于平面应变问题,只要将上式中的E、分别换成E / 1- 即可。于是
和 / 1-
1 2 b b cr cs r s E 1 t 21 k rs 4 1 1 2 1 2 cr bs br cs 21 1
n 1 i j m n
(q)
若写成分块矩阵的形式,则
K11 K i1 K K j1 K m1 K n1 K1i K ii K ji K mi K ni K1 j K ij K jj K mj K nj K1m K im K jm K mm K nm K1n K in K jn K mn K nn
第四节
刚度矩阵
一. 单元刚度矩阵
为了推导单元的节点力和节点位移之间的关系,可 应用虚位移原理对图 4-2 中的单元 e 进行分析。单元 e 是 在等效节点力的作用下处于平衡的,而这种节点力可采 用列阵表示为
R
e
R
T i
R
T j
R
T T m
U
i
Vi
Uj
Vj
U m Vm
T
(a)
假设在单元e中发生有虚位移,则相应的三个节点i、 j、m 的虚位移为
1 2 cr bs 1 21 1 2 cr cs br b s 21 br cs
(4-29)
( r = i、j、m;s = i、j、m )
二、整体刚度矩阵
讨论了单元的力学特性之后,就可转入结构的整体分 析。假设弹性体被划分为 N 个单元和 n 个节点,对每个单 元按前述方法进行分析计算,便可得到N组形如(4-25) 式的方程。将这些方程集合起来,就可得到表征整个弹 性体的平衡关系式。
ui vi u j v j um vm
e
T
且假设单元内各点的虚位移为{f *},并具有与真实位移 相同的位移模式。
故有
f N
e
(c)
参照(4-13)式,单元内的虚应变{ *}为
B
e
(d)
于是,作用在单元体上的外力在虚位移上所做的功可写为
Bi T T e k B j D Bi B T m
Bj
kii Bm t k ji k mi
kij k jj kmj
kim k jm (4-27) kmm
其中 k rs Br D Bs t
R
e
B D Btdxdy
T
e
记
k B D B tdxdy
e T
(4-24) (4-25)
则有
R k
e e
e
上式就是表征单元的节点力和节点位移之间关系的刚 度方程,[k]e就是单元刚度矩阵。如果单元的材料是均质的 ,那么矩阵 [D] 中的元素就是常量,并且对于三角形常应 变单元,[B]矩阵中的元素也是常量。当单元的厚度也是常 量时,因 dxdy ,所以式(4-24)可简写为
k 2 n2 n
1
i j kii kij k ji k jj k mi k mj
m kim k jm k mm
T
1 br bs 2 cr cs Et 4 1 2 c b 1 b c r s r s 2
1 br cs cr bs 2 1 cr c s br b s 2
(4-28)
2
( r = i、j、m;s = i、j、m )