弧焊机器人大臂结构模态分析
五轴弧焊机器人传动机构的设计

五轴弧焊机器人传动机构的设计与分析戚松制造学院 0743021004摘要:本文总结并具体应用了示教、再现(T/P)式全电动多关节型五轴弧焊机器人传动机构的设计原则以及各关节传动机构的若干实用可行的设讣方案,并进行了分析比较。
1.引言设计T/P式具有点位控制(PTP)、连续控制(CP)功能的全电动多关节型五轴弧焊机器人本体的关键问题之一就是传动机构的设计。
本文将详细介绍其传动机构的设计原则,并具体应用于各关节传动机构设计和分析的若千方案。
2.弧焊机器人简介及其传动机构的总设计原则弧焊机器人持重只有10k g左右,重复精度应±0.2mm为佳,焊接速度范围大约需要0.2~ 2 m/min,高速移动时的速度达60m/min左右,T/P式,具有PTP、CP控制功能,目前国内主要应用的驱动器有直流和交流伺服电机(以下用M表示),主要应用的减速方式是谐波减速器(以下用R表示)、滚珠丝杠副、行星齿轮机构、齿轮及蜗轮蜗杆传动;本体主要由机身回转(RT自由度),上臂俯仰(UA自由度)、前臂俯仰(FA自由度)、手腕回转(TW自由度)和手腕上下摆动(BW自由发)构成。
为了满足焊接作业和控制对弧焊机器人本体的基本要求,在传动机构的设计中应着重保证:①足够高的传动精度和刚度;②传动平稳,噪音小;⑧偏重力矩小,运动部分重量轻,惯量小;④摩擦小,传动效率高;⑤总体布局合理,造型美观;⑥成本低,经济性好。
下面将应用这些总设计原则,具体分析各关节传动机构的重点设计要求,并据此设计和分析若干传动方案。
3.机身回转传动机构的设计与分析机身是直接支承和传动手臂的部件,承载重且受力情况复杂,转动惯量及其变化幅度大,误差放大比最大。
因此,高旋转精度和刚性是机身设计时应首先予以保证。
方案一 M1经R1直接驱动RT轴(图1 )。
方案二参见图1。
M1经摆线行星轮减速器直接驱动RT轴。
方案三图2所示,M1经同步齿形带、R1驱动RT轴。
方案四如图34。
六自由度弧焊机器人毕业设计论文

摘要机器人是一种集机械、电子、传感技术、控制技术等多种现代技术于一体的机电一体化产品。
进入80年代,随着自动化生产流水线以及柔性生产系统(FMS)和柔性自动化(FA)在工业生产中的大量应用,机器人发挥着越来越重要的作用。
机器人的特点是能在自动控制下通过编程完成目标操作或移动作业;机器人的构造和性能体现了人和机器各自的优点,特别是体现了人的智能和适应性以及机器的作业准确性和在各种环境中完成作业的能力。
综观机器人发展的历史和高新技术的发展趋势,可以断言,机器人必将成为现代化工业发展中不可缺少的必备工具。
本文设计了一种关节式机器人,具有六个自由度,其中手腕关节具有三个自由度,其它的关节各具有一个自由度,各个关节采用电机驱动。
本设计主要介绍关于机器人的一些基本常识和原理,包括机器人的组成、分类和主要技术性能参数并参考通用型机器人的结构,进行六自由度弧焊机器人的结构设计和其计算机控制系统的设计。
本设计从实际情况出发,对机器人的机构可行方案进行了充分论证,用Pro/Engineer 和AutoCAD 等软件设计出了机器人本体结构。
关键词: 六自由度;弧焊机器人;控制系统ABSTRACTThe robot is the mechanical-electrical production which is composed of the technique of mechanical、electrical、sensor、control. Coming the 80 age, with the application of the automatic manufacture pipelining、flexible manufacture system and flexible automation, the robot will exert the profound influence on this. A characteristic of the robot is its ability to complete object manipulation or moving task through programming under the auto-control. The constitution and performance of the robot embody each quality of the man and robot, especially the man’s intelligence and applicability as well as the veracity of the robot’s task and the ability of completing task under each environment.A joint type robot was designed in this paper.It had six degrees of freedom.The wrist had three degrees of freedom and the other joints had three degrees of freedom.The painting robot’s joints were driven by motors.This scheme introduced some basic information and theory of the robots. It is included that the composition of the robot, the group of the robot, and the main capability of technology. It consulted the structure of the common robot to design the structure and computer control system of six degrees of freedom robot. After demonstrating the feasibility of robot mechanics, the artic le have designed the robot’s entity structure with Pro/engineer and AutoCAD and otherwise software from the matter of fact.KEYWORDS:Six degrees of freedom;Arc welding robot;Control system目录摘要 ................................................................................... 错误!未定义书签。
基于SolidWorks软件对工业机器人机械臂的结构优化设计和受力、模态分析
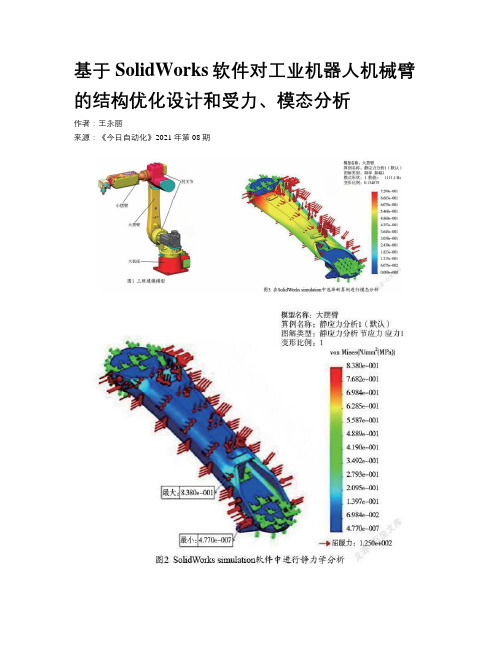
基于SolidWorks软件对工业机器人机械臂的结构优化设计和受力、模态分析作者:王永丽来源:《今日自动化》2021年第08期[摘要]随着现在软件技术的发展,三维建模、仿真软件越来越普及化,SolidWorks软件由其界面操作简单、功能强大被机械设计行业广泛应用,采用SolidWorks软件对某工业机器人机械臂的三维模型结构进行拓扑优化设计,采用SolidWorks simulation软件对机械臂进行静力学、模态仿真分析,几何清理和网格划分,通过计算,设计出较合理的肘关节减速机传动齿轮;达到了工业机器人机械臂高精度柔性运动,机械臂高强度、刚度、最小安全系数和减小应力集中的效果,解决了工业机器人机械臂的优化设计。
[关键词]SolidWorks;工业机器人;机械臂; 仿真分析; 优化设计[中图分类号]V279 [文献标志码]A [文章编号]2095–6487(2021)08–0–03[Abstract]With the development of software technology, three-dimensional modeling and simulation software are becoming more and more popular. SolidWorks software is widely used in mechanical design industry because of its simple interface operation and powerful function. SolidWorks software is used to optimize the topology of the three-dimensional model structure of anindustrial robot manipulator, and SolidWorks simulation software is used to optimize the statics and dynamics of the manipulator Through modal simulation analysis, geometric cleaning and mesh generation, a more reasonable transmission gear of elbow reducer is designed through calculation; It achieves the effect of high-precision flexible motion, high strength, stiffness, minimum safety factor and reducing stress concentration of industrial robot manipulator, and solves the optimization design of industrial robot manipulator.[Keywords]SolidWorks; industrial robot; robot arm; simulation analysis; optimal design工业机器人机械手臂由三部分组成,分别是机械部分、传感部分、控制部分。
一种机器人大臂机构的结构优化

( 内蒙古 科技大 学 , 包头 0 4 1 ) 10 0
Stu t r p i z n ft e b s r o h o o rcu e o t miig o h a e a m f e r b t t
B h ojn TA a O S a-u , I N J n u
;进行联合估计, 最后通过外场试验验证了 算法的有效性和正确性。 l 关键词: 故障检测; 水下机器人; 无色卡尔曼滤波器 ’
l l
【 bt c】U m ne n e a r e ie ed t cm let i i i t r vnwt u A s at n andu dr t h l nes o o pe ems o wt lt o ee iot r w ev c t h sn h ie l h
I n rMo g l ie s yo ce c n e h oo y B oo 1 0 0, hn ) n e n oi Un v ri f in ea dT c n lg , a tu0 4 1 C i a a t S
【 摘 要】 针对机器人大臂机构中存在的个别构件强度不足、 安全 『 生 不够, 以及其它一些构件强度、 刚 度储备过大, 造成整体结构过于笨重等问题 , 利用有限单元法对各构件进行变厚度分析 , 得到厚度与强度
; 【 摘 要】 机器人需 . 水下 要在无人干 预或者少量干预的情况下自 主地完 成使命, 这就要求它在作业 l l过程中 能够自 主地检测子系统、 传感器 和执行器的故障。 在确认发生故障的时 它还需 候, 要尽最大可能
地进行修复 , 以确保使命的顺利进行 。 水下机器人常用的执行器包括推进器、 机械手等, 舵、 针对推进器 的故障检测问题 , 首先建立 了水下机器人的运动学和动力学模型 , 然后采用 U F对 系统的状态和参数 K
管道焊接机器人行走机构的ANSYS模态分析

西南石油大学机电工程学院 610500 成都
摘 要 本文分析了管道自动焊接机器人行走机构的固有振动特性。采用
三维制图软件创建行走机构模型,通过
有限元软件 对其进行模态分析,得到机构的低阶固有频率及主振型为焊接机器人的动态设计提供参考。
关键词 行走机构 模态分析 固有频率 主振型
当今世界,管道运输与铁路运输、公路运输、航空运输、 水路运输并称五大运输业。运用管道输送水、原油、成品油、天 然气等流体物质,拥有输量大、距离长、安全性高、成本低等优 点,因此管道运输业得以在世界范围内迅速发展。然而管道施工 现场环境恶劣、焊工劳动强度大、焊接效率低,这些因素都大大 制约了管道施工的效率。故国内外有实力的管道建设公司均着力 于研发优质、高效的自动焊接系统,以提高焊接质量、降低劳动 强度和施工成本。
(收稿日期:2013-03-22)
(接197页)参考文献 [1] 相里志强.医学中职学校计算机应用基础课程教学改革探
讨.卫生职业教育,2009,08
[2] 崔兰超.中职学校非计算机专业计算机教育之我见.2012,7 (收稿日期:2013-03-07)
,这种
单元结构在保证精度的同时允许使用不规则的形状。定义材料属
性为铝合金,弹性模量为
,泊松比0.33,密度
。
由于三维软件创建模型,其长度单位为mm,因此
第七讲机器人的机械臂结构课件

三、典型机械臂结构
1.手臂直线运动机构
常见方式:
行程小时:采用油缸或气缸直接驱动;
当行程较大时:可采用油缸或气缸驱动
齿条传动的倍增机构或采用步进电机或 伺服电机驱动,并通过丝杆螺母来转换 为直线运动。
典型结构:
油缸驱动的手臂伸缩运动结构 电机驱动的丝杆螺母直线运动结构
油缸—齿条机构图例:
油缸驱动的手臂伸缩运动结构图例:
四根导向柱 的臂部伸缩 机构:
手臂的 垂直伸缩运 动由油缸3 驱动。
特点:
工作行程长, 抓重大,适 合于抓举工 件形状不规 则、有偏转 力矩的场合。
1—手部 2—夹紧缸;3—油缸;4—导向柱;5—运行架;6—行走车轮; 7—轨道;8—支座
电机驱动丝杆螺母直线运动结构图例:
关节型机器人传动 系统图:
关节型机器人腕部旋转 局部图:
电机M5→减速器R5→链轮 副 C5→锥齿轮副G5→旋转运动n5
关节型机器人腕部俯仰 局部图:
电机M4→减速器R4→链轮副 C4→俯仰运动n4
关节型机器人肘关节
局部图:
电机M3→两级同步带传动B3、 B3′→减速器R3→肘关节摆动n3
关节型机器人肩关节 局部图例:
电机M2→同步带传 动B2→减速器R2→肩 关节摆动n2
四、机械臂的控制
1、伺服系统的分类
液压伺服系统
机械臂各关节的运动通常由液压伺服阀 控制液压缸实现。
电动伺服系统
机械臂各关节的运动通常由步进电机或 直流电机驱动。
伺服直线液压缸图例:
电动伺服控制系统图例:
作业:
1、设计三种机器人小臂相对于大臂的直线运动方案,动力源为电机 驱动,用示意图表达。 2、画出型号为20a的工字钢的截面形状,并标注出有关几何参数。 3、解释液压伺服系统和电动伺服系统的组成及工作原理。
焊接机器人机构运动学分析

目录1 绪论 (1)1.1选题的依据及意义 (1)1.2 研究现状及发展趋势 (2)1.3本课题的研究设计内容及方法 (4)1.4课题的完成情况 (5)2 焊接机器人机构运动学分析 (6)2.1运动学分析数学基础-齐次变换(D-H变换) (6)2.2 变换方程的建立 (7)2.3运动学分析处理方法 (9)2.4逆解过程 (10)2.5本章小结 (28)3结构设计 (30)3.1小车行走结构设计 (30)3.2 摆动关节电机选择 (36)3.3本章小结 (36)结束语 (38)致谢 (39)参考文献 (40)附录 (41)1 绪论1.1 选题的依据及意义这里介绍该课题的选题背景,以及完成该课题的意义。
1.1.1 选题的依据针对集装箱波纹板焊接自动化水平低的现状:目前用于焊接集装箱侧板与顶侧梁、底侧梁的自动焊专机,由于在焊接过程中,焊枪不能随波形的变化调整与焊枪速度的夹角(焊接工艺参数也未有变化),如图1.1所示,在直线段与在波内斜边段,焊接速度方向恒为水平向右,而焊枪与焊缝保持垂直,故焊枪与焊接速度的夹角不能保持恒定,直接导致在直线段的焊缝成形与在波内斜边段的焊缝成形不能保持一致,进而导致在直线段焊接与在波内斜边段焊接的焊缝的质量不一样,进而制约集装箱的生产质量[1]。
由于某些原因,没有上传完整的毕业设计(完整的应包括毕业设计说明书、相关图纸CAD/PROE、中英文文献及翻译等),此文档也稍微删除了一部分内容(目录及某些关键内容)如需要的朋友,请联系我的叩扣:二二壹五八玖一壹五一,数万篇现成设计及另有的高端团队绝对可满足您的需要.图1.1 集装箱波纹板示意图1.1.2 选题的意义通过完成该课题,即设计出集装箱波纹板三自由度焊接机器人及对其进行运动学分析,能够解决在焊接过程中焊枪不能随波形的变化调整与焊枪速度的夹角这个问题,使得在直线段与在波内斜边段焊接时,焊枪与焊缝都保持垂直,相对于焊缝的焊接速度都恒为同一速度,进而能够提高在直线段与在波内斜边段的焊缝成形的一致性,提高集装箱的生产质量。
工业机器人大臂的自由模态分析与研究
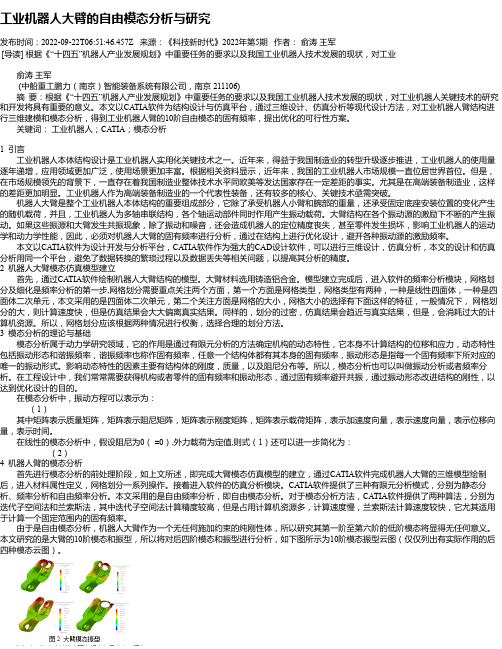
工业机器人大臂的自由模态分析与研究发布时间:2022-09-22T06:51:46.457Z 来源:《科技新时代》2022年第5期作者:俞涛王军[导读] 根据《“十四五”机器人产业发展规划》中重要任务的要求以及我国工业机器人技术发展的现状,对工业俞涛王军(中船重工鹏力(南京)智能装备系统有限公司,南京 211106) 摘要:根据《“十四五”机器人产业发展规划》中重要任务的要求以及我国工业机器人技术发展的现状,对工业机器人关键技术的研究和开发将具有重要的意义。
本文以CATIA软件为结构设计与仿真平台,通过三维设计、仿真分析等现代设计方法,对工业机器人臂结构进行三维建模和模态分析,得到工业机器人臂的10阶自由模态的固有频率,提出优化的可行性方案。
关键词:工业机器人;CATIA;模态分析1 引言工业机器人本体结构设计是工业机器人实用化关键技术之一。
近年来,得益于我国制造业的转型升级逐步推进,工业机器人的使用量逐年递增,应用领域更加广泛,使用场景更加丰富。
根据相关资料显示,近年来,我国的工业机器人市场规模一直位居世界首位。
但是,在市场规模领先的背景下,一直存在着我国制造业整体技术水平同欧美等发达国家存在一定差距的事实。
尤其是在高端装备制造业,这样的差距更加明显。
工业机器人作为高端装备制造业的一个代表性装备,还有较多的核心、关键技术亟需突破。
机器人大臂是整个工业机器人本体结构的重要组成部分,它除了承受机器人小臂和腕部的重量,还承受固定底座安装位置的变化产生的随机载荷,并且,工业机器人为多轴串联结构,各个轴运动部件同时作用产生振动载荷。
大臂结构在各个振动源的激励下不断的产生振动。
如果这些振源和大臂发生共振现象,除了振动和噪音,还会造成机器人的定位精度丧失,甚至零件发生损坏,影响工业机器人的运动学和动力学性能,因此,必须对机器人大臂的固有频率进行分析,通过在结构上进行优化设计,避开各种振动源的激励频率。
本文以CATIA软件为设计开发与分析平台,CATIA软件作为强大的CAD设计软件,可以进行三维设计,仿真分析,本文的设计和仿真分析用同一个平台,避免了数据转换的繁琐过程以及数据丢失等相关问题,以提高其分析的精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中图分类 号 :H1 ,P 4 . 文献 标识 码 : T 6 T 2 23 A
1 引言
在实际生产过程 中, 几乎所有的设备都处在振动环境 , 以 并
各 自特 有的形态进行着振动 , 这不仅有碍产 品功能 的发挥 , 而且
果引起系统振动的频率成分比较复杂的话 , 系统一般会在最容易
引起共振 的频率上振动 , 而将其它频率过滤掉。
xu - n , NG Xi we PI Xue la g , - in CHEN - a gIL e Lu g n , IW i
( c ol f c a i l n ier g J n n nU i ri , x 2 4 2 , hn ) h o o hnc g ei ,i ga nv sy Wu i 1 12 C ia S Me aE n n a e t ( uh uPn f g n ut a C roain, t,uh u2 0 , hn ) 2 zo iga d s i op rt . d S zo 5 0 C ia S nI rl o L 1 5
徐稀 文 平雪 良 陈鲁 刚 李 巍 (江南 大学 机械 工程学 院 , 无锡 242 )(苏 州平方 实业有 限公 司 , 112 苏州 2 50 ) 150 Mo a ay i o c W edig Ro o ’ m d I An lssf rAr— l n b t S Ar
Ke r s Ro o i m ; i i e n e h d; o a a y i y wo d : b t Ar F n t El me t c e M to M d l An l ss
● 卜 .●1 ●1h- ●1卜 .●1 ●1 ●1 ●1r ●1h 1、 ●1 ● 1 ・ 1 ● 1 -●1、h ● ●1 n-●1n -,1 ●1r +1h- ●●1 ●1 1r +1h ,'、 hr● ● ●1 01 ●1 ●1 ●1 ●1 ●1~ ●1 ●1 n-●1h. ●1 ●1 ●1
aa s h t t gp it ohr ya i aa s ,ntebs p a er dl gt hiu n nl ii tesa i on te n cn l iO ai o a m tcm ei cnqead ys s rn f o d m ys h sf r io n e i i l et a i ter, D m e o t oo ra d syi ia e i ipeet fnee m n nls hoya3 dl erbt m i ce e frl , tr hc rsnsa t e a ys o h f r a s t i t n tf w h t o a aays f t mi o rbtr y i le taa s o w N Y .h euso t m d nl i o ei t i oo am b nt e m n nl i s taeA S STersh e l s h t a n i f e e s y f r f h o a aa s rv s so r tr m rvn o m i ot m d n yipoiea aifrt cueipoigadrbt tncnrl l l s d b su n o o o o
第 6期 21 0 2年 6月
文章 编号 :0 1 39 (0 2)6 0 5 — 2 10 — 9 7 2 1 0 — 1 1 0
机 械 设 计 与 制 造
Ma h n r De i n & c iey sg Ma u a t r n fcue 11 5
弧焊机 器人 大臂 结构模 态分析
【 摘
要】 弧焊机器人在工作过程 中大臂可能会 因受到冲击和振动而承受较 大动栽荷, 某种坏。因此有必要对弧焊机器人的大臂进行模 态分析 , 因为模 态分析也 是其它动力学分析的起点。 依据参数化建模技术与有限元分析理论 , 首先建立机器人大臂的三维模型,
再 利用通 用有 限元分析 软件 A S S对 已有仿 形设计 的弧 焊机 器人 大臂 模 型进 行模 态分析 ,为后 续大 NY 臂 结构的 改进及 机 器人控 制 方案的制 定提 供 了依 据 。 关键 词 : 机械臂 ; 有限元 法 ; 态分 析 模
【 s at Ab t c 】Whl r i e w li b t ok ,sam ma . e ̄l g y a cs escue ysok e n r o w rs i r ys f r a ed nmi t s asdb h c dgo t f r r advba o .h s y a clast sm xe t i a w r rc ino e i ,r v nrs l i n irt nT eed n mi od o o eetn l l t l e ei o w l n o e eutn i w le o o p s f d g e d
因此 , 当激振频率接近系统的固有频率引起共振时时 , 系统
将 还会损害操作者的身心健康 , 污染环境。该弧焊机器人是由许多 的振幅将会非常大, 引发系统不稳定甚至导致结构破坏 。因此 在设计及实际生产过程中必须要避免共振现象 的发生。 结构形状复杂的零部件组成 的系统,机械组成为串联悬臂结构 ,