深海电驱动复合轮式行驶机构转速和转矩协调控制策略
船舶电力推进直接转矩与转速复合控制
船 舶 电 力推 进 直 接 转 矩 与转 速 复合 控 制
张桂 臣,马捷
( 上海 交通 大学 海 洋工程 国家实验 室, 上海 20 3 ) 0 0 0
摘
要: 针对常规船舶 电力推 进控制器没有充分利用推进系统 的动态 特性 这一问题 , 出了包含 速度 、 提 转矩 、 推力和功 率
特性 的复合 控制算法 , 立了基于 SMO I N的船舶 电力推进模 拟设 备 , 行推进 电机复 合控制 的试验研 究. 建 I TO 进 分析并 比 较 了速度 、 转矩 与功率 3种控 制策略. 试验结果表 明 : 利用直接转矩与转速 复合 控制 , 能获得精确 和平 滑的转速与转矩 控
2 O @ 1 3. o O4 6 c m.
成 吊舱式 SP电力推进半实物仿真系统 如图 1 S 坦,
所示 , 该系 统能 实现船 舶 电力 推进 的运 动控 制 、 逻辑
和运算功能 , 提供测试和验证平 台. S O I N电 在 I TO M
通信作者 : 张桂 臣.
・
5 2・ 4
哈
尔
滨
工
程
大
学
学
报
第3 2卷
力推进系统仿真平台上可进行推进 电机操纵及其复 合控 制试 验 .
图 1中的主要 部件 如下 : 1 S O T是 电力推 进控 制 系统 的软件 平 台 , )C U 提 供统 一 的功 能导 向的 自动化 控制及 其 编程 .
2 船舶 电力推进 系统 的动态特性
su y a d a ay i fp o u so trs e d,t r u t d n n lsso r p li n mo o p e o q e,a d po rc n r le swa c i v d.Th x e me t lr s l n we o to lr sa h e e e e p r n a e u t i s
电动汽车驱动工况下的整车控制策略研究

电动汽车驱动工况下的整车控制策略研究一、概述随着全球能源结构的转型和环保意识的日益增强,电动汽车作为新能源汽车的代表,正逐渐成为未来汽车产业的发展方向。
电动汽车的普及不仅有助于减少化石燃料的消耗,降低温室气体排放,还能通过智能化、网联化的技术手段,提升驾驶体验和道路安全性。
电动汽车的发展也面临着诸多技术挑战,驱动工况下的整车控制策略就是关键的技术难题之一。
整车控制策略是电动汽车性能优化的核心,它涉及到电池管理、电机控制、能量回收等多个方面。
在驱动工况下,整车控制策略需要根据车辆的行驶状态、驾驶者的意图以及外部环境的变化,实时调整电池的输出功率、电机的转矩和转速等参数,以实现高效、平稳的驾驶体验。
整车控制策略还需要考虑能量消耗和回收的平衡,以延长电动汽车的续航里程。
国内外学者和汽车厂商对电动汽车整车控制策略进行了广泛而深入的研究。
这些研究涵盖了控制算法的优化、硬件平台的搭建以及实验验证等多个方面。
由于电动汽车的复杂性和多样性,目前仍然存在一些技术难题需要解决。
如何准确识别驾驶者的意图、如何优化电池的能量管理策略、如何在保证安全性的前提下提高电动汽车的性能等。
本文旨在针对电动汽车驱动工况下的整车控制策略进行研究。
通过对现有技术的梳理和分析,提出一种基于模糊控制算法的整车控制策略,旨在提高电动汽车的驾驶性能、续航里程和安全性。
本文还将通过实验验证该策略的有效性和可行性,为电动汽车的进一步发展提供理论支持和实践参考。
1. 电动汽车发展现状与趋势随着全球能源结构的转型和环保意识的日益增强,电动汽车作为新能源汽车的重要代表,正逐渐成为汽车产业未来发展的主流方向。
电动汽车的市场渗透率不断提高,产业链逐步完善,技术不断创新,展现出强劲的发展势头和广阔的发展前景。
从市场角度看,电动汽车的销量持续增长,市场规模不断扩大。
各国政府纷纷出台政策扶持电动汽车产业的发展,如购车补贴、税收优惠、充电设施建设等,为电动汽车市场的快速增长提供了有力支持。
基于V模式的机电复合传动能量管理控制系统设计
基于V模式的机电复合传动能量管理控制系统设计张为;王伟达;车坚志;张夕珂;靳瑾【摘要】利用V模式开发方法进行了能量管理控制系统的设计与验证,实现了方案设计与仿真、快速控制原型、硬件在环仿真、道路试验标定与验证等各开发环节.研究结果表明,设计的机电复合传动功率耦合方案、控制方案和控制策略正确可行,开发的能量管理控制系统完成了系统的能量管理和综合控制功能,性能良好.应用V 模式开发方法使设计与验证工作简单易行,提高了研发效率,具有较大的优越性.%The energy management control system of electro-mechanical transmission ( EMT) system was designed and verified based on V-mode development. It realized the power management and integrative control by running the control strategy and driving the actuators. The control system was verified and validated by the road test. The results indicate that the design scheme of power-split and control system and control strategy are correct and feasible. The developed control system can realize the function of power management and integrative control. The design and validation work is easier to implement by using the V-mode method and the research and development efficiency is improved.【期刊名称】《农业机械学报》【年(卷),期】2012(043)010【总页数】8页(P1-7,13)【关键词】机电复合传动;能量管理控制系统;V模式;道路试验【作者】张为;王伟达;车坚志;张夕珂;靳瑾【作者单位】交通运输部科学研究院,北京100029;北京理工大学车辆传动国家重点实验室,北京100081;内蒙古第一机械(集团)有限公司科研所,包头014030;交通运输部科学研究院,北京100029;交通运输部科学研究院,北京100029【正文语种】中文【中图分类】U463.2引言近十多年来,纯电动汽车(EV)、混合动力汽车(HEV)和燃料电池汽车(FCEV)成为研究的热点。
深海复合轮式行走机构的设计
轮 距 。 前 轮 系 油 缸 自锁 , 轮 使
系 的 前 轮 、 轮 、 轮 与 车 架 中 后
保 持 固 定 状 态 , 沟 过 程 中 车 跨 辆 保 持 匀 速 行 驶 , 个 轮 系 中 每 至 少 一 个 轮 胎 接 触 地 面 . 障 保
台 阶 以 后 . 缸 断 油 . 轮 系 油 前
绕前轮往下方转动 , 3个 轮 处
于 自适 应 状 态 ( i和 j 。 轮 系 ) 后
下 台阶重 复前 轮 系的动 作 。
2. 2 跨 越 壕 沟 地 形
车 辆 前 9- 到 壕 沟 . 测 b遇 检
到 壕 沟 间 距 小 于 轮 系 中 前 后
一
款 兼 有 主 、 动 越 障模 式 的 深 海 复 合 轮 式 行 走 机 构 。 被
1 深 海 复 合 轮 式 行 走 机 构 的设 计
11 行 走 机 构 总 体 设 计 .
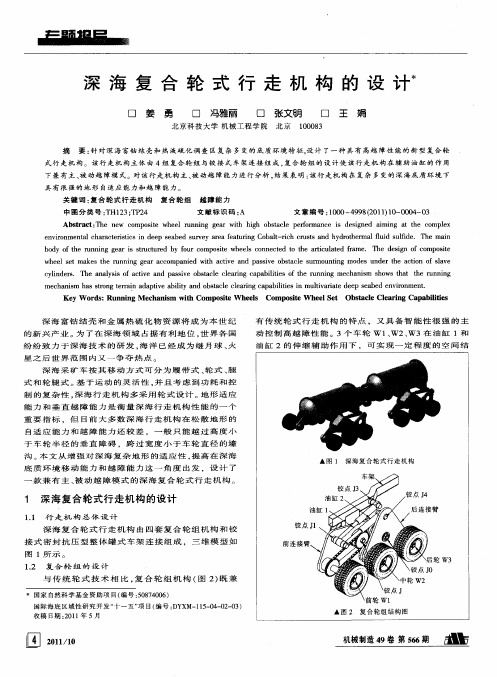
深 海 复 合 轮 式 行 走 机 构 由 四套 复 合 轮 组 机 构 和 铰 接 式 密 封 抗 压 型 整 体 罐 式 车 架 连 接 组 成 ,三 维 模 型 如
整 个 行 走 机 构 为 1 x1 轮 驱 动 。 2 2
2 深 海 行 走 机 构 越 障 策 略规 划
2 1 跨 越 高 于 轮 胎 半 径 的 台 阶 地 形 .
当 车 辆 前 方 遇 到 高 于 车 轮 半 径 障 碍 物 时 ,采 用 主 动 越 障 的 越 障 方 式 , 障 过 程 如 图 4所 示 。 越 车 辆 在平 地 行 驶 ( )当检 测 到 该 台阶 障 碍 物 时 , a, 构变 化 , 而 使 整个 机 构 兼 有 主 、 动 混合 越 障 模 式 。 从 被 主 动 模 式 下 可 以越 过 高 于 轮 胎 半 径 的 垂 直 障 碍 , 跨 过 大 于 轮胎 直 径 的壕 沟 ; 动 模 式 下 , 以 爬 3 。 , 被 可 0坡 自 适 应 普通 海底 底质 环 境行 驶 等 。
四轴混合动力车辆机电复合制动控制策略

四轴混合动力车辆机电复合制动控制策略摘要:随着我国科学技术的不断发展,在汽车及汽车动力方面也得到了越来越多的社会关注和学者研究。
特别是在四轴混合动力车辆的机电复合制动控制方面,由于该研究方向不仅包括了车辆的基本构造和运行原理,更包括了机电专业及动力运行等专业知识,因此需要研究学者结合不同专业的内容对如何更好的发展四轴混合动力车辆进行深入研究与探讨。
对此,本文将以四轴混合动力车辆的动力机制为基础,分析机电复合制动控制的具体策略,并深入分析在车辆的机电复合制动工况下,车辆内部的电机和液压制动力的具体分配情况。
关键词:混合动力车辆;机电复合制动控制;控制策略引言在本文的研究与讨论中,主要以四轴混合动力车辆的参数和制动过程为基本内容,并在计算机软件上进行力学模型建模,具体研究车辆的机电复合制动控制策略。
在我国科学技术不断发展的过程中,对于机电复合制动控制策略也有着更加深入的了解和研究,本文正是基于学者的研究着力探讨,在不同制度模式下车辆的制动矩离、制动时间和速度等对比分析,研究机电复合制动对四轴混合动力车辆的应用效果。
一、四周混合动力车辆在我国对于车辆的动力、车辆的发电机制以及车辆的电机电控等技术的深入研究和不断发展中,混合动力车辆以及性价比、,噪音小、更加节能且燃油经济性好、能量回收率高、液压制动安全稳定、电机制动响应快等特点成为了目前我国研究学者对于车辆运行和制动的主要研究方向之一[1]。
同传统车辆不同,四轴混合动力车辆是将车辆的发动机电机和蓄电池等动力机制组合在一起,并对其进行具体的分配和优化,以保证这些动力装置能够发挥电动车和内燃机汽车的综合优点,保证其既具备内燃机汽车良好的发动性能和制动技能,又具备纯电动汽车的节能性、性价比高等优势的一种双动源车辆。
该车辆在节约资源节约能源的基础上,降低了传统单纯的内燃机汽车的燃油消耗,并且同电动汽车相比动力性更强,是我国车辆未来的发展趋势之一。
从四驱混合动力车辆的发展和技术特点来看,双动力源是我国研究学者首要研究的内容和方向,但是也正是由于双动力源在车辆的制动方面有着比传统单一动力源更复杂的操作和运行,因此需要研究学者研究如何更好的发挥双动力源的特性、如何在保证车辆良好运行的基础上更好的节约车辆的燃油、如何更好的发挥四轴混合动力车辆的性价比优势。
新能源汽车电气技术(第2版)课件:新能源汽车电动助力转向系统
四、EPS系统的优缺点
1.EPS系统具有以下优点: 与其他转向系统相比,该系统突出的优点表现在: 1)更加节省能源和环保。因为EPS没有液压器件,所以可算得上是标准 的“按需供能型”系统,即在转向的情况下系统才工作,而汽车停止时或者 直线运行时完全不消耗任何能量,这样一来耗能就会相对较少。因此与液压 动力系统进行比较,可以节约能源80%到90%。而在不转向时,EPS燃油消耗 会降低2.5%;在使用转向系统时,则会减少5.5%。另外又因为在-40℃的低 温的状况下,EPS也可以较好地工作,而传统的液压系统只有液压油预热后 才可以工作,由于EPS没有起动时的预热过程,所以节省了许多能量。EPS也 不存在液态油的泄漏问题,从而也不会对环境造成严重的污染,符合了环保 的设计理念。 2)助力效果相对更好。EPS可根据汽车运行的不同工况,通过优化设计 助力特性曲线,获得准确的助力,助力效果十分理想。同时还可以通过控制 阻尼系数减小因为路面的干扰对转向系统产生的影响,保障车辆低速行驶时 的轻便性,提高汽车高速行驶时的稳定性,进而提高汽车的转向性能。
六、电动助力转向系统(EPS)工作原理
转向器选择齿轮齿条式,转向盘转矩通过扭矩传感器来测得。当没有转向动作时,助力 电机不工作;当驾驶员有转向操作时,扭矩传感器发出一个电压信号,电子控制单元(ECU) 根据电压信号值推算得到转向盘转矩的大小及方向,同时,车速传感器将检测到的当前车速 传递到电子控制单元(ECU),电子控制单元(ECU)先根据车速选择与之对应的助力特性曲 线,再根据转向盘转矩进行运算处理,得到目标助力转矩的大小以及方向,再经过一系列计 算确定助力电机的旋转方向和驱动电流的大小,助力电机根据得到的驱动电流提供相应的助 力转矩,减速增扭后作用到转向轴上,为转向系统提供与工况相适应的助力。
全电动轮汽车的转矩协调控制策略研究
Wa n g x i u j i e , C h e n y o n g , Z h e n g x i n , Wa n g we i
( 1 . B e i j i n g I n f o r ma t i o n a n d S c i e n c e a n d T e c h n o l g y U n i v e r s i t y , B e i j i n g 1 0 0 1 9 2 ;
的基础 上 ,提 出了基于 名义 载荷 的转矩 协 调策 略 。对 该策 略在所 建 立 的非 线性 七 自由度 车辆动 力
学模 型 中进 行 了前轮 角 阶跃输 入工 况下 的仿 真分 析 ,效 果较 好 。该 策略对 于全 电动轮 汽 车转矩 协
调策 略 的研 究 具有一 定 的参考 意义 。
c o n d i t i o n o f ro f n t wh e e l a ng l e s t e p i n p u t , a n d t h e r e s u l t s i s g o o d. Th e s ra t t e g y h a s a c e r t a i n r e f e r e n c e v a l u e f or
CLC NO. : U4 6 9 . 7 2 Do c u me n t Co d e : A Ar t i c ( 2 0 1 4 1 0 2 - 7 5 . 0 6
_・
I _ ‘-・ _ -
效率 高 、转矩 响 应快 速 、精确 易 于获 得等优 点 ,受
t o r q u e c o o r d i na t e d s ra t t e g y o f AW I D. Ke y wo r d s : a l l wh e e l i n de pe nd e nt dr i v e e l e c t r i c v e h i c l e , t o r qu e c o o r d i n a t e d s t r a t e g y ,n o mi n a l l o a d
混合动力汽车的能量控制策略
混合动力汽车的能量控制策略能量管理策略的控制目标是根据驾驶人的操作,如对加速踏板、制动踏板等的操作,判断驾驶人的意图,在满足车辆动力性能的前提下,最优地分配电机、发动机、动力电池等部件的功率输出,实现能量的最优分配,提高车辆的燃油经济性和排放性能。
由于混合动力汽车中的动力电池不需要外部充电,能量管理策略还应考虑动力电池的荷电状态(SOC)平衡,以延长其使用寿命,降低车辆维护成本。
混合动力汽车的能量管理系统十分复杂,并且因系统组成不同而存在很大差别。
下面简单介绍3种混合动力汽车的能量管理策略。
1、串联式混合动力汽车能量管理控制策略由于串联混合动力汽车的发动机与汽车行驶工况没有直接联系,因此能量管理控制策略的主要目标是使发动机在最佳效率区和排放区工作。
为优化能量分配整体效率,还应考虑传动系统的动力电池、发动机、电动机和发电机等部件。
串联式混合动力汽车有3种基本的能量管理策略。
(1)恒温器策略当动力电池SOC低于设定的低门限值时,起动发动机,在最低油耗或排放点按恒功率模式输出,一部分功率用于满足车轮驱动功率要求,另一部分功率给动力电池充电。
而当动力电池SOC上升到所设定的高门限值时,发动机关闭,由电机驱动车辆。
其优点是发动机效率高、排放低,缺点是动力电池充放电频繁。
加上发动机开关时的动态损耗,使系统总体损失功率变大,能量转换效率较低。
(2)功率跟踪式策略由发动机全程跟踪车辆功率需求,只在动力电池SOC大于设定上限,且仅由动力电池提供的功率能满足车辆需求时,发动机才停机或怠速运行。
由于动力电池容量小,其充放电次数减少,使系统内部损失减少。
但是发动机必须在从低到高的较大负荷区内运行,这使发动机的效率和排放不如恒温器策略。
(3)基本规则型策略该策略综合了恒温器策略与功率跟踪式策略的优点,根据发动机负荷特性图设定高效率工作区,根据动力电池的充放电特性设定动力电池高效率的SOC范围。
同时设定一组控制规则,根据需求功率和SOC进行控制,以充分利用发动机和动力电池的高效率区,使两者达到整体效率最高。
提高电动车用轮式电机转矩的方法!
提高电动车用轮式电机转矩的方法收稿日期:2005-04-12“863”计划电动车专题,项目编号:203AA 501324尚俊云,张千帆,崔淑梅(哈尔滨工业大学,哈尔滨 150001)摘 要:在综述电动车用轮式电机系统的转矩研究的基础上,提出了直接驱动时,电动车用轮式电机系统的转矩特性要求与特点;分别针对永磁轴向磁通电机和径向磁通电机的转矩过载能力和转矩波动的减小等问题进行了系统的分析与论述。
关键词:电动车;轮式电机;转矩特性中图分类号:TM 351 文献标识码:A 文章编号:1001-6848(2005)06-0084-03The M ethod of I m prov i ng Torque Character i n The D irect -dr ive W heelM otor Appl ied i n Electr ic Veh icleSHAN G Jun -yun ,ZHAN G Q ian -fan ,CU I Shu -m ei(H arb in In stitu te of T echno logy ,H arb in 150001,Ch ina )Abstract :T he research of the to rque in the direct -driven w heel mo to r app lied in electric veh icle is review ed .T he to rque characters of the direct -drive w heel mo to r app lied in electric veh icle are summ arized .How to incrase the overload capacity and reduce the ri pp le of the to rque fo r the A x ial and radial flux P M M ach ine is analyzed .T he m ethods to so lve the above tw o questi on s are review ed .Key words :electric veh icle ;w heel mo to r ;to rque character0 引 言电动车电机驱动系统根据主驱动电机的个数可分为两种类型:单电机系统和多电机系统。
轮式电动车转向差速控制方法
轮式电动车转向差速控制方法毛英慧;靳光盈;李新伟;张晓艳【摘要】基于转向差速控制技术,建立了适用轮式电动车低速行驶时的阿克曼转向差速模型.采用4个模糊PID复合控制器,对驱动轮毂电机转速进行控制并协调分配四电机的转矩,实现转向差速控制.仿真结果表明,所采用的阿克曼差速控制方法完全满足轮式电动车在低速转向差速的需求,同时驱动电机的转速控制系统能较好地实现给定参考速度的自适应跟踪,可以提高车辆在低速转向时的操纵性和稳定性.【期刊名称】《电机与控制应用》【年(卷),期】2016(043)003【总页数】6页(P74-78,88)【关键词】轮式电动车;电机转速;电子差速;阿克曼转向差速模型【作者】毛英慧;靳光盈;李新伟;张晓艳【作者单位】长春汽车工业高等专科学校,吉林长春130011;长春汽车工业高等专科学校,吉林长春130011;长春汽车工业高等专科学校,吉林长春130011;长春汽车工业高等专科学校,吉林长春130011【正文语种】中文【中图分类】TM301.2采用轮毂电机直接驱动的电动车不但可以省去复杂的机械传动机构和机械差速装置,减轻汽车重量,而且可以精确地控制每个车轮的速度和转矩,提高汽车的操纵性和稳定性[1]。
采用轮毂电机直接驱动必须解决各个驱动轮之间的同步协调问题,即转向差速问题[2]。
转向差速问题主要指车轮旋转的线速度与该轮的轮心速度无法相协调,从而导致车轮滑转或拖滑,造成轮胎磨损以及功率损耗[3]。
从现有的文献分析,解决轮式电动车转向差速问题的途径主要有两个:通过整车控制器调节各驱动电机的转矩和转速实现;通过特殊电机结构实现[4-5]。
文献[6]提出了一种基于转矩控制的转向差速算法,将轮式电动车转弯时转矩分配计算和基于车轮滑移率的开关控制相结合,设计的差速系统鲁棒性较好,但实现较为复杂。
文献[7]将电机的转速和转矩同时考虑,提出了基于神经网络PID的转向差速与转速转矩综合控制策略,但该方法也是只在低速情况下有较好的差速效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第 42 卷增刊 2 中南大学学报(自然科学版) V ol.42 Suppl. 2 2011 年 9 月 Journal of Central South University (Science and Technology) Sep. 2011 深海电驱动复合轮式行驶机构转速和转矩协调控制策略何耀,杨珏,张文明,冯雅丽(北京科技大学 机械工程学院,北京,100083)摘要:针对采用独立轮毂电机驱动的新型海底铰接式复合轮式行驶机构,研究其在水平路面转向过程中各驱动轮 的相对转速关系,为各驱动轮电机在转向工况下的转速输出控制策略提供了理论依据;利用虚拟样机仿真模型模 拟该行驶机构通过不同高度的台阶、越过壕沟及爬坡时的运行过程,得出各驱动轮电机的转矩输出特性;根据驱 动轮组中各个车轮对地面正压力的变化规律,确定在不同越障工况下各驱动轮电机的转矩控制策略依据。
关键词:复合轮式车辆;轮毂电机驱动;转矩输出;控制策略中图分类号:P731.31;P941.61 文献标志码:A 文章编号:1672−7207(2011)S2−0313−06 Coordinated speed and torque control strategy of electric multidriving wheels travel mechanism in deep sea environmentsHE Yao, Y ANG Jue, ZHANG Wenming, FENG Yali(School of Mechanical Engineering, University of Science and Technology Beijing, Beijing 100083, China)Abstract: Based on a new type multi wheels travel mechanism driven by hub motors in deep sea environment, the velocity relationship of the driving wheels was studied when the articulated body was steering on flat road, which provided scientific basis for each hub motor speed control rule while steering. Virtual prototype was used to simulate processes of crossing obstacles and slope climbing. The torque output character of each motor was obtained and analyzed.According bearing force change law of each wheel, the basis for torque control strategy in these cases was determined.Key words: multi driving wheels vehicle; drive by hub motors; output torque; control strategy本文作者介绍了一种新型的铰接式复合轮式车辆,该车辆具有可变的多轮式行驶机构,每个轮子均 采用独立轮毂电机驱动,可实现针对海底复杂路况越 障行驶,结合液压控制的轮向机构,能够完成在复杂 路面条件下的行驶工况 [1−3] 。
由于采用独立式轮毂电机 驱动,电机的控制策略将决定行驶机构的行驶和通过 性能。
本文作者分析了行驶机构在水平路面转向过程 中各驱动轮的相对转速关系,由此确定各驱动电机在 转向时的转速需求; 运用计算机多体动力学仿真技术, 对车辆动力学模型进行仿真分析,得出车辆越障的理 论数据,评估车辆行驶性能。
1 电传动复合轮式行驶机构行驶机构,包括铰接式车架及安装在铰接式车架 两侧的四组复合轮系,如图 1 所示。
每一组复合轮系 包括前连接臂、前轮、中轮、后轮、后连接臂,控制 油缸;前轮、中轮和后轮通过连接轴分别安装在前连 接板和后连接板上, 每个驱动轮由轮毂电机单独驱动, 如图2所示。
收稿日期:2011−06−15;修回日期:2011−07−15基金项目:国家自然科学基金资助项目(50874006);国际海底区域性研究开发“十一五”项目(DYXM115040203)通信作者:杨珏(1975−),男,北京人,副教授,从事工程车辆设计;电话:01062332467;Email: yangjue@中南大学学报(自然科学版) 第 42 卷314 1—前车架;2—后车架;3—复合轮系 图1 电传动复合轮式行驶机构Fig.1 Electric multi driving wheelstravel mechanism1—前连接臂;2—连接轴;3—控制油缸;4—后连接臂;5—后轮;6—中轮;7—前轮 图2 轮毂电机驱动的复合轮系 Fig.2 Multi wheels driven by hub motors采用主动控制的方式进行越障,攀越台阶、凸台 等障碍时,前轮抬起,由前轮系的拖动作用及后轮系 的推力使复合轮系越过台阶、凸台等障碍物。
最大跨 沟宽度为复合轮系前后轮的轴间距。
2 驱动电机的选择及控制算法电驱动的海底行驶机构可以选用的电机有交流感 应电机、开关磁阻电机、永磁同步电机和永磁无刷直 流电机,交流感应电机功率因数较低,重量功率比大, 开关磁阻电机在低速时转矩波动较大。
永磁电机可分 为由方波驱动的永磁无刷直流电机和由正弦波驱动的 永磁同步电机,永磁无刷直流电机采用霍尔位置传感 器或电机反电势的方法,性能更佳,直流电压利用率 也比较高。
在本行驶机构驱动系统中无刷直流电机驱 动器采用电流、转速双闭环控制算法结构。
图 3 所示为电机驱动器控制算法结构图 [4−5] 。
图3 电机驱动器控制算法Fig.3 Control algorithm of motor controller3 转向过程各驱动轮转速输出要求及协调控制行驶机构采取铰接式车身,转向过程中内外侧车 轮以及同一组车轮中不同位置的驱动轮都存在转速 差,这种差别可以通过车身转向过程中的几何关系准 确地表示,从而得到每个驱动轮转速输出的控制依 据 [6] 。
转向机构的设计标准为对任一转角 θ,前、后复 合轮系中各个中间轮均做纯滚动,即转动中心为前、 后轮系中轮轴线的交点,最大设计转角为 45°。
由于 复合轮系的结构特点,转向时各个复合轮系的前、后 轮除做纯滚动外,势必会有一定的滑移。
转向过程中 电机协调控制的核心思想是通过调节电机转速,使各 个前、后轮的滑移量最小。
为描述方便,先对各个轮系及轮子编号。
令前内 侧复合轮系、前外侧复合轮系、后内侧复合轮系、后 外侧复合轮系分别为轮系Ⅰ、轮系Ⅱ、轮系Ⅲ和轮系 Ⅳ。
轮系Ⅰ前、中、后轮分别为W 1,W 2 和W 3;轮系 Ⅱ前、中、后轮分别为W 4,W 5 和W 6;轮系Ⅲ前、中、 后轮分别为W 7,W 8 和W 9;轮系Ⅳ前、中、后轮分别 为W 10,W 11 和W 12。
令O i (i =1, 2, …, 12)为W i 的几何中心点,v i 为O i点的速度,v i 方向沿W i 滚动方向向前,如图4所示。
以转向过程中的某一转角θ 为例,分析各个轮胎 的转速情况。
A 点为前后车架铰接点,O 点为瞬时转 动中心。
对应任意θ 角,轮系Ⅰ、Ⅱ与轮系Ⅲ、Ⅳ始 终沿直线OA 对称, 研究时仅考虑后车架上轮系即可。
研究后车架上的轮i (i =7, 8, …, 12),令各轮中心 点 O i 到 O 点的距离为 L i , i OO 与 8 OO 的夹角为 i a , 即 i i L O O = , 8 i i O OO a =Ð 。
若整车沿O 点转动的角 速度为ω,为使各轮的滑移量最小,应满足W i 沿OO i 的切向方向做纯滚动,即:cos ii iL v w a × = ur (1)增刊 2 何耀,等:深海电驱动复合轮式行驶机构转速和转矩协调控制策略315图4 转向过程中的速度关系Fig.4 V elocity relation of wheels when steering根据几何关系,可得:9 7 v v = , 1210 v v = (2)转动过程中轮8和轮11始终做纯滚动, 分别以速 度v 8 和v 11 为基准, 根据已知参数, 可以得出θ从0~45° 变化时,v 7/v 8 和v 10/v 11 的变化曲线,如图5所示。
1—v 7/v 8; 2—v 10/v 11图5 转动过程中的相对转速差Fig.5 Relative velocity difference of wheels when steering由图 5 可以看出:转角 θ 增大时,v 7/v 8 和 v 10/v 11均单调增大,但相对转速差都很小,最大转速差仅为 2.6%,而在常用的转角范围 (0,35) q ΰ 时,最大相对 转速差为1.2%。
在驱动电机控制策略中可以忽略这个 转速差的影响,让各复合轮系的内部各轮转速相等, 即:9 8 7 v v v = = , 1211 10 v v v = = (3)研究转向时内外轮系的车速关系, θ从0~45°变化 时 v 8/v 11 的变化曲线如图 6 所示。
以外侧车轮速度 v 11 为基准,转向时需控制内侧轮系车速v 8 为:图6 转向时内外轮系的车速关系Fig.6 V elocity relationship between inner and outer wheelswhen steering2 811 (0.000 20.023 90.991 5) v vq q =-+ (4)由式(3)和(4)可以得出:在任意转角θ下,各轮相 对W 11 的转速关系,即只需监测v 11 和θ的变化,即可 知道其他各轮的转速控制需求。
4 越障过程的转矩协调控制越障过程中,各轮系中每一个驱动轮的对地接触 状态会发生改变,而在附着条件不变的情况下,为充 分利用各驱动轮的路面附着系数,应使驱动力矩的输 出与驱动轮对地正压力成正比,即:F N j =× (5)其中:F 为驱动力;N 为驱动轮对地正压力;j 为路 面附着系数。