一种非径向三梁结构六维腕力传感器弹性体及其优化设计
《刚柔混合结构三腿六维力传感器关键技术研究》范文
《刚柔混合结构三腿六维力传感器关键技术研究》篇一一、引言随着现代工业技术的快速发展,对于高精度、高稳定性的力传感器需求日益增长。
刚柔混合结构三腿六维力传感器作为一种新型的传感器技术,具有高灵敏度、高可靠性以及良好的动态响应特性,被广泛应用于机器人、自动化设备、航空航天等领域。
本文将重点研究刚柔混合结构三腿六维力传感器的关键技术,探讨其工作原理、设计方法以及实际应用。
二、刚柔混合结构三腿六维力传感器的工作原理刚柔混合结构三腿六维力传感器主要由弹性体、传感元件及信号处理电路等部分组成。
其工作原理是通过将外部作用力转化为传感元件的电信号输出,从而实现对力的测量。
该传感器具有三个支撑腿,能够在三个方向上同时测量力和扭矩,具有六维力测量能力。
三、关键技术研究1. 弹性体设计弹性体是刚柔混合结构三腿六维力传感器的核心部件,其设计直接影响到传感器的性能。
在弹性体设计过程中,需要考虑到材料的刚性和柔性、结构的稳定性和可靠性等因素。
通过优化设计,使得弹性体在受到外部作用力时,能够产生准确的形变,从而将力信号转化为电信号输出。
2. 传感元件选择与配置传感元件是刚柔混合结构三腿六维力传感器的关键部件,其性能直接影响到传感器的测量精度和稳定性。
在选择传感元件时,需要考虑到其灵敏度、线性范围、响应速度等因素。
同时,还需要根据传感器的具体应用场景,合理配置传感元件的数量和位置,以保证传感器在各个方向上的测量精度和稳定性。
3. 信号处理电路设计信号处理电路是刚柔混合结构三腿六维力传感器的重要组成部分,其主要功能是对传感元件输出的电信号进行放大、滤波、转换等处理,以得到可用的力测量数据。
在信号处理电路设计过程中,需要考虑到电路的抗干扰能力、稳定性、响应速度等因素,以保证传感器在复杂环境下的可靠性和稳定性。
四、实际应用刚柔混合结构三腿六维力传感器具有广泛的应用前景,可以应用于机器人、自动化设备、航空航天等领域。
在机器人领域,该传感器可以用于机器人末端执行器的力控制,实现精确的抓取和操作;在自动化设备领域,该传感器可以用于对生产线上的工件进行精确的定位和装配;在航空航天领域,该传感器可以用于飞机和卫星的姿态控制和稳定性的监测。
超薄六维力力矩传感器优化设计及其解耦

超薄六维力/力矩传感器优化设计及其解耦作者:梁桥康王耀南来源:《湖南大学学报·自然科学版》2012年第04期摘要:在智能机器人和工业自动化等应用场合中,力/力矩传感器的高度尺寸过大会对基座和驱动部件引起与之成正比的附加力矩,因此不仅要求传感器精度高、耦合低,同时也应要求其高度尺寸小.结合有限元分析法、SDO方法和神经网络方法,设计一种新型的基于应变检测原理的超薄六维力/力矩传感器,并对传感器进行非线性维间解耦和标定.实验结果表明,传感器精度性能优良,其设计和优化过程正确合理,具有较广的应用前景.关键词:优化设计;六维力/力矩传感器;非线性解耦;神经网络中图分类号:TP212.12 文献标识码:AOptimal Design of a Thin Six-dimensional F/T Sensor and its Nonlinear DecouplingLIANG Qiao kang1,WANGYao nan1,GE Yun jian2, GE Yu2(1. College of Electrical and Information Engineering, Hunan Univ, Changsha, Hunan 410082, China;2. Institute of Intelligent Machines, Chinese Academy of Sciences, Hefei, Anhui 230031, China)Abstract:The height dimension of the F/T sensors always causes additional moment to the bases and actuators of intelligent robots and industrial manipulators. Therefore, an excellent F/T sensor should be high performing, weak decoupling and thin. Aiming at providing high performance six dimensional force/torque information for intelligent robots and industrial systems, a new thin six D F/T sensor with its height dimension below 15 mm is designed based on strain measurement.The SDO of the elastic body is performed. The nonlinear decoupling and calibration of the sensor based on Artificial Neural Network is used to eliminate the coupling among components. The results of the calibration experiment have shown that this sensor possesses high performances, the design and optimization are rational, and its maximum nonlinearity error and the maximum coupling error are 0.15%F.S. and 1.6%F.S., respectively.Key words:optimal design; six dimensional force/torque sensor; nonlinear decoupling; artificial neural network多维力/力矩信息感知是智能机器人和工业自动化等应用场合最重要的感知之一.因能同时获取三维空间直角坐标系下的两个或者两个以上方向的力和力矩信息,已被广泛应用于各种场合为机器人和自动化系统的反馈控制提供实时力/力矩信息,如轮廓跟踪、零力示教、柔性自动装配、机器人远程操作、机器人多手协作、机器人外科手术和康复训练等.目前,机器人多维力/力矩传感器生产产家主要有美国的AMTI,ATI,JR3,Lord等,瑞士的Kriste,德国的Schunk,HBM等公司.东京工业大学机械工程与科学系设计了一种基于光学检测的六维力/力矩传感器[1].瑞士苏黎世联邦高等工学院研制了第一台成功应用的基于MEMS的电容式六维力/力矩传感器[2].美国代顿大学研制了一种基于磁致伸缩原理的力传感器[3].印度科学研究院设计了一种高灵敏度基于近奇异构型的Stewart平台的六维力/力矩传感器[4].由于应变检测方法的原理和方法都比较成熟,因此大多数的多维力/力矩传感器都采用了这个方法,其敏感元件——弹性体有三垂直筋结构、双环形结构、盒式结构、圆柱形结构、双头形结构、三梁结构和八垂直筋结构等[5-9].目前,虽然各种力传感器功能齐全、种类繁多,但是传感器高度尺寸都比较大,一般为40~80 mm之间,大大制约了传感器在各个领域的应用.此外,大部分的多维力/力矩传感器都是一体化设计,这就势必引起传感器在各维之间存在一定的互相干扰——维间耦合,传统的多维力/力矩传感器的线性解耦方式已不能满足越来越多的应用环境对精度的要求.本文提出了一种新型的超薄六维力/力矩传感器,其高度尺寸可以在15 mm以内,配合多目标优化设计方法和非线性神经网络解耦方法,研制的传感器具有高灵敏度、高精度和各向同性等特点.1 传感器设计如图1所示,设计的传感器由上盖板,弹性体,下盖板组成.其中,上下盖板安装在传感器的顶部和底部,作为转接板与应用环境相连;弹性体将传感器受到的力信息转换为电信号输出;装配完成后,在弹性体与下盖板之间预留有一个空腔,用于安放传感器的信号处理电路.其中上下盖板选用不锈钢材料1Cr13;弹性体选用硬铝材料LY12.根据一般场合对传感器的要求,拟定三维力量程为300 N,三维力图1 传感器爆炸示意图Fig.1 An exploded view of the designed sensor湖南大学学报(自然科学版)2012年第4期梁桥康等:超薄六维力/力矩传感器优化设计及其解耦矩量程为10 Nm.传感器的高度尺寸是影响传感器应用的一个重要因素,当机械手实际操作时,作为腕力传感器的高度几何尺寸越大,机械手后续部件所受到的力矩因为力臂的增大而成比例的增大,这将影响机械手所需的额定功率及其最大工作空间.因此,传感器弹性体在设计时,除了考虑其耦合、结构复杂度、刚度、灵敏度、线性度等性能指标外,还应该考虑传感器的高度尺寸.设计的传感器弹性体如图2所示,弹性体底座与传感器的下盖板通过8个螺栓相连为传感器提供刚性支撑作用;中空支柱连接上、下E型膜;上部的传力环与传感器的上转接板通过8个螺栓连接;4片薄矩形片连接上E型膜与传力环.下E型膜用来检测法向力F z和切向力F x,F y;上E型膜用来检测绕切向方向的力矩M x与M y;4片薄矩形片用于检测绕法向的力矩M z.由于上、下E型膜的合理布置,传感器的弹性体高度几何尺寸仅为10 mm.图2 传感器弹性体结构Fig.2 A partially cutaway perspectiveview of the elastic element使用有限元分析软件ANSYS的SDO (Simulation driven Development and Optimization) 方法,将传感器弹性体重要几何尺寸E型膜厚度h,E型膜内径d1,E型膜外径d2,薄矩形片厚度d3设为设计变量.综合考虑传感器的结构和尺寸,将各变量的初始条件限定为:0.45 mm≤h ≤ 1.5 mm,2 mm≤ d 1 ≤ 4.5 mm,6 mm≤d 2 ≤10 mm,0.5 mm≤ d3≤ 2 mm.弹性体上发生的应变直接决定着传感器的灵敏度.为了保证传感器有高的灵敏度,一般采用弹性体上应变最大和最小的位置来粘贴应变片.只有弹性体工作在其材料的比例极限内,才能保证弹性体上的应变和应力有比例关系.因此还确定弹性体上发生的最大应变e max,最小应变e min和最大变形d max作为优化设计的设计目标分别为:e max≤1 000 με,e min≥ -500με,d max≤ 0.05 mm e max和e min确保弹性体工作在材料的比例极限范围内,同时确保弹性体有足够的应变即传感器有一定的灵敏度,d max可以保证传感器有良好的线性度和可靠性.用ANSYS软件中的DesignModeler 对弹性体进行参数化建模,并对模型进行划分网格、指定边界条件和负荷情况等处理,软件根据Screening法则确定各设计变量的选择,确定了样本点.程序自动将各样本点按一定方法进行组合,并计算出每种组合相应输出变量的值,最后,根据预先设定好的设计目标,软件自动选择了3组最优解,如表1所示.从优化过程可知,相对另外3个设计变量,E型膜的厚度尺寸为传感器最灵敏尺寸.表1 优化设计结果Tab.1 Optimal design results组序h/mmd1/mmd2/mmd3/mmSymboleA@maxSymboleA@mind max/mm10.97583.49518.13251.12856.3e 4-6.31e 40.001920.98013.51557.96571.16386.4e 4-6.35e 40.001930.97953.65218.23471.25636.2e 4-6.29e 40.00212 应变片布片及组桥本设计采用半导体应变片作为检测元件,全桥检测电路作为测量电路.根据ANSYS软件对弹性体静力学的分析结果,弹性体上选择在最大和最小应变发生的位置放置应变片,每一维使用4个应变片构成全桥检测电路,最后将六路检测电路的输出通过弹性体中间的小孔引到底座的空腔中的数据采集处理电路.其应变片位置和组桥方式如图3所示,其中R i为第i个应变片,△U j为第j维的电桥输出电压.(a)应变片在弹性体上的布置示意图(b)变片组桥方式图3 应变片布片和组桥方式Fig. 3 Strain gauges arrangement传感器的各维输出为:ΔU F xΔU F yΔU F zΔU M xΔU M yΔU M z=1/4UK(ε13-ε14-ε15+ε16)1/4UK(ε17-ε18-ε19+ε20)1/4UK(ε21-ε22-ε23+ε24)1/4UK(ε5-ε6-ε7+ε8)1/4UK(ε9-ε10-ε11+ε12)1/4UK(ε1-ε2-ε3+ε4).(1)式中,εi为第i片应变片的应变值,U为桥路的激励电压,K为应变片的灵敏系数.传感器输出的力/力矩信息一般为传感器本地坐标系下表示的信息,为了便于控制系统使用,把所获得的力/力矩信息转换成机器人手爪坐标系如下:F c M c=R c s0S(r c cs)R c sR c sF s M s.(9)其中:F c为在手爪坐标系下的三维力;M c为在手爪坐标系下的三维力矩;R c s 为方向转变矩阵;r c cs为在手爪坐标中表示的,起点在传感器坐标系原点,终点在手爪坐标系原点的矢量.F s为在传感器坐标系下的三维力;M s为在传感器坐标系下的三维力矩信息;S为斜对称算子.3 传感器非线性解耦维间耦合极大地限制了多维力/力矩传感器精度的提高,因此有效地解耦方法是高精度多维力/力矩传感器的一个重要手段[11].非线性模型真实地反映了多维力/力矩传感器的实际情况,从理论上说可以彻底解决静态解耦问题[12].采用隐层为单层神经元的三层BP神经网络模型,神经元的个数通过实验得到.如图4所示,将6维力/力矩传感器六个桥路的输出电压组成的列向量U=U xU yU zU Mx U My U Mz T作为神经网络的输入向量,将对应的作用在传感器坐标系原点上的六维力/力矩等效信息所组成的列向量F=F xF yF zM xM yM z T作为神经网络的输出向量.对传感器进行加载,记录每次加载时的各路输出电压,每次加载的输出电压和相应的加载力作为一个样本点,用基于MATLAB的BP神经网络训练程序对神经网络模型进行训练,以获得合适的网络权值和阈值,使神经网络输出与样本输出的均方误差满足给定的条件,得到传感器的神经网络模型参数.图4 六维力/力矩传感器神经网络解耦模型Fig.4 Neural network model forcalibration and decoupling在解耦模型的训练过程中,采用5~20个神经元数分别对网络进行训练,从得到的训练曲线中可知,当隐层的单元数为7时,不论从误差、收敛速度和网络复杂程度等分析,都比较合适,其训练误差曲线如图5所示.从图中可知在训练步数为360步时,均方误差小于0.01,已达到了精度要求.训练次数图5 神经网络训练误差曲线Fig.5 Error curve of the neural network training4 传感器精度性能分析通过上述的解耦方法,并经过一定的信号处理,我们最终获得了超薄六维力/力矩传感器的输入和输出曲线如图6所示.图中横坐标表示加载的标准法码重量,纵坐标表示A/D采集模块的输出数字量.(a)F x维的标定曲线(F y维与之相同)(b)F z维的标定曲线(c) M x维的标定曲线(M y与之相同)(d)M z维的标定曲线图6 六维力/力矩传感器的标定实验结果Fig. 6 Calibration text results由图6实验结果可知,设计的超薄六维力/力矩传感器线性度好,并且关于零点对称,各向同性,最大线性度误差为0.15%F.S.,最大耦合误差为 1.6%F.S.传感器实物图见图7.图7 传感器实物图Fig.7 The fabricated six dimensional force/torque sensor5 结论本文探讨了一种基于应变检测技术的超薄六维力/力矩传感器,对传感器力敏元件进行了多目标优化,根据其力学特性确定了弹性体进行了布片、组桥方式,结合基于神经网络的非线性标定及解耦,使设计的传感器具有灵敏度高、线性度好、维间耦合小等特点.值得注意的是,用神经网络进行传感器标定,传感器的精度很大程序上受制于训练样本的范围,若传感器所受力超出其量程(训练样本通常在量程范围内),神经网络的外延问题极易导致精度衰减,如何解决这类问题有待下一步深入研究.参考文献[1] HIROSE S,YONEDAK.Development of optical six axial force sensor and its signal calibration considering nonlinear interference[C]//Proceedings of IEEE International Conference on Robotics and Automation,1990,5: 46-53.[2] BEYELER F,MUNTWYLERS,NELSON B J. A six axis MEMS force torque sensor with micro newton and nano newtonmeter resolution [J]. Journal of Microelectromechanical Systems, 2009, 18 (2):433-441.[3] BAUDENDISTEL T A. Development of a novel magnetostrictive force sensor [D]. University of Dayton, 2005.[4] RANGANATH R,NAIRPS,MRUTHYUNJAYATS. A force torque sensor based on a stewart Platform in a near singular configuration [J]. Mechanism and Machine Theory,2004, 39(9): 971-998.[5]葛运建,戈瑜,吴仲城,等.浅析我国传感器技术发展中的若干问题[J].世界产品与技术,2003,5:22-36.GE Yin jing. GEYu,WUZong cheng,et al. Analysis of Several problems about sensors technology development in China [J]. Electronic Component News, 2003, 5:22-36.(In Chinese)[6] LIANG Q,ZHANGD. A potential 4 D fingertip force sensor for an underwater robot manipulator [J]. IEEE Journal of Oceanic Engineering, 2010, 35(3):574-583.[7]孟庆鑫,王华,王立权,等.一种水下灵巧手指端力传感器的研究[J].中国机械工程,2006,17(11):1132-1135.MENG Qing xin, WANG Hua, WANG Li quan,et al. Development of fingertip force sensor for a dexterous underwater hand [J]. China Mechanical Engineering, 2006, 17(11):1132-1135.(In Chinese)[8]秦岗,曹效英,宋爱国,等.新型四维腕力传感器弹性体的有限元分析[J].传感技术学报,2003,16(3):238-241.QIN Gang, CAO Xiao ying, SONG Ai guo,et al. Finite element analysis for elastic body of new 4axis wrist force sensor [J]. Chinese Journal of Sensors and actuators, 2003, 3:238-241.(In Chinese)[9]邱联奎,雷建和,宋全军,等.水下机器人手爪力感知系统研究[J].传感技术学报,2006,19(4):1152-1156.QIU Lian kui, LEI Jian he, SONG Quan jun,et al.Research on force sensing system for an underwater gripper [J]. Chinese Journal of Sensors and Actuators, 2006, 19(4):1152-1156.(In Chinese)[10]刘开宇,王成亮.非线性二元离散神经网络模型的渐近性[J].湖南大学学报:自然科学版,2010,37(3):53-56.龙源期刊网 LIU Kai yu,WANG Cheng liang. Asymptotic behaviors for a class of nonlineardiscrete time neural networks with two neurons [J]. Journal of Hunan University:Natural Sciences),2010,37(3):53-56.(In Chinese)[11] LIANG Q, ZHANG D,GE Y. A novel miniature four dimensional force/torque sensor with overload protection mechanism [J]. IEEE Sensors Journal,2009,9(12):1741-1747.[12] CAO H,YUY,GEY. A research of multi axis force sensor static decoupling method based on neural network [C]//Proceeding of the IEEE International Conference on Automation and Logistics,2009:875-879.。
一种六维腕力传感器动态响应的研究
r方 向 一根 弹 簧 刚 度 ;
—
—
~
方 向一 根 弹 簧 刚 度 ;
,
分 别考 虑 系统受到 徽 位 移 d d , 和 微 角位 移 … d
,
k— — z方 向 一艰 弹 簧 刚 度 ; =
— —
作 用 的动能 、 势能 和 阻尼力 。
m 2 , () 1
行 为进行 了一 定的研 究工 作 , 在结构 简化 、 型建立 但 模 等 方面 , 仍然有 值得商榷 的地方 l 。 3 一
—
—
m— — 传 感 器 中 心 台 质 量 ( g ; k ) 卜一 传感 器 十 字 梁 长 ( ; m) 』—— 传 感 器 中心 台 对 Y轴 的 转 动 随量
2 0 5 302
( 中 N 科学 技 术大 学 经 济 拄 术学 院 . 徽 旨 肥 2  ̄5 ; 2 合肥工业大学, 1 安 3 2 . 安徽 合肥
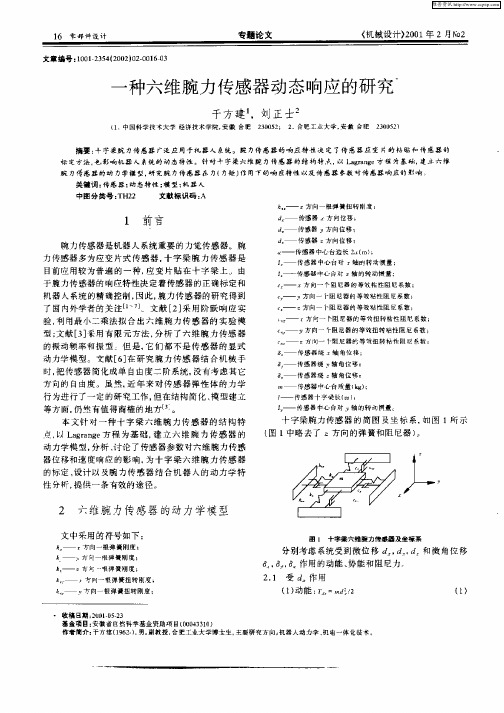
摘 要 : 字粱 腕 力传 感器 厂泛 应 用于 机 器 人 系统 。腕 力传 惑 器 的 响 应 特 性 决 定 了传 感 嚣 应 变 片 的拈 贴 和 传 感 器 的 十 标 定方 法 . 影响 机 器 人 系统 的动 态 特 性 。 针 对 十 字 梁 六 维 腕 力 传 感 器 的结 构 特 点 . I gag 也 以  ̄ r e方 程 为 基 础 . 立 六 维 n 建
动 力学模 型。文 献 [ ] 研 究 腕 力 传感 器 结 合 机 械手 6在
传感 器 中心 台边 长 2 m) Ⅱ( ;
』—— 传 感 器 中 心 台对 轴 的 转 动 惯 量 』— — 传 感 器 中心 台 对 轴 的 转 动 惯 量 f—— 方 向一 十阻 尼 器 的 等 效 粘 性 阻 尼 系数 ;
一种六维力传感器[发明专利]
![一种六维力传感器[发明专利]](https://img.taocdn.com/s3/m/5ed80f92a417866fb94a8ed8.png)
专利名称:一种六维力传感器
专利类型:发明专利
发明人:冯华山,王润孝,高军,谭小群,刘桉,范阳曦,刘超,刘云飞
申请号:CN200910024143.5
申请日:20090929
公开号:CN101672705A
公开日:
20100317
专利内容由知识产权出版社提供
摘要:一种六维力传感器,包括由圆筒形壳体和十字弹性梁构成的传感器弹性体与电阻应变片。
十字弹性梁位于壳体内中心,由应变梁(1)和加载台(3)构成。
上基座(6)和下基座(10)分别位于壳体两端;传力柱(7)位于壳体中间,并与上弹性梁(4)和下弹性梁(8)相连;柔性梁(2)位于传力柱之间,其内侧与应变梁连接。
传感器力敏元件为上弹性梁、下弹性梁和应变梁,在力敏元件上适当位置贴装(28)片电阻应变片,其中24片应变片组成6组全桥检测电路,实现六维力信息的获取,其余4片应变片备用。
本发明具有结构紧凑、刚度大、维间耦合小、精度高、动态性能好的特点,能够用于智能机器人研究、自动化检测和控制、仿生运动分析和体育运动研究。
申请人:西北工业大学
地址:710072 陕西省西安市友谊西路127号
国籍:CN
代理机构:西北工业大学专利中心
代理人:慕安荣
更多信息请下载全文后查看。
多维力传感器国内外研究现状
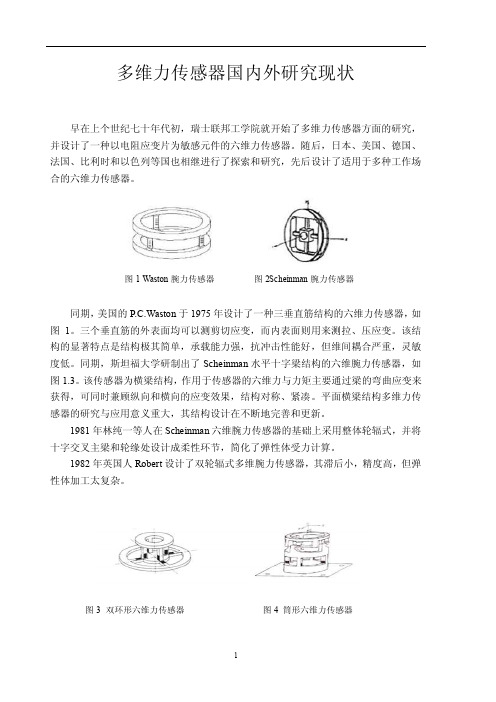
多维力传感器国内外研究现状早在上个世纪七十年代初,瑞士联邦工学院就开始了多维力传感器方面的研究,并设计了一种以电阻应变片为敏感元件的六维力传感器。
随后,日本、美国、德国、法国、比利时和以色列等国也相继进行了探索和研究,先后设计了适用于多种工作场合的六维力传感器。
图1 Waston腕力传感器图2Scheinman腕力传感器同期,美国的P.C.Waston于1975年设计了一种三垂直筋结构的六维力传感器,如图1。
三个垂直筋的外表面均可以测剪切应变,而内表面则用来测拉、压应变。
该结构的显著特点是结构极其简单,承载能力强,抗冲击性能好,但维间耦合严重,灵敏度低。
同期,斯坦福大学研制出了Scheinman水平十字梁结构的六维腕力传感器,如图1.3。
该传感器为横梁结构,作用于传感器的六维力与力矩主要通过梁的弯曲应变来获得,可同时兼顾纵向和横向的应变效果,结构对称、紧凑。
平面横梁结构多维力传感器的研究与应用意义重大,其结构设计在不断地完善和更新。
1981年林纯一等人在Scheinman六维腕力传感器的基础上采用整体轮辐式,并将十字交叉主梁和轮缘处设计成柔性环节,简化了弹性体受力计算。
1982年英国人Robert设计了双轮辐式多维腕力传感器,其滞后小,精度高,但弹性体加工太复杂。
图3 双环形六维力传感器图4 筒形六维力传感器1982年德国人Schott提出了双环形六维力传感器,如图3所示。
该传感器具有维间耦合小的特点,但其刚度与灵敏度的矛盾较大,难以协调。
1983年JR公司研制出了IR3多维腕力传感器,该传感器采用金属箔纸电阻应变片式的水平四梁结构。
CCC(California Cybernetics Corporation)公司也生产敏感元件为光纤轮辐式的十字梁多维腕力传感器。
Femandez研制出敏感元件为光栅的类似结构的多维腕力传感器。
1983年美国Stanford研究所设计了筒形的六维力传感器用于风洞测力实验,如图1.5所示。
一种新型结构的机器人六维力传感器

一种新型结构的机器人六维力传感器
胡建元;黄心汉
【期刊名称】《传感器技术》
【年(卷),期】1991(000)004
【摘要】本文介绍了自行设计研制的机器人六维腕力传感器(HUST-FS6)。
这种力传感器弹性体结构为三梁非径向对称结构,经过测试,各项性能良好,将HUST-FS6力传感器装于机器人腕部,成功地进行了跟踪外部环境的运动实验。
【总页数】4页(P13-16)
【作者】胡建元;黄心汉
【作者单位】不详;不详
【正文语种】中文
【中图分类】TP242
【相关文献】
1.一种新型工业机器人六维力传感器设计研究 [J], 赵克转;徐泽宇
2.基于六维力传感器的机器人末端执行器碰撞位置检测方法 [J], 李倩倩;袁宏祥;马昕;宋锐
3.一种新型结构机器人的四维指力传感器设计 [J], 梁桥康;宋全军;葛运建
4.一种六维力传感器及改善六维力传感器温度漂移的方法 [J],
5.机器人基座六维力传感器重力补偿研究 [J], 黄树新;高海涛;朱松青;韩亚丽;江王磊
因版权原因,仅展示原文概要,查看原文内容请购买。
复合梁结构小型六维力传感器的优化设计
复合梁结构小型六维力传感器的优化设计孙逸文;陈希良;谢正宇【期刊名称】《仪表技术与传感器》【年(卷),期】2024()3【摘要】文中设计了一种三横梁与三竖梁复合的六维力传感器弹性体结构,使其外径缩小至40 mm,整个传感器装配完成后外径为45 mm。
首先基于有限元技术分析了其在各种载荷条件下的应变分布,根据应变分布特性,设计了传感器的惠斯登电桥方案,推导了每个方向的输出电压公式。
在此基础上,基于Box-Behnken响应面法开展弹性体结构的优化,以弹性体上应变片贴片位置的平均应变作为优化目标,通过多目标遗传算法得到最优设计参数,F_(x)、F_(y)、F_(z)、M_(x)、M_(y)、M_(z) 6个方向的平均应变分别是优化前的1.5833、1.5632、1.7338、1.5113、1.5109、2.171倍。
进行样机制作,完成标定实验,使用最小二乘法求得解耦矩阵,通过解耦矩阵求得传感器的Ι类误差分别为0.18%、0.42%、0.41%、0.05%、0.49%、0.6%,ΙΙ类误差最大值为1.665%,精度高,维间耦合小,验证了该结构的可行性。
【总页数】8页(P21-28)【作者】孙逸文;陈希良;谢正宇【作者单位】浙江理工大学机械工程学院;台州学院智能制造学院【正文语种】中文【中图分类】TP212【相关文献】1.SiO2-Si3 N4-SiO2复合梁谐振式压力传感器结构设计与分析2.原子力显微镜悬臂梁力传感器的设计与优化3.阶梯结构微梁传感器优化设计4.一种十字梁结构多维力传感器结构优化5.一种三梁结构六维力传感器设计与研究因版权原因,仅展示原文概要,查看原文内容请购买。
一种机器人六维腕力传感器的标定方法
一种机器人六维腕力传感器的标定方法郑朝阳;翟其建;赵金鹏【摘要】该文结合所用六维腕力传感器的结构形式提出了其标定的方法,分析了传感器耦合的原因,对解耦的方法进行了研究,用试验方法对传感器进行了标定,得出了标定矩阵C,运用Matlab软件对各单维力/力矩的试验结果进行了线性拟合,结果显示线性化较好,弹性体结构设计合理,试验验证后结果显示标定矩阵C误差较小,符合机器人使用要求.最后分析了标定中误差产生的原因,提出了减少误差的措施,具有重要的工程实践意义.%Combined with the structure of the six dimensional wrist force sensor,the calibration method was put forward,the reason of the sensor coupling was analyzed,the decoupling method was studied,the sensor was calibrated using test method,the calibration matrix C was obtained,the test results of each couple/torque were fitted by Matlab software,the results show that the linearization is good,the elastomer structure design is reasonable,the results show that the error of the calibration matrix C is small,which meets the requirements of the robot.Finally,the causes of the errors in calibration are analyzed,and the measures to reduce the errors are proposed,which have important engineering practical significance.【期刊名称】《自动化与仪表》【年(卷),期】2018(033)001【总页数】6页(P41-45,50)【关键词】机器人;六维力;传感器;标定方法;误差分析【作者】郑朝阳;翟其建;赵金鹏【作者单位】中国船舶重工集团公司第七一六研究所,连云港222006;中国船舶重工集团公司第七一六研究所,连云港222006;中国船舶重工集团公司第七一六研究所,连云港222006【正文语种】中文【中图分类】TH16对于机器人腕力传感器来说,由于结构复杂、加工误差以及弹性体结构质地的不均匀性等各方面因素的影响,使得传感器各输出通道之间存在相互耦合,这种耦合的关系很复杂,难以从理论上进行精确的描述[1],需要采用试验的方法来进行标定。
新型六维腕力传感器
1 东南大学 仪器科学与工程学院, 南京,106 209
曲未 僵垂
学 学 自 科学 2 1 () 04 报: 然 版,1,5:20 0 3 4 -7
Ju a f nigU i rt fno m tnS ineadT cn l y: trl cec dt n,0 13 5 :0 -0 o rl o j nv syo fr ai c c n ehoo Naua ineE io 2 1 ,( )4 24 7 n Na n ei I o e g S i
六维 腕力 传感 器 的 弹性 体 的结 构 设 计 是 影 响传 感 器 性 能 的关 键 性技术 . 本文 所设 计 的六 维腕 力 传 感 器 的 敏 感 元 件 采 用 的是 整 体 轮辐 式 十字梁 结 构 的弹性 体 , 其机 械结 构 如图 2所示 . 十字 交叉 梁分 为 4个 正方 棱柱 形 主梁 , 每个 主 梁和 轮缘 的联 结处
体 中心孔 过盈 配合 的标定 轴传 递 给 弹性 梁 , 现力/ 实 力 矩 信息 的测 量.
2 有 限元 分 析
因为多维 腕 力传 感 器 中弹性 体 的结构 设 计 和应 变片 贴 片是关 系 到 整 个 传 感 器 性 能 的关 键 技 术 , 因 此要 对 弹性体 进 行 力 学 分 析 , 定 其 结 构 尺 寸 以及 确
收 稿 日期 2 1 -82 0 10 -5
资助项 目 中国空 间技术研 究 院( A T 科研 C S)
基 金 (0 9 1 ) 2 0 —2 作者 简 介 茅 晨 , , 士 生 , 要研 究 方 向 为 多 维 力 女 硕 主
图 1 总体 结 构
Fi 1 Ov r l sr c u e o a i itfr e s ns r g. e al tu t r f6- xs wrs o c e o
Stewart六维力传感器优化设计
0 引 言
杆件 只承受沿 轴线 方 向的拉 力/ 压力( 在 不考 虑重 力和 各 球面副摩 擦力 矩 的情 况下 ) , 从而 可通过 检测 6个 弹性 杆 件的变形 实现对空间载荷测量。传感 器上下平 台的几何 中
( 陕 西 电器 研 究 所 , 陕西 西安 7 1 0 0 7 5 )
摘
要 :对 S t e w a t六维力传感器进行 了优化设计分析 , r 在有限元分析的基础上 , 通 过球头球 窝结构 、 十字
槽结 构以及圆环内嵌十字梁结构 等形 式 , 增强 了传感器整体 的抗耦能力 。同时 , 对优化前 后的传感 器进行
s t uc r t u r e . a n t i c o u p l i n g a b i l i t y o f s e n s o r i s s t r e n g t h e n e d . At t h e s a me t i me, e x p e r i me n t a l c o mp a r i s o n i s c a r r i e d o u t o n o p t i mi z e d a n d n o n — o p t i mi z e d s e n s o r . T h e s e n s o r ma x i mu m e r r o r i S r e d u c e d f r o m 3 . 2 8% t o 0 . 4 1% wi t h o n e