第二章 交直型电力机车的功率因数 - 中国工控网
第二章交直型电力机车的功率因数
定义谐波系数(又称畸变率THD)HF
谐波电流 HF 基波电流
I
2
I
2 1
I1
1 2
第一 概述
PF
有功功率 视在功率
U1I1 U1I
U1I1 cos1 U1I
I1 cos1 I
cos1
PF .DF
U1 电网电压的有效值 I1 输入的基波电流 I 输入电流的有效值
I1 电流波形畸变系数 I
DF cos 电流的相移系数
第一节 概述
2、无功的危害 ①增大电网电压降;
②增加电网损耗; ③降低电网和电气设备的利用率。 对机车而言,电网电压低,机车牵引力不能充分发挥。
就目前我同高速发展铁道交通,重点发展重载(货运) 和高速(客运),电网的利用率变得非常重要。
第一节 概述
3、谐波有危害 ①对电网邻近的通讯线路干扰;
②导致继保护装置误动作; ③使变压器、电气线路、电容等绝缘老化,寿命减小; ④引起电网上其它旋转电机附加损耗和噪声; ⑤激发电网局部振荡,引起谐波电流放大; ⑥引起电网波形畸变。
对机车而言,会引起保护误动作。 机车采用:多段半控桥和加装功率因数
补偿器提高功率因数。
第一节 概述
4、功率因数的定义
前提假设:电网电压无畸变为正弦波。(而电网电流为非 正弦波)
功率因数:
PF
有功功率 视在功率
U1I1 U1I
I1 cos1
U1I
I1 cos1
I
cos1
这里定义功率因数,与学过的线性电路电路中的功率 因数有区别。这里电流是非正弦的,只有基波电流与输 入电网电压同频率,产生有功功率,其他高次谐波电流 与电网电压频率不同,只能产生无功功率。
交直型电力机车的功率因数
(3)采用相控调压,可取消笨重的有触点式调压开关,调压时 不必切换主电路,故不需要限流元件,也不会有电弧产生。
§1 概述
3、相控整流调压的缺点: 交直型整流机车的最大缺点之一是功率因数
输出电压越低,功率 因数越低。
§3 半控整流电路的功率因数
u
id
wt
i u
i Id
wt
假设:L=∞,整流电流平直,不 考虑换向重叠角γ,则电流i为方 ud 波。
i1 wt
§3 半控整流电路的功率因数
• 根据电压的波形,可以计算出整流电压的平均值:
U d
1
2U sintdt
2 2 U 1 cos
§3 半控整流电路的功率因数
i Id wt
2
an
Id cos ntdt
交直型电力机车的功率因数
§1 概述
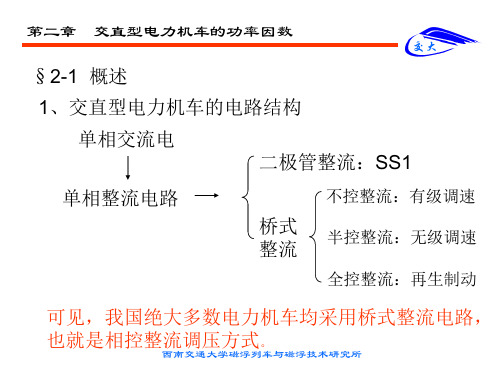
1、交直型电力机车的电路结构
单相交流电
二极管整流:SS1
单相整流电路
桥式 整流
不控整流:有级调速 半控整流:无级调速
全控整流:再生制动
可见,我国绝大多数电力机车均采用桥式整流电路, 也就是相控整流调压方式。
§1 概述
2、相控整流调压的优点:
(1)实现牵引电机端压平滑无级调节.可以减少调压过程中的 电流冲击,使牵引电机力矩变化平滑,在机车起动时可以 较好地利用轮轨粘着力,一般可使起动牵引力提高8%~10 %;在运行中可以获得机车工作范围内的任意牵引力和机 车速度;
DF
cos1
cos
2 3
换向重叠角取决于电压级位、变压器漏抗、负载电流。
第二章 交直型电力机车功率因数
§2-1 概述
交大
• 谐波系数
HF
I I 1 2 I1
2 2 1
• 相移系数
DF cos1
基波电压与基波电流之间的相位系数。 可见,机车整流电路的谐波和功率因数可以用PF、 DF、HF来描述。
西南交通大学磁浮列车与磁浮技术研究所
§2-2 整流电路的功率因数 §2-2-1 不控整流电路的功率因数
西南交通大学磁浮列车与磁浮技术研究所
§2-3 多段桥顺序控制
交大
§2-3-1 二段半控桥
a1 A i ud x1 a2 i ud2 X x2
西南交通大学磁浮列车与磁浮技术研究所
电路结构: 变压器副边绕组分成电压 相等的a1x1,a2x2; 每段绕组接一个半控桥, RM1、RM2; 两个半控桥串联。
Ud
1
2U sin tdt
2 2
U cos
U d 0 cos
Ud0 为α=0时的整流电压平均值,也是整流电路的最 大输出电压平均值。
西南交通大学磁浮列车与磁浮技术研究所
§2-2-2 全控整流电路的功率因数
交大
• 对输入电流进行傅利叶分解,可得:
i I 0 an cos nt bn sin nt
第二章 交直型电力机车的功率因数
交大
§2-1 概述
1、交直型电力机车的电路结构
单相交流电
二极管整流:SS1
单相整流电路 桥式 整流
不控整流:有级调速 半控整流:无级调速 全控整流:再生制动
可见,我国绝大多数电力机车均采用桥式整流电路, 也就是相控整流调压方式。
西南交通大学磁浮列车与磁浮技术研究所
交直型电力机车电气线路—电力机车电气线路概述

机车采用重联运行可以减少乘务人员,在干线电力机车上,一般
二、过电压保护 过电压是指对电气设备绝缘有危险的电压 升高,它是由系统的电磁能量发生瞬间突变 所引起的。机车过电压有大气过电压和操作 过电压两种,见图1。为了防止大气过电压 带来的危害,在机车顶部装有放电间隙或氧 化锌避雷器;为了防止操作过电压带来的危 害在变压器二次侧绕组并联阻容吸收装置。
图1 过电压保护
采用两台机车重联,由于一台机车故障后,会对整列列车运行产生较
大影响,所以采用一组乘务人员操纵本务机车,而在重联机车上设专
人进行监视,发现故障时及时予以处理。
三、控制电路
机车控制电路是一种逻辑线路,属于低压直流小功率电路,主要 由司机控制器、低压电器、主电路与辅助电路中的各电器电磁线圈和 联锁、开关等构成,通过司机台上的按键开关和司机控制器手柄位置 操纵,完成对主电路、辅助电路中各电气设备工作的控制,从而实现 机车牵引、制动的操纵和控制。
控制电路是机车三大线路中最复杂的部分,就机车运行中出现的 故障而言,控制电路中故障也较多。因此,熟练地掌握控制电路原理 ,就能在平时对机车进行全面保养,在发生故障时能迅速准确的进行 分析与处理,以确保行车安全。
电力机车电气线路概述
1
电气线路的组成及功能
2
机车电气线路中的保护
3
电气线路常用的联锁
4
电力机车的重联运行
1 电气线路的组成及功能
最新交直型电力机车主电路与辅助电路

M1 M2 M3
o2
9 x2
48
45 43 41
39
46 44 42 40
D5 Lp2 M4 M5 M6
D6 D2
图1-2 SS1机车主电路原理
一、SS1型机车主电路(续2)
1. 调压过程 QKT-18组合开关和TK26反向开关组合,使 变压器的不变绕组和可调绕组分段正接和反 接,改变整流器的输入电压,从而实现了33 级整流电压。
四、调速方式(续4)
由上可知: 有级调速分有级调压调速和有级弱磁调节速两 种;无级调速也分为无级调压和无级弱磁两种。
二者比较: 无级调速可实现牵引电流和牵引力的连续调节; 有级调速在级间变换时有电流冲击和机械冲击。
五、电气制动
两类制动:
① 机械制动:常备制动,低速时投入;
② 电气制动:一般高速时投入效果好; ➢ 电阻制动
• 能耗电阻制动:稳定可靠,多用。SS1-SS4 • 加馈电阻制动:在低速时可获大的制动力.SS5
➢ 再生制动
向电网回馈能量,功率因数低控制复杂。8K(2台)、 SS5、SS7。
习题
1、机车主电路设计时要考虑那几方面的因数? 主要涉及机及主电那些方面?
2、画出串激直流电机和并激直流电机牵引时的 牵引力(F)与速度力(V)关系曲线,并说 明其特点。
二、供电方式(续2)
③ 部分集中(架控) 同一转高架上的电机由一套整流器供电。 特点:简化了电路和变化器结构,粘着利用
较为充分,同时实现一定的冗余。
实际应用:SS1、SS3机车采用集中供电;其它部分 机车由部分集中供电,其中6K机车上有一个转
向架上两台电机分别由两套不同的整流器供电;
没有交直型车采用独立供电。
电力牵引交-直传动系统(2)

S
S
(a)电动机运行
(b)发电机运行
图2— 直流电机不同运行方式下的电磁转矩和感应电动势 T—电磁转矩; Tz—阻力转矩; Tt—拖动转矩。 11
第一节 直流牵引电机 ¾电动机工况:
克服反电势,电源向电机输入电能,产生电磁转矩,驱 动电机负载旋转,即将电能转变为机械能。
Is
T= CmφIs=CmKfIS2
24
第一节 直流牵引电机 3、机械特性 T=f(n)
将转速公式和转矩公式联立消去IS,便得到转矩与转速的方程式:
C mΦU C m C eΦ 2 T= − n RD RD
T
¾ 他励(或并励)电动机:在U不变时,φ 也不变,T = f (n)近似为一较陡负斜率的 直线,随着负载转矩的较大变化,转速仅 有很小变化,这种特性称为“硬特性” 。 ¾ 串励电动机:φ随IS而变化,根据矩特 性、转速特性及磁化曲线之间的对应关系 可求出其机械特性,随T的增加,n迅速下 降,这种特性称为“软特性”。
式中 T—电磁转矩,Tz—负载阻力转矩, T0—空载阻力转矩, TJ=Jdω/dt—惯性转矩。
电动机稳态下的转矩平衡方程式 :
T = TZ + T0
一般T0 (由摩擦损耗和铁磁损耗等引起) 较小,故
T≈TZ
16
第一节 直流牵引电机 (三)功率平衡方程式和电机效率
电磁功率:
pN 60ω pN Φ Is = Φ I s ⋅ ω = Tω P = Es ⋅ Is = 60a 2π 2πa
20
第一节 直流牵引电机 直流牵引电动机的转速特性和转矩特性
直流电动机的工作特性表示当不对电源电压及励磁电流 进行人为调节时,电动机的转速n、转矩T随电枢电流Is的变 化关系。 电机的工作特性因励磁方式不同差别很大,所以讨论时, 既要应用综合电磁过程的有关方程式,又要注意到不同励磁 方式的特点。
交直交型电力机车电气线路—交直交型电力机车辅助线路
26
指令序列控制:负责管理整个主变换装置的动作,进行保护检测运 算、接触器控制运算、对整流器以及逆变器的控制指令运算以及TCMS 的通信控制运算。整流器控制:根据网线电压、输入电流以及直流电压信号,对整流器进行PWM运算控制,确保输出直流电压稳定。 逆变器控制:根据直流电压、输出电流、主电动机转速以及扭矩指令,对逆变器进行PWM运算控制。
3.1HXD3C主/辅电源变换装置主要电气设备应用
2)整流器单元\逆变器单元
3)整流器单元\逆变器单元
23
CAPACITOREF332162EYQ0736CAP.3200+3200μFVOLT.3300VDCMASS 60kgnichicon
DC 2800V
DC 2800V
505A
510A
控制功能包含:指令序列控制,整流器控制,逆变器控制。
功能简介: 控制单元主要分为接口部分和控制运算部分,从外部传输进来的信号经过接口部分传送到控制运算部分,进行处理。然后,根据控制运算的结果,经过接口部分,对外部进行相应的控制。
3.1HXD3C主/辅电源变换装置主要电气设备应用
7) CI\ APU控制单元
HXD1C型机车辅助电路概述
HXD1C型电力机车辅助电路主要为机车的辅助设备(如牵引风机、冷却塔风机等)和生活服务设备(如卫生间、冷藏箱等)提供电源。按每个辅助机组/辅助设施的使用要求,辅助电气系统分成4个负载组。 ① 辅助逆变器变频变压供电支路,负载包括6个牵引通风机组和2个冷却塔通风机组; ② 辅助逆变器恒频恒压供电支路,负载有压缩机、水泵、油泵、空调等; ③ 主变压器辅助绕组供电220V/50Hz支路,负载包括蓄电池充电机、电炉、前窗玻璃加热器、撒砂加热器等; ④ 蓄电池充电机直流负载供电支路,负载包括照明灯、辅助压缩机、冷藏箱等。
第二章机车牵引特性及基本参数分析
牵引特性的有效范围
1、受粘着条件限制(机车牵引力始终应小于粘着牵引力)
2、受牵引电动机最大电流限制(发热) 3、受电机安全换向限制
4、受机车最大速度限制(结构速度)
当前您浏览到是第十八页,共二十三页。
当前您浏览到是第十九页,共二十三页。
当前您浏览到是第二十页,共二十三页。
ωo"=1.66+0.0075ν+0.000155 ν² 25B型、25G型客车
ωo"=1.82+0.0100ν+0.000145ν² 快速单层客车ωo"=1.61+0.004ν+0.000187 ν²
快速双层客车ωo"=1.24+0.0035ν+0.000157 ν²
当前您浏览到是第十页,共二十三页。
该速度下对应的牵引力称为持续牵引力。
当前您浏览到是第二十一页,共二十三页。
三、计算速度Vj、计算牵引力Fj
计算速度——列车在限制坡道上允许的最低通过速度。
规定:SS4 改货运最低计算速度为51.5 DF11为65.6, DF4B货运时21.8,客:29
则可知,可牵引的重量,如公式(2-51)
四、起动牵引力Fq ——启动时机车发挥的最大牵引力。
第六节、机车特征速度及特征牵引力
3个特征速度、3个特征牵引力
一、机车最高运行速度vmax
——根据担当的牵引任务所确定。 相关因素:1、牵引任务;2、线路限速;
如表2-5、2-6、2-7。
机车构造速度=1.1vmax
二、持续速度与持续牵引力
——机车全功率工况下冷却系统能力所容许的持续运行的最低速度。
W0=P ωo´+G ωo" 2、运行单位基本阻力
第2篇2交直型电力机车电路
四、调速方式(续3)
主电路设计考虑的内容
弱磁调速:
① 激磁绕组并电阻调速:SS1、SS3、SS4、 SS6;
② 相控弱磁,相控弱磁有两种不同的形式: ➢ 6K、 SS7是复励电机,由他励绕组的相
控电路励磁; ➢ 8K、SS5是串励电机、由分路晶闸管弱磁;
方式①为有级、方式②为无级。
四、调速方式(续4)
三、整流线路
主电路设计考虑的内容
50Hz单相交流整流,SS1采用二极管不控整 流;其它机车多用半控桥整流且是二段桥、三段 桥甚至四段桥。
Lp
单相 整
交流 流
输入
器
M
Rf
Lf
图1-1整流器的简化线路图
主电路设计考虑的内容
三、整流线路(续1)
Lp-平波电抗器,减小电流脉动,改善电 机换相性能。 Lf-激磁绕组。 Rf-磁场分路电阻,减小磁场电流脉动。
二、机车电路分类(续3)
② 直流辅助电路
功能:给电器控制、电子控制及照明、空调设备供电; 特点:直流110V供电,有蓄电池作后备电源; 包括:DC110V交直流变换电源、蓄电池、车灯、空调
等。 此外,用于客车牵引的机车上有DC600V直流电源供客
车车厢内空调、采暖、照明及旅客信息服务系统供 电。
二、机车电路分类(续4)
二、机车电路分类
机车电路
主电路 辅助电路 控制电路
二、机车电路分类(续1)
1. 主电路
功能:牵引和制动时,完成能量传递和转换; 特点:大功率、高电压、大电流; 主要包括:牵引变压器、整流器、牵引电机
二、机车电路分类(续2)
2. 辅助电路(有两类) ① 交流辅助电路
功能:给主电路的通风、冷却辅助电机等; 特点:三相380V交流供电,功率较小; 包括:单/三相变换器、通风电机、压缩电机等
新建客货共线铁路牵引变电所综合功率因数计算
路桥工程工程技术2015年8月·233·新建客货共线铁路牵引变电所综合功率因数计算曹雪宁中铁二十局集团电气化工程有限公司,陕西西安 710119摘要:随着国家对铁路发展的重视,中西部地区的支线铁路建设正在进行,这些铁路大多为客货共线电气化铁路。
电气化铁路的用电主要来自地方电网,电力部门对牵引变电所功率因数的考核相当严格,因此需要对不同条件下牵引变电所的综合功率因数进行计算,确保功率因数达标。
关键词:电气化铁路;综合功率因数;计算中图分类号:U223 文献标识码:A 文章编号:1671-5586(2015)46-0233-021 问题背景和意义根据国家《中长期铁路网规划》和国家对铁路等基础设施建设的投入,中西部地区路网的建设正在快速开展,其中不乏一些重要的地方支线建设。
虽然是支线铁路,但为了迎合《中长期铁路网规划》大部分都是直接建设成为客货共线的电气化铁路,方便以后向客运专线或货运专线转型。
比如新建玉林至铁山港铁路就是一条重要的地方支线,建设初期为时速160km的客货共线铁路。
旅客列车设计最高时速为160km/h,货运列车时速为60~100km/h。
根据我国客货共线开行列车的一般情况,普通旅客列车采用交直型电力机车牵引,货物列车采用功率较大的交直交型电力机车牵引。
牵引变电所的电源一般都来自地方电网,根据《力率调整电费办法》,铁路牵引变电所的功率因数不得低于0.9,否则电力部门要向铁路部门增收电费。
我国的交直型机车功率因数较低为0.8左右,而交直交型机车的功率因数较高为0.95以上,由于新建客货共线铁路上既有交直型电力机车也有交直交型电力机车,因此对牵引变电所功率因数研究不仅可以确定牵引变电所是否需要增设无功补偿装置,还可以为后期列车开行方案提供可靠依据。
2 综合功率因数计算功率因数是有功功率和视在功率的比值,即cosΦ=P/S。
但电力部门是通过查看有功电表和无功电表来对牵引变电所功率因数进行考核的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
由于输入电流正负半波对称,所以其直流分量 为零。即
I0 1 2 0 id dt 0 2
二、全控整流电路的功率因数
同理:
bn
1
1
2
i t sin ntdt
I d sin ntdt
1
2
I d sin ntdt
第一节
概述
2、无功的危害 ①增大电网电压降;
②增加电网损耗; ③降低电网和电气设备的利用率。 对机车而言,电网电压低,机车牵引力不能充分发挥。
就目前我同高速发展铁道交通,重点发展重载(货运) 和高速(客运),电网的利用率变得非常重要。
第一节
概述
3、谐波有危害 ①对电网邻近的通讯线路干扰;
②导致继保护装置误动作; ③使变压器、电气线路、电容等绝缘老化,寿命减小; ④引起电网上其它旋转电机附加损耗和噪声; ⑤激发电网局部振荡,引起谐波电流放大; ⑥引起电网波形畸变。
对机车而言,会引起保护误动作。 机车采用:多段半控桥和加装功率因数 补偿器提高功率因数。
第一节
概述
4、功率因数的定义 前提假设:电网电压无畸变为正弦波。(而电网电流为非 正弦波) 功率因数:
PF U I I cos1 I cos1 有功功率 1 1 1 1 cos1 视在功率 U1 I U1I I
可见,基波电流滞后于电源电压,基波电流 相位角等于控制角。
二、全控整流电路的功率因数
其它参数可算:
相移系数:DF cos1 cos 谐波系数:HF I 2 I12 0.4843 I1
I1 电流波形畸变系数: 0.9 I 功率因数:PF DF 0.9cos 0.9 Ud Ud0
U1 电网电压的有效值 I1 输入的基波电流 I 输入电流的有效值
I1 电流波形畸变系数 I DF cos 电流的相移系数
定义谐波系数 (又称畸变率 THD) HF 谐波电流 I 2 I 21 1 2 HF 基波电流 I1
第二节
整流电路的功率因数
ud
wt
二、全控整流电路的功率因数
1 Ud 2U sin tdt 2 2 U cos U d 0 cos
Ud0 为α=0时的整流电压平均值,也是整流电路的
最大输出电压平均值。
二、全控整流电路的功率因数
对输入电流进行傅利叶分解,可得:
i I 0 an cos nt bn sin nt
id
u
一、 不控整流电路的功率因数
i u
i
wt
假设:L=∞,整流电流平直, 不考虑换向重叠角γ,则电流i 为方波。
wt i1
一、 不控整流电路的功率因数
根据假设,变压器原边绕组流过的基波电流与电 网电压同相位。
DF cos1 1 I1 0.9 (根据傅利叶分解可得 ) I PF .DF 0.9 F 1 2
2I d cos n cos n n n 2k 0 4I d cos n n 2k 1 n
可见,输入电流只存在奇数次谐波, 不存在偶数次谐波。
二、全控整流电路的功率因数
根据以上推导,可得:
n次谐波的移相角
an n arctan n bn
二、全控整流电路的功率因数
DF 0.9 不控整流
PF
全控整流
1
Ud/Ud0
结论: 1、全控桥的功率因数 与输出电压的平均值成 正比。 2、在满电压时,功率 因数为0.9,控制角越 大,输出电压越低,功 率因数越低。
三、半控整流电路的功率因数
id
u wt
u
i
i Id wt
假设:L=∞,整流电流平直,不 考虑换向重叠角γ,则电流i为方 波。
一、 不控整流电路的功率因数
PF DF 1 0.9 理想
DF PF Id2(小) Id1(大)
实际DF
二极管整流功率因数与输出电压关系
1
Ud/Ud0
二、全控整流电路的功率因数
id T1 u i T2
u
+
α φ
wt
Hale Waihona Puke UdiT3
T4
Id
-
i1
wt
假设:L=∞,整流电流平直, 不考虑换向重叠角γ,则电流i 为方波。 电流与电压不同相,电流滞后电 压一个角度,此角度为电路的控 制角α。
这里定义功率因数,与学过的线性电路电路中的功率 因数有区别。这里电流是非正弦的,只有基波电流与输 入电网电压同频率,产生有功功率,其他高次谐波电流 与电网电压频率不同,只能产生无功功率。
第一节
PF PF .DF
概述
有功功率 U1 I1 U1 I1 cos1 I1 cos1 cos1 视在功率 U1 I U1 I I
i1 ud
wt
三、半控整流电路的功率因数
根据电压的波形,可以计算出整流电压的平均值:
Ud
1
2U sin tdt
1 cos U 2 1 cos Ud0 2 Ud0 为α=0时的整流电压平均值,也是整流电路的最大输出 电压平均值。 2 2
相移系数
电流畸变系数 功率因数 谐波系数
0.484
可见不控整流电路的功率因数较高,达到0.9。
一、 不控整流电路的功率因数
实际情况中要考虑换向重叠角γ,交流电流要滞后 交流电压,近似认为相移系数
2 DF cos 1 cos 3
换向重叠角取决于电压级位、变压器漏抗、负 载电流。 负载电流越大和电压极位越低,换向重叠角越大, 相移系数越小,相应功率因数越低,但是不是正比 关系。
第二章
交直型电力机车的功率因数
第一节 概述
1、电气化铁道机车引起的问题问题 输入单相交流,采用二极管或相控整流,直流侧 加平波电抗器。有如下问题: 电流(基波)相位滞后电网压,产生无功率; 电流非弦,有谐波电流; 此外,电气化铁道采用单相供,会造成电网三相不 对称,存在负序电流。
① ②
无功、谐波及不对称问题是电气化铁道供电系统 面临的三大问题,随着交流机车的采用不对称问题 将是主要要问题。