单级倒立摆模糊控制研究_黄彦海
毕业设计毕业论文一阶倒立摆模糊控制系统[管理资料]
![毕业设计毕业论文一阶倒立摆模糊控制系统[管理资料]](https://img.taocdn.com/s3/m/cd451f987e21af45b307a8f7.png)
摘要一阶直线倒立摆是一个典型的“快速、多变量、非线性、自不稳定系统”,对一阶倒立摆系统的稳定性研究在理论上和方法上具有深远的意义。
对一阶倒立摆的研究可以归结为对非线性、多变量、不稳定系统的研究。
在应用上,一阶倒立摆广泛应用于控制理论研究、航空航天控制等领域,在自动化领域中具有重要的价值。
本文首先是建立一阶倒立摆的数学模型,并且采用的是双闭环控制系统,通过对一阶倒立摆的双闭环控制系统数学模型的分析,将模糊控制方法应用于一阶倒立摆的控制问题,其中,内环控制倒立摆的摆角,外环控制倒立摆的位置。
采用模糊控制器的设计包括隶属函数及模糊控制规则、解模糊,最后利用MATLAB软件进行仿真实验。
模糊控制方法应用于一阶倒立摆系统的控制中,能够发挥模糊控制在非线性系统的控制、复杂对象系统控制方面的优势,简化设计,提高系统的鲁棒性。
关键词:一阶倒立摆,数学模型,模糊控制,MATLABAbstractThe first-order linear inverted pendulum is a typical “fast, multivariable, nonlinear, unstable system”, for an inverted pendulum system stability research in theory and method has the profound significance. For an inverted pendulum can boil down to the research on nonlinear, multivariable, unstable system research. In application, an inverted pendulum is widely used in control theory, aerospace control and other fields, in the field of automation has important value.This paper is to establish a mathematical model of the inverted pendulum, and using the double closed-loop control system, through the inverted pendulum double closed-loop control mathematical model analysis, a fuzzy control method is applied to an inverted pendulum control, Wherein, the inner control of the inverted pendulum swing angle, the outer loop controls the position of inverted pendulum. Fuzzy controller design including the membership function and fuzzy control rule, fuzzy solution, finally using the Matlab software simulation. The fuzzy control method is applied to an inverted pendulum control system, fuzzy control can play in the control of nonlinear system, complex object systems control advantages, simplify the design, improve the stability of system.Key words: Inverted pendulum,Mathematical model,Fuzzy control,Matlab目录摘要 (I)Abstract.............................................................................................................................................. I I 1 绪论 (1)一阶倒立摆系统研究的意义 (1)一阶倒立摆系统在国内外研究综述 (1)本论文的研究内容和所用方法 (2)2 一阶倒立摆数学模型的建立与控制系统 (3)一阶倒立摆的数学模型 (3)一阶倒立摆系统的动力学分析 (4)系统微分方程的线性化 (5)系统微分方程状态空间表示 (6)一阶倒立摆定性分析 (7)系统的稳定性、能控性和能观测性判据 (7)基于状态方程的系统定性分析 (8)一阶倒立摆控制系统 (11)一阶倒立摆控制系统硬件 (11)一阶倒立摆系统总体控制框图 (11)3 模糊控制的基本原理 (15)模糊控制理论的基本概念 (15)模糊逻辑操作 (16)模糊规则与模糊推理 (16)模糊控制系统 (16)模糊控制系统的组成 (17)模糊控制系统的特点 (18)模糊控制器 (18)模糊控制器的组成 (18)模糊控制器的结构 (19)4 双闭环模糊控制系统设计 (21)建立双闭环模糊控制系统 (21)模糊控制器的设计 (21)隶属函数的确定 (21)模糊控制规则 (23)输出向量的解模糊 (24)建立模糊控制查询表 (25)5 一阶倒立摆系统仿真及其分析 (28)MATLAB及其模糊工具箱的介绍 (28)MATLAB的主要特点 (28)MATLAB的基本组成 (29)一阶倒立摆模糊控制系统仿真实验 (30)利用GUI编辑FIS结构文件,即设计模糊控制器 (30)建立一阶倒立摆模糊控制系统的仿真模型图 (33)6 结论与展望 (38)参考文献 (39)致谢 (40)系统总体框图 (41)系统总体原理图 (42)1 绪论一阶倒立摆系统研究的意义一阶倒立摆在稳定性控制问题中具有成本低廉,结构简单,形象直观,物理参数和结构易于调整的优点。
一级直线倒立摆系统模糊控制器设计---实验指导书

一级直线倒立摆系统模糊控制器设计实验指导书目录1 实验要求................................................................................. . (3)1.1 实验准备................................................................................. . (3)1.2 评分规则................................................................................. . (3)1.3 实验报告容................................................................................. .. (3)1.4 安全注意事项................................................................................. .. (3)2 倒立摆实验平台介绍................................................................................. .. (4)2.1 硬件组成................................................................................. . (4)2.2 软件结构................................................................................. . (4)3 倒立摆数学建模(预习容) .............................................................................. (6)4 模糊控制实验................................................................................. (8)4.1 模糊控制器设计(预习容)............................................................................... (8)4.2 模糊控制器仿真................................................................................. (12)4.3 模糊控制器实时控制实验................................................................................. .. (12)5 附录:控制理论中常用的MATLAB 函数................................................................................. (13)6 参考文献............ .................................................................... (14)1 实验要求1.1 实验准备实验准备是顺利完成实验容的必要条件。
模糊控制一级倒立摆matlab实现
模糊控制一级倒立摆MATLAB实现课程:现代仿真技术及应用专业:控制理论与控制工程学号:姓名:模糊控制一级倒立摆MATLAB实现摘要:一级倒立摆是一个典型的非线性,强耦合,多变量的不稳定系统,为了控制其平衡性,对一级倒立摆系统建立了数学模型,采用模糊控制法设计了控制器,并用MATLAB/SIMULINK对控制系统进行了仿真实验研究,实验结果表明,模糊控制器具有良好的控制效果。
关键词:一级倒立摆;模糊控制;MATLAB/SIMULINK一引言倒立摆最初研究开始于20世纪50年代,麻省理工学院的控制论专家根据火箭发射器原理设计出一级倒立摆实验设备,而后倒立摆就成了验证控制方法和理论的实验平台,被广泛应用与实验教学中。
一级倒立摆具有结构简单,便于模拟的优点,同时它在控制过程中能够优先的反应控制中的许多关键问题,如系统的非线性、鲁棒性等。
因此对倒立摆的研究一直是控制领域中经久不衰的课题。
二一级倒立摆数学模型的建立在忽略各种摩擦之后,一级倒立摆系统是由小车、质量块和匀质杆组成的系统,通过控制小车位置,以使小车上的倒立摆始终处于反转垂直位置,左右倾斜角在︒±5.0范围内,原理结构图如图1.1所示。
图1.1 一级倒立摆原理结构图对该模型进行受力分析,作如下假设:M 小车质量 1.096Kg m 摆杆质量 0.109Kg b 小车摩擦系数 0.1N/m/sec I 摆杆惯量 0.0034Kg*m*m T 采样频率 0.005sl 摆杆转动轴心到杆质心的长度 0.25m F 夹在小车上的力 x 小车位置φ 摆杆与垂直向上方向的夹角θ 摆杆与垂直向下方向的夹角分析小车水平方向所受的合力:N x b F xM --= 摆杆水平方向的合力:)sin (22θl x dtd m N +=即: θθθθsin cos 2ml ml x m N -+= 把这个等式代入上式中,得到系统的第一个运动方程:F ml ml x b xm M =-+++θθθθsin cos )(2 对摆杆垂直方向上的合力进行分析,得到以下方程:θθθcos 2 ml ml mg P --=- 力矩平衡方程如下:θθθ I Nl Pl =--cos sin合并以上两个方程,得到第二个运动方程:θθθcos sin )(2xml mgl ml I -=++ 线性化后两个运动方程如下:⎪⎩⎪⎨⎧=-++=-+u ml x b x m M x ml mgl ml I φφφ)()(2 对方程组进行拉普拉斯变换,得到摆杆角度和小车位移之间的传递函数:mgls ml I mls X s -+=Φ22)()()( 将实际参数代入后得到实际模型:26705.00102125.002725.0)()(2-=Φs s X s 三 模糊控制器控制 3.1 模糊控制原理模糊逻辑控制简称模糊控制,是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字智能控制技术。
基于模糊控制的一阶倒立摆系统稳定控制研究
基于模糊控制的一阶倒立摆系统稳定控制研究作者:雷世恒李淑清来源:《科技创新与应用》2017年第01期摘要:利用模糊控制方法对一阶倒立摆进行了控制。
利用Matlab对线性矩阵不等式方法控制的算法模型进行了仿真,并从中提取数据用于模糊控制。
在模糊控制方法[1]中,设计了一种模糊集长度从两侧至中间递减的模糊集,并针对不同模糊数量时的控制结果进行了仿真对比,最后,对比了不同模糊控制方法的响应曲线及效果分析。
关键词:模糊控制;控制参数;置信度;响应曲线1 方法概述一阶倒立摆为双输入单输出控制系统,输入量为角度及角速度,输出量为力,用于调整摆的角度。
本文使用经典的Mamdani模糊系统[2]。
输入采用三角形模糊器[3],采用中心解模糊器构造模糊系统[4]。
用于规则提取的数据来源于T-S fuzzy模糊控制[5]。
2 参数提取由Matlab仿真得到用于提取规则的参数,该方法使用线性矩阵不等式,求解控制参数。
采集该方法的控制量、角速度及角度,采集时要保证采集数据的范围足够广阔,避免出现置信度很低的规则。
求解线性方程组,得到仿真数据,为保证数据的范围足够广,要多次修改初值以确保提取大量的数据。
3 创建模糊集本文设计的模糊划分是非等距的对称三角形模糊划分,中间点距离近,两侧节点距离大。
模糊划分的论域为:训练数据的最大绝对值的1.01倍。
模糊集的设计思路如下:以7个模糊集为例,产生7个模糊集需要在X轴坐标上设计9个点,从左向右,依次每4个点生成一个模糊集,4个点中的2、3两点重合。
因此,设计模糊集的任务就变成了设计X轴上的9个坐标点,设计方式如图1所示:图1中仅仅画出坐标轴正半轴,负半轴部分将与正半轴部分对称。
从图中可以看出,由坐标点所截出的相邻线段的长度之差为d,针对这种划分方式,可以抽象出计算坐标点的公式,如下:其中,L表示X轴正方向上的模糊集的长度,N为设计的模糊集数量。
根据计算得到的d,计算每个点的坐标值。
生成节点后,利用节点生成模糊集。
基于模糊控制的一级倒立摆控制系统设计【毕业作品】
BI YE SHE JI(20 届)基于模糊控制的一级倒立摆控制系统设计所在学院专业班级自动化学生姓名学号指导教师职称完成日期年月II摘要倒立摆系统是研究控制理论的典型实验装置,具有价格低廉,结构简单,参数易于调整等优点。
但是倒立摆同时也是一个典型的快速,非线性,多变量,本质不稳定系统,对于其稳定性的控制绝非易事。
也正因为如此,对于倒立摆系统控制方法的研究和开发才具有重要和深远的意义。
目前适用此系统的控制理论包括变结构控制,非线性控制,目标定位控制,智能控制等。
本文根据一级直线倒立摆系统,建立了数学模型,依据模糊控制的相关规则设计了模糊控制规则,并从位移和角度观点出发设计了双模糊控制器,经过仿真调试对重要参数进行不断的调试和优化,最终实现了“摆杆不倒,小车稳住”的总体目标。
对于实物实验系统,本文对构成倒立摆运动控制系统的电机,编码器和运动控制模块进行了比较选择,选择了交流伺服电机,增量式光电编码器和基于DSP技术的运动控制器作为主要的硬件组合,该运动控制器具有良好的性能,可以保证控制的精度。
关键词:倒立摆,模糊控制,系统设计,仿真,稳定IIAbstractInverted pendulum system is the study of the typical experiment device control theory, which is inexpensive, simple structure and easy to adjust the parameters. But it is also a system that typical rapid, nonlinear, many variables, and its essence is not stable, for its stability control is not going to be easy. Also because of this inverted pendulum system control method of the research and development are important and profound significance. At present the system for the control theory including variable structure control, nonlinear control, the goal positioning control, intelligent control, etc.According to the level of linear inverted pendulum system, this paper established the mathematical model, based on the fuzzy control rules we designed its fuzzy control rules, and from the view point of view design displacement and the dual fuzzy controller, through the simulation test of continuing the important parameters of debugging and optimization, and finally achieved "swinging rod, the car is not steady overall goal.For physical experiment system, this paper constitutes inverted pendulum motion control system of motor, encoder and motion control module are compared choice. Choose the ac servo motor, the solid-axes photoelectric encoder and the motion controller based on DSP technology as the main combination of hardware, this controller has good performance, and can ensure the precision of the control.Key words: inverted pendulum,Fuzzy control,System design ,The simulation,stabilityII目录摘要 (I)Abstract.......................................................................................................................................... I I 目录 (III)第一章引言 (1)1.1课题研究目的及意义 (1)1.3倒立摆系统介绍 (3)第二章倒立摆系统建模 (6)第三章模糊控制 (11)3.1概念 (11)第四章基于模糊控制的一级倒立摆系统设计 (15)4.1控制系统部件选择 (15)4.1.1位置传感器选择 (15)4.1.3运动控制模块 (17)4.2 模糊控制器设计 (18)4.2.1 确定模糊控制器的结构 (19)4.2.2位置模糊控制器的设计 (19)4.2.3角度模糊控制器设计 (27)4.3simulink仿真 (28)4.3.1将simulink与模糊控制器相关联 (28)4.3.2进行仿真 (32)结论 (39)III参考文献 (40)致谢 (41)III第一章引言1.1课题研究目的及意义倒立摆系统作为一个本身绝对不稳定的非线性系统,兼具高阶次、多变量、强耦合的特点。
旋转倒立摆的模糊控制

WORD文档下载可编辑旋转倒立摆的模糊控制摘要:该文针对一级旋转倒立摆系统进行研究。
基于Lagrange方程进行了对旋转倒立摆的系统建模,并在Matlab环境下使用了模糊控制,实现了倒立摆的良好控制,采用积分消除了稳态误差。
实验证明,此种模糊控制方法有一定的鲁棒性并且控制效果较好。
关键词:一级旋转倒立摆;模糊控制;Matlab一、控制对象一级旋转倒立摆倒立摆系统是自动控制理论中比较典型的控制对象,许多抽象的控制理论概念如系统稳定性、可控性和系统抗干扰能力等,都可以通过倒立摆系统直观地表现出来。
因此它成为自动控制理论研究的一个较为普遍的研究对象。
倒立摆系统作为一个被控对象,是快速、多变量、开环不稳定、非线性的高阶系统,必须施加十分有力的控制手段才能使之稳定。
对倒立摆的研究在现实中也有一定的指导意义,航天器的发射就是很好的例子, 未来仿人类机器人的发展也离不开倒立摆模型。
一直以来,很多种控制方法已经应用到倒立摆的控制当中本文采用了一种模糊控制方法实现了对一级旋转倒立摆的控制。
目标是使倒立摆在保持平衡的同时,旋臂还能够快速跟踪一个位置给定信号。
该次设计所研究的旋转倒立摆系统模型如图1所示,倒立摆模块由倒立摆的摆杆和一个支撑摆杆的旋转臂组成,摆杆固定在旋转臂一端,可以在垂直于转臂的方向上做360度的转动。
旋臂的另一端安装在一个旋转伺服装置上,伺服装置通过电机驱动齿轮转动来实现旋臂在水平面内做360度的旋转。
在摆杆的底端以及旋臂的里端均装有光电编码器,用来检测角度的变化并将信号传送给计算机。
涉及到的参数有:θ1 ——旋转臂的旋转角l1 ——旋转臂从电机轴到摆支撑点的长度——0 . 25mJ1 ——为旋转臂的转动惯量——0 . 01kg ·m2θ2 ——倒立摆的旋转角l2 ——倒立摆的旋转轴到重心的长度——0 . 1mm2 ——倒立摆的质量——0 . 1kgJ2 ——倒立摆的转动惯量——0 . 001kg·m2M ——电机产生的转矩二、设计方案既涉及设计过程(一)、建模:系统采用拉格朗日动力学分析法[1] 建立运动方程为:因摆杆摆动幅度小, 可认为sinθ1≈θ1 , sinθ2≈θ2 , cos (θ2 +θ1) ≈1 , 由此将(1) 式和(2) 式作线性化处理,得:由(3) 式和(4) 式可求出:令系统的状态矢量为x = [ x1 x2 x3 x4 ]′=[θ1 θ2 θ1′θ2′]′,得状态空间方程:即输入而输出部分的故输出为由于旋转倒立摆系统自身的特点,在没有控制或控制效果不佳的情况下很难稳定。
基于模糊控制算法的倒立摆系统的研究
基于模糊控制算法的倒立摆系统的研究摘要:倒立摆是一个经典的控制系统研究对象,具有非线性、强耦合等特点,传统的控制方法在其控制中存在一定的困难。
因此,本研究基于模糊控制算法对倒立摆系统进行研究,旨在提高系统的控制性能和稳定性。
通过建立数学模型,设计模糊控制器,并进行仿真实验,分析模糊控制算法在倒立摆系统中的应用效果。
关键词:倒立摆,模糊控制,非线性,稳定性,控制性能1. 引言倒立摆作为一个非线性、强耦合的系统,其控制一直是控制理论研究领域的热点之一。
传统的控制算法,如PID控制,往往难以满足倒立摆系统的控制需求。
模糊控制算法因其对非线性系统具有较好的适应性而备受关注。
本研究旨在探索基于模糊控制算法的倒立摆控制方法。
2. 倒立摆系统建模倒立摆系统由一个可旋转的杆和一个质点组成,质点位于杆的一端,通过一个关节连接。
系统的运动受到重力和杆的惯性力的影响。
通过运动学和动力学方程,可以得到倒立摆系统的数学模型。
3. 模糊控制器设计为了实现对倒立摆系统的精确控制,本研究设计了一个模糊控制器。
模糊控制器的输入为系统的误差和误差变化率,输出为控制信号。
通过设定适当的模糊规则和隶属度函数,模糊控制器可以根据当前的系统状态和误差,生成合适的控制信号。
4. 仿真实验与分析通过Matlab/Simulink工具进行仿真实验,对比模糊控制算法和传统的PID控制方法在倒立摆系统中的控制效果。
实验结果表明,模糊控制算法具有较好的控制性能和稳定性,能够实现对倒立摆系统的精确控制。
5. 结论本研究基于模糊控制算法对倒立摆系统进行了研究。
通过建立数学模型和设计模糊控制器,实现了对倒立摆系统的控制。
仿真实验结果表明,模糊控制算法具有较好的控制性能和稳定性,能够满足倒立摆系统的控制需求。
未来的研究可以进一步优化模糊控制器的设计,提高系统的控制精度和响应速度。
倒立摆-模糊控制-开题报告2

毕业设计(论文)开题报告学生姓名: 学号:专业:设计(论文)题目:直线倒立摆智能控制方法研究指导教师:2012 年3月7日毕业设计(论文)开题报告1. 结合毕业设计(论文)课题情况, 根据所查阅的文献资料, 每人撰写2000字左右的文献综述:2000字左右的文献综述:文献综述1.引言:倒立摆系统是一个比较复杂的, 带有快速、高阶次、多变量、严重非线性绝对不稳定和非最小相位系统的机电系统, 它的稳定控制是控制理论应用的一个典型范例。
倒立摆系统一直是控制理论中非常典型的实验设备, 也是控制理论教学和科研中不可多得的典型物理模型。
虽然它的数学模型复杂但倒立摆系统的稳定控制能非常直观地说明控制理论的优点和有效性, 同时它还涉及到系统辨识、非线性系统等方面, 所以倒立摆系统的控制一直是控制领域研究的热点[1]。
倒立摆系统的最初研究开始于二十世纪五十年代, 麻省理工大学电机工程系设计出单级倒立摆系统这个实验设备。
后来在此基础上, 人们又进行拓展, 产生了各式各样的倒立摆:有悬挂式倒立摆、平行倒立摆、环形倒立摆、平面倒立摆;倒立摆的级数有一级、二级、三级、四级乃至多级;倒立摆的运动轨道可以是水平的, 也可以是倾斜的[2]。
倒立摆系统已成为控制领域中不可或缺的研究设备和验证各种控制策略有效性的实验平台, 本设计主要针对直线倒立摆进行研究。
2.倒立摆的系统特性分析倒立摆系统是典型的机械电子系统。
无论哪种类型的倒立摆系统都具有如下特性:1.欠冗余性。
一般地, 倒立摆控制系统采用单电机驱动, 因而它与冗余结构, 比如说冗余机器人有较大不同。
之所以采用欠冗余是要在不失系统可靠性的前提下节约经济成本或者有效的空间。
2.不确定性。
主要是指建立系统数学模型时的参数误差、测量噪声以及机械传动过程中的非线性因素所导致的难以量化的部分。
3.耦合特性。
倒立摆摆杆和小车之间, 以及多级倒立摆系统的上下摆杆之间都是强耦合的。
这既是可以采用单电机驱动倒立摆控制系统的原因, 也是使得控制系统的设计、2. 本课题要研究或解决的问题和拟采用的研究手段(途径):1 要研究或解决的问题:1.建立一级和二级倒立摆数学模型;2.分析倒立摆系统特性, 研究如何利用智能控制算法实现其稳摆控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
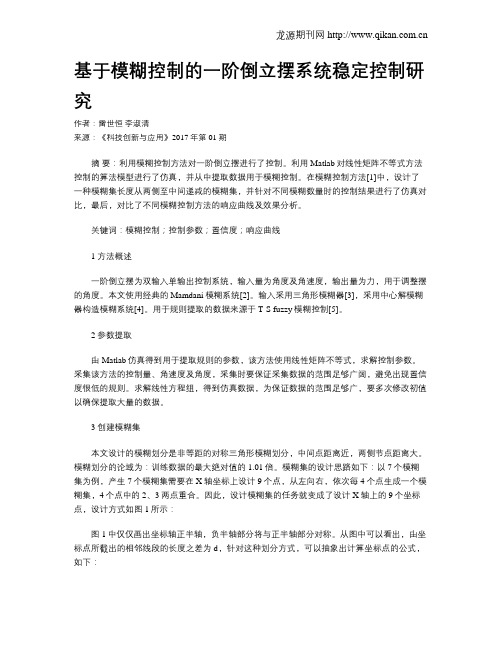
2.2 SIRMs控制器结构图 如图5为SIRMs控制器的结构图,它包括四 个SIRMs和四个动态加权量(DID)。SIRMs模糊控 制器的每条规则都由一个前件变量和一个后件变 量组成。由于输出变量只有一个,而多个输入变 量产生的输出结果对被控对象的影响并不相同, 因此不能简单的相加,需要乘以相应的动态加权 量,然后再求和来控制倒立摆系统。
了温度控制精度,确保了隔音棉的封口质量,具 有重要的应用价值和实际意义。 参考文献:
[1] 花福安,李建平,赵志国,等.冷轧薄板试样电阻加热过程 分析[J].东北大学学报,2003,28(9):1278-1279. [2] 李昂.积分分离PID控制算法在PLC炉温控制系统中的应 用[J].电子设计工程,2013,21(24):54-55. [3] 敖雯青,王寿增,张晋.电阻式加热炉温控制数理模型研究 [J].工业炉,2012,34(1):37-38. [4] 张晓年.线绕电阻器表面温升与功率关系的分析[J].中国 电子商情:基础电子,2012(3):70-71. [5] Huh H, Kang W J.Electrothermal analysis of electric resistance spot welding processes by a 3-D finite element method[J].Journal of Materials Processing Technology, 1997,63:672-677. [6] BECK J V,BLACKWEI L B,HAJI-SHEIKH A. Comparison of some inverse heat conduction methods using experimental data[J].Heat Mass Transfer, 1996:3649-3657.
i
+ -
θ d/dt Fuzzy 2
图2 并联模糊控制结构图
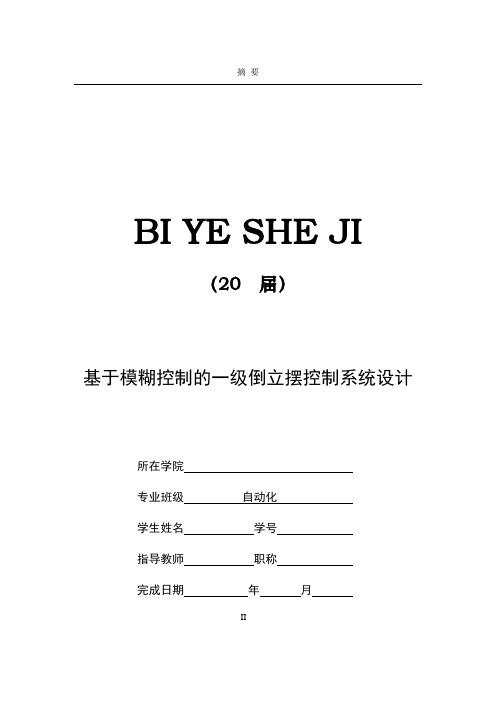
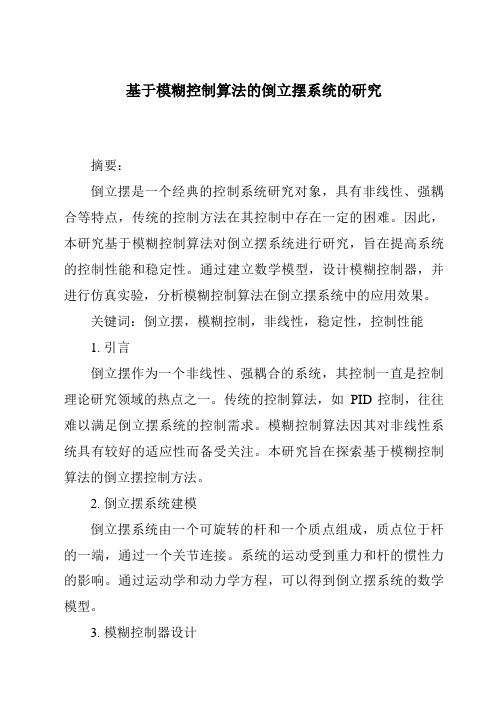
1.3 实时控制实验 实时控制实验结果如图3和图4所示,表明这 两种模糊控制方法都是有效的。其中,虚线代表 摆杆角度,单位是rad;实线代表小车位置,单位 是m。实验结果表明,两种模糊控制方法均可实 现单级倒立摆系统的稳定控制,控制效果较经典 模糊控制算法已有所改善,但稳定时间和稳态误 差不够理想。究其原因,主要是没有考虑控制的 优先级问题。在单级倒立摆系统运动控制中,摆 杆角度和角速度的控制直接影响到控制的成功, 而小车位置和速度的控制影响相对较弱。也就是 说,在摆杆尚未达到平衡位置之前应优先进行摆 杆控制,只有摆杆基本平衡时才能开始小车位置 控制。为此,提出了一种基于SIRMs模型的模糊控 制器,所建立的动态参数权重使得摆杆角度控制 优先于小车位置控制, 故倒立摆不会因为同时控制
收稿日期:2014-03-20 作者简介:黄彦海(1989 -),男,河南人,硕士研究生,主要从事智能控制算法研究。 第37卷 第1期 2015-01(上) 【1】
位置和小车速度,输出变量是一个虚拟的弧度 值。第二个模糊控制器输入变量是摆杆角度和角速 度,输出变量为倒立摆系统控制量,如图1所示。 1.2 并联模糊控制 并联模糊控制是将两个模糊控制器并联起来 以实现对单级倒立摆的控制。第一个模糊控制器 控制小车位置,两个输入变量是小车位置和小车 速度,输出变量为u1。第二个模糊控制器控制摆杆 角度,两个输入变量是摆杆角度和摆杆角速度, 输出变量为u 2 。融合函数 f (u ) = a1 u1 + a u 把两个 模糊控制器的输出融合之后得到倒立摆系统的控 制量u,如图2所示。
0.3
图5 SIRMs控制器结构图
0.2 0.1
ang(rad) pos(m)
2.3 模糊规则设定 根据单级倒立摆控制经验知道,当摆杆偏离 竖直位置角度较大时,应该优先进行摆杆角度控 制,当摆杆接近竖直位置时,应该更多地考虑小 车位置控制,这样就可以在摆杆倒立的基础上实 现小车位置控制。 倒立摆系统的每个输入变量都有相应的SIRM 和动态加权量。取每个SIRM的输入隶属度函数和 控制规则都相同,定义每个输入变量有五个模糊 子集NB、NM、Z、PM、PB,表示在[-1.0,1.0] 上均匀分布的负大、负中、零、正中、正大的三 角形或梯形隶属函数。此时动态加权量就成为控 制器能否成功控制倒立摆的关键,动态加权量越 大,输入变量对系统的作用越大。四个动态加权 量的前件变量均为摆杆角度的绝对值,定义三个 模糊子集为DS、DM、DB,表示在[0.0,1.0]上均 匀分布的小、中、大的三角形或梯形隶属函数。 控制规则如表1、表2所示,此时模糊控制器只有 32条控制规则,系统变得更加简单。
量对系统的影响,有效的实现单级倒立摆系统的 稳定控制。相对于其他模糊控制器,基于SIRMs 模型的模糊控制器可以在较短时间内达到摆杆倒 立、小车回到初始位置的控制目标,且跟踪速度 快,超调量小,具有较强的鲁棒性。
1 串/并联模糊控制器设计及实验
模糊控制是根据人们的经验来确定模糊规则 的,随着输入变量个数的增多,控制规则数会呈 指数增长,即所谓的“规则爆炸”。单级倒立摆 有四个输入变量,如果采用一个模糊控制器,每 个输入变量定义7个模糊子集,则会有74=2401条控 制规则。因此,如何降低多变量系统中模糊控制 器维数成为人们研究的重点。 文章中采用增加模糊控制器的个数的方法来 降低输入变量维数,将单级倒立摆控制分成摆杆 控制和小车控制[5,6],分别为其设计模糊控制器,最 后将两个模糊控制器串联和并联[7,8],实现单级倒立 摆的稳定控制。此时控制规则数仅为2×72=98条。 1.1 串联模糊控制 串联模糊控制外环控制小车位置,内环控制 摆杆角度。第一个模糊控制器的输入变量是小车
wiD wi Bi wi
(2)
基本权重w i保证了相应的输入量对控制过程 的必要作用,动态权重定义为 Bi wi ,表示随着系 统控制情况的变化,相应输入对系统控制的重要 程度。SIRMs得到的输出量f为:
f = ∑ wiD f i
i =1
n
(3)
它是所有SIRM模型的输出f i 与其动态加权量
表2 前件变量 动态变量控制规则
2) | wi (i 3, 4) 后件变量 wi (i 1,
x
.
DID-1
ᔦ ϔ ࣪
SIRM-1 DID-2
x
ϕ
SIRM-2 ໘ ⧚ Abs DID-3
SUM
f
ϕ
.
SIRM-3 DID-4
DS DM DB
1.0|0.0 0.5|0.5 0.0|1.0
SIRM-4
Fuzzy 2
ऩ㑻 צゟᨚ
0.1 0 -0.1
图1 串联模糊控制结构图
-
-0.2
00.51源自1.522.5
3
3.5
4
4.5
5
ᯊ䯈V ᯊ䯈 V
+
x d/dt Fuzzy 1
u1 + f(u) + u2 ऩ㑻 צゟᨚ
图4
并联模糊控制实验
2.1 SIRMs模型 单一输入规则群(SIRMs)动态加权模糊推理模 型将多维模糊推理问题转化为一维模糊推理问题 来解决,大大减少了模糊规则数。在SIRM中每个 输入变量有: (1) SIRM - i : {Ri j : if xi = Ai j then f i = Ci j }m j =1
单级倒立摆模糊控制研究
Research on fuzzy control of single inverted pendulum 黄彦海,张 镭,张朋朋,李 浩 HUANG Yan-hai, ZHANG Lei, ZHANG Peng-peng, LI Hao
(河南大学 物理与电子学院,开封 475001) 要:单级倒立摆系统包括四个输入变量,经典模糊控制算法同时对四个输入变量进行模糊推理,容 易造成模糊规则数过多。根据增加模糊控制器个数来减少输入变量维数的思想,设计了串联 模糊控制器和并联模糊控制器,有效控制了单级倒立摆系统的运动,但稳定时间和稳态误差 不够理想。故提出了一种基于单一输入规则群(SIRMs)动态加权模糊推理模型的模糊控制 器,实现了单级倒立摆的稳定控制,该控制器通过引入输入变量重要度因子,保证摆杆控制 优先于小车控制。实时控制实验表明:系统跟踪速度快,具有较强的鲁棒性和良好的动静态 特性,验证了该模糊控制器的有效性。 关键词:单级倒立摆;串联模糊控制;并联模糊控制;单一输入规则群 中图分类号:TP23 文献标识码:A 文章编号:1009-0134(2015)01(上)-0001-03 Doi:10.3969/j.issn.1009-0134.2015.01(上).01 摘
【2】 第37卷 第1期 2015-01(上)
其中,SIRM-i表示SIRMs的第i个输入,R ji是 SIRM-i的第j个规则。x i表示第i个输入变量,A ji表 示SIRM-i的第j条规则中模糊变量xi的模糊集,fi表 示SIRM-i的结论部分的变量,cij表示SIRM-i的第j条 规则中的输出变量值,mi表示SIRM-i的规则总数。 为表示每个输入变量的重要性程度,SIRMs中 对每个输入变量引入一个动态加权量 :
2 2
角度和小车位置而失去稳定性。
2 基于SIRMs模型模糊控制及实验
0.3 0.2 0.1
ᐙؐ
pos(m)
0 -0.1 -0.2
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
ᯊ䯈V ᯊ䯈 V
图3 串联模糊控制实验
0.3
+
x d/dt Fuzzy 1
0.2
ang(rad) pos(m)
+ -
φ
ᐙؐ
d/dt
表1
SIRMs模糊控制规则 后件变量fi(i=1,2,3,4) -1 -0.5 0 0.5 1
前件变量xi(i=1,2,3,4) NB NM Z PM PB