第五章 定时器0和定时器1
单片机 第五章2 单片机的定时器计数器

若晶振频率为6MHz,1个机器周期为1/6 x 10-6 x12=2μs 则最小定时时间为:[213 –(213 -1)]x2μs=2μs 最大定时时间为:[213 –0] x2μs=16384μs =16.384ms
2、 方式1 (T1,T0) 当M1M0两位为 01时,定时 /计数器被选为工作方式 1,16位计数器,其逻辑结构 如图 所示。
8FH TCON TF1 8EH TR1 8DH TF0 8CH TR0 8BH IE1 8AH IT1 89H IE0 88H IT0
TF1(TCON.7, 8FH位)----定时器T1中断请求溢出标志位。 TF0(TCON.5, 8DH位)----定时器T0中断请求溢出标志位。 TR1(TCON.6, 8EH位)----T1运行控制位。 0:关闭T1;1:启动T1运行。只由软件置位或清零。 TR0(TCON.4, 8CH位)----T0运行控制位。 0:关闭T0;1:启动T0运行。只由软件置位或清零。
1、 方式0 (T1,T0)
当 M1M0两位为 00时,定时 /计数器被选为工作方式 0, 13位计数器,其逻辑结 构如图所示。
振荡器 ÷12 C/ T = 0 TL0 低5位 C/ T = 1 控制 T0 端 TR0 GATE INT0 端 TH0 高8 位 TF0 中断
+
在方式0下,计数工作方式时,计数值的范围是: 1~8192(213 ) 定时工作方式时,定时时间的计算公式为: (213一计数初值)×晶振周期×12 或(213一计数初值)×机器周期
例4:用定时器l 以工作方式2计数,每计100次进行累计器加1操作.
(1)计算计数初值. 28—100=156D=9CH TH1=9CH,TL1=9CH TMOD寄存器初始化:MlM0=10,C/T=1,GATE=0 因此 TMOD=60H (2)程序设计序设计
51单片机定时器工作方式

51单片机定时器工作方式51单片机是一种非常常见的单片机,它具有多个定时器用来实现各种定时任务。
下面我们就来详细介绍一下51单片机的定时器工作方式。
首先,51单片机的定时器可以分为两种类型:定时/计数器0(T0)和定时/计数器1(T1),它们分别有不同的工作方式和控制寄存器。
一、定时/计数器0(T0)工作方式:定时/计数器0(T0)是一个8位的定时器/计数器,它可以进行定时或计数操作。
在定时模式下,它可以作为定时器在规定的时间段内进行计时;在计数模式下,它可以根据外部信号的脉冲计数。
在定时模式下,T0可以通过设置控制寄存器TCON的位4(TR0)来启动或停止计时操作。
当TR0为1时,定时器开始计时;当TR0为0时,定时器停止计时。
定时器的工作频率可以通过控制寄存器TMOD的位1和位0来设置。
在计数模式下,T0可以通过设置TCON的位5(CT0)来选择定时器或计数器操作。
当CT0为0时,定时器工作,当CT0为1时,计数器工作。
同时,在计数模式下,还需要通过设置控制寄存器TMOD的位1和位0来设置计数器的工作频率。
定时/计数器0还可以使用中断功能,通过设置控制器IE的位4(ET0)来开启或关闭中断。
当ET0为1时,当定时器溢出时会产生中断请求,可以在中断服务程序中处理相应的操作。
二、定时/计数器1(T1)工作方式:定时/计数器1(T1)也是一个8位的定时器/计数器,它可以进行定时或计数操作。
类似于T0,T1也可以在定时模式下作为定时器进行计时,或者在计数模式下根据外部信号的脉冲进行计数。
在定时模式下,T1可以通过设置TCON的位6(TR1)来启动或停止计时操作。
当TR1为1时,定时器开始计时;当TR1为0时,定时器停止计时。
定时器的工作频率可以通过设置TMOD的位3和位2来设置。
在计数模式下,T1可以通过设置TCON的位7(CT1)来选择定时器或计数器操作。
当CT1为0时,定时器工作;当CT1为1时,计数器工作。
第五章 定时-计数器
t:设定的定时时间—uS 设定的定时时间— P:分频器的分频比--2~256 分频器的分频比--2 取值为2 16、32、64、128、256。 取值为2、4、8、16、32、64、128、256。 X:TMR0的计数初值--0~255 TMR0的计数初值 0 的计数初值-T:指令周期—uS 指令周期—
#include <pic.h> void init(); //I/O口初始化函数 //I/O口初始化函数 void tmint(); //定时器初始化函数 //定时器初始化函数 void main() { init(); tmint(); while(1) { if(T0IF) { T0IF=0; TMR0=100; RC0=!RC0; } } }
(5)当使用内部触发信号,即指令周期作为时钟信号 当使用内部触发信号, 源时,模块TMR0工作于定时方式, TMR0工作于定时方式 源时,模块TMR0工作于定时方式,触发方式为固 定上升沿触发有效。在计数器溢出时, 定上升沿触发有效。在计数器溢出时,相应的溢 出中断标志T0IF自动置位,并可产生溢出中断。 T0IF自动置位 出中断标志T0IF自动置位,并可产生溢出中断。 (6)当外部时钟信号源时,模块TMR0工作于计数方 当外部时钟信号源时,模块TMR0工作于计数方 TMR0 式,触发方式可由程序设置位上升沿触发或下降 沿触发有效。在计数器溢出时, 沿触发有效。在计数器溢出时,也可产生溢出中 断。
2.与定时器/计数器TMR0模块相关的寄存器 与定时器/计数器TMR0模块相关的寄存器 TMR0
(1)选项寄存器 OPTION_REG (1)是作为定时器还是作为计数器 (1)是作为定时器还是作为计数器 (2)决定分频器的分频系数 (2)决定分频器的分频系数 (3)时钟是上升沿 时钟是上升沿/ (3)时钟是上升沿/下降沿触发 (2)中断控制寄存器 INTCON (1)中断总控制--允许 中断总控制--允许/ (1)中断总控制--允许/禁止 (2)各类中断的控制 (2)各类中断的控制 (3)各类中断的标志 (3)各类中断的标志 RA口方向寄存器 (3)RA口方向寄存器 TRISA TMR0工作于计数器时,RA4必须设为输入 工作于计数器时,RA4必须设为输入, 当TMR0工作于计数器时,RA4必须设为输入,以便从该脚输 入时钟脉冲信号。 入时钟脉冲信号。 定时器/ (4)定时器/计数器 TMR0 8位累加计数寄存器
·定时器0和定时器1
当DCEN=1时,允许定时器2向上或向下计数,如图6所示。
这种方式下,T2EX引脚控制计器方向。
T2EX引脚为逻辑“1”时,定时器向上计数,当计数0FFFFH向上溢出时,置位TF2,同时把16位计数寄存器RCAP2H和RCAP2L载到TH2和TL2中。
T2EX引脚为逻辑“0”时,定时器2向计数,当TH2和TL2中的数值等于RCAP2H和RCAP2L中的值时,计数溢出,置位TF2,同时将0FFF 数值重新装入定时寄存器中。
当定时/计数器2向上溢出或向下溢出时,置位EXF2位。
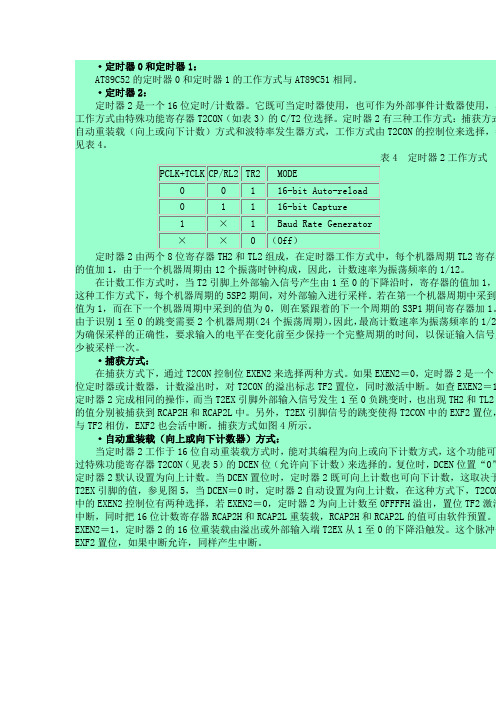
·波特率发生器:当T2CON(表3)中的TCLK和RCLK置位时,定时/计数器2作为波特率发生器使用。
如果定时计数器2作为发送器或接收器,其发送和接收的波特率可以是不同的,定时器1用于其它功能,如图7所示。
若RCLK和TCLK置位,则定时器2工作于波特率发生器方式。
波特率发生器的方式与自动重装载方式相仿,在此方式下,TH2翻转使定时器2的寄存器用RCAP2H和RCAP2L中的16位数值重新装载,该数值由软件设置。
在方式1和方式3中,波特率由定时器2的溢出速率根据下式确定:方式1和3的波特率=定时器的溢出率/16定时器既能工作于定时方式也能工作于计数方式,在大多数的应用中,是工作在定时方式(C/=0)。
定时器2作为波特率发生器时,与作为定时器的操作是不同的,通常作为定时器时,在每机器周期(1/12振荡频率)寄存的值加1,而作为波特率发生器使用时,在每个状态时间(1/2振荡频率)寄存器的值加1。
波特率的计算公式如下:方式1和3的波特率=振荡频率/{32×[65536-(RCAP2H,RCAP2L)]}式中(RCAP2H,RCAP2L)是RCAP2H和RCAP2L中的16位无符号数。
定时器2作为波特率发生器使用的电路如图7所示。
T2CON中的RCLK或TCLK=1时,波特率作方式才有效。
在波特率发生器工作方式中,TH2翻转不能使TF2置位,故而不产生中断。
51单片机定时器原理

51单片机定时器原理51单片机是一款广泛应用的微型计算机,具有体积小、功耗低、价格便宜等优点,因此在各个领域中都有广泛的应用。
其中,定时器是51单片机的重要功能之一,本文将分步骤阐述51单片机定时器原理。
一、51单片机定时器的介绍定时器是指一种能够精确计时的电子元件。
51单片机的定时器包括定时器0(T0)和定时器1(T1),它们具有不同的寄存器和使用方式。
二、定时器0的原理1. T0模式设置T0模式设置是指通过寄存器控制定时器的计数方式和时钟源。
在T0模式下,定时器的计数器是8位的,时钟源可以选择外部引脚或者内部时钟源(TH0和TL0寄存器),而计数方式可以配置为16位定时或者13位计数。
2. TH0和TL0寄存器TH0和TL0寄存器是T0模式中计数器的高8位和低8位,它们的初始值可以通过程序设置。
定时器在运行过程中会不断递增计数,当计数达到65535时,定时器会自动重新开始计数,并触发定时器0中断(TF0)。
3. 定时器中断的处理方式当定时器0到达设定的计数值时,会自动触发中断,程序会跳转到固定的中断向量地址,并执行中断服务程序。
在中断服务程序中,中断标志TF0会被自动清除,同时可以通过软件控制定时器的继续工作或停止运行。
三、定时器1的原理1. T1模式设置T1模式设置与T0模式类似,也是通过寄存器来控制计数方式和时钟源。
不同的是,在T1模式下,定时器的计数器是16位的,时钟源也可以选择外部引脚或者内部时钟源。
2. TH1和TL1寄存器TH1和TL1寄存器分别是T1模式中计数器的高8位和低8位,它们的初始值同样可以由程序设定。
定时器1在运行过程中也会不断递增计数,当计数达到65535时,同样会自动重新开始计数,并触发定时器1中断(TF1)。
3. 定时器1中断的处理方式定时器1中断的处理方式与定时器0中断相似。
当定时器1到达设定的计数值时,会自动触发中断,程序会跳转到固定的中断向量地址,并执行中断服务程序。
第五章 定时计数器与中断系统
SJMP END$
中断允许 IE(A8H) EA
ES ET1 EX1 ET0 EX0
寄存器
位地址 AFH
ACH ABH AAH A9H A8H
中断优先级 IP(B8H)
PS PT1 PX1 PT0 PX0
寄存器
位地址
BCH BBH BAH B9H B8H
4123...中外中中断部断断标中允优志断许先位触控级发:制控方T位制F式:1位选、E:A择T、FP位S0E、:SPI、IETT1E0、T、1PII、EXT101E、、XPR1T、I0、ETPX0I0、EX0 2登=级1记:开优各负中先中边断级断沿;:源触==1请发0为关求中高中信断优断号请先。:求级=;,1,==有00:为中低低断电优请平先求触级;发。=中0断,请无求中。断请求。 CPU同例响一:应优允中先许断级CP后别U响,按应该内I中部NT断查0的标询中志顺断自序请动排求清列零优。先T级I,:RI标志必须软件清零。
2.方式1
16位定时/计数器。 THx 8位和TLx低8位组成16位加1计数器 t=(216-T1初值)× 振荡周期 × 12 计数外部脉冲个数:1~65536(216) 工作结构如图。
3. 方式2
自动恢复初值8位定时/计数器。TLx为8位加1计数器, THx为8位初值暂存器。
用于需要重复定时和计数的场合。 最大计数值:256 (28) 最大定时时间(T=1s): 256s 工作结构如图。
2.非屏蔽中断
NMI 微型机
不可程控“关中断”。有中断请求信
号,CPU必须响应。
二.中断优先权
日常事务 中断服务 中断服务 程序 程序1 程序2
1.当同时有多个中断请求信号,
先响应优先级别高的中断请求。
《单片机原理及应用》第5章 定时器及应用
计数工作方式
通过引脚T0(P3.4)和T1(P3.5)对外部脉冲信号计数。 当输入脉冲信号产生由1至0的下降沿时定时器的值加1。 CPU检测一个1至0的跳变需要两个机器周期,故最高计 数频率为振荡频率的1/24。 为了确保某个电平在变化之前被采样一次,要求电平保持 时间至少是一个完整的机器周期。 对输入脉冲信号的基本要求如图5-2所示。
外部事件
计数电路 时间单位脉冲 单片机 计数完成信号
5.2 89C51定时器概述
• 89C51有两个16位的定时器/计数器,即定时器0(T0)和 定时器1(T1)。它们实际上都是16位加1计数器。 • T0由两个8位特殊功能寄存器TH0和TL0构成;T1由TH1 和TL1构成。
• 每个定时器都可由软件设置为定时工作方式或计数工作方
• 例:当P3.4引脚上的电平发生负跳变时,从P1.0输出一个 500μs的同步脉冲。请编程序实现该功能。查询方式, fosc=6MHz。
解:(1)模式选择 选T0为模式2,外部事件计数方式。当P3.4引脚上的电平发生 负跳变时,T0计数器加1,溢出标志TF0置1;然后改变T0为 500μs定时工作方式,并使P1.0输出由1变为0。T0定时到产生 溢出,使P1.0输出恢复高电平,T0又恢复外部事件计数方式。
T0的低5位:01100B=0CH即(TL0)=0CH T0的高8位:11110000B=F0H即(TH0)=F0H
(2)计算最大定时时间T
T0的最大定时时间对应于初值为0. 则:T=213×1/6 × 10-6×12=16.384ms
例2:利用T0的工作模式0产生1ms定时,在P1.0引脚输出 周期为2ms的方波。设单片机晶振频率fosc=12MHz。编 程实现其功能。 解:要在P1.0引脚输出周期为2ms的方波,只要使P1.0每隔 1ms取反一次即可。 (1)选择工作模式 T0的模式字为TMOD=00H,即 M1M0=00,C/T=0,GATE=0,其余位为0。 (2)计算1ms定时时T0的初值
单片机课件—定时计数器
理
工
大
振荡器 12 C/T=0
学
TLx THx
工 程
Tx端
C/T=1
(8位) (8位) 控制 =1
技 TRx位 术 GATE位 学 INTx端 院
开关接通
&
≥1 与门 或门
申请 TFx 中断
2020年5月23日2时16分
第五章 MCS-51系列单片机硬件资源的应用
工作方式1 的编程要点:
成 都
THx/TLx赋初值:THx赋高8位,TLx赋低8位
成
都 理 工
定时/计数器可按片内机器周期定时,也可对由 T0/T1引脚输入一个负脉冲进行加法计数
大
学 在已经开放T0/T1中断允许且已被启动的前提下:
Hale Waihona Puke 工程 T0/T1加满溢出时 TF0/TF1标志位自动置“1”
技 术 学
检测到TCON中TF0/TF1变“1”后,将产生指令: LCALL 000BH/LCALL 001BH 执行中断服务程序,
TFx 中断
溢
≥1
控制 =1
开关接通
&
THx
与门
(8位)
出 位 门开
学 INTx端
或门
院
2020年5月23日2时16分
第五章 MCS-51系列单片机硬件资源的应用
工作方式 2 的编程:
成 都 理 工
☞ THx/TLx赋相同初值 在TLx计数达到0FFH 再加“1”时,TLx 将溢出,进位位直接进入“TFx”去申请
大 0 0:13位 Timer——用它无益,不要记它!
学 0 1:16位 Timer——经常用到
工 1 0:可自动重装的 8位 Timer——经常用到
单片机原理第5章定时、计数器
5.2.2 控制寄存器 控制寄存器TCON
5,控制寄存器TCON初始化设置 ,控制寄存器 初始化设置
0
0 1
0
1 0 1
0
0
0
0
复位时, 的所有位被清0. 复位时,TCON的所有位被清 的所有位被清 要启动,关闭 , 要启动,关闭TI, T0,需对 ,需对TR1,TR0用 , 用 软件设置: 软件设置: SETB TRx;启动 ; CRL TRx;关闭 ; 也可以用传送指令 MOV TCON,#50H , 同时启动T0, 同时 同时启动 ,T1同时 使用电平触发方式. 使用电平触发方式.
时钟 振荡 ÷12
2,脉冲计数 , 每来1个脉冲,计 每来 个脉冲, 个脉冲 数器加1. 数器加 .
C P U
T0 TL0 0 0 0 0 0 0 1 0 0 1 0 0 0 0 0 0 0 0
溢 出 启动 TH0 工作 方式
TCON
TMOD
中断
5.1 定时器的结构及工作原理
1,计数脉冲来源 ,
(P3.4)
INT0(INTI)=1 指令 SETB TR0(TR1) 启动定时/计数器 启动定时 计数器T0(T1) 计数器
1
5.2.2 控制寄存器 控制寄存器TCON
1,溢出标志位 TFx
0 1
TFl(TCON.7):T1溢出标志位.当T1溢出时由硬 : 溢出标志位 溢出标志位. 溢出时由硬 件自动使中断触发器TFl置1,并向 申请中断. 件自动使中断触发器 置 ,并向CPU申请中断. 申请中断 响应进入中断服务程序后, 当CPU响应进入中断服务程序后,TFl又被硬件 响应进入中断服务程序后 又被硬件 自动清0. TFl也可以用软件清 . 自动清 . 也可以用软件清0. 也可以用软件清 TF0(TCON.5):T0溢出标志位.其功能和操作同 : 溢出标志位 其功能和操作同TFl 溢出标志位.
第5章思考题及习题5参考答案
第5章思考题及习题5参考答案一、填空1.如果采用晶振的频率为3MHz,定时器/计数器T x(x=0,1)工作在方式0、1、2下,其方式0的最大定时时间为,方式1的最大定时时间为,方式2的最大定时时间为。
答:32.768ms,262.144ms,1024µs2.定时器/计数器用作计数器模式时,外部输入的计数脉冲的最高频率为系统时钟频率的。
答:1/243.定时器/计数器用作定时器模式时,其计数脉冲由提供,定时时间与有关。
答:系统时钟信号12分频后,定时器初值4.定时器/计数器T1测量某正单脉冲的宽度,采用方式可得到最大量程?若时钟频率为6MHz,求允许测量的最大脉冲宽度为。
答:方式1定时,131.072ms。
5. 定时器T2 有3种工作方式:、和,可通过对寄存器中的相关位进行软件设置来选择。
答:捕捉,重新装载(增计数或减计数),波特率发生器,T2CON6. AT89S52单片机的晶振为6MHz,若利用定时器T1的方式1定时2ms,则(TH1)= ,(TL1)= 。
答:FCH,18H。
二、单选1.定时器T0工作在方式3时,定时器T1有种工作方式。
A.1种B.2种 C.3种D.4种答:C2. 定时器T0、T1工作于方式1时,其计数器为位。
A.8位B.16位C.14位D.13位答:B3. 定时器T0、T1的GATE x=1时,其计数器是否计数的条件。
A. 仅取决于TR x状态B. 仅取决于GATE位状态C. 是由TR x和INT x两个条件来共同控制D. 仅取决于INT x的状态答:C4. 定时器T2工作在自动重装载方式时,其计数器为位。
A.8位B. 13位C.14位D. 16位答:D5. 要想测量INT0引脚上的正单脉冲的宽度,特殊功能寄存器TMOD的内容应为。
A.87HB. 09HC.80HD. 00H答:B三、判断对错1.下列关于T0、T1的哪些说法是正确的。
A.特殊功能寄存器SCON,与定时器/计数器的控制无关。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1
2 5:3
0
0 0
8:6
11 : 9
CAPn.2
CAPn.3
与CAPn.0对应位功能相同(略)
与CAPn.0对应位功能相同(略)
0
0
• 寄存器描述 ——捕获功能寄存器
定时器计数器 TC 捕获控制 CCR 捕获寄存器
CR0~CR3
每个捕获寄存器都与一个或几个器件管脚相关联。 当管脚发生特定的事件时,可将定时器计数值装入该寄 存器。捕获控制寄存器的设定决定捕获功能是否使能, 以及捕获事件在管脚的上升沿、下降沿或是双边沿发生。
MR0~MR3
匹配输出 EMR
TC
匹配寄存器(MR0~MR3)值与定时器计数值相比较, 当两个值相等时自动触发在MCR寄存器中设臵的动作。
位 功能 31 : 0 匹配值 复位值 0
• 寄存器描述 ——匹配功能寄存器
匹配控制
MCR 匹配值 定时器计数器
MR0~MR3
匹配输出 EMR
TC
外部匹配寄存器提供外部匹配管脚MATn.0~ MATn.3(n为0或1)的控制和状态。
• 寄存器描述 ——基本功能寄存器
名称
TCR TC
描述
定时器控制寄存器。控制定时器计数器功能(禁止或复位)。 定时器计数器。为32位计数器,计数频率为PCLK经过预分频 计数器后频率值。
访问
读写 读写
复位值
0 0
PR
PC IR
预分频控制寄存器。用于设定预分频值,为32位寄存器。
预分频计数器。为32位计数器,计数频率为PCLK,当计数值 等于预分频计数器的值时,TC计数器加一。 中断标志寄存器。读该寄存器识别中断源,写该寄存器清除中 断标志。
设置匹配值及 工作模式 设置捕获方式 设置定时器中断 VIC
T0MR0 = Fpclk / 10;
设置匹配值,0.1S
启动定时器0
设置定时器中断 } VIC
启动定时器 TCR
启动定时器 TCR
• 定时器操作示例 ——用定时器测量脉冲宽度
• 寄存器描述 ——基本功能寄存器
TxPR 预分频寄存器 Fpclk 预分频计数器 TxPC TxTCR 定时器控制 定时器计数器 TxTC 中断标志寄存器 TxIR
定时器控制寄存器TCR用于控制定时器计数器的 操作。
TCR 0 功能 计数器使能 描述 复位值 0
1:定时器计数器和预分频计数器使能计数; 0:定时器计数器和预分频计数器停止计数。
匹配控制
MCR 匹配值 定时器计数器
MR0~MR3
匹配输出 EMR
TC
匹配控制寄存器用于控制在发生匹配时所执行的操作。
位 0 功能 中断 (MR0) 复位 (MR0) 停止 (MR0) MR1 描述 匹配控制 匹配值 定时器计数器 为1时,MR0与TC值的匹配将产生中断。为0时禁止。 MCR TC MR0~MR3 复位值 0
TxPR寄存器为32位寄存器,该寄存器指定了预分 频计数器的最大值。
位 功能 TxPR 预分频寄存器 31 : 0 TxTCR 预分频值 定时器控制 定时器计数器 中断标志寄存器
Fpclk
预分频计数器
TxPC
TxTC
TxIR
• 寄存器描述 ——基本功能寄存器
TxPR 预分频寄存器 Fpclk 预分频计数器 TxPC TxTCR 定时器控制 定时器计数器 TxTC 中断标志寄存器 TxIR
位 功能 31 : 0 捕获值 复位值 0
5.14 定时器0/1
• 使用定时器的注意要点
定时计数器(TC)本身不能产生中断,只有与匹配寄存 器发生匹配后才能引起中断事件; 在定时器匹配发生后,可以不停止定时器工作,而动 态修改匹配寄存器的值;
定时器使用匹配功能的同时,还可以使用捕获功能, 而不必分时使用;
• 应用
LPC2000
捕获外部信号
CAP MAT
用于对内部事件进行 计数的间隔定时器, 或着产生系统节拍
匹ቤተ መጻሕፍቲ ባይዱ输出
• 定时器引脚描述
管脚名称 CAP0.3~CAP0.0 CPA1.3~CAP1.0 管脚方向 管脚描述 捕获信号,用来捕获管脚的跳变,可配置为将定时器 值装入一个捕获寄存器,并可选择产生一个中断。可 选择多个管脚用作捕获功能,而且,假设如果有2个 管脚被选择并行提供CAP0.2功能,它们的输入将进 行逻辑或,所得结果用作一个捕获输入。
5.14 定时器0/1
• 特性
LPC2000系列“微控制器”具有两个功能强大的 定时器,它们具有以下特性: 具有32位可编程预分频器; 多达4路捕获通道,可设臵被捕获信号的特征; 4个32位匹配寄存器,可设臵匹配发生后的动作; 4个对应于匹配寄存器的外部输出,可设臵匹配输 出的信号特征。
5.14 定时器0/1
中断寄存器包含4个位用于匹配中断,另外4个位 用于捕获中断。如果有中断产生,IR中的对应位会臵 位。向对应的IR位写入1会复位中断,写入0无效。
位 功能 描述 位 功能 描述
0
1 2
MR0中 断
MR1中 断 MR2中 断
匹配0中断
匹配0中断 匹配0中断
4
5 6
CR0中断
CR1中断 CR2中断
捕获0中断
定时器计数时钟频率 = Fpclk / (PR+1)
• 定时器操作示例
定时器设臵为匹配时复位计数器并产生中断。预分 频设臵为2,匹配寄存器设臵为6。在发生匹配的定时器 周期结束时,定时器计数值复位。这样就使匹配值具有 完整长度的周期。
PCLK 预分频计数器 定时器计数器 TC复位 中断
产生匹配中断
捕获1中断 捕获2中断
• 寄存器描述 ——匹配功能寄存器
名称
MCR MR0 MR1
描述
匹配控制寄存器,用于控制在匹配时是否产生中断或复位TC 匹配寄存器0,通过MCR寄存器可以设置匹配发生时的动作 匹配寄存器1,通过MCR寄存器可以设置匹配发生时的动作
访问
读写 读写 读写
复位值
0 0 0
MR2
MR3 EMR
访问
读写 只读 只读 只读 只读
复位值
0 0 0 0 0
定时器计数器 TC 捕获控制 CCR 捕获寄存器 CR0~CR3
• 寄存器描述 ——捕获功能寄存器
定时器计数器 TC 捕获控制 CCR 捕获寄存器
CR0~CR3
在发生捕获事件时,捕获控制寄存器用于控制是否 将定时器计数值装入寄存器。同时还可以设臵被捕获信 定时器计数器 号的特征。
MAT0.3~MAT0.0 MAT1.3~MAT1.0
输出
Tx定时器
信号输出 匹配控制寄存器 = 匹配寄存器
当定时器值等于预设 的匹配值时,从引脚 输出特定的信号
5.14 定时器0/1
• 寄存器描述
LPC2000微控制器中与定时器相关的寄存器数量 较多,但可以分为三类: ▪基本功能相关寄存器; ▪匹配功能相关寄存器; ▪捕获功能相关寄存器;
TC 捕获控制 CCR 捕获寄存器 CR0~CR3
• 寄存器描述 ——捕获功能寄存器
定时器计数器 TC 捕获控制 CCR 位 0 功能 捕获寄存器
CR0~CR3
描述 复位值 0
CAPn.0 为1时,CAPn.0引脚上0到1的跳变将导致TC的内容 上升沿捕获 装入CR0。为0时,该特性被禁止。 CAPn.1 为1时,CAPn.0引脚上1到0的跳变将导致TC的内容 下降沿捕获 装入CR0。为0时,该特性被禁止。 CAPn.0 事件中断 CAPn.1 为1时,CAPn.0的捕获事件将产生一个中断。为0时 该特性被禁止。 与CAPn.0对应位功能相同(略)
1
为1时定时器计数器和预分频计数器在PCLK 计数器复位 的下一个上升沿同步复位。计数器在TCR的 bit1恢复为0之前保持复位状态。
0
• 寄存器描述 ——基本功能寄存器
TxPR 预分频寄存器 Fpclk 预分频计数器 TxPC TxTCR 定时器控制 定时器计数器 TxTC 中断标志寄存器 TxIR
0 1 4
预分频计数器计 数频率为PCLK
2 0 1 5 2 0 1 6 2 0 1 0 2 0 1 1
定时器计数器计 数频率为PCLK/3
最后一个周期复 位定时器计数器
PR=2, MRx=6, 匹配时使能中断和复位
• 定时器操作示例
操作流程
计算定时器的 计数频率
设置匹配值及 工作模式 设置捕获方式 设置定时器中断 VIC
启动定时器 TCR
• 定时器操作示例 ——定时器0初始化
操作流程
计算定时器的 计数频率
操作流程
C代码: 计算定时器的 计数频率 Void Time0Init(void)
{ T0TC 设置匹配值及= 0; 工作模式 = 0; T0PR T0MCR 设置捕获方式= 0x03; T0TCR = 0x01; 定时器设置为0 设置预分频值 设置匹配模式,复位并中断
读写
读写 读写
0
0 0
TxPR 预分频寄存器
TxTCR 定时器控制 定时器计数器 中断标志寄存器
Fpclk
预分频计数器
TxPC
TxTC
TxIR
• 寄存器描述 ——基本功能寄存器
TxPR 预分频寄存器 Fpclk 预分频计数器 TxPC TxTCR 定时器控制 定时器计数器 TxTC 中断标志寄存器 TxIR
• 寄存器描述 ——匹配功能寄存器
匹配控制
MCR 匹配值 定时器计数器
MR0~MR3
匹配输出 EMR
TC
位
功能
描述 反映相应外部匹配的状态,而不管是否连接到 管脚。发生匹配时该位的动作由EMR中相应的 控制位决定。