激光雷达成像技术(3)
激光雷达综述
激光雷达技术与其应用综述一、激光雷达的概念激光雷达(LIDAR-Light Detected And Ranging )是一套复杂的光机系统,它结合了光源、光电探测等技术,有时还包括计算机图象处理技术,能够同时获得方位、俯仰角度、距离、强度等信息,特别适合用于森林结构的估计、城市建设、工业、农业、航空航天等领域[1]。
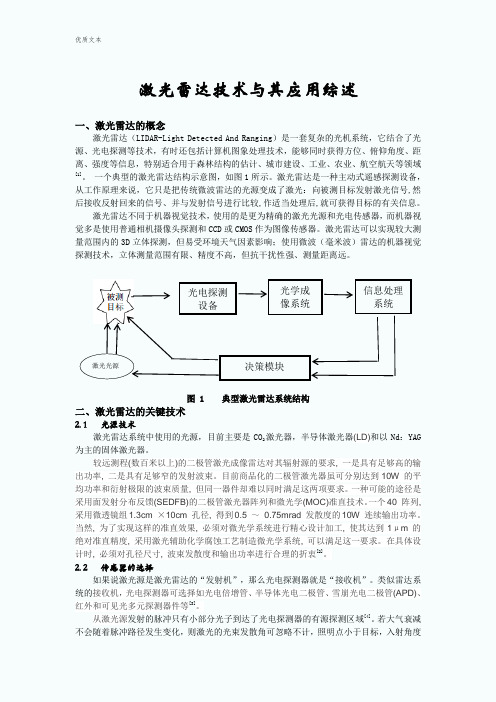
一个典型的激光雷达结构示意图,如图1所示。
激光雷达是一种主动式遥感探测设备,从工作原理来说,它只是把传统微波雷达的光源变成了激光:向被测目标发射激光信号,然后接收反射回来的信号、并与发射信号进行比较,作适当处理后,就可获得目标的有关信息。
激光雷达不同于机器视觉技术,使用的是更为精确的激光光源和光电传感器,而机器视觉多是使用普通相机摄像头探测和CCD 或CMOS 作为图像传感器。
激光雷达可以实现较大测量范围内的3D 立体探测,但易受环境天气因素影响;使用微波(毫米波)雷达的机器视觉探测技术,立体测量范围有限、精度不高,但抗干扰性强、测量距离远。
图 1 典型激光雷达系统结构二、激光雷达的关键技术2. 1 光源技术激光雷达系统中使用的光源,目前主要是CO 2激光器,半导体激光器(LD)和以Nd :YAG 为主的固体激光器。
较远测程(数百米以上)的二极管激光成像雷达对其辐射源的要求, 一是具有足够高的输出功率, 二是具有足够窄的发射波束。
目前商品化的二极管激光器虽可分别达到10W 的平均功率和衍射极限的波束质量, 但同一器件却难以同时满足这两项要求。
一种可能的途径是采用面发射分布反馈(SEDFB)的二极管激光器阵列和微光学(MOC)准直技术。
一个40 阵列, 采用微透镜组1.3cm ×10cm 孔径, 得到0.5 ~ 0.75mrad 发散度的10W 连续输出功率。
当然, 为了实现这样的准直效果, 必须对微光学系统进行精心设计加工, 使其达到1μm 的绝对准直精度, 采用激光辅助化学腐蚀工艺制造微光学系统, 可以满足这一要求。
激光雷达成像原理
激光雷达成像原理
激光雷达成像技术是一种以激光束作为被测物体的能量源来检
测物体的一种测量技术,它主要利用激光束照射被测物体,检测反射回来的激光束,以及返回激光束的外观、振动、位置等信息来分析物体的状态,从而获得物体的信息。
激光雷达成像技术是一种无接触式的检测方式,它不需要用户触碰物体也能够准确测量物体及其特征,这是与传统测量方式最大的区别。
此外,激光雷达还具有成本低、快速、精确度高等特点。
激光雷达成像的基本原理是:发出的激光束照射到被测物体的表面,表面反射的激光束会被接收器检测到,并且无论是位置、振动信息,还是外观信息等,也都会被检测到,从而得到物体的详细信息。
接收器接收到的激光信号可以用来判断被测对象的位置、大小、形状等特征,还可以用来识别物体是否有变形等。
激光雷达成像技术可以用在许多不同的领域,比如工业生产线的质量检测、机器人抓取、安防监控系统、自动驾驶系统、运动控制系统等。
例如在机器人抓取时,激光雷达成像技术可以有效提高机器人的抓取精度,从而使其能更快速、准确地完成抓取任务;在安防监控中,激光雷达的指纹识别技术可以用来有效地检测并识别出被检测物体的指纹和表面特征,从而实现更准确的安防监控;在自动驾驶系统中,激光雷达成像技术可以用来准确测量周围环境和物体的距离,以实现对自动驾驶车辆的识别和定位。
总之,激光雷达成像技术是一种具有革命性意义的技术,它已经
被广泛应用于许多不同的领域,从简单的安全检测到更复杂的运动控制系统,激光雷达的应用场景非常广泛,具有极大的发展潜力。
DEM数据获取方法资料
DEM数据获取方法资料DEM(Digital Elevation Model)数字高程模型是通过测量和计算地球表面的高程数据而生成的一种地形表面的模型。
DEM数据广泛应用于地形分析、地貌与水文模拟、三维可视化、地球科学研究、环境规划等领域。
获取DEM数据的方法主要有空间遥感技术、测绘技术和数值高程模型。
一、空间遥感技术获取DEM数据1.激光雷达(LiDAR)技术:激光雷达技术通过激光的脉冲反射来测量地表的高程,能够高精度地获取地形数据。
激光雷达设备搭载在航空器或地面车辆上,通过扫描地面并记录雷达返回的信号,高效地获取大面积DEM数据。
2.雷达干涉(InSAR)技术:雷达干涉技术利用合成孔径雷达成像来测量地表的形变和高程变化。
通过使用两个或多个雷达图像,可以计算地表的高程信息,并生成DEM数据。
这种技术可以应用于大面积的地表变形监测和地形测量。
3.卫星测高:卫星测高技术通过卫星载荷接收和处理地表的雷达回波信号,测量地表的高程,并生成高精度DEM数据。
这种方法适用于获取大范围的DEM数据,但精度相对较低。
二、测绘技术获取DEM数据1.地面测量:地面测量是通过在地面上放置测量仪器,通过测量角度、距离和高程来获取地表的高程信息。
常见的地面测量方法包括全站仪、GPS测量等,可以获取高精度的局部DEM数据。
2.摄影测量:摄影测量是通过航空或航天平台上的相机拍摄地面的图像,并通过图像处理和测量方法来推算地表的高程信息。
该方法适用于中等精度的大范围DEM数据获取。
3.地形测绘:地形测绘是通过现场勘测和测量获取地形数据,包括通过地形测图、地形描图和地形探测来获得地表高程数据。
这种方法适用于小范围和高精度的DEM数据获取。
三、数值高程模型获取DEM数据1.数学建模:数学建模是通过现有地表高程数据进行数学建模和插值方法来推算出没有测量点的地表高程数据。
常用的数学建模方法包括三角网格插值、反距离权重插值等,可以较好地还原地表的高程。
成像激光雷达技术概述

成像激光雷达技术概述想象一下,一辆无人驾驶汽车在繁忙的都市中自由穿梭,智能地避让行人、车辆,准确地判断路况,安全地到达目的地。
这一切都离不开一种神秘的技术——成像激光雷达技术。
成像激光雷达技术是一种通过发射激光并接收反射信号,快速获取目标物体详细信息的技术。
它具有高精度、高速度、高分辨率等优点,成为无人驾驶、智能交通等领域的关键技术之一。
成像激光雷达技术的原理可以归结为“激光雷达扫描”。
首先,激光发射器会发射出一定波长的激光束,光束经过光学系统后,会形成一定的光路。
随后,激光束打到目标物体上,并反射回来。
反射信号被接收器捕获后,通过高速数据处理器进行处理,最终形成具有高清晰度的三维图像。
成像激光雷达技术具有以下特点:1、精度高:激光雷达的测量精度远高于传统的传感器,能够清晰地识别出目标物体的形状、大小和距离等信息。
2、速度快:激光雷达的扫描速度非常快,能够在短时间内获取大量数据,从而实时更新目标物体的位置和姿态。
3、成本适中:相较于其他高级传感器,成像激光雷达技术的成本较为适中,适合大规模应用和推广。
4、抗干扰性强:激光雷达的信号为定向光束,不易受到环境光的干扰,保证了测量的稳定性和准确性。
成像激光雷达技术在各类应用场景中都有着广泛的实际应用。
在智能交通领域,成像激光雷达技术能够实时监测道路状况、车辆流量等信息,为智能交通管理系统提供重要依据。
在无人驾驶领域,成像激光雷达技术可以帮助车辆进行精确的障碍物识别、路径规划以及自主导航,提高无人驾驶的安全性和可靠性。
此外,成像激光雷达技术在无人机、机器人等领域也有着广泛的应用,能够实现自主导航、环境感知等功能。
未来,成像激光雷达技术将继续发挥其重要作用。
随着技术的不断进步,激光雷达的扫描速度、分辨率和可靠性等方面将得到进一步提升。
随着5G、物联网等技术的快速发展,成像激光雷达技术将在更广泛的领域得到应用,例如智慧城市、安全监控等。
此外,随着和机器学习等技术的不断发展,成像激光雷达技术将能够实现更高级别的自动化和智能化。
dtof和itof成像原理

dtof和itof成像原理DTOF(Direct Time of Flight)和ITOF(Indirect Time of Flight)是两种常见的激光雷达成像原理。
它们都是利用激光束在目标表面上的反射来测量距离的技术。
下面我将从多个角度来解释它们的成像原理。
首先,我们来看DTOF成像原理。
DTOF技术通过测量激光脉冲从发射到接收所需的时间来计算目标物体的距离。
当激光脉冲被发射后,它会照射到目标表面上并被反射回来。
接收器会记录激光脉冲的返回时间,并根据光速和时间来计算出目标物体的距离。
这种方法可以实现高精度的距离测量,因为它直接测量了激光脉冲的往返时间。
接下来是ITOF成像原理。
ITOF技术则是通过测量激光脉冲的相位变化来计算目标物体的距离。
在ITOF系统中,激光脉冲被发射并照射到目标表面上,然后被反射回来。
接收器会记录激光脉冲的相位变化,并根据相位变化来计算出目标物体的距离。
相较于DTOF,ITOF技术可以实现更快的测量速度和更高的分辨率,因为它利用了激光波的相位信息。
除了以上两种成像原理,还有其他一些技术也可以用于激光雷达成像,比如混合式的技术。
在混合式系统中,DTOF和ITOF技术可以结合使用,以充分利用它们各自的优势,从而实现更精准和高效的距离测量。
总的来说,DTOF和ITOF都是基于激光脉冲往返时间或相位变化来实现距离测量的技术。
它们在实际应用中有着各自的优势和局限性,选择合适的技术取决于具体的应用场景和需求。
希望以上解释能够全面地回答你关于DTOF和ITOF成像原理的问题。
激光成像技术的发展和应用

激光成像技术的发展和应用随着科技的不断发展,激光成像技术已经逐渐成为了一个热门的话题。
这种技术基于激光器的原理,利用激光束来反射图像,并进行计算分析。
在现代的许多领域中,激光成像技术都得到了广泛的应用。
未来,随着科技的不断进步,现有的激光成像技术将会得到更加完善,甚至会出现全新的技术,从而引领行业不断地发展。
一、激光成像技术的分类激光成像技术包含了许多不同的种类。
根据激光光源和成像方式的不同,可以将它们划分为以下四类:激光雷达成像技术、光学显微镜成像技术、基于空间和功率的激光成像技术以及太赫兹波成像技术。
激光雷达成像技术是一种从外部获取3D空间数据的技术。
它利用激光束发射并照射到物体表面,然后通过测量激光束的回波时间来计算出物体的距离信息和形状信息。
光学显微镜成像技术则是用来观察非常微小的生物分子和细胞的一种技术。
它基于激光束穿透样品并打印到接收器上的原理来获取高清晰度的图像。
基于和空间和功率的激光成像技术可以分为两个子类。
其中基于空间的技术利用激光束形成各种空间模式,用于变换成像策略或者信息编码方案。
而基于功率的技术则是利用激光的高能量来击碎物质样本,然后再通过分析产生的碎片来获得图像。
最后,太赫兹波成像技术则是利用太赫兹波辐射和探测器来获取特定物质样品的图像。
这种技术通常用于材料分析、非接触安检或者医学成像。
二、激光成像技术的应用激光成像技术在现代的许多领域中都得到了广泛的应用。
下面列出其中的一些:1. 农业随着农业技术不断地发展,激光成像技术开始在这个领域中发挥作用。
农业机器人可以利用激光雷达进行土地测绘和作物分析,以提高农作物的种植质量和生产效率。
2. 医学激光成像技术在医学成像中也得到了广泛的应用。
例如,光学显微镜成像技术可以用于定量分析某些生物结构,帮助确定疾病的程度。
此外,激光雷达在眼科和普通外科手术中也发挥了重要作用。
利用激光以极高的精度和控制度切除病变组织并促进伤口愈合速度。
3. 地质勘探基于空间和功率的激光成像技术可以用于地质勘探。
激光雷达技术

激光雷达技术
“雷达”是一种利用电磁波探测目标位置的电子设备.电磁波其功能包括搜
索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散
射截面和形状等特征参数。
传统的雷达是微波和毫米波波段的电磁波为载波的雷达。
激光雷达以激光作为载波.可以用振幅、频率、相位和振幅来搭载信息,作为信息载体。
激光雷达利用激光光波来完成上述任务。
可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。
还可以采用相干接收方式接收信号,通过后置信号处理实现探测。
激光雷达和微波雷达并无本质区别,在原理框
图上也十分类似,见下图
激光雷达是工作在光频波段的雷达。
与微波雷达的原理相似,它利用光频波段的电磁波先向目标发射探测信号,然后将其接收到的同波信号与发射信
号相比较,从而获得目标的位置(距离、方位和高度)、运动状态(速度、姿态)
等信息,实现对目标的探测、跟踪和识别。
激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。
激光光速发散角小,能量集中,探测灵敏度和分辨率高。
多普勒频。
分析激光雷达的三维成像方法
分析激光雷达的三维成像方法激光雷达是一种能够利用激光束进行高精度测量和三维成像的仪器,已经在许多领域得到了广泛的应用。
在这篇文章中,我们将介绍激光雷达的三维成像方法,并分析其原理和优缺点。
激光雷达的三维成像方法主要可以分为两类:主动式成像和被动式成像。
主动式成像是指激光雷达主动地向目标物体发射激光束,然后测量其返回的激光信号来获取目标物体的三维信息。
被动式成像则是通过接收来自外部光源(如太阳光)的光线,通过分析光线经过目标物体后的散射模式来获得目标物体的三维形状。
主动式成像方法中最常用的是时间差法和相位差法。
时间差法是利用激光束往返的时间与光速的关系来测量目标物体与激光雷达之间的距离。
具体来说,激光雷达发射一束短脉冲的激光,计算激光从发射到返回所经过的时间,再乘以光速即可得到目标物体与激光雷达之间的距离。
相位差法则是利用激光返回时的相位差来计算距离。
这种方法在测量精度方面更高,但要求激光雷达具备高频率的激光发射器。
被动式成像方法中最常用的是结构光法和多视角法。
结构光法利用一个具有特定模式的光源(如激光投影仪)投射光线到目标物体上,通过观察光线经过目标物体后的散射模式来推导目标物体的三维形状。
多视角法则是通过同时从不同位置观察目标物体,从而获得多个角度的图像,然后结合这些图像来重构目标物体的三维形状。
这种方法常用于立体视觉中,可以实现较高的测量精度。
不同的三维成像方法各有优缺点。
主动式成像方法在测量距离方面具有较高的精度,并且可以在任何光照条件下工作。
然而,它需要激光雷达具备高速激光发射和接收的能力,且对目标物体的反射和散射能力有一定要求。
被动式成像方法则无需激光发射器,可以利用周围光源进行测量,且在测量速度和实时性方面较好。
但是它对环境光照条件有一定的要求,并且由于光线的散射和衍射效应,可能导致一定的测量误差。
总体而言,激光雷达的三维成像方法在测量和建模方面具有很高的精度和准确性,已经在许多领域得到了广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
距离选通激光成像雷达
Burst illuminations Ladar (BIL)
航天学院
距离选通激光成像雷达
激光测距仪+扫描仪+数字相机 距离范围:3~800m 距离分辨率:厘米量级 波长:1.5µm 航天学院
热像仪图像
BIL图像 航天学院
航天学院
闪烁式激光成像雷达
1. 机载激光成像雷达 2. 测距方式:TOF 3. 面阵探测器:给出目标的角度和距离 4. 盖革模式雪崩二极管(GM-APD)是其核心技术
.
θ=
dθ ×τ = dt
2
dθ nr dt c
其中:θ-滞后角;dθ/dt-扫描速率;τ-往返时间;r-到目标距离;c-光 速;n-传播介质平均折射率
航天学院
航天学院
航天学院
Model 6400 Moving Coil Capacitive Position Detector Optical Scanner
100-µm µ
– –
Bump-Bonded InGaAsP APDs
3. CMOS 计时电路t
– – 250 - 500-ps 时间分辨率 500 MHz and 1-GHz 时钟
航天学院
GM-APD 阵列 CMOS 计时电路
航天学院
Opus Microsystems Corp. Taipei, Taiwan, 2D MEMS
航天学院
mirrorcletech
No Mirror Model No Mirror Diameter (mm) 1 S0103 0.8 Frequency (Hz) 10552/ 10874 2 3 4 5 S0264 S0394 S0233 S0273 1.2 2.0 2.4 3.4 2017/1987 935/907 623/629 531/529 7.2186 7.4309 7.1093 7.6862 127 134 134 140 Opt.Scan angle (°) 6.1954 Max.Voltage (V)
航天学院
航天学院
激光雷达常见的性能指标
1. 最大辐射功率 2. 水平视场“ horizontal Field of View (FOV)” 3. 垂直视场“ vertical FOV” 4. 光源波长“Wavelength of optical source” 5. 最远测量距离“Maximum distance to be measured” 6. 测量时间/帧频“ Measurement time / frame rate” 7. 纵向分辨率“depth resolution “ 8. 角分辨率“angular resolution” 9. 测距精度“Range Measurement accuracy”
Jigsaw image of helicopte视场角 波长 激光远场光束图样 激光脉宽 激光脉冲和成像速率 接收孔径 有效焦距 F数 焦平面像素 纵向设计100µm像素 瞬时斜距采样 视场FOV(32×32) 距离分辨率 FPA采样率 瞬时视场
数值 150m 10.8° 532nm 32×32点阵 300ps 16000/s 7.5cm 300mm f/4.0 32×32 333µrad 在150m处为5cm 10.1×10.1mrad 40cm 2GHz 10.1×10.1mrad
3-5 km 10 mm 5 cm 20º x 20º 500 µrad 8-10 kpoints/s < 10 kg, < 70 W, < 13 L Class 3B Range, bearing, centroid
航天学院
Micro electro-mechanical system (MEMS) 航天学院
Maximum range Range resolution Range accuracy at 50 m FOV (Field of View) Laser beam divergence Data rate Instrument mass, power, volume Laser (eye-safety) Data output
APD/CMOS 时间记录阵列
Bridge-Bonded Si APDs
1. Silicon APDs for λ < 0.9 µm
– – – 20-50 % 探测效率 10-kHz 暗光子技术率 桥接 CMOS 计时
2. InGaAsP/InP APDs for λ 1~ 1.5 µm
– 20-50%探测效率 ~10-kHz暗光子技术率TE-cooling (1 µm ) 桥接 CMOS 计时
其中:Ωtot-总扫描角; Ωtot-光束发散角;Tdwell=1/fr-光束滞留时间 飞行时扫描频率:
f scan = V d res N
V—高度H(m)的飞行速度;N=m×n—探测器单元数量; dres—探测器面元尺寸
航天学院
扫描时脉冲积累数:
θB fr n= 6ωm
其中:θB-天线3dB光束宽度(deg);fr-重频;ωm-天线每分转数 瞄准误差与滞后角效应:
激光雷达成像技术(3)
航天学院
成像技术要点
1. 距离测量技术 – 直接飞行时间“Direct Time-of-Flight (TOF)” – 连续波振幅调制的相位“Phase-Based AM-CW” – 连续波振幅啁啾调制“Chirped AM-CW “ – 连续波频率啁啾调制“Frequency chirp (FM-CW)” 2. 成像方式 – 扫描成像(X-Y扫描、线扫描、MEMS或DMD扫描) – FLASH成像(焦平面成像) – 条纹相机成像 – 距离选通成像 – 相控阵成像 – 合成孔径成像
注释
在距离150m处直径为28.3m
按探测器瞬时视场点阵排列 半宽度
<7.5m
>7.5m 500GHz 在150m处为1.5m正方形
航天学院
2003年6月该Jigsaw系统装在UH-1 直 升机上进行了飞行实验 隐蔽在树林中带伪装网的坦克目标
航天学院
飞行实验中获取的坦克目标的伪彩色3D 激光雷达图像处理过程显 示
航天学院
脉冲飞行时间测量法(1)
图-1纯脉冲飞行时间物理过程
航天学院
连续波幅度调制相位测量法
图-2 飞行时间决定相位的物理过程
航天学院
相位差与距离关系
模糊距离
∆r =
λAM
2
=
c 2FAM
信噪比与测距精度
举例1
航天学院
连续波啁啾幅度调制测量法
∆F-调制深度 T-调制周期 fif -中频
啁啾调制信号与中频信号图示
航天学院
APD的工作模式
1. 线性模式 工作电压接近并小于雪崩电压时,M到1000左右就会饱和,这样的 倍增还不足以探测到单光子信号; 2. 盖革模式 工作偏压大于雪崩电压时,光子信号APD吸收,并使APD迅速雪崩 ,同时采用一定的抑制电路(无源抑制、有源抑制和主动门抑制 ),迅速切断雪崩,使APD恢复到接收光子的状态。
4.2×4.2mm ×
0.7×0.7mm~2.0 ×2.2mm × 航天学院
航天学院
The Sick LMS 200 laser scanner
Implementation of a Risley prism scanner for an FPA staring array LADAR. 航天学院
航天学院
扫描成像
航天学院
平行光束扫描
会聚光束扫描
θ≈
2(b + c )γ a+b+c
θ=
2γ
α
航天学院
航天学院
脉冲重复频率 fr:
fr = N × F
其中:N (m ×n)-像素;F-帧频 总的扫描时间:
Ttostsc − st
Ω tot = Ω beam
Tdwell
航天学院
航天学院
航天学院
Block diagram for an experimental single channel (2-D) chirped-AM/cw LADAR
航天学院
连续波频率啁啾调制测量法
航天学院
Frequency chirp (FM-CW) used in the Metric Vision MV-200 coherent Ladar.
航天学院
盖革模式淬灭电路
被动淬灭
主动淬灭
航天学院
GM-APD:光子/数字转换
单元 焦平面
photon CMOS array APD array
APD
Digital timing circuit
Digitally encoded photon arrival time Lenslet array
航天学院
航天学院
航天学院
先進微系統科技(股)公司2D-MEMS
Preliminary Spec's Scan speed (fast axis) Scan speed (slow axis) Mirror plate size Optical scanning angle Scan trajectory (fast axis) Scan trajectory (slow axis) Scan jitter Reflectivity Mirror flatness Operating temperature Operating humidity Acoustic noise Driving principle Power consumption Package footprint Package Status PE100011 10 kHz 1.15 kHz 1.2 mm Circular ±15o / ±12o sinusoidal sinusoidal < 0.1% > 80% @ 450~650nm < λ /8 @ 635nm 0o~60oC 10%~85% < 30dB electrostatic < 40 mW 10x10 mm2 PLCC Engineering sample PF210012 21 kHz 1.2 kHz 0.9 mm Circular ±15o / ±15o sinusoidal sinusoidal < 0.1% > 80% @ 450~650nm < λ /8 @ 635nm 0o~60oC 10%~85% < 30dB electrostatic < 100 mW 8x8 mm2 PLCC Engineering sample PE200012 20kHz 1.2 kHz 1.0 mm Circular ±15o / ±15o sinusoidal sinusoidal < 0.1% > 80% @ 450~650nm < λ /8 @ 635nm 0o~60oC 10%~85% < 30dB electrostatic < 100 mW 8x8 mm2 PLCC Engineering sample PE210012 21 kHz 1.2 kHz 1.0 mm Circular ±15o / ±15o sinusoidal sinusoidal < 0.1% > 80% @ 450~650nm < λ /8 @ 635nm 0o~60oC 10%~85% < 30dB electrostatic < 100 mW 8x8 mm2 PLCC Engineering sample