弹性力学平面问题的有限元法实例
Ansys机械工程应用精华60例第8例 平面问题的求解实例—厚壁圆筒问题
8.3.4
创建实体模型
拾 取 菜 单 Main Menu → Preprocessor → Modeling → Create → Areas → Circle → By Dimensions。弹出如图 8-8 所示的对话框,在“RAD1” 、 “RAD2” 、 “THETA2”文本框中分 别输入 0.1、0.05 和 90,单击“OK”按钮。 77
第8例
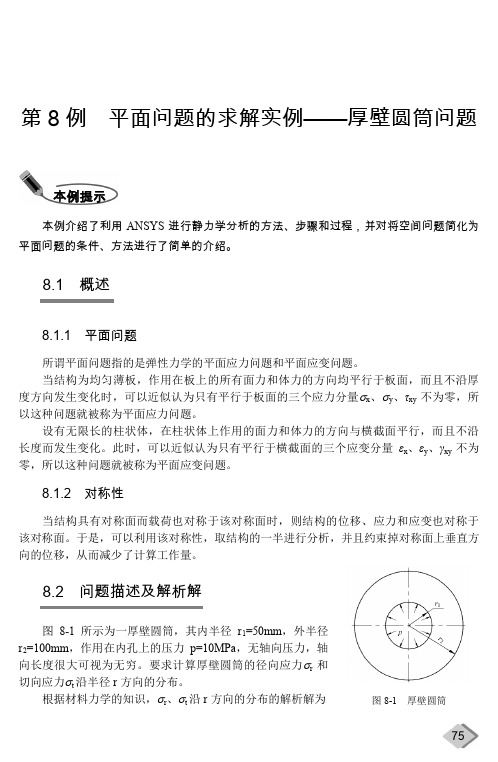
平面问题的求解实例——厚壁圆筒问题
“Item, Comp”两个列表中分别选“Stress” 、 “Y-direction SY” ,单击“OK”按钮。 注意:该路径上各节点 X、Y 方向上的应力即径向应力r 和切向应力t。
图 8-15
映射数据对话框
8.3.12
作路径图
拾取菜单 Main Menu→General Postproc→Path Operations→Plot Path Item→On Graph。弹 出如图 8-16 所示的对话框,在列表中选“SR” 、 “ST” ,单击“OK”按钮。
8.3.6
施加约束
拾取菜单 Main Menu→Solution→Define Loads→Apply→Structural→Displacement→On Lines。弹出拾取窗口,拾取面的水平直线边,单击“OK”按钮,弹出如图 8-11 所示的对话 框,在列表中选择“ UY ” ,单击“ Apply”按钮,再次弹出拾取窗口,拾取面的垂直直线 边,单击“OK”按钮,在图 8-11 所示对话框的列表中选择“UX” ,单击“OK”按钮。
76
第8例
平面问题的求解实例——厚壁圆筒问题
图 8-3 单元类型对话框
图 8-4
单元类型库对话框
图 8-5
弹性力学—第六章—用有限单元法解平面问题
1
需求解的结点还剩:
2
I III IV II 4 5 3
因此关于这六个零分量的六个平衡方程不 用建立,须将整体刚度矩阵的第1,3,7, 8,10,12以及同序列的各列去掉。最后 得到:
6
结构整体分析(10)
- 结点载荷
j
I II IV
1N/m
i
III i
m
1
I
m
j
2
例如,设单元 ij 边上受有x方向上的均布面力q,试求等效 结点载荷
载荷向结点移臵(7)
结构整体分析(1)
对于每个单元,我们已经知道了如何计算单元的劲度矩 阵以及载荷列阵:
结构整体分析(2)
根据虚功原理,我们也推导了结点力与结点位移的关系:
对于 i 点, 一个单元上的结点力为:
i 点的力平衡要求围绕 i 点的各单元产生的结点力与各单 元分配到 i 点的结点载荷相等。
3
6
结构整体分析(15)
1. 有限元法的求解步骤: 2. 划分有限元, 3. 利用已知的结点坐标以及结构的物理特性写出单元劲度 矩阵, 4. 利用整体编码与局部编码的关系写出整体刚度矩阵以及 力列阵, 5. 在整体刚度矩阵以及力列阵中将对应于零位移的行与列 划去,得到引入边界条件后的平衡方程组。 6. 求解平衡方程组,得到结点位移,并由此分析应力分布。
有限单元法的单元划分(2)
当结构具有凹槽或孔洞时,为了正确地描述应力集中效 应,必须把该处的网格画得很密。
当计算容量不允许时,可以分两次计算。第一次计算时, 将需要细化网格的目标区域的网格画得稀疏一点,甚至 和其他区域的网格大致相同,第二次计算时,将需要细 化的部分区域(区域边界上的结点位移是第一次计算后 的已知值)取出,利用第一次计算的计算结果,就可以 计算分析网格很密的目标区域了。
有限元分析——平面问题
Re=
NT
s
Pstds
江西五十铃发动机有限公司
技术中心 12 /33
4、整体分析 整体刚度矩阵 整体刚度矩阵组装的基本步骤:
先求出各个单元的单元刚度矩阵; 将单元刚度矩阵中的每个子块放在整体刚度矩阵中的对应位置上,得到单 元的扩大刚度矩阵; 将全部单元的扩大矩阵相加得到整体刚度矩阵。
不失一般性,仅考虑模型中有四个单元,如图所示,四个单元的整体节点位 移列阵为
τZX z= + t/2 =0
因板很薄,载荷又不沿厚度变化,应力沿板 的厚度方向是连续分布的,可以认为,在整
Z
个板内各点都有
σZ=0 τYZ=0 τZX=0
O
tX
图1 平面应力问题
根据剪应力的互等性、物理方程,可得描述平面应力问题的八个独立的基本变量 为
江西五十铃发动机有限公司
技术中心 4 /33
σ=[σX σY τXY]T ε=[εX εY γXY]T
x2 y2 ɑ1= x 3 y 3
1 y2 b1=- 1 y 3
1 c1= 1
x2 x3
(1,2,3)
上式表示下标轮换,即1 2,2 3,3 1同时更换。
江西五十铃发动机有限公司
技术中心 9 /33
重写位移函数,并以节点位移的形式进行表达,有
uv((xx,,yy))N(x,y)qe
其中形函数矩阵为
Y
江西五十铃发动机有限公司
图2 平面应变问题
技术中心 5 /33
根据几何方程、物理方程可得,描述平面应变问题的独立变量也是八个,且与 平面应力问题的一样。只是弹性矩阵变为
1
D=
E1
1 1 2 1
1
第4章 平面问题的有限元法-4收敛准则
8
9 10 11 12 13 14
2
4
6
8 10 12 14
(a)
(b)
图4-13
四. 单元节点i、j、m的次序 在前面章节中,我们曾指出,为了在计算中保证单元的 面积 不会出现负值,节点i、j、m的编号次序必须是逆时 针方向。事实上,节点i、j、m的编号次序是可以任意安排 的,只要在计算刚度矩阵的各元素时,对取绝对值,即可 得到正确的计算结果。在实际计算时,应该注意所选有限元 分析软件的使用要求。 五. 边界条件的处理及整体刚度矩阵的修正 在前面讨论整体刚度矩阵时,已经提到,整体刚度矩阵 的奇异性可以提高考虑边界约束条件来排除弹性体的刚体位 移,以达到求解的目的。
B =2(d+1)
若采取带宽压缩存储,则整体刚度矩阵的存储量N 最 多为N =2nB = 4n(d+1) 其中:d为相邻节点的最大差值,n为节点总数。 例如在图4-13中,(a)与(b)的单元划分相同,且节点 总数都等于14,但两者的节点编号方式却完全不同。(a) 是按长边进行编号, d =7, N =488;而(b)是按短边进行 编号,d =2,N =168。显然(b)的编号方式可比(a)的编号 方式节省280个存储单元。
为了保证解答的收敛性,要求位移模式必须满足以下三 个条件,即 ⑴ 位移模式必须包含单元的刚体位移。也就是说,当 节点位移是由某个刚体位移所引起时,弹性体内将不会产生 应变。所以,位移模式不但要具有描述单元本身形变的能力 ,而且还要具有描述由于其它单元形变而通过节点位移引起 单元刚体位移的能力。 例如,三角形三节点单元位移模式中,常数项1、4 就 是用于提供刚体位移的。 ⑵ 位移模式必须能包含单元的常应变。每个单元的应变 一般都是包含着两个部分:一部分是与该单元中各点的坐标 位置有关的应变(即所谓各点的变应变);另一部分是与位 置坐标无关的应变(即所谓的常应变)。从物理意义上看,
9第2章弹性力学平面问题及空间问题有限元
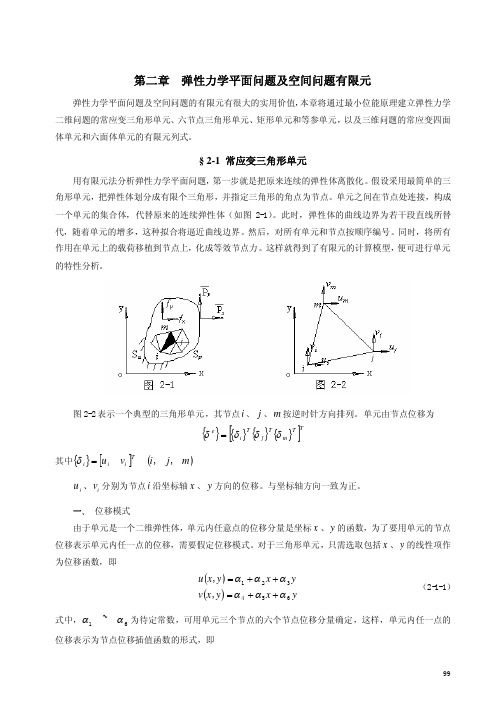
假定的位移函数是多项式,它是连续函数,可以肯定,在单元内部位移函数是单值连续的。由于单 元的位移函数 u 、 v 都是坐标 x 、 y 的线性函数,在单元边界上位移也是线性变化的,两个相邻单元在 公共节点上具有相同的节点位移,因而相邻单元在公共边界上位移连续,即协调条件得到满足。 由上面分析可以看出,三角形常应变单元的位移模式可以保证计算结果的收敛。
px
py
px
py ]
T
(2-1-7b)
(2 )若在 jm 边上受线性分布的水平方向的面力,它在 j 点的集度为 q ,在 m 点的集度为零 (如图 2-5) 。可预计由该面力求得的等效节点载荷只有 R xj 、
R xm ,其余节点载荷分量必为零。
将 jm 边上的分布面力写成 s 的函数,为
s { p} [ (1 ) q 0]T l 在 jm 边上的形函数也需用变量 s 表示,根据形函数的含义,
Ve
[k ii ] [k ij ] [ k im ] [k ji ] [k ij ] [k jm ] [k mi ] [ k mj ] [k mm ]
式中, t 为单元的厚度,当单元划分得足够小时,可以认为每个单元的厚度 t 为常值。子阵为
(2-1-5)
[k rs ] [ Br ]T [ D][B s ]tA
101
二、 单元刚度矩阵 1、单元几何矩阵 [ B ] 有了单元的位移模式,利用平面问题的几何方程求得应变分量
0 x x u e e 0 { } [ L][ N ]{} [B ]{} y y v xy y x
有限元2-弹性力学平面问题有限单元法(2.1三角形单元,2.2几个问题的讨论)分析

第2章弹性力学平面问题有限单元法2.1 三角形单元(triangular Element)三角形单元是有限元分析中的常见单元形式之一,它的优点是:①对边界形状的适应性较好,②单刚形式及其推导比较简单,故首先介绍之。
一、结点位移和结点力列阵设右图为从某一结构中取出的一典型三角形单元。
在平面应力问题中,单元的每个结点上有沿x、y两个方向的力和位移,单元的结点位移列阵规定为:相应结点力列阵为: (式2-1-1)二、单元位移函数和形状函数前已述及,有限单元法是一种近似方法,在单元分析中,首先要求假定(构造)一组在单元内有定义的位移函数作为近似计算的基础。
即以结点位移为已知量,假定一个能表示单元内部(包括边界)任意点位移变化规律的函数。
构造位移函数的方法是:以结点(i,j,m)为定点。
以位移(u i ,v i ,…u m v m )为定点上的函数值,利用普通的函数插值法构造出一个单元位移函数。
在平面应力问题中,有u,v两个方向的位移,若假定单元位移函数是线性的,则可表示成:(,)123u u x y x yααα==++546(,)v v x y x yααα==++(2-1-2)a式中的6个待定常数α1 ,…, α6 可由已知的6个结点位移分量(3个结点的坐标) {}⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=mjimeddddmjjivuvuvui{}iijjmXYX(2-1-1)YXYiejmmFF FF⎧⎫⎪⎪⎪⎪⎧⎫⎪⎪⎪⎪⎪⎪==⎨⎬⎨⎬⎪⎪⎪⎪⎩⎭⎪⎪⎪⎪⎪⎪⎩⎭确定。
将3个结点坐标(x i,y i ),(x j,y j ),(x m,y m )代入上式得如下两组线性方程:123i i i u x y ααα=++ 123j j j u x y ααα=++ (a)123m m m u x y ααα=++和546i i i v x y ααα=++ 546j j j v x y ααα=++ (b)546m m m v x y ααα=++利用线性代数中解方程组的克来姆法则,由(a)可解出待定常数1α 、2α 、3α :11A Aα=22A Aα=33A Aα=式中行列式:1i i i j j j m m m u x y A u x y u x y =2111i i j j m mu y A u y u y =3111i i j j m m x u A x u x u = 2111i i j j m mAx y A x y x y ==A 为△ijm 的面积,只要A 不为0,则可由上式解出:11()2m m i ij j a u a u a u A α=++ 21()2m m i ij j bu b u b u A α=++ (C )31()2m mi i j j c u c u c u A α=++式中:m m i j j a x y x y =- m m j i i a x y x y =- m i j j i a x y x y =-m i j b y y =- m j i b y y =- m i j b y y =- (d )m i j c x x =- m j i c x x =- m j i c x x =-为了书写方便,可将上式记为: m m i j ia x y x y =-m ij by y =- (,,)i j m u u u u ruu u u r m i jc x x =-(,,)i j m u u u u ru u u u r表示按顺序调换下标,即代表采用i,j,m 作轮换的方式便可得到(d)式。
弹性力学第6章---用有限单元法求平面问题

2.FEM分析的主要步骤:
1.将连续体变换为离散化结构 2.对单元进行分析 位移模式 应变列阵 应力列阵
结点力列阵 等效结点荷载列阵 3.整体分析
§6-3 单元的位移模式与解答的收敛性
e T
位移模式 三角形单元
FEM是取结点位移δi 为基本未知数的。问题是如何求 应变、应力。
( δ 来求出单元 首先,必须解决由单元的结点位移 δ i δ j δ m T d ((, u xy ) v (, xy ) 。 的位移函数 e 该插值公式表示了单 δ 应用插值公式,可由 求出位移 d 。 元中位移的分布形式,因此称为位移模式。 在结点三角形单元中,可以假定位移分量只是坐标的线性 函数,也就是假定:
FEM的分析过程(2) 2.单元分析
求解方法
每个三角形单元仍然假定为连续的、均匀的、各向同 性的完全弹性体。因单元内部仍是连续体,应按弹性力学 方法进行分析。 T 取各结点位移 δ 为基本未知量,然后 ( uv ) ( i 1 , 2 , ) i i i 对每个单元,分别求出各物理量,并均用 δ i 1 ,2 , )来表示。 i( 单元分析的主要内容: (1)应用插值公式, 由单元结点位移
e T δ ( δ δ δ ) i j m 求单元的位移函数
,
T d ((, u xyvxy ) , (, ) ) .
该插值公式称为单元的位移模式,记为 d Νδe .
(2)应用几何方程,由单元的位移函数d,求出单元的应变 ε Bδe .
FEM的分析过程(2) 2.单元分析
单元分析的主要内容: (1)应用插值公式, 由单元结点位移
FEM的分析过程(3) 3.整体分析
求解方法
作用于结点i上的力有:
有限元法求解平面问题
一般写成:
ai
业 大
xj yj 1 xj 1 y , xm ym bi 1 y j , ci 1 x (i, j, m) m m
学
第三节 单元位移模式 解的收敛性
用矩阵形式表示:
有 限 元 分 析
ui vi u 1 ai bi x ci y 0 a j bj x c j y 0 am bm x cm y 0 u j vj v 2A 0 ai bi x ci y 0 a j bj x c j y 0 am bm x cm y u m Ni 0 N j 0 N m 0 e N [ ]e vm [ ] 0 Ni 0 N j 0 N m 1 1 2 ai bi x ci y (i, j, m) u 1 这里: N i 形函数 2A [d ] e x y 0 0 0 3 v 4 N 形函数矩阵 则:[d ] 0 0 0 1 x y N
限 元 分 析
2A 1 y 4 m[a a j v j am vm ] ximviym 2A 1 5 [bi vi j bx v jy bm vm ] j j j 2A xi yi i 1 6 [ci vi c j v j cm vm ] x 2A
合 肥 工
1
业 大 学
D 题弹性矩阵:
平面应变问
有 限 元 分 析
第二节 结构离散化
合
肥
工
业
大
学
第二节 结构离散化 将连续体变换为离散化结构:将连续体划分为有限多个、有限大小的 单元,并使这些单元仅在一些节点处连接,构成所谓“离散化结构”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
分析与决策
(1)何种类型?
平面问题中的结构问题,且为静力问题;
平面问题中具有对称性,为减少[K],简化模型取
1/4;
简化后加约束,(1)在ox面上,位移u是对称的,
位移v是反对称的;在oy面上,位移u是反对称的, 位移v是对称的; (2)在ox面上,载荷对称,在oy 面上,载荷对称;
(1)何种类型?
4.5剖分面(续)
以垂线剖分面。依次单击preprocessor-modelingoperate-booleans-divide-area by line,弹出对话框, 选择对话框中的box单选,用窗口选择两个面元素, 后单击apply,在窗口中选L6-ok,完成面元素剖分。 单击plotctrls菜单中的numbering命令,关闭line numbers –ok; 单击plot菜单中的area命令,用面元素显示模型, 剖分的模型如图所示,由2个面变为4个面,面元素 的编号同时发生变化。
Preprocessor-material
props-material models-弹出define material model behavior 对话框-列表框material models available中, 依次单击structural-linear-elastic-isotropic, 添加弹性模量2.1e+11,泊松比0.3-ok;
操作过程
一、建立新文件
二、类型的选择 Structural-ok;
二、前处理
1、添加单元类型 选择:Quad 4node 42(单元库编号); 具有厚度:选择 option-plane str w/thk(平面应力有厚度);
2、设置实常数(Real constants)
3、添加材料属性(Material props)
布尔运算
布尔运算 是对几何实体进行合并的计算。ANSYS 中 布尔运算包括加、减、相交、叠分、粘接、搭接.
布尔运算时输入的可以是任意几何实体从简单的图 元到通过CAD输入的复杂的几何体。
加
输入实体
布尔运算
输出实体
布尔运算
所有的布尔运算可以在GUI界面下获得 Preprocessor > -Modeling- Operate. 在缺省状态下, 布尔运算时输入的几何实 体在运算结束后将删除. 被删除实体的编号数被“释放” (即, 这 些编号可以指定给新的实体,并从可以 获得的最小编号开始)。
L L 1 2 Partiti on L 3 L 5 L 6 L 4
4.4生成圆环
为什么要生成圆环呢? 主要原因在于原模型中的孔板 为五边形,为把模型分割成四 边形,生成四边形后即可用映 射网格(mapped)方法划分。 依次单击preprocessormodeling-create-areas-circlesolid circle,弹出solid circular areas对话框,输入半径0.1-ok; 依次单击preprocessormodeling-operate-booleans(布 尔运算)-overlap(覆盖)areas(对面元素操作),弹出 overlap areas对话框,单击pick all.
4.5剖分面
单击plotctrls菜单中的numbering命令,打开line numbers复选框-ok; 在单击菜单中的lines命令,用线元素显示模型;为 作垂直于L5的直线准备。 下面作垂线,依次单击preprocessor-modelingcreate-lines-lines-normal to line,弹出line normal to line对话框,在窗口中选择L5,在单击line normal to line对话框中的apply,单击右上角顶点, 单击ok以完成垂线。
(2)模拟什么?
平面应力、平面应变问题?
有细节:圆?
有对称性?
(3)何种单元类型?
二维实体单元类型,且有厚度;
可以选择plane2三角形单元,也可选择plane42四边形单元; 其区别可以查阅ansys help; 由于几何形状规则,选取四边形4节点单元,确定此单元后 分析发现取1/4后,不再是四条边,因为孔边是五边形,若 为五边形直接划分网格节点及单元边的连接出现不连续性, 影响精度要求或不能计算,选择的办法是将平面实体进行剖 分,分析得出沿(0.5,0.5)顶点引圆弧垂线可将其分为两 个部分,构成四条边。
相交和两两相交
公共相交只保留全部实体的共同部分. 两两相交则保留每一对实体的共同部分,这样,有可
能输出多个实体.
Common Intersection
Pairwise Intersection
互分
布尔运算
把两个或多个实体分为多个实体,但相互之间仍
通过共同的边界连接在一起。 若想找到两条相交线的交点并保留这些线时,此 命令特别有用,如下图所示. (交运算可以找到交 点但删除了两条线)
布尔运算
加
把两个或多个实体合并为一个.
粘接
布尔运算
把两个或多个实体粘合到一起,在其接触面上具
有共同的边界 当定义两个不同的实体时特别方便(如对不同材 料组成的实体)
搭接
布尔运算
类似于粘合运算,但输入的实体有重叠.
减
布尔运算
删除“母体”中一块或多块与子体重合的部分。
对于建立带孔的实体或准确切除部分实体特别方
4、建模(Modeling)
4.1定义正方形 Preprocessor-modelingcreate-areas-rectangleby dimensions-弹出 create-rectangle by dimensions对话框,在对 话框中输入正方形左右角 坐标值(0,0.5)、 (0,0.5)-ok,完成正方 形定义。
便.
叠分
布尔运算
把一个实体分割为两个或
多个,它们仍通过共同的 边界连接在一起. “切割工具” 可以是工作 平面、面线甚至于体. 在用块体划分网格时,通 过对实体的分割,可以把 复杂的实体变为简单的体.
相交
布尔运算
只保留两个或多个实体重叠的部分. 如果输入了多于两个的实体,则有两种选择: 公共
(3)对ox面,载荷对称,则反对称位移分量v=0,
因此,在ox面上只有x方向的移动位移,y方向不能 移动,故可用铅锤放置的滚动铰支座表示该对称面 上的约束情况;对oy面,载荷对称,则反对称位移 分量u=0,因此,在oy面上只有y方向的移动位移,x 方向不能移动,故可用水平放置的滚动铰支座表示 该对称面上的约束情况;
应用ANSYS求解平板问题的实例
(1)正方形带孔平板,正 方形边长为1m,小孔直径
为0.1m,板厚为0.05m。弹
性模量为2.1e+11,泊松比 为0.3。上下边受均匀压力 1000N,模型如下图所示。
(2)上述平板有A、B两种材料组成,中间套有直径为 0.2m的圆环,材料为弹性模量为1.9e+11,泊松比为 0.3。模型如下图所示。
单击plotctrls菜单中 numbering命令,选中area numbers复选框-ok;面元素 的编号均显示在图中,且各 元素的颜色不同。 依次单击preprocessormodeling-delete-area and below,弹出delete area and below 对话框,在窗口中选 中A3-ok,即可删除A3,删除 后的模型如图所示。
4.2 定义圆(即小孔)
依次单击preprocessor-
modeling-createareas-circle-solid circle, 弹出solid circular area 对话框,输入半径0.05 (不填数据为0默认值) -ok; 注意:apply与ok的区别。
4.3生成孔
依次单击preprocessormodeling-operatebooleans(布尔运算)subtract(减)-areas(对面 元素操作),弹出substract areas对话框,如图所示。 首先在窗口中单击正方形 (呈粉红色,若错选,单击 reset复位)-apply(相当于 减操作)-单击圆-ok,完成 模型的初步建立。