第2章 弹性力学基础和地震波
第二讲-弹性力学基础知识

弹性力学及有限元
NORTHEASTERN UNIVERSITY
2.1
弹性力学的基本假设
2. 均匀性假设
•—— 假设弹性物体是由同一类型的均匀材料组成的。 —— 假设弹性物体是由同一类型的均匀材料组成的。 因此物体各个部分的物理性质都是相同的, 因此物体各个部分的物理性质都是相同的,不随坐标位 置的变化而改变。 置的变化而改变。 •—— 物体的弹性性质处处都是相同的。 —— 物体的弹性性质处处都是相同的。 •工程材料,例如混凝土颗粒远远小于物体的的几何形状, 工程材料,例如混凝土颗粒远远小于物体的的几何形状, 工程材料 并且在物体内部均匀分布,从宏观意义上讲, 并且在物体内部均匀分布,从宏观意义上讲,也可以视 为均匀材料。 为均匀材料。 •对于环氧树脂基碳纤维复合材料,不能处理为均匀材料。 对于环氧树脂基碳纤维复合材料,不能处理为均匀材料。 对于环氧树脂基碳纤维复合材料
三 应力的概念
通常将应力沿垂直于截面和平行于截面两个方向分解为
τ
σ
S
正应力σ 切应力τ
弹性力学及有限元
NORTHEASTERN UNIVERSITY
2.2
弹性力学基本概念
三
应力的概念
应力分量
应力不仅和点的位置有关,和截面的 方位也有关。 描述应力,通常用一点平行于坐标平 面的单元体,各面上的应力沿坐标轴
独立应力分量:
τ xy = τ yx
τ yz = τ zy
τ xz = τ zx
σx σy σz
τ xy τ yz τ zx
弹性力学及有限元
NORTHEASTERN UNIVERSITY 2.2 弹性力学基本概念
三
应力的概念-举例
例3 已知单元体各面上的应力分量,试在单元上标出方向与数值。
《地震波理论》复习最终版
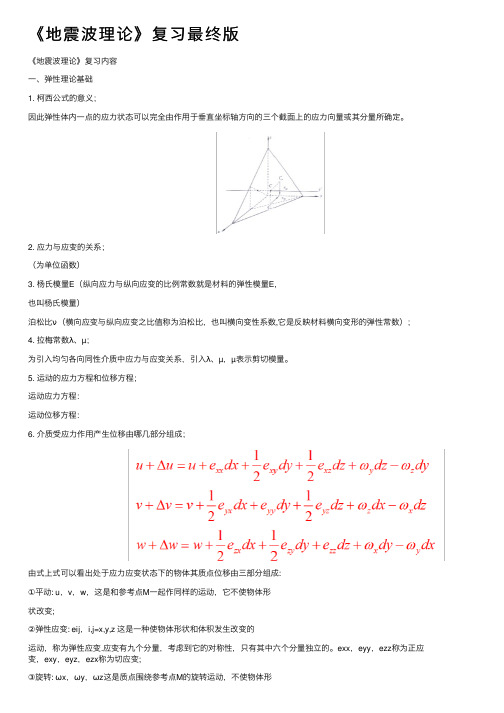
《地震波理论》复习最终版《地震波理论》复习内容⼀、弹性理论基础1. 柯西公式的意义;因此弹性体内⼀点的应⼒状态可以完全由作⽤于垂直坐标轴⽅向的三个截⾯上的应⼒向量或其分量所确定。
2. 应⼒与应变的关系;(为单位函数)3. 杨⽒模量E(纵向应⼒与纵向应变的⽐例常数就是材料的弹性模量E,也叫杨⽒模量)泊松⽐ν(横向应变与纵向应变之⽐值称为泊松⽐,也叫横向变性系数,它是反映材料横向变形的弹性常数);4. 拉梅常数λ、µ;为引⼊均匀各向同性介质中应⼒与应变关系,引⼊λ、µ,µ表⽰剪切模量。
5. 运动的应⼒⽅程和位移⽅程;运动应⼒⽅程:运动位移⽅程:6. 介质受应⼒作⽤产⽣位移由哪⼏部分组成;由式上式可以看出处于应⼒应变状态下的物体其质点位移由三部分组成:①平动: u,v,w,这是和参考点M⼀起作同样的运动,它不使物体形状改变;②弹性应变: eij,i,j=x,y,z 这是⼀种使物体形状和体积发⽣改变的运动,称为弹性应变.应变有九个分量,考虑到它的对称性,只有其中六个分量独⽴的。
exx,eyy,ezz称为正应变,exy,eyz,ezx称为切应变;③旋转: ωx,ωy,ωz这是质点围绕参考点M的旋转运动,不使物体形状和体积发⽣改变,不属弹性应变范畴.7. 导出拉梅⽅程的前提条件;在对空间求导时,只有λ、µ不随空间变化,即在均匀介质中才能导出拉梅⽅程。
8. 能流密度。
表⽰在单位时间内通过与它垂直的单位截⾯积的机械能。
⼆、弹性动⼒学中的基本波1. 由拉梅⽅程导出纵波、横波⽅程;拉梅⽅程对上式进⾏散度运算,得到:对上式进⾏旋度运算,得到:2. 平⾯波、不均匀平⾯波;平⾯波:等相位为平⾯,且与波的传播⽅向垂直的波动。
不均匀平⾯波:平⾯波传播的⽅向余弦为l 、m 、n 是复数,这样的波为不均匀平⾯波。
3. 在什么情况下才能称为平⾯波;离震源较远时可以将在局部等相位内,将点震源产⽣的球⾯波看成⼀个平⾯。
《地震波运动学》PPT课件
(2)当测线平行于地层走
相等。此时,射线平面是铅直的 ,在该平面内可见到界面的法
线深度h,即 h Vav t0 / 2 ,表示 界面到O点的垂直距离。而从O
点垂直地面向下到界面的深度 称为真深度,也称之为铅垂深 度或钻井深度。界面的法线深
度h与真深度hz之间有下列关系
: hz h / cos
真深度、法线深度的关系
测线平行界面走向时深度间的关系
x
x
R
Ds
A
C
h
1
2
φ
C h C
I
R
B
倾斜界面反射波时距曲线的特点
t
1 v
x2 4h2 4xhsinφ
1、时距曲线为双曲线;
2、xm = ∓2hsinφ 是时距曲线极小点的横坐
标,极小点相对激发点偏向界面上倾一侧;
3、在极小点处,反射波返回地面的时间最短,
tm=2hcosφ/v
4、 xm 点实际上就是虚震源在测线上的投影,
多次覆盖剖面上的特殊波
回转波的水平叠加剖面(a)和偏移剖面(b)
第五节 地震反射的时间记录剖面
原始的地震资料上,地下地质界面是 以双曲线型的时距曲线表现出来的, 水平界面的时距曲线是一条双曲线, 倾斜界面的时距曲线也是一条双曲线, 很显然,时距曲线不能直观地反映实 际的地下界面。
时间记录剖面:用时间来标定同相轴 所代表的界面深度的地震记录。
2、断面反射波的时距曲线为双曲线;
3、特点:倾角大;反射波振幅强度变化 大;断点有可能产生绕射。
4、地质意义:指示断层的存在及大致的 位置。
三、凹界面上的反射波
凹界面按其具体特点又可分为几种 情况
圆弧的曲率半径为ρ界面的埋藏深
地震波动力学演示文稿
视
波
长
的
倒数称波数
k
1 *
,即 单 位 距 离 内 波 的
数目。
成都理工大学信息工程学院
目前十八页\总数四十八页\编于十九点
图1.1.11 波的振动图形
图1.1.12 波剖面图
成都理工大学信息工程学院
目前十九页\总数四十八页\编于十九点
视 波 长 * 、波 数 分 量 (k 一 般 沿 地 表 观 测 就 是 , k x 也 有 人 称 之 为 视 波 数 ) 和 视 速 度 V* 之 间 有
1.2.2 振 动 图 和 波 剖 面
根 据 波 动 方 程 达 朗 贝 尔 解 , 函 数 C1( ) 中 的 自 变
量
t
r
V
a
,
既
是
时
间
t 又是空间
r 的函数,即
u=u(t,r), 因 此 就 可 以 从 不 同 的 角 度 描 述 波 动 。 若
在 某 一 确 定 的 距 离 上 r r1 观 测 该 处 质 点 位 移 随 时 间 的 变 化 规 律 图 形 , 令 横 坐 标 表 示 时 间t , 纵 坐 标表 示 质 点 位 移 u , 这 种 由 u 坐 t 标 系 表 示 的 图 形 称 波 的 振 动 图 形 。 如 图 1.1.11 所 示 ,
有确定起始时间和有限能量,在很短时间内衰减的一个信
号。地震子波振动的一个基本属性是振动的非周期性 。因此,它的动力学参数有别于描述周期振动的振 幅、频率、相位等参数,而用振幅谱、相位谱(或 频谱)等概念来描述。
成都理工大学信息工程学院
目前二十一页\总数四十八页\编于十九点
地震波的动力学特征既可以用随时间而变化的波形来 描写,也可以用其频谱特性来表述。前者是地震波的时间
第二章 固体弹性力学基础

应力定义为:单位面积上所受的内力,是在面力或 体力作用下,物体内部假想面上单位面积上的一对 大小相等、方向相反的力,是作用在该面上力的大 小的度量。
应力也称为胁强(力的强度):应力并不是一个 “力”,因为它的量纲不是力而是单位面积上的力。
应力的方向与作用力的方向相反。
6
2.1 应力分析
16
2、非均匀变形 用物体内部变形 单元体(应变椭 圆)表示非均匀 变形 ——褶皱
17
2.2.3 应变分类
应变---当弹性体受到应力作用后,将发生体积和形 状的变化,即应变。
体积形变----指物体只发生体积变化而无形状变化的 应变。它是受正应力作用的结果。 形状形变-----物体只发生形状的变化。它是剪切应力 作用的结果。 理论力学是研究物体的整体运动。把物体作为一种刚 体,在外力作用下只能产生整体平移和转动。 弹性力学不仅要考虑物体的整体运动,而且要研究物 体内部各质点的相对运动,相对运动是产生应变的必 要条件。
设N为M 邻近点,其向径 为 r dr 。受力后N点位移 到 N ,它的位移向量记 为 u(r dr) 。 N点对M点的相对位移是
z
N (x+dx,y+dy,z+dz)
dr
M (x,y,z)
u (r )
u( r )
u (r dr)
N
u(r dr) u(r)
dx 1。由 (1-9) ds
u e e xx x
同理可求得沿y和z轴上单位长度得伸长值
e e yy
e e zz
v y w z
28
(2)切应变:变形体不仅在三个坐标方向上有相对伸长(或 压缩),而且还会产生旋转,即夹角也会发生变化。(见下图) 假设两个正交线元素 MN和MP。受力后, 相对位移分别是du1 和du2。假设: dx=|MN|=|dr1| dy=|MP|=|dr2| MN、MP的相对位移 du1和du2对可由(11)式求出。
第2章 弹性力学基础
第2章弹性力学基础内容提要:本章主要介绍弹性力学的基本概念,主要包括应力、应变的定义和性质,应力平衡方程、几何方程和物理方程,并对弹性力学问题的基本求解方法进行简介。
为了便于对机械结构有限元计算结果能够很好地分析评价,本章还介绍了结构强度与失效的基本理论。
有关能量法的简单知识是后续有限元法的重要理论基础。
教学要求:学习掌握应力、应变基本概念和主要性质,掌握弹性力学基本方程、应力边界条件、协调方程等,了解弹性力学平面问题的应力函数法,掌握结构强度失效准则中的等效应力理论等内容,了解能量法的基本思想。
2.1 引言弹性力学(Elastic Theory)作为一门基础技术学科,是近代工程技术的必要基础之一。
在现代工程结构分析,特别是航空、航天、机械、土建和水利工程等大型结构的设计中,广泛应用着弹性力学的基本公式和结论。
弹性力学与材料力学(Foundamental Strengths of Materials)在研究内容和基本任务方面,是基本相同的,研究对象也是近似的,但是二者的研究方法却有较大的差别。
弹性力学和材料力学研究问题的方法都是从静力学、几何学、物理学三方面入手的。
但是材料力学的研究对象是杆状构件,即长度远大于宽度和厚度的构件,分析这类构件在拉压、剪切、弯曲、扭转等几类典型外载荷作用下的应力和位移。
在材料力学中,除了从静力学、几何学、物理学三方面进行分析外,为了简化推导,还引用了一些关于构件的形变状态或应力分布的假定(如平面截面的假定、拉应力在截面上均匀分布的假定等等)。
杆件横截面的变形可以根据平面假设确定,因此综合分析的结果,即问题求解的基本方程,是常微分方程。
对于常微分方程,数学求解是没有困难的。
而在弹性力学里研究杆状构件一般都不必引用那些假定,所以其解答要比材料力学里得出的解答精确得多。
当然,弹性力学在研究板壳等一些复杂问题时,也引用了一些有关形变状态或应力分布的假定来简化其数学推导。
但是由于弹性力学除研究杆状构件之外,还研究板、壳、块,甚至是三维物体等,因此问题分析只能从微分单元体入手,以分析单元体的平衡、变形和应力应变关系,因此问题综合分析的结果是满足一定边界条件的偏微分方程。
弹性力学基础知识

第二章弹性力学基础
图二半轴有限元模型
一、应力分量与平衡微分方程
空间独立的应力分量正应力分量:切应力分量:应力分量列阵: x y z σσσ xy
yz zx
τττ{} T
x y z xy yz zx σσσστττ⎡⎤=⎣⎦
注意下标的意义与符号规定!!
(2-1)
⎤
二、几何方程
空间独立的应变分量正应变分量:切应变分量:应变分量列阵:(2-3)
z y x εεε,,zx yz xy γγγ,,{}T
zx yz xy z
y x
][γγγεεεε=如何计算正应变和切应变??
y
⎤⎥
五、虚功原理
虚位移:满足物体内变形连续条件,边界上位移约束条件的任何可能的无限小位移。
虚功:真实外力在虚位移上所做的功。
虚应变:对可变形的弹性体,虚位移也必将导致虚应变,虚应变和虚位移之间满足弹性体几何方程。
虚功原理:外力作用下处于平衡状态的弹性体,外力在虚位移上做的总虚功等于弹性体内真实应力在虚应变上做的总虚变形功。
x F Vx
F C
C。
弹性力学简明教材(电子版)
弹性力学简明教材(电子版)
本教材旨在对读者简明地阐述弹性力学的基本概念和公式,涉
及弹性体的基本特性,力学基本定律,应力应变状态的描述和计算,以及弹性体固有振动和波的传播等内容。
第一章弹性体的基本特性
本章介绍了弹性体的基本特性,包括弹性体的定义、分类、形
变和应力等概念,以及材料的弹性模量和泊松比等基本参数。
通过
本章的研究,读者将会了解弹性体的基本特性,为后续章节的研究
打下基础。
第二章力学基本定律
本章介绍了力学基本定律,即牛顿定律和能量守恒定律,以及
它们在弹性力学中的应用。
通过本章的研究,读者将会了解力学基
本定律的含义和应用。
第三章应力应变状态的描述和计算
本章介绍了应力应变状态的描述和计算方法,涉及应力应变张量和应力应变关系等内容。
通过本章的研究,读者将会了解弹性体中应力应变关系的基本概念和计算方法。
第四章弹性体固有振动和波的传播
本章介绍了弹性体固有振动和波的传播,包括弹性体的本征频率和本征振型,以及弹性波的类型和传播速度等内容。
通过本章的研究,读者将会了解弹性体固有振动和波的传播,为实际问题的解决提供理论基础。
第五章应用实例分析
本章通过实际问题的分析和计算,综合运用前面章节所学的知识,掌握弹性力学在实际工程中的应用。
通过本章的研究,读者将会了解如何分析和解决实际弹性力学问题。
附录:本教材的符号表和计算公式等内容,供读者参考。
总结
弹性力学是工程力学的重要分支之一,具有广泛的应用。
本教材对弹性力学的基本概念、公式和应用进行了简要的阐述,适合初学者学习和工程技术人员参考使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
则: du 0 1
e12 0 0
du2 e21 du 3 0
0 dx1 0 dx2 0 dx3
即:
du1 e21 dx2轴之间的夹角变化的一半,称为切应变 它是每边旋转的角度(弧度,不是度数!)。 x1和x2 轴之间的夹角通常为p/2,变形后变成:= p/2-2e12
du 0
u1 x1 du 1 u 2 du2 x du 1 3 u 3 x 1
令
u1 x1 u 2 J x1 u 3 x 1
u1 x 2 u 2 x 2 u 3 x 2
dv
V
fdV
:体积V上的力
f
例如,重力引起的体力为 f g (方向向下)
2015-7-6 2
面力(Surface Force)是介质中某局域平面上受到的力,力 的大小与面积成正比,压强或应力是最常见的面力。
弹性力学中定义为单位面积的力.用 f 表示 s
f s dS :作用在微元dS面上的力
u1 x3 u 2 x3 u 3 x3
eΩ
(eij e ji ),这里旋转张量W是反对称的 应变张量e是对称的
我们可以把矩阵J 分成对称和反对称部分,把刚性旋转部分离出来。
2015-7-6 13
应变Strain
应变张量e 旋转张量W
1 u1 u 2 ( ) 2 x 2 x1 u 2 x 2 1 u 3 u 2 ( ) 2 x 2 x3 1 u1 u 3 ( ) 2 x3 x1 1 u 2 u 3 ( ) 2 x3 x 2 u 3 x3
, x2 , x3 x1
)
ij 0(i j)
新坐标系下 ij是对角矩阵。 1 1 22 33 叫主应力 , x2 , x3 叫主应力轴。 x1
返回
2015-7-6 11
2.1.2 应变Strain
连续介质的位移包括刚体的平移(Translation)、旋转 (Rotation)和变形(Deformation)。 在弹性理论中,我们主要考虑介质的变形。
O B
n
A O
x2
x3 x1
1n:作用在AB面上的应力在 x1方向的应力分量; 2n:作用在AB面上的应力在 x2方向的应力分量;
S:AB面的面积; S1:OB面的面积; S1 = S cos θ = Sn1 S2:OA面的面积。S2 = S sin θ = Sn2
2015-7-6 6
应力(stress) 2维应力张量(Stress Tensor) 这样,作用在三角形横梁BOA上的力列表为:
1 u1 u 3 ( ) 2 x3 x1 1 u 2 u 3 ( ) 2 x3 x 2 0
则
u1 x1 1 u 2 u1 e ( ) 2 x x 1 2 1 u 3 u1 2 ( x x ) 1 3
e11 e e21 e 31
e12 e22 e32
e13 e23 e33
其中e11 ,e22 ,e33 称为正应变。e12,e13,e23 称为切应变。
由9 个元素组成的应变张量完全描述连续介质中任意一点 的应变。6个独立元素的应变张量。 通常
1 ui u j eij ( ) 2 x j xi
P和Q两点的距离为 dx
两点的位移分别为 u 和u du 如果 u = u + du
即
du = 0
这样 u 仅表示刚体的平移 表示旋转和变形 du
2015-7-6 12
应变Strain
应变张量e 旋转张量W
u1 x 2 u 2 x 2 u 3 x 2 u1 x3 u 2 x3 u 3 x3 dx1 dx2 dx 3
第二章 弹性力学基础和地震波
2.1弹性理论回顾 2.1.1应力 2.1.2应变 2.1.3广义胡克定律 2.2波动方程和地震波 2.2.1均匀弹性杆的一维波动方程 2.2.2三维均匀介质中的波动方程 2.2.3波动方程的解 2.2.4地震P波和S波 2.3地球介质 2.4地震波的衰减
2.1.1应力(stress)
x2 x3 O x1 B
O
n
平衡状态下,合力为零。
得到:
2015-7-6
A
1n 11 n1 12 n2 2 n 21 n1 22 n2
或
1n 11 12 n1 n 22 2 2 n 21
J eΩ
2015-7-6 14
应变Strain
应变张量e
对于应变张量:
u1 x1 1 u u e ( 2 1) 2 x1 x 2 1 u 3 u1 2 ( x x ) 1 3 1 u1 u 2 ( ) 2 x 2 x1 u 2 x 2 1 u 3 u 2 ( ) 2 x 2 x3 1 u1 u 3 ( ) 2 x3 x1 1 u 2 u 3 ( ) 2 x3 x 2 u 3 x3
考虑一个平衡变形弹性体,P点面元dS分正负两个面
n : 单位法向矢量 ,从“-”指向“+”方向。
F- :指负向面元上的受力。 F+ :指正向面元上的受力。 F- + F+ =0 F P点面元dS正向的应力定义为:f n lim dS 0 dS
n =1
-
n
ds
f n :是矢量,单位面积的力,称为应力。
O
x3
x1
物体在x3方向无限延伸,垂直于纸面。
考虑垂直于x1 的面元dS1, 沿x1 正方向的面记为M+, 沿x1负方向记为M-,
B
O
n
A
2015-7-6
4
应力(stress) 2维应力张量(Stress Tensor)
σ11 , σ21 :分别表示作用dS 、M+面上x 和 x 上的应力分量 1 1 2 -σ11 ,-σ21 :分别表示作用dS1、M- 面上x1 和 x2上的应力分量
0 Ω 3 2
3 0 1
2 1 0
旋转张量中当ω1 = ω 2 = 0 , 3 0
du1 0 du2 3 du 0 3 3 0 0 0 dx1 0 dx2 dx 0 3
2015-7-6 17
应变Strain 对旋转张量
W
旋转张量W
旋转张量的物理意义
1 u1 u ( 3 ) 2 x 3 x 1 1 u1 u 1 u 2 u 3 ( 2) 0 ( ) 2 x 2 x 1 2 x 3 x 2 1 u1 u 1 u u 3 ( 3) ( 2 ) 0 2 x 3 x 1 2 x 3 x 2 0 1 u1 u ( 2) 2 x 2 x 1
du1 = e11 dx1 这意味着在x1方向微元dx1变形量为: 表示在 x1方向单位长度的伸展量(-e11表示压缩量)——正应变。
而 x2方向微元dx2的形变量 du2 = 0 x3方向的微元dx3形变量
2015-7-6
du3 = 0
16
应变Strain
应变张量e
切应变的物理意义
如果应变张量中仅 e12 0 和 e21 0
1n 11 12 n1 n 22 2 2 n 21
11 1n 2 n 21 3n 31
12 22 32
x2
第一个下标:截面元上应力分量 方向.第二个下标:截面元的法向矢量 方向 表示曲面法向j、坐标轴i方向 的应力分量
同理,可以考虑垂直于x2 的面元dS2
σij
x3 O x1
B
O
A
2015-7-6
5
应力(stress) 2维应力张量(Stress Tensor) 考虑横截面积无限小三角形横梁BOA内一点P的应力 n1:法向n在 x1方向的分量 n2:法向n在 x2方向的分量
1 u1 u 2 0 ( ) 2 x 2 x1 1 u u Ω ( 1 2 ) 0 2 x x 2 1 1 u 2 u 3 1 u1 u 3 ( ) ( ) 2 x x 2 x x 3 1 3 2
位移表示的应变,应变和位移之间的关系
2015-7-6 15
应变Strain
应变张量e
正应变的物理意义
如果应变张量中仅 e11 0 ,即:
e1 du1 du2 0 du 3 0 0 0 dx1 0 0 dx2 dx 0 0 3
因为对称性,三维应力张量仅有6个独立的元素。
2015-7-6
10
应力(stress)
正应力、切应力和主应力 Normal, Shear, Principal Stresses
我们将作用在dS面上的力分解成两个分量 nn:正应力,平行于面的法向n nt:切应力,垂直于面的法向n 在任意P点,我们选择一个直角坐标系( 使
弹性理论中我们先考虑两种力:体力(Body Force)、面力 (Surface Force) 体力(Body Force):介质内某点单位体积受到的力,力的大 小与体积或质量成正比,常见的体力有重力和离心力等。
f
: 定义为介质中单位质量受的力 :单位体积的体力. :体积为dV 介质受的力
ρf