一种小型高空电动水果采摘机械手装置设计
智能柚子采摘机器人设计
第52卷㊀第4期2024年4月㊀㊀林业机械与木工设备FORESTRYMACHINERY&WOODWORKINGEQUIPMENTVol52No.4Apr.2024研究与设计智能柚子采摘机器人设计丘文佳ꎬ㊀王路平ꎬ㊀李㊀滨(东北林业大学机电工程学院ꎬ黑龙江哈尔滨150040)摘㊀要:智能柚子采摘机器人设计是在其他相关果蔬采摘机器人的基础上进行的迁移㊁类比和改进ꎮ按照智能柚子采摘机器人的功能需求ꎬ选择钣金件来做机械手臂部分ꎬ3D打印的软质光敏树脂做柔性手指ꎬ并选择适宜行走在山丘地带的履带机构以及单片机STC系列控制履带行走和手抓采摘动作ꎮ结合OpenMV以及摄像头等外部设备与避障传感器ꎬ达到对柚子的识别㊁采摘和避障行走ꎮ智能柚子采摘机器大大降低了采摘成本ꎬ间接提高了运输效率ꎬ将更多新鲜柚子及时运送到市场ꎬ同时也将人从采摘柚子这种单一枯燥的劳动中解放出来ꎮ关键词:采摘机器人ꎻ智能化ꎻ图像识别中图分类号:S776㊀㊀文献标识码:A㊀㊀文章编号:2095-2953(2024)04-0045-05DesignofintelligentgrapefruitpickingrobotQIUWen ̄jiaꎬWANGLu ̄pingꎬLIBin(CollegeofMechanicalandElectricalEngineeringꎬNortheastForestryUniversityꎬHarbinHeilongjiang150040ꎬChina)Abstract:Thedesignofthisintelligentgrapefruitpickingrobotisbasedonthemigrationꎬanalogyandimprovementofotherrelatedfruitandvegetablepickingrobots.Accordingtothefunctionalrequirementsoftheintelligentgrape ̄fruitpickingrobotꎬsheetmetalpartsareselectedtomaketheroboticarmpartꎬandsoft3Dprintedphotosensitiveresinisusedasaflexiblefinger.ThetrackmechanismsuitableforwalkinginthehillyareaandtheSTCseriesofmi ̄crocontrollerareselectedtocontrolthetrackwalkingandhandpickingactions.BycombiningOpenMVꎬcameraandotherexternaldeviceswithobstacleavoidancesensorsꎬgrapefruitrecognitionꎬpickingandobstacleavoidancewalkingcanbeachieved.Theintelligentgrapefruitpickingmachinegreatlyreducesthepickingcostꎬindirectlyim ̄provesthetransportationefficiencyꎬdeliversmorefreshgrapefruittothemarketintimeꎬandalsoliberatespeoplefromthesingleboringlaborofpickinggrapefruit.Keywords:pickingrobotꎻintelligentimageꎻrecogniton㊀㊀收稿日期:2023-12-11基金项目:哈尔滨市科技局创新人才基金项目 无人机遥感技术在森林生物量估测中的应用研究 (2017RALXJ011)第一作者简介:丘文佳ꎬ硕士研究生ꎬ研究方向为机械电子工程ꎬE-mail:281552568@qq.comꎮ目前国内柚子采摘主要由人工完成ꎬ柚子树一般高达5~6m左右ꎬ一个柚子的重量大约在0.5~2kg左右ꎬ体积大约是3dm3[1]ꎬ这导致传统的人工采摘柚子的劳动量大ꎬ并且每小时采摘柚子的数量少[2]ꎬ同时伴随着农村人口向城市各行各业的转移ꎬ农村劳动力严重流失ꎬ人口的老龄化问题的也日渐加剧ꎬ使得人力短缺ꎬ进而导致成本逐渐上升ꎬ生产总费用超过一半都被用于采摘方面[3]ꎮ随着机器人技术的快速发展ꎬ提高人类的劳动效率ꎬ减少人类劳动量成为当今备受关注问题ꎬ尤其林业机械与木工设备第52卷是将单调重复的工作用机器来代替是个不可逆转的趋势[4-6]ꎮ采摘水果蔬菜等便是由一系列单调重复的动作组成ꎬ现今世界上果蔬采收领域的技术研究的热点和主要发展方向之一就是采摘机器人[7-8]ꎮ目前ꎬ世界各国科研人员已经探索出用成熟的果蔬与枝干叶子在光学及色彩学参数上不同的这一大区别来将自然种植环境下(包括大棚种植)熟了的果蔬与其他物体相区别开来ꎮ实践中采用这一理论ꎬ发明了苹果采摘机器人㊁草莓采摘机器人等一系列的自动识别采摘的农业机器人[9]ꎮ为了降低柚子采摘成本ꎬ提高柚子运输效率ꎬ将更多新鲜的柚子及时运送到市场ꎬ同时也将人从采摘柚子这种单一枯燥的劳动中解放出来ꎬ本文设计使用智能柚子采摘机器人来取代传统的人工采摘柚子ꎮ1㊀执行环节的选择与设计1.1㊀采摘部分主要参数确定通过查阅资料ꎬ可知道柚子树在修剪时要去除顶端优势ꎬ以便提高产量ꎬ是以修剪柚子树常控制在3m以内ꎬ而一个柚子的质量约在0.5~2kgꎬ所以设计智能柚子采摘机器人的机械手部分末端负载为3kg左右[10]ꎬ果实中等大小ꎬ类似梨型呈扁圆形ꎬ纵径5~13.5cmꎬ横径4.3~16cmꎬ一个柚子体积大约在3dm3ꎬ据此本智能柚子采摘机器人的采摘部分机械手(用不锈钢钣金作为材料)的靠近腰部臂和靠近手部臂的重量和尺寸设计如下:靠近腰部臂的第一和第二关节轴之间的距离为526mmꎻ靠近腰部臂的质量为M1(大约6kg左右)ꎻ靠近腰部臂的重心在距离第一关节轴291mm处ꎬL1=291mmꎻ靠近手部臂的从第二个关节轴到手抓旋转部的距离是600mmꎻ靠近手部臂的质量为M2(大约6.5kg左右)ꎻ靠近手部臂的重心在距第二个关节轴386mm处ꎬL2=526+386=912mmꎮ本智能柚子采摘机器人的采摘部分的腰部的质量和尺寸设计如下:旋转轴(舵盘中心)与舵机中心距离为25mmꎻ腰部的质量为23kgꎮ本智能柚子采摘机器人的采摘部分机械手的基本设计参数如下:负载为3kgꎻ靠近腰部臂回转:0~90ʎꎬ60ʎ/sꎻ靠近手部臂回转:0~135ʎꎬ60ʎ/sꎻ腰部旋转:0~360ʎꎬ60ʎ/sꎻ手抓夹持半径:143~160mmꎮ1.1.1㊀靠近腰部臂的舵机的选择当智能柚子采摘机器人的机械手的手臂旋转到腰部ꎬ靠近腰部臂和靠近手部臂以一条直线形式展开时ꎬ转动惯量此时达到它可以达到的最大值ꎬ以此推断舵机在旋转开始时可以产生的转矩会有所不足ꎮ根据平行轴定理我们知道绕靠近腰部臂轴的转动惯量如下:J1=JG1+M1L12+JG2+M2L22(1)已知:M1=6kgꎬM2=6.5kgꎬ且L1=291mmꎬL2=912mmꎮJG1≪M1L12ꎬJG2≪M2L22ꎬ故JG1㊁JG2可忽略不计ꎬ所以绕大臂轴的转动惯量为:J1=M1L12+M2L22=5.19kg m2已知:M2=6.5kgꎬL4=386mmꎬ同理可得ꎬ小臂绕小臂的关节轴ꎬ其转动惯量为:J2=M2L42=0.97kg m2本智能柚子采摘机器人的腰部旋转轴的转动惯量为ꎬ腰部的舵机中心被舵盘盘桓的转动惯量ꎬ与靠近腰部臂㊁靠近手部臂绕其腰部关节的旋转轴的转动惯量相加的和ꎮ已知M3=23kgꎬL5=24.8mmꎬ所以按照以上的分析步骤ꎬ最终知道腰部的转动惯量:J0=J1+J3=J1+M3L52=5.92kg m2(2)其中为J3舵盘绕腰部的舵机中心的转动惯量ꎮ设靠近腰部臂的速度ꎬω1=60ʎ/sꎬ则旋转开始时ꎬ转矩表示如下:T=Jα(3)其中T为旋转开始时转矩ꎻJ为转动惯量ꎬkg m2ꎻα为角加速度ꎬrad/s2ꎻ设定本智能柚子采摘机器人的机械手的靠近腰部臂ꎬ从ω0=0启动到ω1=60ʎ/sꎬ预计可能需要的时间是Δt=0.2sꎬ取安全系数为2ꎬ由式(3)得:TOUT1=2T1=2ˑJ1ˑα1=2ˑJ1ˑω1-ω0Δt=61.8N m(4)综上ꎬ选择舵机型号RDS3218ꎮ1.1.2㊀靠近手臂旋转舵机的选择设腰部的速度ω3=60ʎ/sꎬ原理和上述靠近腰部臂一样ꎮ设定本智能柚子采摘机器人的机械手的腰部ꎬ从启动ω0=0到ω3=60ʎ/sꎬ预计可能需要的时间是Δt=0.2sꎬ取安全系数为2ꎬ由式(3)得:TOUT2=2T2=2ˑJ2ˑα2=2ˑJ2ˑω2-ω0Δt=20.3N m(5)综上ꎬ选择舵机型号RDS3218ꎮ64第4期丘文佳ꎬ等:智能柚子采摘机器人设计1.1.3㊀腰部旋转舵机的选择设腰部的速度ω3=60ʎ/sꎬ原理和上述靠近腰部臂一样ꎮ设定本智能柚子采摘机器人的机械手的腰部ꎬ从启动ω0=0到ω3=60ʎ/sꎬ预计可能需要的时间是Δt=0.2sꎬ取安全系数为2ꎬ由式(3)得:TOUT0=2T0=2ˑJ0ˑα0=2ˑJ0ˑω3-ω0Δt=62.0N m(6)综上ꎬ选择舵机型号DDTS380ꎮ1.2㊀夹持部分的设计手抓设计如图1所示ꎮ图1㊀手抓设计1.腕部旋转舵机ꎻ2.手抓坐ꎻ3.手指连接件ꎻ4.曲柄移动机构ꎻ5.手指坐ꎻ6.螺栓等标准件ꎻ7.柔性手指1.3㊀履带机构的设计通过查阅资料可知ꎬ倒梯形的行走机构具有最高的越障宽度和越障高度ꎬ故履带底盘试验平台的行走机构选择倒梯形机构ꎮ履带式行驶装置的组成包括履带㊁张紧轮㊁张紧缓冲装置㊁支重轮㊁托带轮驱动轮5个部分ꎬ其作用是支撑整机的重量ꎬ并通过履带将驱动轮的旋转运动转变为底盘在地面上的行驶运动[5]ꎮ1.4㊀执行机构整体设计执行机构整体设计如图2所示ꎮ图2㊀执行机构整体1.装载箱ꎻ2.行走履带机构ꎻ3.车架ꎻ4.采摘机械臂ꎻ5.采摘机械手抓2㊀控制与识别2.1㊀主程序说明在一开始设定计时/计数器 0 (也就是 十六进制 计数器)工作于计时模式1(TMOD)ꎬ初始值为FF64Hꎬ详细来说就是设定TH0=FFHꎬTL0=CDHꎬ当CDH换算成十进制等于65276ꎬ而整个 十六进制 计数器要数到溢出就必须数到FFFFHꎬ换算成十进制等于65536ꎬ因此本设计的单片机设定的初始值要数到满出来必须经过65536~65276次ꎬ每50次中断一次ꎬ每次中断就执行ꎬ直到R1为0ꎬ然后将其返回200ꎬ直到R4ꎬ一共800次ꎬ我们使用的是24MHz的晶体振荡器ꎬ已知定时器的计时频率是外部晶体振荡器ː12ꎬ计时的频率为24MHzː12=2MHzꎬ把计时频率换算成时间ꎬ也就是说每2μs计时一次ꎬ且每2μs将TL0加1ꎬ即50次花费100μs中断一次ꎬ所以加1计数器溢出位了之后ꎬ得到TF0=1ꎬ在TL0加50次后ꎬ发出中断请求ꎮ接着设定中断使能ꎬ然后设定计时/计数器的中断使能ꎬ将计时/计数器启动ꎬ设计出各舵机的动作角度和速度ꎬ通过改变延时子程序的长短来控制舵机的速度ꎮ定义S1㊁S2㊁S3㊁S4㊁S5寄存器ꎬ每个分别改变S1㊁S2㊁S3㊁S4㊁S5的值ꎬ使中断子程序随着主程序变动ꎬ产生不同的PWM波ꎬ并且在数值前加 # ꎬ使不同关节在不同定位ꎬ也就是运用PWM波来控制舵机ꎬ从而使舵机旋转不同的角度与速度ꎬPWM波如图3所示ꎮ74林业机械与木工设备第52卷图3㊀PWM波2.2㊀中断子程序说明主程序设定好所有的中断值的情况下ꎬ当程序相隔0.1ms执行计时/计数中断子程序一次ꎬ然后利用PUSH指令把子程序会用到的寄存器中的数据放到堆栈区去ꎬ当要返回主程序时ꎬ再利用POP指令取回来ꎮ以此防止在中断子程序中执行时ꎬ破坏主程序会用到的寄存器内的值ꎮ然后手动将中断请求TF0清0ꎬ再重新给一次TH0和TL0初始值ꎬ在下次中断产生时ꎬ防止当加1计数器满了之后ꎬ从0000H开始再加1计数ꎮ子程序中ꎬ一个周期是800次ˑ30μs=24msꎬ将PWM波设为高电平ꎬ然后利用R1来存放想要产生的脉冲宽度的值ꎬ将PWM波设为低电平在经过n次ˑ0.1ms后ꎬ使单片机从引脚P6.0依次输出24ms一个周期的PWM波ꎬ在主程序中任意改变R1的值ꎬ使n相应变化ꎬ产生对应的PWM波脉冲宽度ꎮ单片机从P6.0到P6.4输出PWM波ꎬ而程序中的LOOP段控制机械手臂的每1个动作ꎬ在舵机的调整下ꎬ给寄存器的值为15时ꎬ舵机在中立位置ꎬ22是逆时针到底ꎬ8是顺时针到底ꎬ数值越大ꎬPWM波的脉冲宽度越大ꎬ舵机逆时针转动ꎬ反之结果相反ꎮ运用中断子程序的CYCLE段计算出一个24ms的周期ꎬ并且这个周期开始时P2.0输出为高电平ꎬ将其的脉冲数值存在30H中ꎬ一旦进入中断子程序就使R2加1ꎬ当R2于30H中的数据ꎬ就将P6.0输出低电平ꎬP6.1输出高电平ꎬ以此类推ꎬ当达到24s时ꎬ程序重新执行ꎬ其中R3输出5组信号ꎮ运用中断子程序的CYCLE段计算出一个24ms周期ꎬ并且这个周期开始时P2.0输出为高电平ꎬ将其的脉冲数值存在30H中ꎬ一旦进入中断子程序就使R2加1ꎬ当R2于30H的数据ꎬ就将P6.0输出低电平ꎬP6.1输出高电平ꎬ以此类推ꎬ当达到24s时ꎬ程序重新执行ꎬ其中R3输出5组信号ꎮ2.3㊀图像识别与追踪利用OpenMVꎬ使用外部硬件设备单目摄像机拍摄图片ꎬ然后根据霍夫变换等一系列处理ꎬ并且结合红外避障传感器实现柚子的具体识别与追踪ꎮ2.3.1㊀识别部分因为柚子的形状和颜色与周围的柚子树树叶与枝干等截然不同ꎬ且柚子的形状为近似圆形(在拍摄得到的二维图片中)ꎬ熟果是黄色ꎬ所以可以利用这两个特点来与周围环境进行区别ꎮ使用霍夫变换在图像中查找圆ꎬ大致流程是首先我们进行圆形识别ꎬ然后在识别到的圆形区域内进行颜色统计ꎬ用Lab模式判断区域内最多的颜色是否是黄色ꎮ先导入一张柚子的图片(柚子本身的果实占据图片大部分区域)ꎬ然后在farmebuffer中的目标颜色上圈出一个矩形ꎬ然后便可在LabColorSpace得出三组最大最小数据ꎬ也就是黄色的阈值ꎬ然后引入感光模块来设置摄像头为彩色ꎬ大小设置为VGAꎬ也就是640ˑ480的大小ꎬ然后跳过2000张图片以便在更改设置后感光元件变稳定ꎬ因为默认设置自动白平衡和自动增益是开启的ꎬ所以需要关闭自动白平衡和自动增益来为颜色追踪创造条件(也基于此ꎬ摄像头边上需配备一个夜晚使用的光源ꎬ防止光线对颜色追踪的影响)ꎬ然后创造一个时钟对象来跟踪FPSꎬ也就是用clock来追踪帧率ꎬ接着进入循环更新FPS时钟ꎬ拍摄图片ꎬ也就是从感光芯片(感光芯片是将光信息转化为数字电信号的利器)获得一张图像ꎬ然后返回图像ꎬ通过迭代识别到的圆的区域ꎬ然后画一个矩形标记出圆ꎬ然后进行像素颜色统计ꎬ一定要控制环境的光ꎬ保持光线是相对稳定的ꎬ设定黄色的阈值和Lab的最大值和最小值ꎮ这里的函数会返回一个列表ꎬ如果找到了目标颜色ꎬ用圆形标记出目标颜色区域ꎬ在目标颜色区域的中心画十字形标记ꎬ发出信号到追踪部分ꎬ其中OpenMV在断开电脑的情况下帧率可达到连到电脑情况后的两倍左右ꎬ综上所述当区域内的众数(也就是最多的颜色)ꎬ范围在这个阈值内ꎬ就说明是黄色的圆ꎮ确定L通道ꎬa通道ꎬb通道的众数ꎮ识别到的黄色圆形用黄色的圆框出来ꎮ2.3.2㊀追踪部分OpenMV采用的是单目摄像头(镜头配备有过滤红外光的滤片)ꎬ想要实现测距ꎬ就需要选参照物ꎬ利用参照物的大小比例来计算和柚子的距离ꎮ利用镜头焦距的原理ꎬ通过摄像头里柚子的大小ꎬ计算摄像头与柚子之间的距离ꎮ84第4期丘文佳ꎬ等:智能柚子采摘机器人设计具体操作步骤ꎬ实际就是充分运用机器视觉函数image(包括运用image.lens_corr这个函数来矫正镜头畸变)ꎬ就是先测出这个常数的值ꎬ也就是先让柚子和摄像头分离到两端ꎬ将这步操作得到打印出的摄像头里直径的像素值相乘ꎬ从而得到k的具体数值ꎬ进入循环之后用image.find_blob函数追踪前面已经标记出的黄色圆形框ꎬ通过公式最后得到柚子距离摄像头(也就是智能柚子采摘机器人)距离的结果ꎬ输出距离ꎬ通过串口把距离传输到控制履带的电机的mpu上ꎬ结合红外避障传感器来达到追踪的目的ꎮ3㊀结论(1)对智能柚子采摘机器人的机械结构进行总体方案设计ꎬ按照智能柚子采摘机器人的功能需求ꎬ对其进行结构分析ꎻ针对智能柚子采摘机器人的各个机械部分的各个功能进行多个可行性方案的比较与选择ꎬ选择出具有柔性手指的多手指的单自由度形式的手爪ꎬ其由3D打印的ABS和软性光敏树脂构成ꎬ不锈钢钣金加工配合舵机做旋转关节的采摘机构ꎬ履带行走机构ꎬ内部嵌有缓冲材料聚苯乙烯泡沫板(EPS)的装载机构ꎬ舵机ꎬ薄膜电阻式压力传感器ꎬSTC8A8K64S4ꎬOpenMV并详细介绍了其工作原理和优势ꎮ(2)针对最优方案ꎬ对智能柚子采摘机器人的关键部分进行设计与选型ꎮ首先ꎬ在知道采摘柚子的外部环境条件ꎬ以及柚子本身的参数等前提下ꎬ制定出526mm的大臂和600mm的小臂ꎬ然后运用转动惯量等计算出所需扭矩ꎬ接着选择合适的舵机型号包括RDS3218㊁DDTS380以及STS3032ꎮ然后ꎬ设计出适合智能柚子采摘机器人手抓部分的机构ꎬ并从自由度方面发现其可行ꎮ最后ꎬ查询资料ꎬ进行行走履带机构的选型ꎬ计算出行走履带机构各部分的参数ꎬ包括直径248mm的驱动轮ꎬ直径223mm的张紧轮ꎬ直径150mm的支重轮ꎬ直径130mm的拖带轮ꎮ(3)通过方案对比ꎬ本智能柚子采摘机器人采用单片机控制机械手臂与手抓部分ꎬ通过OpenMV用摄像机拍摄处理图片ꎬ然后实现图像与形状识别ꎬ同时测距ꎬ通过串口通信将信号分别传到机械手部分ꎬ以及行走履带机构部分ꎬ用PWM波控制关节处舵机的旋转角度和速度ꎬ机械手部分配合薄膜电阻式压力传感器ꎬ实现对柚子的无损摘取ꎬ行走机构配合红外避障传感器ꎬ实现路径规划ꎬ在摘取超过装载箱底的长条状薄膜电阻式传感器的限度时ꎬ智能柚子采摘机器人的机械手停止工作ꎬ回到初始位置ꎬ智能柚子采摘机器人回到卸载柚子的地点卸载ꎮ利用CAXA软件绘制装配图ꎬ部件图和零件图ꎮ利用Keil软件和OpenMV软件做控制识别部分ꎮ(4)通过技术进行分析ꎬ比较智能柚子采摘机器人与传统人工采摘柚子这两种形势ꎬ得出结论ꎬ使用智能柚子采摘机器人降低了人工劳动强度ꎬ显著提高采摘柚子的效率ꎬ同时降低采摘柚子的成本ꎮ参考文献:[1]㊀王毅.柑橘采摘机器人咬合式末端执行器关键技术研究[D].重庆:重庆大学ꎬ2021.[2]㊀刘嘉超.基于信息融合的采摘机器人视觉识别与定位系统研究[D].广州:华南理工大学ꎬ2020.[3]㊀陈礼鹏ꎬ穆龙涛ꎬ刘浩洲ꎬ等.基于猕猴桃果萼图像的多目标果实识别方法[J].计算机工程与设计ꎬ2018ꎬ39(6):1738-1744. [4]㊀陈礼鹏.基于机器视觉的簇生猕猴桃果实多目标识别方法研究[D].咸阳:西北农林科技大学ꎬ2018.[5]㊀王毅ꎬ付舜ꎬ张哲ꎬ等.柑橘采摘机器人末端执行器设计与试验[J].中国农业科技导报ꎬ2018ꎬ20(1):69-77. [6]㊀付舜.柑橘采摘机器人末端执行器设计与研究[D].重庆:重庆理工大学ꎬ2018.[7]㊀王滨.猕猴桃采摘机器人目标果实空间坐标获取方法的研究[D].咸阳:西北农林科技大学ꎬ2016.[8]㊀ShigehikoHAYASHIꎬKatsunobuGANNOꎬYukitsuguISHIIꎬetal.RoboticHarvestingSystemforEggplants[J].JapanAgriculturalRe ̄searchQuarterly:JARQꎬ2002ꎬ36(3):163-168. [9]㊀FedericoPallottinoꎬCorradoCostaꎬPaoloMenesattiꎬetal.AssessmentofthemechanicalpropertiesofTaroccoorangefruitunderparallelplatecompression[J].JournalofFoodEngineering.2010(3).[10]㊀熊杰ꎬ兰智高ꎬ谢伟.基于Lab特征模型的兵乓球追踪机器人的设计与实现[J].计算机测量与控制ꎬ2018ꎬ26(12):230-233+282.94。
水果采摘机械臂设计

水果采摘机械臂设计引言水果采摘是一项繁琐且费时的工作。
传统的人工采摘方式不仅劳动强度大,而且效率低下。
为了解决这个问题,设计和开发一台水果采摘机械臂成为了一种可行的选择。
本文将介绍水果采摘机械臂的设计原理、结构和工作过程。
设计原理水果采摘机械臂的设计基于计算机视觉和机器人学的原理。
首先,利用计算机视觉技术,对水果进行识别和定位。
然后,机械臂根据识别结果进行路径规划,以最短路径的方式前往目标水果的位置。
最后,机械臂通过夹爪或其他采摘工具进行采摘。
结构设计机械结构水果采摘机械臂主要由基座、臂体、关节、末端执行器等组成。
基座用于提供机械臂的稳定支撑,臂体由多段连接的杆件构成,关节用于连接相邻的臂体段,以实现机械臂的灵活运动。
末端执行器即水果采摘工具,它可以是夹爪、吸盘等,用于固定和采摘水果。
传感器在水果采摘机械臂中,传感器起着至关重要的作用。
通过安装距离传感器,可以实现对机械臂末端执行器与水果之间的距离测量和控制;通过安装力传感器,可以实现机械臂与水果的接触力检测,避免对水果造成损害;通过安装图像传感器,可以实现对水果的识别和定位。
工作流程1.图像采集:机械臂通过安装图像传感器来采集水果图像。
2.图像处理:利用计算机视觉技术对采集到的图像进行处理,实现对水果的识别和定位。
3.路径规划:根据水果的位置信息,机械臂进行路径规划,找到最短路径到达目标水果。
4.运动控制:根据路径规划结果,控制机械臂的关节运动,使机械臂到达目标水果的位置。
5.采摘水果:到达目标水果位置后,机械臂通过末端执行器进行水果的采摘。
6.返回初始位置:采摘完成后,机械臂返回初始位置,准备进行下一次采摘。
总结水果采摘机械臂的设计考虑了计算机视觉和机器人学的原理,通过识别和定位水果,实现了自动采摘的过程。
机械臂的结构和传感器的应用使其能够在复杂的环境下准确、高效地完成水果采摘任务。
随着技术的进步,水果采摘机械臂将逐渐替代传统的人工采摘方式,提高采摘效率,降低劳动强度。
一种新型自动化水果采摘机械的设计
作者 简介 张新磊 (1997-),男,本科,研究方向,机械设计制造。
机 械手 的装 配 ;最 后通 过 选用 PrO/E中的机 构 模式 ,经过 旋 转轴
的自定义,伺服电机的添加,定义初始条件等完成机械手的运动 通讯作 者
仿真 。模型 见下图
李春雪(1984-),女,辽宁本溪人,研究生,研究方向,机械设计制造。
要 采用 灰 度阈 值 、颜 色色 度法 和几 何形 状 特 性等 方 法。②果实 的 目前 ,在果 蔬 机 械采 摘 过 程中 ,迫切 要求 农 业机 器人能 实现 一些
损 伤率 较 大。③果 实的 平均 采 摘 周期 较长 。目前 的果 实收 获机 器 果蔬 抓持 和操 作的 稳定性 ,具 有力闭环 控制 的抓取 手或 采摘 机构
续原 始的 手工 采摘 ,不仅 工作 环境 十分 的艰苦 ,效率低 下,而且 水 果采 摘 质量 也得 不到 保障 ,更甚 至 时有采环境 的 复杂不 小 心从树上 摔 下而 受伤 的事故 发 生 。为了适 应
当代 果 蔬 经济 的发 展 ,设 计 一种 多 自由度 ,满 足 工作 空 间 的小 型
柑橘 采 摘 机 械手 对 实现 农 业 自动化 和 提高 经 济 效益 具 有 重要 意
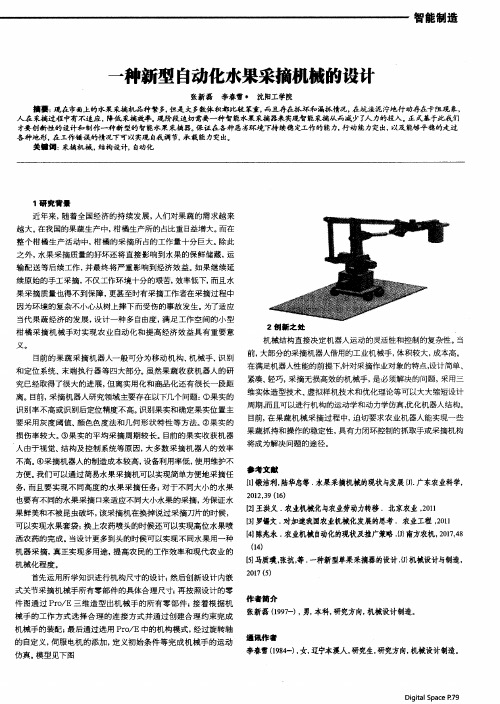
2刨 新之 处
义 。
机 械结 构直接 决 定机 器人运 动的 灵活性和 控制 的复杂 性 。当
前 ,大部分 的采 摘机 器人借用 的工业机 械手 ,体积 较大 ,成本 高。 目前 的果 蔬 采 摘 机 器人一 般可分 为移 动机 构 、机 械 手、识 别
可以实 现水 果套 袋 ;换 上农 药喷 头的 时候 还可 以实现高 位 水果 喷 【3】罗锡文 .对加速我国农业机械化发展的思考 .农业工程 ,2011
全国大学生机械工程创新设计大赛获奖案例《旋转式苹果采摘机械手》
旋转式苹果采摘机械手本案例荣获全国大学生机械工程创新设计大赛一等奖1.设计目的我国是世界上最大的苹果生产国和消费国,苹果种植面积和产量占世界总量的40%以上,在世界苹果产业中占有重要地位。
根据苹果树的生长和栽培特性,将所设计苹果釆摘机械手的适用范围设定为:果实直径50〜100 mm,树高3〜4 m,进行采摘作业的人员身高170 cm左右。
目前我国苹果果园面临的一大困难就是没有操作简单且成本低的苹果采摘器,无法高效釆摘苹果。
采摘苹果不仅要耗费大量人力资源,还要花费大量时间与精力进行搬运,且要保证苹果的完整度,同时对离地3 m左右的果实进行采摘具有很大的危险性。
综合以上因素,我们设计了一个危险系数较小、方便果农进行苹果釆摘的旋转式苹果采摘机械手。
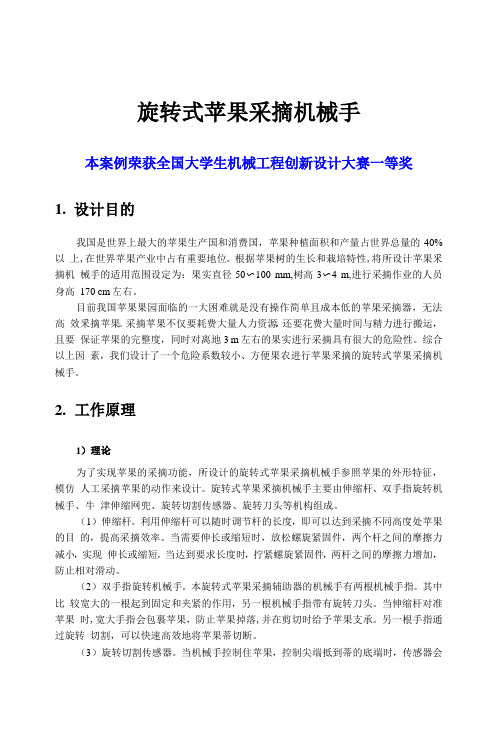
2.工作原理1)理论为了实现苹果的采摘功能,所设计的旋转式苹果采摘机械手参照苹果的外形特征,模仿人工采摘苹果的动作来设计。
旋转式苹果釆摘机械手主要由伸缩杆、双手指旋转机械手、牛津伸缩网兜、旋转切割传感器、旋转刀头等机构组成。
(1)伸缩杆。
利用伸缩杆可以随时调节杆的长度,即可以达到采摘不同高度处苹果的目的,提高采摘效率。
当需要伸长或缩短时,放松螺旋紧固件,两个杆之间的摩擦力减小,实现伸长或缩短。
当达到要求长度时,拧紧螺旋紧固件,两杆之间的摩擦力增加,防止相对滑动。
(2)双手指旋转机械手。
本旋转式苹果采摘辅助器的机械手有两根机械手指。
其中比较宽大的一根起到固定和夹紧的作用,另一根机械手指带有旋转刀头。
当伸缩杆对准苹果时,宽大手指会包裹苹果,防止苹果掉落,并在剪切时给予苹果支承。
另一根手指通过旋转切割,可以快速高效地将苹果蒂切断。
(3)旋转切割传感器。
当机械手控制住苹果,控制尖端抵到蒂的底端时,传感器会向下发出信号,开关处接收到传感器的信号时,提示操作人开始剪切。
这样的控制系统能够保证切到苹果蒂的底端,而且可以减少高度差带来的视觉障碍。
2)验证(1)固定装置。
我们设计的水果采摘器的机械结构比较简单,其主体是俯视时圆心角为60。
菠萝采摘机械手结构设计与试验

一、概述菠萝是一种香甜可口的热带水果,它的采摘一直是一个需要大量人力成本和劳动力的过程。
为了提高采摘效率和降低成本,设计并试验了一种菠萝采摘机械手。
本文将介绍该机械手的结构设计以及试验结果。
二、机械手结构设计1. 机械手结构概述为了满足菠萝采摘的需求,机械手需要具备柔软兼具力度的特点以适应菠萝不同形状的茎和果实,同时还要能够快速且精确地进行抓取和切割操作。
机械手的结构设计需要兼顾这些因素。
2. 机械手结构分析机械手结构主要包括机械手臂、抓取器和切割器。
机械手臂需要具有柔韧性和稳定性,以适应菠萝的不规则形状。
抓取器需要具有足够的力度和灵活性,能够牢固地抓取菠萝,同时也要避免对果实造成损伤。
切割器要能够快速并且精确地进行切割操作,以保证菠萝采摘的效率和质量。
3. 机械手结构设计方案根据上述需求和分析,设计了一种机械手结构方案,采用柔性材料制作机械手臂,并配备有气动抓取器和快速切割器。
机械手臂采用多节段设计,能够在不同位置和角度进行伸缩和旋转,以适应不同形状的菠萝。
抓取器和切割器采用先进的材料和技术,能够在短时间内完成抓取和切割操作。
三、机械手试验1. 试验设计为了验证机械手的设计方案和性能,进行了一系列的试验。
试验主要包括机械手的灵活性和稳定性测试、抓取和切割操作的效率和准确性测试、以及对菠萝的损伤程度测试。
2. 试验结果分析通过试验发现,机械手的结构设计确实能够满足菠萝采摘的需求。
机械手臂的柔性和稳定性能够很好地适应菠萝的形状,抓取器和切割器的性能也能够满足快速和精确的操作。
机械手的操作也很少对菠萝造成损伤。
四、结论通过机械手的结构设计和试验结果分析,证明了该机械手的确能够提高菠萝采摘的效率和降低成本,为菠萝种植业的发展提供了有力支持。
然而,机械手在实际应用中仍存在一些问题,需要进一步的改进和优化。
在未来的研究中,将继续探索机械手在菠萝采摘中的应用,以便更好地服务于农业生产。
五、机械手的优化改进1. 机械手柔性材料的选择在实际应用中,发现机械手臂柔性材料的选择至关重要。
水果采摘机械手的设计
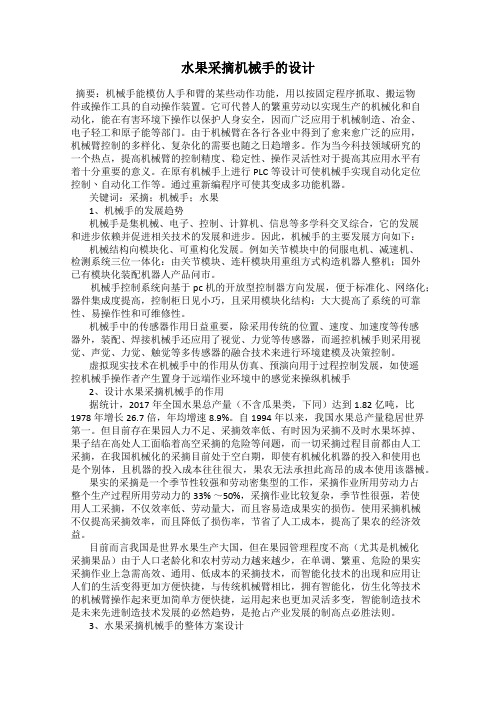
水果采摘机械手的设计摘要:机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子轻工和原子能等部门。
由于机械臂在各行各业中得到了愈来愈广泛的应用,机械臂控制的多样化、复杂化的需要也随之日趋增多。
作为当今科技领域研究的一个热点,提高机械臂的控制精度、稳定性、操作灵活性对于提高其应用水平有着十分重要的意义。
在原有机械手上进行PLC等设计可使机械手实现自动化定位控制丶自动化工作等。
通过重新编程序可使其变成多功能机器。
关键词:采摘;机械手;水果1、机械手的发展趋势机械手是集机械、电子、控制、计算机、信息等多学科交叉综合,它的发展和进步依赖并促进相关技术的发展和进步。
因此,机械手的主要发展方向如下:机械结构向模块化、可重构化发展。
例如关节模块中的伺服电机、减速机、检测系统三位一体化:由关节模块、连杆模块用重组方式构造机器人整机;国外已有模块化装配机器人产品问市。
机械手控制系统向基于pc机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构:大大提高了系统的可靠性、易操作性和可维修性。
机械手中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,装配、焊接机械手还应用了视觉、力觉等传感器,而遥控机械手则采用视觉、声觉、力觉、触觉等多传感器的融合技术来进行环境建模及决策控制。
虚拟现实技术在机械手中的作用从仿真、预演向用于过程控制发展,如使遥控机械手操作者产生置身于远端作业环境中的感觉来操纵机械手2、设计水果采摘机械手的作用据统计,2017年全国水果总产量(不含瓜果类,下同)达到1.82亿吨,比1978年增长26.7倍,年均增速8.9%。
自1994年以来,我国水果总产量稳居世界第一。
但目前存在果园人力不足、采摘效率低、有时因为采摘不及时水果坏掉、果子结在高处人工面临着高空采摘的危险等问题,而一切采摘过程目前都由人工采摘,在我国机械化的采摘目前处于空白期,即使有机械化机器的投入和使用也是个别体,且机器的投入成本往往很大,果农无法承担此高昂的成本使用该器械。
一种水果采摘机械手[实用新型专利]
![一种水果采摘机械手[实用新型专利]](https://img.taocdn.com/s3/m/fe0582987fd5360cbb1adb8b.png)
专利名称:一种水果采摘机械手
专利类型:实用新型专利
发明人:仝美娟,齐占玉,王蒲,樊阿鹏,李辉,贺敏敏申请号:CN201820671914.4
申请日:20180507
公开号:CN208159336U
公开日:
20181130
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种水果采摘机械手,包括剪切机构和收集机构;收集装置包括收集桶和挡板,挡板沿收集桶内壁周向设置,挡板的自由端可绕挡板与收集桶桶壁的连接处转动。
剪切机构包括刀臂和刀片,刀臂为弧形臂,刀臂设置在收集桶上方,刀臂可绕其与收集桶的连接处转动,刀片设置在刀臂上,刀片的形状为与刀臂弧度相同的弧形,刀片可沿刀臂来回滑动。
在弧形刀臂将果实包裹后,刀臂上的刀片向内收缩剪切果实果蒂,挡板打开使果实掉落至收集装置中。
本实用新型的采摘机械手减少了水果采摘过程中的对果实的机械损伤,同时也提高了水果采摘的效率,节省了人工劳力。
申请人:西安建筑科技大学
地址:710055 陕西省西安市雁塔路13号
国籍:CN
代理机构:西安恒泰知识产权代理事务所
代理人:李郑建
更多信息请下载全文后查看。
一种水果采摘机器人末端执行器

一种水果采摘机器人末端执行器一种水果采摘机器人的末端执行器随着科技的不断进步,机器人技术正在越来越广泛地应用于各种领域。
其中,水果采摘领域也不例外。
水果采摘机器人的末端执行器是实现采摘水果的关键部分,它能够通过精确的操作,快速、高效地完成水果采摘任务。
一、末端执行器的设计水果采摘机器人的末端执行器一般采用机械手或机器人手臂的设计。
它通常由多个关节组成,具有高度的灵活性和操作性。
末端执行器可以通过感应器来感知水果的位置和形状,并通过复杂的算法来确定最佳的采摘路径。
二、末端执行器的操作流程1、感应水果:末端执行器使用感应器来探测水果的位置和形状。
这些感应器可以是光学相机、红外相机或深度相机等。
通过对采集到的图像进行处理和分析,可以确定水果的精确位置和大小。
2、路径规划:一旦确定了水果的位置,末端执行器将通过复杂的算法计算出最佳的采摘路径。
这些算法通常考虑多种因素,如机械手的灵活性、水果的位置和形状等。
3、采摘水果:在规划好路径后,末端执行器将开始执行采摘操作。
它可以使用夹持器或剪刀等工具来抓住或切断水果的茎干。
在采摘过程中,末端执行器需要保证水果不受损伤,同时也要保证机械手的操作安全。
4、放置水果:一旦采摘完成,末端执行器将把水果放置到指定的位置。
这个位置可以是篮子、箱子或其他容器。
放置过程中,末端执行器需要保证水果的稳定性和整齐性,以便后续的处理和运输。
三、末端执行器的优势1、高效性:末端执行器可以快速、准确地完成采摘任务,大大提高了采摘效率。
2、准确性:通过感应器和算法的配合,末端执行器可以精确地定位水果的位置和形状,从而保证采摘的准确性。
水果采摘机器人末端执行器的研究进展随着现代农业技术的不断发展,自动化和机器人技术在农业生产中的应用越来越广泛。
其中,水果采摘机器人在提高生产效率、降低劳动成本、提升水果质量等方面具有明显优势。
然而,采摘水果的精度和效率在很大程度上取决于机器人末端执行器的设计和功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种小型高空电动水果采摘机械手装置设计
发表时间:2018-10-17T09:46:53.860Z 来源:《基层建设》2018年第27期作者:祝怀志沈璐鹏叶国江
[导读] 摘要:水果采摘机器人在我国起步晚、发展缓慢,没有系统的方法用以设计采摘机械手,本文根据柑橘生产活动中完成果实采摘整个过程的的具体条件,首先运用所学知识进行机构尺寸的设计;然后创新设计内嵌式关节采摘机械手所有零部件的具体合理尺寸;接着根据机械手的工作方式选择合理的连接方式并通过创建合理约束完成机械手的装配。
衢州职业技术学院浙江衢州 324000
摘要:水果采摘机器人在我国起步晚、发展缓慢,没有系统的方法用以设计采摘机械手,本文根据柑橘生产活动中完成果实采摘整个过程的的具体条件,首先运用所学知识进行机构尺寸的设计;然后创新设计内嵌式关节采摘机械手所有零部件的具体合理尺寸;接着根据机械手的工作方式选择合理的连接方式并通过创建合理约束完成机械手的装配。
关键词:柑橘采摘机械手;内嵌式关节;机械设计
1.引言
近年来,随着全球经济的发展,果蔬供应需求日益增大。
作为一个多类型果蔬生产的大国,果蔬的生产对全国的农业乃至国家的经济发展有着不过或缺的重要作用。
为了适应时代的需求,在国家的鼓励号召下,全国大部分的果蔬生产已经成功进行了转型,由原来的小型散户种植变成了更加科学化,规模化,可控化的果蔬种植园,而全国果蔬的生产总量也得到了量和质的突破。
可是相对经营方式的成功转型,在果蔬生产活动中,几乎占整个生产活动工作量的80%消耗于水果采摘过程,在很大程度的扼制着全国果蔬经济的发展。
大量人力资源的投入不仅生产率没得到保障,就连生产质量也是不尽人意,而且艰苦的工作条件常使采摘人员工作中图中发生意外,导致人员受伤。
为了提高果蔬采摘的效率,解放劳动力,保证水果采摘的质量,设计一款轻巧,灵便,满足工作条件的水果采摘机械手变得迫切且意义重大。
2.机械手设计
机械手是人们为了完成某些特定的生产活动,通过观察人类手臂的移动和手掌的抓举仿生设计出来的可控的机械系统,其一般包括由实现灵活移动的移动机构(手臂)和实现最终生产活动的执行末端(手掌)组成。
机械手的灵活程度在很大程度上取决于机械手的自由度数和控制系统。
自由度越多的机械手一般运动起来更加的灵活,人类的整个手部就是一个具有二十多个自由度的精巧结构。
不过自由度越多,机械手控制起来就会变得越复杂,而人类之所以能够灵活的使用自己的手,是因为有上亿神经系统的精密控制。
所以在设计机械手时,合理的选择机械手的自由度和完善控制系将决定它最终的成败。
2.1柑橘采摘机械手的系统构成
为了实现柑橘果实采摘活动,并在满足工作条件的情况下有尽可能大的工作空间,机械手必须满足俯仰,旋转等运动,所以机械手必须是多自由度的。
图1为其简易结构示意图。
图1结构示意图
在图2-1中,1是控制计算机;2是底座;3是腰部;4是大臂;5是小臂。
在采摘过程中,机械手在伺服电机的带动下,通过腰部的旋转,大小臂的俯仰将机械手的末端定位到所需要采摘的柑橘位置,然后通过末端的执行机构实现果实的采摘。
2.2 柑橘采摘机械手的材料选定
在柑橘采摘的整个生产活动中,由于机械臂并不需要受很大的力,为了更好的适应复杂的果园环境整体机构尽量灵巧轻便,另外考虑到制造的成本问题,综上几点,选择密度相对较低,但强度较高的铝合金为制造机械手的材料。
以下是几种型号铝合金的性能参数表1。
表1 铝合金性能参数表
为了满足机械臂对强度的要求以及尽可能的是机械手轻巧,优先选牌号为6061的铝合金作为机械手的材料。
2.3 基于果园环境的机械手CAD模拟
模拟原则:假设机械手是安装在履带式的行走机构上,在采摘过程中,当行走机构带着机械手靠近果树边沿时,要使机械手能成功采摘到果树上的所有成熟果实,在腰部旋转机构固定时,必须使其工作空间能够覆盖其半剖面,如图2。
2.4 机械手关节处伺服电机
设计一种将伺服电机内嵌于关节内部的机械手,不仅可以大幅减小机械手的体积使机械手整体看起来更加小巧精简,而且可以避免外
悬的伺服电机在机械手采摘过程中与果树枝丫发生不必要的碰撞,即保护了伺服电机,又保证了机械手水果采摘的顺利进行。
综上考虑,本次设计着重点再设计一种结构对称且伺服电机内嵌式的关节在机械手,如图3。
2.5电机的选定
大小臂连接处伺服电机2的选择:在机械手进行柑橘采摘过程中,为了使小臂能实现自由俯仰,电机2必须克服小臂本身以及执行末端对该关节处的转矩进行做功。
经计算,为了满足连接点所需的转矩以及实现机械手内嵌式关节的设计构思,需要选择一款转矩大于或等于5.45 且外形较规则,尺寸较小的伺服电机。
不过传统的伺服电机普遍转矩都较小,一般都需要配合一定的减速增力装置才能达到力矩要求,而且考虑到传统伺服电机的外形尺寸都比较大且不规则,又比较笨重等,所以传统的伺服电机显然不是用于内嵌式关节水果采摘驱动的最佳选择。
而相对传统的伺服电机,完美的将伺服电机和减速器结合到一起的舵机不仅转矩相对较大,而且体积,质量远小于传统的伺服电机,是内嵌式关节机械手的最佳选择。
再加上考虑到机械手机构的对称性设计,最终选择舵机2的具体参数具体如图4:
图4 舵机2
大臂底座连接处电机1的选择:相对于电机2只需要克服小臂及执行末端在关节2处的力矩外,位电机1不仅需要克服大臂在关节1处的力矩,而且还要克服连接大臂的小臂以及执行末端对关节1的力矩。
具体尺寸图如5:
图5 舵机1
旋转底部电机3的选择:由于电机3的主要作用是为了扩大机械手的工作空间,安装在机械手底部带动机械手旋转,使工作空间其由二维的区域面扩大为三维的立体空间。
所以在运行过程中,除了克服底部旋转机构零件之间的摩擦和外部环境对机械手的一些不定性阻力外,电机3并不需要受太大的力,所以电机对于力矩并没有太大的要求。
而且由于电机3不像关节处电机需要考虑机构的对称性,所以不需要虚轴。
综上选择电机3的具体参数如图6:
图6 舵机3
2.6机械臂尺寸的设计
根据机械手的结构简图,设计优化机械手的大臂,小臂,底座等各个零件的尺寸参数,然后绘出零件图7。
3.结束语
本次设计以设计果园种植柑橘所需的采摘机械手为目的,经过了解一般机械手系统的组成,机械手驱动的合理选择,以及对市面上一些常见机械手外形结构的比对。
然后根据现实中柑橘树的冠,茎等树体特征,先对机械手大小臂的长度尺寸进行了确定。
再以实现机械手驱动伺服电机的内嵌式设计,根据所选驱动舵机的外形尺寸,着重对机械手的各个关节,底部旋转结构处做了具体的结构设计。
参考文献
[1]林金龙, 范青, 欧阳静怡,等. 便携式电动水果采摘装置:, CN105850364A[P]. 2016.
[2]杨涛清, 邓学雄. 小型高空电动采果器设计[J]. 包装工程, 2016(2):125-129.
[3]汤兴初, 吴明亮, 全腊珍,等. 可伸缩式高枝采果器的设计[J]. 农机化研究, 2004(2):161-162.
[4]詹超, 曹成茂, 娄帅帅,等. 高空便携式山核桃拍打采摘机设计[J]. 农机化研究, 2017, 39(10):119-123. 基金资助:浙江省大学生科技创新活动计划暨新苗人才计划(2018R475001).。