中国科学院力学研究所环境力学重点实验室研究工作进展
中国科学院力学研究所研发成功等离子体生活垃圾气化发电技术

中国科学院力学研究所研发成功等离子体生活垃圾气化发电技术我国生活垃圾处理方式主要是填埋和焚烧。
填埋不仅侵占大量土地,还污染地下水,是不得已而为之的选择。
尽管如此,对于土地资源紧张的地区已没有多少场地可供填埋使用。
焚烧法虽然减容比高,并能回收能量,但却因二噁英等污染问题遭到公众强烈反对,急需发展新一代的绿色环保、节能降耗的替代焚烧技术。
等离子体是物质第四态,具有许多异于固态、液态和气态的独特的物理化学性质,如温度和能量密度都很高、可导电和发光、化学性质活泼并能加强化学反应等,环保性能优良。
通过电弧放电产生高达7000 C的等离子体,将垃圾加热至很高的温度,从而迅速有效地摧毁废物。
可燃的有机成分充分裂解气化,转化成可燃性气体,可以用于能源回收,一般称为“合成气”(主要成分是CO+H)。
不可2燃的无机成分经等离子体高温处理后成为无害的渣体。
采用等离子体处理垃圾是目前减容效果最显著、无害化最彻底、资源化程度最高的绿色环保技术。
与焚烧法相比,等离子体技术最突出的优点有:(1)处理温度高:有害物质摧毁更彻底,二噁英前驱体被彻底破坏分解;(2)可采用还原性气氛或部分氧化性气氛,采用电能作为外加热源,二次污染物排放比焚烧低2-3个数量级,裂解底渣是无害的;(3)合成气流量约为焚烧烟气量的5-10%,易于净化,后处理设备尺寸大大减小,节约了投资成本;(4)能源回收效率高,将筛上物制成合成气,后续利用气体发动机发电,发电效率可高达39%,而焚烧法采用蒸汽轮机,发电效率很难超过22%;(5)等离子体系统可快速启动与停机,等离子体核心工艺灵活,可根据不同的处理目的搭配不同的配套系统;(6)整套设备紧凑,占地小,经济效益好。
更为重要的是,等离子体技术将垃圾看作是生产合成气的原料,符合新能源、环保、零碳排放以及可持续发展的概念。
等离子体法不仅在技术上比焚烧先进,而且经济效益也要更好,但投资略高。
等离子体工艺配套的后处理设备及发电系统与焚烧配套的差异很大,这也会影响系统造价及经济效益。
太湖的富营养化发生的原因与治理对策
太湖的富营养化发生的原因与治理对策摘要:太湖流域是我国经济最发达的地区之一。
又是我国著名的旅游胜地。
随着社会和经济的发展。
太湖流域的GDP总值在全国占有重要的地位,但是,由于众多人为因素的影响,已导致太湖生态环境急剧恶化,特别是水体污染与富营养化情况日趋严重。
本文简述了太湖富营养化的成因、发展与现状,并简单介绍了一些治理太湖富营养化的治理对策。
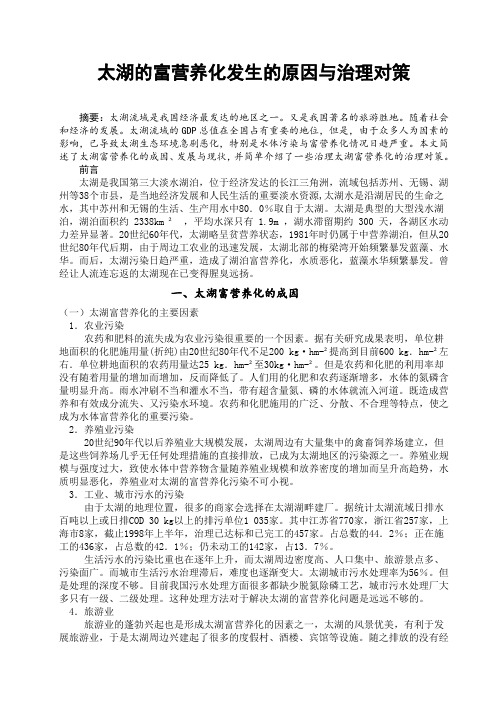
前言太湖是我国第三大淡水湖泊,位于经济发达的长江三角洲,流域包括苏州、无锡、湖州等38个市县,是当地经济发展和人民生活的重要淡水资源,太湖水是沿湖居民的生命之水,其中苏州和无锡的生活、生产用水中80.0%取自于太湖。
太湖是典型的大型浅水湖泊,湖泊面积约 2338km²,平均水深只有 1.9m ,湖水滞留期约 300 天,各湖区水动力差异显著。
20世纪60年代,太湖略呈贫营养状态,1981年时仍属于中营养湖泊,但从20世纪80年代后期,由于周边工农业的迅速发展,太湖北部的梅梁湾开始频繁暴发蓝藻、水华。
而后,太湖污染日趋严重,造成了湖泊富营养化,水质恶化,蓝藻水华频繁暴发。
曾经让人流连忘返的太湖现在已变得腥臭远扬。
一、太湖富营养化的成因(一)太湖富营养化的主要因素1.农业污染农药和肥料的流失成为农业污染很重要的一个因素。
据有关研究成果表明,单位耕地面积的化肥施用量(折纯)由20世纪80年代不足200 kg·hm-²提高到目前600 kg.hm-²左右.单位耕地面积的农药用量达25 kg.hm-²至30kg·hm-²。
但是农药和化肥的利用率却没有随着用量的增加而增加,反而降低了。
人们用的化肥和农药逐渐增多,水体的氮磷含量明显升高。
雨水冲刷不当和灌水不当,带有超含量氮、磷的水体就流入河道。
既造成营养和有效成分流失、又污染水环境。
农药和化肥施用的广泛、分散、不合理等特点,使之成为水体富营养化的重要污染。
壁虎粘附微观力学机制的仿生研究进展
壁虎粘附微观力学机制的仿生研究进展陈少华;志龙【摘要】A class of animals possesses special climbing abilities in nature, which attracts enormous academic interests. To investigate the macro- and micro-mechanisms of such animals' adhesion can not only develop relevant surface/interface mechanics, but also provide novel ideas for the design of advanced adhesive materials and appropriate adhesive system for a micro-climbing robot, and shed lights on solving methods for adhesive failure problems in MEMS/NEMS and AFM. Experiments have found that the adhesive system on gecko's foot is hierarchical, which will produce strong adhesion. There are millions of setae on a gecko's foot and each seta will branch into hundreds of spatulae. The spatula is the smallest adhesive structure in a gecko's foot, which is about 200nm in width and length, about 5nm in thickness. The adhesive behavior of a spatula on a surface looks like that of a finite-sized nano-film. The basic principle of the adhesion is due to Van Der Waals force between two surfaces. Plenty of spatulae will cause the adhesion force large enough to support the weight of a gecko. In the present paper, considering the real shape of the smallest adhesive structure, which is similar to a nano-film with a finite length, we present an overview of the main influence factors of the micro-adhesion mechanism of gecko's spatula, including the effects of adhesion length, thickness and peeling angles of a finite nano-film on the adhesion force, the effects of surface roughness andenvironmental humidity on surface/interface adhesion. Experimental investigations as well as theoretical and numerical studies are also reviewed. Finally, possible challenges and future development of the biomimetic adhesive mechanics are proposed and prospected.%本文针对壁虎粘附系统最小单元的真实形状, 类似于有限尺寸纳米薄膜的铲状纤维, 综述了对其微观粘附力学机制主要影响因素的多个研究, 主要考虑了有限尺寸纳米薄膜长度、厚度、撕脱角等对撕脱力的影响; 物体表面粗糙度以及环境湿度等对粘附的影响因素; 包括实验、理论及数值模拟的研究及结果比较. 最后给出仿生粘附力学方向仍然存在的主要科学问题及进一步的研究展望.【期刊名称】《力学进展》【年(卷),期】2012(042)003【总页数】12页(P282-293)【关键词】壁虎,;铲状纤维,;微观粘附机制,;仿生,;有限尺寸纳米薄膜【作者】陈少华;志龙【作者单位】中国科学院力学研究所非线性力学国家重点实验室,北京100190;中国科学院力学研究所非线性力学国家重点实验室,北京100190【正文语种】中文【中图分类】TB391 引言自然界一类生物,如壁虎、蜘蛛、蚱蜢、蚂蚁、苍蝇等,不但能在垂直的墙壁上停留和爬行,而且能在天花板上运动自如.这种超强粘附爬行的能力引起了人们广泛的研究兴趣,其中壁虎由于体重较大成为仿生粘附研究的主要对象.早在公元前4世纪亚里士多德就观察到“壁虎甚至能够头部向下也可以在树上自由地上下爬行”[1].一直以来,人们对壁虎等生物飞檐走壁的秘诀众说纷纭.近年来由于实验仪器的精度和分辨率大大提高,能够清楚地观察到微米甚至纳米尺寸的结构图像,壁虎等生物的粘附力学原理才真正被揭开.壁虎的粘附系统是一种多分级、多纤维状表面的结构,壁虎的每个脚趾生有数百万根细小刚毛,每根刚毛的尺寸约为 30∼130µm,刚毛的末端又分叉形成数百根更细小的铲状绒毛,每根绒毛长度及宽度方向的尺寸约为200 nm,厚度约为5 nm,如图1所示[2].美国科学家Autumn等[1,3]通过实验研究发现,壁虎超强的粘附能力主要来源于脚部大量微纳米刚毛与物体表面间的分子吸引力,即范德华力.范德华力是中性分子间一种微弱的电磁引力,壁虎脚部无数刚毛与固体表面间范德华力的累积形成超强的粘附力,足以支撑其体重.随后的实验研究进一步发现,环境湿度对壁虎粘附力亦有重要的影响[4-5],粘附力将随着环境相对湿度的增加而提高.多分级、多纤维粘附系统确保了壁虎具有超强的粘附力,而壁虎在捕食和逃跑的过程中不仅需要很强的粘附能力,而且需要轻松地脱黏,如何实现粘附和脱黏的快速交替也是仿生研究关注的重要科学问题之一.Chen和 Gao[6]注意到壁虎多分级粘附系统类似于纤维斜向排列的复合材料,具有一定的材料各向异性,据此建立了各向异性材料粘附接触模型,分析结果表明:沿着纤维排列方向拉伸时,界面粘附强度达到最大,而偏离该方向拉伸,界面的粘附强度急剧减小,且最大粘附强度能够超过最小粘附强度一个数量级,从理论上揭示了壁虎利用材料各向异性实现与固体表面间粘附强度受方向控制的宏观可逆粘附机制:改变施力方向可以实现很强的粘附和轻松的脱黏,这个结果与Yao和Gao[7]的数值分析结果一致.该宏观粘附机制随后得到了相应的实验验证[8-10].然而,壁虎粘附系统与固体表面接触的真实微观粘附依赖于系统末端数以百千万个纳米铲状纤维的粘附行为,每根铲状纤维类似于有限尺寸的纳米薄膜.其微观粘附机制的揭示对超强粘附表面和仿生爬壁机器人粘附系统的设计具有重要的作用.壁虎如何通过纳米铲状纤维实现微观的粘附和脱黏的交替?如何克服表面粗糙度,在不同粗糙度的表面实现鲁棒性粘附?环境湿度又是如何影响壁虎纳米铲状纤维的粘附力,为什么动物园管理人员向墙壁喷撒水雾时壁虎就被轻松地清除呢?另外,壁虎粘附系统最小铲状纤维是自然界优胜劣汰和长时间进化形成的结果,其结构尺寸对粘附性能是否具有重要的影响?对此类生物粘附机制的研究,一方面可以为超强仿生粘附材料、微型仿生爬壁机器人粘附系统的设计探索新的仿生设计概念和新的设计思想,另一方面亦可以为解决微纳机电系统中重要的粘附失效问题提供新的解决方法,同时发展表面/界面力学. 本文就上面提出的几个针对壁虎微观粘附机制的科学问题,以壁虎最小粘附铲状纤维为研究对象,主要介绍了当前国内外对以上几个科学问题的最新研究进展,包括实验、理论和数值模拟工作,重点介绍了作者等人最近获得的研究结果.最后为进一步深入研究壁虎等生物粘附机制提出了展望.图1 壁虎多分级粘附系统[2]2 微观粘附机制的实验及仿生实验研究2000年美国科学家Autumn等[3]利用装有双轴压阻悬臂的微机电系统测量了壁虎单根刚毛的粘附力(图2(a)),首次利用微观实验测量了壁虎粘附力.结果表明壁虎刚毛在基底上滑移5µm的距离后,切向粘附力达到最大值为(194±25)µN(图2b),该粘附力约为由壁虎体重估算得到的刚毛最大粘附力的10倍.如果壁虎所有刚毛同时达到最大粘附力,壁虎一只脚就能承受约100 N的重量,而典型的壁虎体重仅仅为几十克到一百克,安全系数达100左右.2005年德国科学家Huber等[11]通过原子力显微镜测量了壁虎单根铲状绒毛的粘附力.为了获得单根铲状绒毛,首先将从壁虎脚切下的单根刚毛粘在原子力显微镜的微悬臂上,然后利用聚焦离子束显微镜将铲状绒毛逐渐从刚毛上切掉,每根刚毛末端的绒毛的数量不超过5根,最后将带有铲状绒毛的原子力显微镜与基底接触,测量其粘附力(图2(c)).图2(d)为实验测量的力—位移曲线,第一类曲线(type 1)表示只有一根铲状绒毛从基底上拉脱,并且单根铲状绒毛的粘附力约为10 nN;第二类曲线(type 2)表示刚毛端部的两根铲状绒毛同时从基底上拉脱,粘附力为单根铲状绒毛的两倍;第三类曲线(type 3)表示两根铲状绒毛相继从基底上拉脱.研究壁虎粘附系统的微观结构,揭示微观粘附力机制对仿生粘附进行系统地设计具有很大的帮助.Geim等 [12]仿照壁虎脚的毛发结构,以电子光束微影和氧离子干刻蚀法在5µm厚的聚酰亚胺薄膜上制备长2µm,直径为 500 nm的高弹聚酰亚胺纤维阵列,当预压力为50 N·cm−2时,单根粘附纤维能提供约 70 nN的粘附力,每平方厘米面积可负重 3 N.Yao等 [8]受壁虎粘附能力的启发,利用具有倾斜贯通孔的Te flon模具制备了PDMS仿生纤维阵列,然后在PDMS纤维阵列上面覆盖一层125µm厚的PDMS薄膜,该结构的粘附性能和没有PDMS薄膜的纤维阵列相比有明显的提高.目前仿生粘附实验研究主要将粘附纤维顶端制备成平压头或圆压头[12-19],尽管这种结构在很大程度上增强了粘附性能,但却无法像壁虎那样主动控制粘附和脱黏状态,一旦粘附则很难脱黏.原因主要是壁虎最小粘附单元真实的形状类似于铲状纤维,是一种撕脱而不是拉脱行为.铲状纤维的撕脱行为对壁虎可逆粘附的实现非常重要.Pesika等[20]通过实验研究了无限长薄膜撕脱行为,发现撕脱区(peel zone)的尺寸受撕脱角的影响,在测量撕脱力随撕脱角度的变化规律时,发现存在一个临界撕脱角θ0,当撕脱角θ大于θ0时,撕脱区的形状和尺寸保持不变,此时法向分量的粘附力也保持不变;当撕脱角θ小于θ0时,撕脱区的形状和尺寸随着撕脱角的变化而变化 (图 3(a)所示).将这种模型应用分析壁虎的粘附,预测到当撕脱角为18.4°时薄膜的粘附力与实验测量的真实壁虎铲状绒毛粘附力大小一致.Qu等[21]利用化学气相沉积法,在硅基底上生长出竖直排列的多壁碳纳米管阵列,并研究了其粘附性能.碳纳米管由竖直部分及端部的弯曲部分组成,分别用来仿生壁虎脚部刚毛和铲状绒毛.当碳纳米管阵列与基底接触时,弯曲部分与基底表面的线接触有效地增大了接触面积,并且在切向力的作用下,取向基本一致 (图 4(d)和 4(e)),类似于壁虎铲状绒毛与基底的接触.为了测量该结构粘附力,取4 mm×4 mm大小的碳纳米管集簇与玻璃基底接触(图4(a)示),碳纳米管的直径约为10∼15 nm,长度约为150µm,密度约为 1010∼1011cm−2.该样品能牢牢吊起一本重为1.480 kg的书,切向粘附力约为90.7 N·cm−2,达到壁虎粘附力的10倍;而法向粘附力随着碳纳米管的长度的变化由10 N仅增大到20 N且远小于切向粘附力,并且总粘附力随着拉脱角的变化而变化.图2 (a)单根刚毛和微机电系统的悬臂接触;(b)受15µN预压力时的单根刚毛与表面接触时的最大切向力随时间的变化.[3];(c)实验测量单根铲状绒毛粘附力的示意图;(d)铲状绒毛典型的力—位移曲线[11]图3 (a)撕脱区示意图;(b)薄膜在90°撕脱角时的撕脱区图像;(c)撕脱力随撕脱角变化的实验和理论结果对比[20]图4 (a)重量为1.480 kg书被表面生长有竖直分布的多壁碳纳米管的硅片吊起;(b)和(c)不同放大倍数下的碳纳米管阵列的扫描电镜图;(d)碳纳米管阵列粘附在玻璃表面上;(e)切向力使碳管阵列与基底接触部分变得有序[21]美国麻省理工学院Mahdavi等[22]受壁虎粘附的启发,利用生物相容和生物可降解材料制备了一种仿生医用绷带,如图 5所示.实验表明这种绷带即使在动物新鲜肠壁上的粘附力也能达到4.8 N·cm−2.为了进一步验证绷带粘附性能的可靠性,将绷带黏贴于活的小白鼠腹部,其粘附力仍能达到0.8 N·cm−2.研究者们希望这种医用绷带将来能够在伤口急救和外科手术中作为一种特殊的缝合线使用,使用非常方便,可大大减少救治的步骤,但目前该研究尚处在实验室阶段,要想在医学上广泛应用还需要克服很多难题,因为它的粘附力还达不到临床上使用的要求,这有待进一步研究.图5 受壁虎启发的医用绷带[22]3 仿生薄膜撕脱的理论模型为了揭示壁虎微观粘附机制,已经发展了多个仿生薄膜撕脱的理论模型 [2,23-24],模拟壁虎最小粘附单元的撕脱行为.其中,经典的Kendall模型引起了科研者的进一步关注.Kendall[23]从能量平衡角度得到了无限长弹性薄膜从刚性基底上撕脱时,撕脱力与撕脱角的变化关系其中,P为撕脱力,θ为撕脱角,Δγ为粘附能,E是薄膜的弹性模量,b和h分别为薄膜的宽度和厚度.由于壁虎最小粘附纤维类似于有限尺寸的薄膜,Chen等 [25]用Kendall模型分析了壁虎铲状纤维从基底上撕脱过程,粘附力随撕脱角的增大而减小,撕脱角为0°时粘附力最大;而当撕脱角为90°时粘附力达到最小,因此,该模型能在一定程度上从微观角度揭示壁虎可逆粘附行为.Pesika等[20]提出了一个以撕脱区为特征的薄膜撕脱理论模型,该模型在Kendall模型的基础上增加了一个依赖撕脱角的乘子,分析了撕脱区的尺寸和形状随撕脱角的变化,并用相应的实验验证了该理论(图3(b)和3(c)).Chen等[26]分析了预拉力对薄膜粘附行为的影响,发现当撕脱角较小时薄膜内的预拉力能增强其粘附力;当撕脱角较大时,预拉力的存在可减弱粘附力,并且存在一个临界预拉力使薄膜与基底自发脱黏.Varenberg等 [27]分析了薄膜撕脱的接触细化模型,将一个大尺度薄膜分成多个自相似小尺度薄膜,每一个小薄膜的粘附力可通过Kendall模型得到,总粘附力为所有小薄膜粘附力的总和(图6示).图6 薄膜接触的细化模型[27]图7 法向粘附力FvdW、切向粘附力Ff、总粘附力F(θ)以及最大摩擦力随撕脱角的变化关系[2]图8 (a)有限尺寸薄膜撕脱模型;(b)在不同撕脱角下,撕脱力随着粘附长度的变化关系;(c)撕脱角对总撕脱力以及法向和切向分量粘附力的影响.[24]Kendall模型主要用于分析无限长薄膜与基底的撕脱行为,而壁虎的铲状粘附纤维更类似于有限长尺寸的薄膜.Tian等 [2]提出一种摩擦粘附撕脱模型,利用力平衡条件,求解了有限尺寸薄膜的撕脱力与撕脱角的关系 (图 7示),但在该模型中直接运用了实验中测量得到的壁虎铲状纤维的真实长度尺寸,并未考虑薄膜粘附长度对粘附力的影响.且由图 7知,当撕脱角趋于0°时,该模型预测的粘附力趋于无穷大,和壁虎真实粘附情况不符.Chen等[24]用数值和理论方法分别建立了有限尺寸薄膜的粘附撕脱模型,分析了薄膜的有限粘附尺寸对纳米薄膜撕脱力的影响 (图8(a)).图 8(b)给出了撕脱角分别为0°,30°,90°时,撕脱力与粘附长度的关系.当撕脱角一定时,撕脱力先随粘附长度的增加而增大,当粘附长度达到一定的临界值时,撕脱力趋于一个稳定值,且粘附长度的临界值随撕脱角的增大而减小.当撕脱角为0°时,撕脱力达到最大时,对应的粘附长度临界值为 25 nm左右,该值远小于壁虎铲状绒毛的真实尺寸 (约200 nm).可见,壁虎铲状纤维不仅能适应各种表面而且始终能保证粘附力最大.撕脱角对撕脱力的影响如图 8(c)所示,随着撕脱角的增大,撕脱力逐渐减小,切向力由最大值逐渐减小到零,法向力由零逐渐趋于一个近似的常数值.当撕脱角较小时,撕脱力主要由切向力贡献,当撕脱角较大时撕脱力主要由法向力贡献,与Tian等[2]理论分析一致.这两种极限情况分别对应于壁虎停留在垂直墙壁(0°)和天花板(90°)的情况,可以解释壁虎更多的时间停留倾斜墙壁而非天花板上的缘故[2].4 表面粗糙度对铲状纤维粘附的影响自然界中不存在绝对光滑的表面,任何表面都存在不同程度的粗糙度,表面粗糙度对界面粘附性能有重要的影响[28−36]. Persson 和Tasatti[30],Persson和Gorb[31]以及Palasantzas和De Hosson[32-33]研究了任意表面粗糙度对无线长薄膜粘附行为的影响.当弹性薄膜和粗糙基底接触时,总能量包含了两部分:薄膜内的弹性能Uel和界面能ΔγA,他们引入一个等效界面能表示薄膜与粗糙基底的粘附能力,ΔγeffA0=ΔγA−Uel,A0是表观接触面积,A是实际接触面积,Δγ表示薄膜与光滑平表面之间的粘附能.当界面能ΔγA大于薄膜内的弯曲弹性能 Uel时,弹性薄膜能自发地发生弯曲变形与粗糙基底接触.对于无限长薄膜与粗糙基底接触,总粘附力随着粗糙度的增加呈现单调减小或者先增加后减小的趋势[30-32]. 而 Huber等[37]测量了壁虎单根铲状绒毛和活体壁虎在不同粗糙基底上的粘附力,发现壁虎粘附力随着粗糙度的增加呈现先减小后增大的趋势,当基底粗糙度功率普 (RMS)在100∼300 nm时,粘附力显著降低 (图 9示),该尺寸与壁虎铲状纤维的尺寸相近.此外,Gorb[38]和 Peressadko和Gorb[39]分别测量了甲虫和苍蝇在不同粗糙基底上的粘附力,同样发现一定范围的表面粗糙度 (RMS 0.3∼ 1µm)可降低粘附力. 因此,无限长薄膜与粗糙基底接触的理论模型无法解释实验中发现的表面粗糙度使壁虎等生物粘附力减小的现象.Peng和 Chen[40]建立了有限长度的弹性薄膜与粗糙基底完全接触的二维理论模型.基底粗糙度不失一般性地用余弦函数表示,y=a−a coskx,a为粗糙度的幅值,k=2π/λ为波数,λ为波长.根据薄膜的长度和粗糙度的幅值以及波长的关系,有图 10所示的几种接触形式.图 11表示等效粘附能随着粗糙度的增加而变化的关系.已有结论表明 [40],粘附力随着等效粘附能的增加基本成线性单调增加的关系,因此分析等效粘附能随粗糙度的变化能合理地表示粗糙度对粘附力的影响.当薄膜长度大于粗糙度的波长时,粘附力随着粗糙度的增加单调减小;当薄膜长度小于粗糙度波长时,粘附力随着粗糙度的增加呈现先减小后增加的趋势,这个结论与 Huber等[37]实验现象定性一致.图9 粗糙度对壁虎粘附力影响的实验结果[37]图10 有限尺寸薄膜与正弦分布的粗糙基底接触.(a)薄膜长度b大于粗糙度的波长λ;(b)和(d)薄膜长度b小于粗糙度的波长λ,但粗糙度的振幅增大[40]图11 在不同波长λ时,无量纲的等效粘附能Δγeff/Δγ与粗糙度a/λ的关系[40] 5 环境湿度对仿生薄膜粘附的影响尽管实验证实壁虎的粘附原理主要是分子间的范德华力[1,3],但环境的相对湿度对其粘性能附亦有重要的影响[4-5].Huber等[4]实验发现壁虎粘附力随着相对湿度的增加而增大(图12),并且发现即使相对湿度达到 88%,基底上吸附的水膜厚度也仅为0.2 nm左右,该厚度近似为单分子层厚度的水膜.DelRio等 [41]在研究毛细力引起微机电系统失效时同样发现,即使当相对湿度超过70%时,基底上水膜的厚度也仅仅为一到两层水分子的厚度.Peng和 Chen[42]建立了相应的理论模型,分析了相对湿度和基底上的水滴对有限尺寸的仿生纳米薄膜粘附力的影响.假设当相对湿度小于90%时,基底上吸附单分子厚度的水膜,当薄膜与基底间通过单分子层厚度的水膜接触时,必须考虑水分子与固体表面间的分离压力,分离压力随着水膜厚度的增加而减小,当水膜很薄时,分离压力非常强[43-45].由于水膜仅为单层水分子厚度,该距离仍然在两固体表面范德华力有效作用距离之内.因此,总粘附力由分离压力和两固体表面间的范德华力两部分组成其中,ρ为水膜的覆盖率,与相对湿度相关;D为两固体表面间的距离,A为 Hamaker 常数,b1和b2分别为薄膜的长度和宽度.最终研究发现总粘附力随着相对湿度的增加而增加(图13所示),该结论与相对湿度对壁虎粘附力影响的实验现象定性一致. 图12 相对湿度对壁虎粘附力影响的实验结果[4]图13 相对湿度对薄膜粘附力影响的理论结果[42]当相对湿度大于 90%时,基底上水膜逐渐增厚,最终凝聚成水滴 (如图 14所示).当薄膜与水滴接触时,由于水滴表面张力的作用,薄膜很容易发生弯曲变形将水滴包裹起来 [46-47].由能量平衡可以获得液滴自包裹的条件——弹性毛细长度 [47]即当液滴半径 R大于 REC时,表面力所做的功大于弯曲能,薄膜能将液滴完全包裹 (图15(a));当水滴的半径 R小于 REC时,表面能不足以克服薄膜将水滴完全包裹的弯曲能,因此,薄膜与水滴间将发生半包裹现象 (图 15(a)).对于完全包裹和半包裹两种情况,总粘附力由水滴引起的毛细力和水滴之外的范德华力两部分组成[42].图15(b)和(d)分别表示毛细力、范德华力以及总粘附力随水滴体积的变化规律.结果表明,液滴产生的毛细力表现为斥力,并且其绝对值随液体体积的增大而增大;范德华力随着液滴体积的增大而减小;毛细力和范德华力的共同作用使总粘附力随着液滴体积的增大而逐渐减小,当水滴体积增大到一定值时,总粘附力减小到零.该结论则可以解释动物学家熟知的一个现象:当壁虎停留在墙壁上时,如果往墙壁上喷撒水雾,壁虎便无法粘附在墙壁上[5].图14 基底上水膜逐渐转变为水滴的示意图[42]图15 薄膜通过水滴与基底接触模型及理论分析结果.(a)半包裹和全包裹示意图;(b)和(d)毛细力、范德华力以及总粘附力随水滴体积的变化规律[42]6 仿生纳米薄膜厚度对粘附的影响生物粘附系统经过长期的演化实现了一种自下而上设计的多分级粘附结构,其基本组成单元一般在亚微米或纳米尺度,特别是壁虎粘附系统,其末端最小铲状纤维粘附长度和宽度约为200 nm,厚度约为5 nm,如此精细的结构亦是大自然的最优设计.Gao等 [48]和 Chen等[49]将壁虎绒毛看作柱状纤维分别研究了柱状纤维在拉伸和扭转载荷下的尺寸效应.结果表明,在拉伸载荷下,当柱状纤维的半径减小到约为225 nm时,接触区的应力达到均匀的理论强度分布 (图 16所示),称为缺陷不敏感现象,并且该尺寸与壁虎绒毛尺寸相当;而在扭转载荷下,缺陷不敏感尺寸远小于拉伸载荷作用下的临界尺寸,从而解释了壁虎在拉伸状态的超强粘附和扭转载荷下的轻松脱黏现象.然而,壁虎最小粘附单元的真实形状为铲状纤维而非柱状结构,Peng等[24]从数值模拟的角度分析了有限尺寸薄膜的粘附行为,发现对于薄膜撕脱模型,缺陷不敏感的尺寸随撕脱角的变化而变化,在撕脱角为0°时,临界尺寸最大约为25 nm,并且该临界值随着撕脱角的增大而减小(图8(b)),且远小于柱状纤维的临界尺寸.图16 柱状纤维在拉伸载荷下的尺寸效应[48-49]另一方面,壁虎铲状绒毛厚度约为 5 nm,铲状绒毛的厚度是不是生物经过长期进化的最优选择?Peng和Chen[40]理论分析了有限尺寸薄膜厚度对粘附的影响(图17(a)和17(b)所示).假设两个分子间的作用力用Lennard-Jones势表示其中,ε是势阱的深度,σ是确定平衡位置的参数,r是两原子间的距离.因此,薄膜与基底间的粘附力可通过薄膜和基底内所有分子间作用力的积分得到图17 (a)单个分子与半无限基底接触;(b)厚度为h的薄膜与半无限基底接触;(c)粘附力随薄膜厚度的变化关系[40]其中,D为薄膜与基底间的距离,h为薄膜的厚度,A为薄膜的横截面积,ρ1和ρ2分别为薄膜和基底内的分子密度.图17(c)表示粘附力随薄膜厚度的变化关系,结果表明,当粘附力达到最大值时,薄膜厚度约为5 nm,该尺寸与壁虎铲状绒毛的厚度尺寸一致.另外,壁虎绒毛还必须有足够的强度来够承受其体重,壁虎典型的体重约为几十克,如果我们假设壁虎体重上限为100 g,脚掌上所有绒毛均匀承受体重,考虑到壁虎脚掌上铲状绒毛的数量和几何尺寸,壁虎一只脚承受其体重所需绒毛的最小厚度为2.5 nm.因此,壁虎铲状绒毛 5 nm的厚度,不仅有足够的强度承受其体重,而且能保证粘附力达到最大值,亦能保证与粗糙表面间的粘附力[40].7 结论与展望生物在长期的生命演化与协作过程中形成的卓有成效的能力为人类社会的发展提供了许多灵感,人类可以在生物和大自然中寻找、学习和模仿,从中找出解决目前人类科技发展所面临的诸多问题的方法.正因为如此,生物力学和仿生力学在国际上得到迅速的发展.对生物粘附的研究随着近年来科技的发展,特别是纳米科技、纳米制造技术的日趋成熟,人工仿生生物粘附系统的结构越来越精细,粘附效果也越来越强.国内外很多学者分析比较了不同粘附纤维形状对粘附力的影响 [50-54],发现具有薄膜。
基于无人机LiDAR仿地飞行技术的高陡边坡危岩体快速识别方法

第42卷 第6期2023年 11月 地质科技通报B u l l e t i n o f G e o l o g i c a l S c i e n c e a n d T e c h n o l o g yV o l .42 N o .6N o v . 2023庞鑫,袁明,卢渊,等.基于无人机L i D A R 仿地飞行技术的高陡边坡危岩体快速识别方法[J ].地质科技通报,2023,42(6):21-30.P a n g X i n ,Y u a n M i n g ,L u Y u a n ,e t a l .R a p i d i d e n t i f i c a t i o n m e t h o d f o r t h e d a n g e r o u s r o c k m a s s o f a h i g h -s t e e p s l o pe b a s e d o n U A V L i D A R a n d g r o u n d i m i t a t i o nf l igh t [J ].B u l l e ti n o f G e o l o g i c a l S c i e n c e a n d T e c h n o l o g y,2023,42(6):21-30.基于无人机L i D A R 仿地飞行技术的基金项目:国家自然科学基金项目(52179117);湖北-国家自然科学联合基金项目(U 21A 20159)作者简介:庞 鑫(1982 ),男,高级工程师,主要从事非煤露天矿山边坡地质灾害治理等方面的研究工作㊂E -m a i l :36754555@q q.c o m 通信作者:付晓东(1986 ),男,副研究员,主要从事边坡地质灾害数值模拟与评估等方面的研究工作㊂E -m a i l :x d f u @w h r s m.a c .c n丁海锋(1997 ),男,现正攻读土木水利专业硕士学位,主要从事边坡稳定性分析与灾变机制方面的研究工作㊂E -m a i l:d i n g h a i f e n g21@m a i l s .u c a s .a c .c n ©E d i t o r i a l O f f i c e o f B u l l e t i n o f G e o l o g i c a l S c i e n c e a n d T e c h n o l o g y .T h i s i s a n o pe n a c c e s s a r t i c l e u n d e r t h e C C B Y -N C -N D l i c e n s e .高陡边坡危岩体快速识别方法庞 鑫1,袁 明2,卢 渊3,杜文杰4,5,万道春1,李 得1,丁海锋4,5,付晓东4,5(1.攀钢集团矿业有限公司,四川攀枝花617000;2.四川电力设计咨询有限责任公司,成都610000;3.中国电力科学研究院有限公司输变电工程研究所,北京102401;4.中国科学院武汉岩土力学研究所岩土力学与工程国家重点实验室,武汉430071;5.中国科学院大学,北京100049)摘 要:我国西南地区山高谷深㊁斜坡高陡,危岩落石灾害极为发育,高陡边坡危岩落石由于高差大㊁坡面陡,具有显著的突发性,因此快速㊁准确㊁便捷地解译与识别危岩体源头成为高陡岩质边坡风险分析的首要问题㊂当前探测手段的进步使基于影像的地质灾害解译逐步从目视识别向人机交互式识别方向发展㊂其中,无人机激光雷达(L i D A R )系统通过融合无人机载体与L i D A R 测量技术的优势,广泛应用于地质灾害调查中,同时仿地飞行技术的引入可以使无人机L i D A R 系统适应复杂的地形,快速获取高精度㊁高密度的点云数据㊂基于以上技术对攀枝花某铁矿露天采场东侧边坡开展了无人机调查,通过获取高精度D OM 影像和三维点云模型,量化提取点云模型中露头坡面粗糙度㊁倾向等危岩体几何特征参数作为D OM 影像的补充材料,提出了一套基于D OM 影像和几何特征的危岩体人机交互式识别方法㊂通过对东侧边坡危岩体的应用表明:提出的人机交互式识别方法通过在D OM 影像的基础上叠加露头坡面几何特征,对悬空危岩体的识别精度优于目视识别,可以显著提高危岩体识别的效率和准确性㊂提出的方法通过结合创新的遥感技术,为高陡岩质边坡危岩体识别提供了快速便捷的方案㊂关键词:高陡边坡;危岩体;无人机L i D A R 系统;仿地飞行;三维点云模型2022-08-06收稿;2022-09-28修回;2022-10-03接受中图分类号:P 23;P 642.2;T N 958.98 文章编号:2096-8523(2023)06-0021-10d o i :10.19509/j .c n k i .d z k q.t b 20220427 开放科学(资源服务)标识码(O S I D ):R a p i d i d e n t i f i c a t i o n m e t h o d f o r t h e d a n g e r o u s r o c k m a s s o f a h i g h -s t e e ps l o p e b a s e d o n U A V L i D A R a n d g r o u n d i m i t a t i o n f l i gh t P a n g X i n 1,Y u a n M i n g 2,L u Y u a n 3,D u W e n ji e 4,5,W a n D a o c h u n 1,L i D e 1,D i n g H a i f e n g 4,5,F u X i a o d o n g4,5(1.P a n z h i h u a I r o n a n d S t e e l G r o u p M i n i n g Co .,L t d .,P a n z h i h u a S i c h u a n 617000,C h i n a ;2.S i c h u a n E l e c t r i c P o w e r D e s i g n C o n s u l t i n g C o .,L t d .,C h e n gd u 610000,C h i n a ;3.P o we r T r a n sf o r m e r E ng i n e e r i n g Re s e a r c h I n s t i t u t e ,C h i n a E l e c t r i c P o w e r R e s e a r c h I n s t i t u t e ,B e i j i n g 102401,C h i n a ;4.S t a t e K e y L a b o r a t o r y of G e o m e c h a n i c s a n d G e o t e c h n i c a l E ng i n e e r i n g,h t t p s://d z k j q b.c u g.e d u.c n地质科技通报2023年I n s t i t u t e o f R o c k a n d S o i l M e c h a n i c s,C h i n e s e A c a d e m y o f S c i e n c e s,W u h a n430071,C h i n a;5.U n i v e r s i t y o f C h i n e s e A c a d e m y o f S c i e n c e s,B e i j i n g100049,C h i n a)A b s t r a c t:[O b j e c t i v e]I n S o u t h w e s t C h i n a,r o c k f a l l h a z a r d s a r e e x t r e m e l y d e v e l o p e d i n h i g h m o u n t a i n s a n d d e e p v a l l e y a r e a s w i t h h i g h a n d s t e e p s l o p e s.D u e t o t h e l a r g e e l e v a t i o n d i f f e r e n c e a n d s t e e p s l o p e,t h e d a n-g e r o u s r o c k m a s s o n a h i g h-s t e e p s l o p e h a s r e m a r k a b l e c h a r a c t e r i s t i c s o f s u d d e n n e s s.T h u s,a r a p i d,a c c u-r a t e a n d c o n v e n i e n t i n t e r p r e t a t i o n a n d i d e n t i f i c a t i o n f o r t h e s o u r c e o f d a n g e r o u s r o c k m a s s b e c o m e s t h e p r i-m a r y p r o b l e m o f r i s k a n a l y s i s o f h i g h-s t e e p s l o p e s.A t p r e s e n t,t h e p r o g r e s s o f d e t e c t i o n m a k e s i m a g e-b a s e d g e o l o g i c a l h a z a r d i n t e r p r e t a t i o n g r a d u a l l y d e v e l o p f r o m v i s u a l i d e n t i f i c a t i o n t o h u m a n-c o m p u t e r i n-t e r a c t i v e i d e n t i f i c a t i o n.A m o n g t h e m,t h e U A V L i D A R s y s t e m i s w i d e l y u s e d i n g e o l o g i c a l d i s a s t e r i n v e s-t i g a t i o n b y i n t e g r a t i n g b o t h a d v a n t a g e s o f U A V c a r r i e r a n d L i D A R m e a s u r e m e n t t e c h n o l o g y,w h i l e t h e i n-t r o d u c t i o n o f g r o u n d i m i t a t i o n f l i g h t t e c h n o l o g y c a n m a k e t h e U A V L i D A R s y s t e m a d a p t t o c o m p l e x t e r-r a i n,o b t a i n i n g h i g h-p r e c i s i o n a n d h i g h-d e n s i t y p o i n t c l o u d d a t a.[M e t h o d s]O n t h i s b a s i s,a U A V s u r v e y w a s c a r r i e d o u t o n t h e E a s t s i d e s l o p e o f o p e n-p i t m i n e,a n d a h i g h-p r e c i s i o n D OM i m a g e a n d3D p o i n t c l o u d m o d e l w e r e o b t a i n e d b y p r o c e s s i n g t h e U A V s u r v e y d a t a.A s t h e s u p p l e m e n t a r y m a t e r i a l s o f t h e D OM i m a g e,t h e g e o m e t r i c f e a t u r e p a r a m e t e r s o f o u t c r o p,i n c l u d i n g s u r f a c e r o u g h n e s s a n d d i p,a r e q u a n-t i t a t i v e l y e x t r a c t e d f r o m t h e p o i n t c l o u d m o d e l.O n t h i s b a s i s,a s e t o f h u m a n-c o m p u t e r i n t e r a c t i v e i d e n t i-f i c a t i o n f o r d a n g e r o u s r o c k m a s s e s b a s e d o n D OM i m a g e s a n d g e o m e t r i c f e a t u r e s i s p r o p o s e d.[R e s u l t s] T h e a p p l i c a t i o n t o t h e E a s t s i d e s l o p e o f o p e n-p i t m i n e s h o w s t h a t b y s u p e r i m p o s i n g o u t c r o p s l o p e g e o m e t-r i c f e a t u r e s b a s e d o n D OM i m a g e s,t h e p r o p o s e d h u m a n-c o m p u t e r i n t e r a c t i v e i d e n t i f i c a t i o n m e t h o d c a n s i g n i f i c a n t l y i m p r o v e t h e e f f i c i e n c y a n d a c c u r a c y o f i d e n t i f i c a t i o n,a n d t h e i d e n t i f i c a t i o n o f o v e r h a n g i n g d a n g e r o u s r o c k m a s s i s m u c h m o r e r o b u s t t h a n v i s u a l o n e s.[C o n c l u s i o n]B y c o m b i n i n g i n n o v a t i v e r e m o t e s e n s i n g t e c h n o l o g i e s,t h e p r o p o s e d m e t h o d p r o v i d e s a f a s t a n d c o n v e n i e n t s o l u t i o n f o r t h e i d e n t i f i c a t i o n o f d a n g e r o u s r o c k m a s s e s o n h i g h a n d s t e e p r o c k y s l o p e s.K e y w o r d s:h i g h-s t e e p s l o p e;d a n g e r o u s r o c k m a s s;U A V L i D A R s y s t e m;g r o u n d i m i t a t i o n f l i g h t;3D p o i n t c l o u d m o d e lR e c e i v e d:2022-08-06;R e v i s e d:2022-09-28;A c c e p t e d:2022-10-03岩质高陡边坡是山区工程建设的主要地质环境和工程承载体,尤其是我国西南地区山高谷深㊁斜坡高陡,危岩落石灾害极为发育㊂作为一类广泛分布的灾害类型,落石由源区启动后沿坡面以随机的轨迹快速移动,其运移过程本身具有高度的不确定性,因此快速㊁准确识别危岩落石源头区域,确定其规模和影响范围并进行及时有效的处置对于矿山㊁交通㊁水利等大型工程建设的安全具有重要意义㊂无论采用何种方法评估危岩落石灾害(定性和定量)都需要关键剖面㊁材料特性㊁几何特征以及结构面特性的数据[1]㊂在过去几十年中,局限于地质调查条件,用于落石灾害和风险评估的数据大多通过传统的现场勘测和基于经验假设获取㊂危岩体快速识别的困难和复杂性源于高精度数据的高效获取和危岩体空间形态的量化困难㊁危岩体自身的隐蔽性和视觉解释能力有限[2-5]㊂随着无人机㊁激光雷达与图像处理技术的发展,无人机遥感技术已成为传统勘测手段的有力补充,可为灾害隐患排查提供多源数据信息,如图1所示㊂其中,基于无人机获取的影像信息和三维重建技术(s t r u c t u r e f r o m m o t i o n,简称S F M)生成数字正射影像(d i g t i t a l o r t h o p h o t o m a p,简称D OM),通过目视识别危岩体并提取危岩体发育特征是一项重要应用㊂然而,无人机作业时的天气㊁光照㊁角度等因素会降低D OM的质量,同时解译者主观判断上的偏差都会影响目视识别的准确性㊂作为一种主动式测绘技术,无人机激光雷达(L i D A R)技术不仅能够在短时间内高效获取并生成高精度模型,而且成图质量不受上述条件的制约,能够反映更精细的地表特征[6-9]㊂通过无人机搭载激光雷达系统,融合了无人机载体和三维激光雷达技术各自的优势,为地质灾害解译和风险评估提供了高精度数据支撑㊂无人机机动灵活㊁实时性强㊁可重复的优势结合L i D A R精度高㊁穿透性强的特点,在此基础上引入仿地飞行技术,弥补了常规扫描方式采样点有限㊁覆盖范围小㊁局部采集不到位的不足,可以实现对高陡边坡的全方位㊁多角度探测㊂无人机L i D A R系统支持以点22第6期 庞 鑫等:基于无人机L i D A R仿地飞行技术的高陡边坡危岩体快速识别方法图1 无人机遥感技术与传统地质勘察手段的结合F i g .1 C o m b i n a t i o n o f U A V r e m o t e s e n s i n g t e c h n o l o g ya n d t r a d i t i o n a l g e o l o g i c a l s u r v e y云的形式生成地质灾害风险区域的高分辨率㊁高精度三维模型,在此基础上通过手动或半自动方法识别结构面㊁凹腔㊁裂缝等危岩体典型特征[10-18],并从中提取精确的危岩体空间信息[19-26]㊂将无人机载L i D A R 和倾斜摄影技术相结合应用,可形成技术优势互补,有效提高数据的丰富性㊁真实性,能够快速获取地质灾害隐患点高分辨率㊁高精度的地貌影像和真实地表地形数据[27-28]㊂这也促使地质灾害解译逐步从目视识别向人机交互式识别方向发展㊂笔者拟基于无人机L i D A R 系统,通过引入仿地飞行技术实现岩质边坡空间信息高精度获取,在此基础上提取露头坡面岩体几何特征作为D O M 的补充材料辅助进行人机交互式危岩体识别㊂通过融合一系列新技术㊁新方法,可有效弥补当前地质灾害目视识别的不足,提高解译工作的效率和准确性㊂1 无人机L i D A R 系统的仿地飞行技术1.1无人机L i D A R 系统无人机L i D A R 系统充分发挥无人机载体和高性能三维激光移动测量技术的优势,可生成数字高程模型(d i gi t a l e l e v a t i o n m o d e l ,简称D E M )㊁数字表面模型(d i gi t a l s u r f a c e m o d e l ,简称D S M )和三维点云模型㊂其优势有:L i D A R 技术作为一种主动式测绘手段,不受天气㊁光照等条件制约,能在短时间内获取并处理大区域㊁大范围的地表空间信息,工作效率较高,同时保证作业的安全㊂此外,无人机L i -D A R 系统能够快速获取大范围区域的地面目标的空间坐标,获取的坐标具有较高的精度,并通过强度㊁回波次数等信息对探测目标进行识别和分类㊂同时,激光脉冲信号对植被具有一定的穿透能力,可以很大程度上减少植被枝叶遮挡等造成的信息损失,获取森林植被覆盖区域的真实地表数据㊂表1中对比了3类探测手段,对于较大区域的地质灾害㊁工程场地探测方面的应用,无人机激光雷达系统无论是在精度还是效率上都具有一定的优势㊂表1 3类探测手段的对比T a b l e 1 C o m p a r i s o n o f t h r e e d e t e c t i o n a p pr o a c h s 探测技术精度速度成本应用范围U A V 激光雷达非常高/c m很快高大范围/102k m2U A V 摄影测量较高/c m~m 较快较高较大范围/10k m2遥感卫星低很快较高全球范围1.2仿地飞行需要指出的是,无人机L i D A R 技术并非对所有工程场景都具有良好的效果:当L i D A R 激光几乎平行于不连续面时会导致方向产生偏差;当岩石表面的部分因凸出表面对L i D A R 激光的遮挡时会导致在点云数据中留下间隙㊂相比平飞,无人机仿地飞行可以适应更加复杂的地形,而且也有助于提高无人机飞行安全㊂仿地飞行是指无人机依据飞行区的地面起伏而始终保持在恒定的相对高度上飞行,在飞行作业中,通过已有三维地表数据D S M ,使无人机保持与地面目标的高度不变㊂仿地飞行具有以下优势:根据地形高低起伏自主调整飞行高度,对凸出表面遮挡区域进行多角度扫描;通过保持与地面的固定飞行高度,克服地形高差大和突出表面遮挡的问题,如图2所示,保证复杂地形条件下点云数据密度和数据分辨率的一致性[29],可以反映更精细的地表起伏和局部的微地形㊂图2 仿地飞行示意图F i g .2 S k e t c h m a p o f t h e g r o u n d i m i t a t i o n f l i gh t 本研究的技术流程如图3所示:首先针对高陡边坡研究区域,划定飞行区域,基于区域D S M 规划仿地飞行航线;架设地面基站并连接飞行器;无人机执行航线任务获取原始数据,后将数据进行三维点32h t t p s ://d z k j q b .c u g.e d u .c n 地质科技通报2023年云模型解算;对点云模型进行滤波处理,提取空间信息与几何特征并对危岩体和潜在灾害进行识别㊂图3 技术路线图F i g .3 T e c h n i c a l r o u t e o f t h e s t u d y2 典型露天矿山高陡边坡模型获取2.1研究区域如图4-a 所示,攀枝花某铁矿露天采场位于川滇南北构造带中段西侧与滇㊁藏 歹 字型构造的复合部位,区域内构造复杂,褶皱㊁断裂发育,以南北向及东北向构造为主㊂采场东侧研究区域地层岩性相对较为简单,开挖出露岩体主要为辉长岩和铁矿体,最深处高差达到348m ,整体边倾角56ʎ,台阶角达到70ʎ,属于典型的岩质高陡边坡,持续的爆破扰动下,露头坡面岩体破碎程度较高,节理裂缝发育㊂研究区域控制性断层F 106为一条近南北向的平移逆断层,爆破扩帮施工后,断层出露于坡面拐角处,如图4-b ,c 所示㊂2021年12月17日,采场东侧断层出露位置发生局部岩质崩塌,随后诱发地表风化层失稳㊂崩塌发生前,某铁矿露天采场东侧在进行扩帮施工㊂结合地质资料与无人机调查结果,如图4-d ,e 所示,确定采场东侧边坡失稳的主要诱发因素有3个:持续的爆破扰动;台阶与控制性断层斜交;扩帮后台阶拐角位置存在应力集中㊂崩塌发生后,爆破作业导致不断有小型垮塌发生,采场东侧边坡不断有落石和流土向下堆积㊂未来在爆破扰动的持续影响下,采场东侧边坡稳定性a .四川地形图及研究区域位置;b .F 106断层;c .失稳前研究区域D OM ;d .破坏前影像;e .破坏后影像图4 研究现场的总体情况F i g .4 O v e r a l l s i t u a t i o n o f t h e s t u d y si t e 依然较差㊂因此,亟需对采场东侧边坡危岩落石灾害开展进一步调查㊂2.2点云数据获取与解算鉴于采场东侧边坡仍有危岩落石的风险,通过D J I M 300R T K 搭载A l ph a A i r 450L i D A R 对采场东侧边坡失稳区域进行了高精度三维激光扫描,如图5-a 所示㊂A l ph a A i r 450L i D A R 平面精度达到0.01m ,高程精度达到0.02m ㊂本次航线参数设置如图5-b 所示:仿地飞行高度60m ,设置航向重叠率60%,旁向重叠率50%,飞行速度8m /s,回波次数3回波,采样频率72万点/s㊂将基准站架设在任意点位上,通过网络连接用户单位的连续运行卫星定位服务综合系统(c o n t i n u o u s o pe r a t i o n a l r ef e r -e n c e s ys t e m ,简称C O R S ),采集基站准确坐标,飞机具备R T K /P P K 融合差分作业模式,可获取高精度定位定资系统(p o s i t i o n a n d o r i e n t a t i o n s y s t e m ,简称P O S)数据㊂在确定L i D A R 系统的位置和方位后即可确定激光光斑的三维位置㊂在此基础上,通过获取激光测距系统到测量目标的距离以及系统姿态参数等信息,解算得出采场东侧边坡的三维点云[30]㊂相较无人机倾斜摄影技术,通过无人机搭载激光雷达可以42第6期 庞 鑫等:基于无人机L i D A R 仿地飞行技术的高陡边坡危岩体快速识别方法更快获取三维模型数据,为后续工作的开展节约了大量时间成本㊂a .D J I M 300R T K 搭载A l ph a A i r 450L i D A R ;b .仿地飞行航线图5 无人机设备与仿地航线规划F i g .5 U A V e q u i p m e n t a n d r o u t e p l a n n i n g o f gr o u n d i m i t a t i o n f l i gh t 3 危岩体快速识别方法3.1布料 模拟滤波采场东侧边坡坡顶地表植被茂密,需要对原始点云数据进行滤波处理,将地面点与非地面点进行分离㊂针对采场东侧边坡陡倾的特点,采用 布料模拟滤波算法(c l o t h s i m u l a t i o n f i l t e r ,简称C S F )[31]进行了地面点与非地面点的过滤与分离㊂滤波作为点云处理的第一步,对于后续几何特征提取的准确性至关重要㊂C S F 方法首先将三维点云倒置,然后通过模拟布料覆盖倒置后的点云,基于 布料 曲面的位置生成近似的地表形状,最后对比原始点云数据中的点和生成的 布料 曲面之间的距离,从而由原始点云数据中识别地面点(图6中蓝色点)并分离非地面点(图6中绿色点),滤波参数见表2㊂表2 C S F 参数T a b l e 2 C S F p a r a m e t e r s参数分辨率/m 最大迭代步分类阈值数值0.25000.2孤立的树木和稀疏的植被通常很容易通过应用自动滤波算法以及手动细化去除㊂然而,C S F方法图6 基于C S F 方法的地面点和非地面点分离F i g .6 S e p a r a t i o n o f g r o u n d a n d o f f -gr o u n d p o i n t s b a s e d o n C S F对于较陡的边坡进行滤波时会出现偏差,误将较陡的坡表识别为非地面点(植被),移除这部分非地面点会导致原始3D 点云中出现大量孔洞㊂因此需要对滤波参数进行反复尝试以得到较好的滤波效果㊂3.2危岩体空间信息提取与初步识别如图7所示,通过D OM 和三维点云的透视投影,可以对潜在落石灾害的规模做初步识别与判断㊂经过对比无人机拍摄的图像,基于D OM 和三维点云的透视投影可以识别部分特征明显的危岩体㊂危岩体#Ⅰ后壁与母岩分离,形成较宽的后壁缝隙,危岩体底部出现裂隙但未见压裂破碎状,在爆破扰动下强风化层流土向后壁裂缝内填充,危岩体有发生倾倒破坏的可能㊂危岩体#Ⅱ与#Ⅲ呈不规则块状,下部临空形成凹腔,在持续外营力作用下,有沿后缘裂隙破坏坠落的可能㊂图8通过三维点云模型剖面分析提取了危岩体的尺寸信息:根据图8-a ,c 剖面得到#Ⅰ号危岩体后壁裂缝深度被上方流土填充至1.9m ,危岩体后壁与母岩间的宽度为1.12m ,#Ⅰ号危岩体整体高度12.4m ,横向宽度18.9m ㊂由图8-b ,c 剖面图可知,#Ⅱ号危岩体整体高度6.8m ,凹腔深度3.1m ,横向宽度27.9m ㊂基于D OM 确定了岩质边坡露头坡面危岩体分布较为密集,划定露头位置作为研究区域,如图9所示,提取典型几何特征,包括结构面产状㊁表面粗糙度指数和倾向㊂3.3危岩体关键几何特征参数获取(1)结构面产状 从岩质边坡典型破坏类型来看,结构面特征及其组合关系对岩体稳定性往往起控制性作用㊂滤波后的地面点云通过D S E 软件[32]半自动识别其中的不连续结构面并进行聚类,以识别具有相同结构面特征的点簇,确定了J 1㊁J 2㊁J 3和J 4结构面点簇,每个点簇按聚类的结构面着色,如图10所示㊂倾角和倾向的结果以及每组结构面的占比如表3所示㊂占比最大的点簇J 1代表整体坡面52h t t p s ://d z k j q b .c u g.e d u .c n 地质科技通报2023年a .D OM (正视图);b .D OM (侧视图);c .三维点云透视投影(正视图);d .三维点云透视投影(侧视图)图7 基于D OM 和点云透视投影的危岩体初步识别F i g .7 P r e l i m i n a r y r e c o g n i t i o n o f d a n g e r o u s r o c k m a s s e s b a s e d o n D OM a n d p e r s p e c t i v e p r o je c t i o n of p o i n t c l o u d m o d el 图8 剖面分析F i g .8 P r o f i l e a n a l ys i s 面的方位,而其他点簇的占比相对较低,说明采场东侧边坡岩体的结构效应并不明显㊂(2)表面粗糙度指数 危岩体多突出于坡面,突出岩体大多呈不规则形状且边缘不平整[33],通过引入表面粗糙度指数来反映露头坡面的不平整特性[34]㊂根据这一特点,在高分辨率3D 点云中,可以表3 4组结构面产状信息T a b l e 3 F o u r s e t s o f d i s c o n t i n u i t i e s a n d t h e i r c h a r a c t e r i s t i c s点簇倾向/(ʎ)倾角/(ʎ)密度/(个㊃c m -3)产状点云占比/%J 1208.384338.73413.289868.46J 2358.556088.60010.12117.94J 310.107586.61470.12047.38J 4340.624386.04410.09596.1562第6期 庞 鑫等:基于无人机L i D A R仿地飞行技术的高陡边坡危岩体快速识别方法图9 采场东侧边坡露头研究区域F i g .9 S t u d y a r e a o f s l o p e o u t c r o p o n E a s t s i d e o f s t o pe 通过露头坡面的表面粗糙度来识别危岩体,危岩体局部往往具有更高的表面粗糙度,因此表面粗糙度的分布可以用于直接反映危岩体边缘[35],如图11所示㊂表面粗糙度指数即点云高程标准偏差,在以当前点i 为圆心,半径为1.0m 的采样窗口内计算点i 的表面粗糙度γ㊂计算公式为:γ=ð(z -z ')2n -1(1)式中:z 为采样点高程;z '为采样窗口内所有点的平均高程;n 为采样窗口中的点数㊂(3)倾向 受到天气㊁光照㊁拍摄角度等条件的影响,通过目视识别难以直接从D OM 中确定悬空位置㊂倾向是边(滑)坡分析中最重要的参数,对岩质边坡而言,一定的倾向区间可以直观反映出部分悬空岩块的位置㊂通过式(1)计算点云中每个点的倾向θ,基于主成分分析法(p r i n c i p a l c o m p o n e n t a n a l ys i s ,简称P C A )的特征值比率,检测表面粗糙度指数,提取危岩体的地貌特征,并基于3D 点云提取局部邻域中倾向的变化㊂|θ|=t a n -1N 2x +N 2y N z ㊃180π(2)式中:N x ,N y ,N z 为平面法向量分量㊂基于露头坡面三维点云模型计算得到的倾向如图12所示,由3个视角对点云模型倾向场的观察发现,通过提取-60ʎ~60ʎ倾向区间可以直观地反映图10 结构面点簇分布F i g.10 P o i n t c l u s t e r d i s t r i b u t i o n o f s t r u c t u r a l p l a n e 图11 表面粗糙度指数提取F i g .11 E x t r a c t i o n o f t h e s u r f a c e r o u gh n e s s i n d e x 72h t t p s ://d z k j q b .c u g.e d u .c n 地质科技通报2023年图12 露头坡面倾向F i g .12 D i p o f t h e o u t c r op图13 突出岩体悬空面提取(倾向)F i g .13 E x t r a c t i o n o f t h e s u s pe n d e d s u rf a c e o f t h e o u t b u r s t r o c k m a s s 悬空岩体的位置和规模,如图13所示㊂3.4人机交互式危岩体识别方法对于突出于坡面且规模不一的悬空危岩体,仅通过D OM 的目视识别很难加以判断㊂在D OM 的基础上,通过引入表面粗糙度指数和倾向等反映危岩体几何特征的参数,对悬空危岩体进行人机交互式识别:危岩体#Ⅱ后缘脱离母岩后形成陡坎,通过D O M 的目视识别即可进行判断,如图7-a 所示;对于形状不规则且下部临空形成凹腔的危岩体群#Ⅰ,仅通过D O M 很难进行识别,需要结合表面粗糙度指数和倾向等反映危岩体几何特征的参数加以判断,如图14黑色虚线区域所示,将局部粗糙度突变且相邻区域存在悬空面的初步识别为悬空危岩体,悬空危岩体的展布方向与F 106断层面接近平行㊂通过对照无人机拍摄的各时段露头照片(部分照片可以通过阴影识别孤立岩体),基于本文方法识别的危岩体可以很好地反映实际露头坡面危岩体的情况㊂通过获取岩质边坡的坡面D OM 和基于点云模型的关键几何特征参数,我们提出了基于多源数据融合的人机交互式危岩体识别方法,人机交互式识别方法中 人 是指基于高分辨率D OM 的目视识别; 机 是指基于高精度三维点云数据,提取点关键几何特征参数,辅助快速定位危岩体隐患点㊂对于局部粗糙度突变且相邻区域存在悬空面,识别为悬空危岩体,如图14黑色虚线围起的区域;对于存在连成面的呈狭长分布的突变粗糙度区域,识别为倾倒型危岩体的后壁陡坎(裂缝),如图14红色虚线围起的区域㊂82第6期 庞 鑫等:基于无人机L i D A R仿地飞行技术的高陡边坡危岩体快速识别方法图14 基于D OM 和几何特征参数的人机交互式识别F i g .14 H u m a n -c o m p u t e r i n t e r a c t i v e r e c o g n i t i o n b a s e d o n D OM i m a ge a n d g e o m e t r i cf e a t u r e s 4 结 论(1)持续的爆破作用和台阶拐角处的应力集中是导致采场东侧边坡崩滑灾害的主因㊂(2)无人机搭载激光雷达可以快速获取高陡边坡的三维模型数据,而仿地飞行技术的引入则保证模型可以反映更精细的地表起伏和局部的微地形㊂(3)对岩质边坡而言,通过一定的倾向区间可以直观地反映悬空部分的岩体的位置和规模,这对悬空危岩体的识别至关重要㊂(4)提出了一套基于D OM 和几何特征参数的危岩体人机交互式识别方法,在采场东侧边坡的应用情况表明:在D OM 的基础上,融合露头坡面几何特征参数的人机交互式识别可以弥补目视识别的不足,显著提高危岩体识别工作的效率和准确性㊂(5)采场东侧边坡危岩类型较多:部分突出的岩块悬空,重力的偏心分布加之外营力作用下,突出的岩体有突然崩落的可能;部分岩块与母岩剥离形成垂直后壁缝隙,在自重和层间推力(强风化层流土向后壁裂缝内堆积)作用下容易发生倾倒式破坏㊂(所有作者声明不存在利益冲突)参考文献:[1] D e B i a g i V ,N a po l i M L ,B a r b e r o M ,e t a l .E s t i m a t i o n o f t h e r e -t u r n p e r i o d o f r o c k f a l l b l o c k s a c c o r d i n g to t h e i r s i z e [J ].N a t u -r a l H a z a r d s a n d E a r t h S ys t e m S c i e n c e s ,2017,17(1):103-113.[2] G l a d e T.L a n d s l i d e o c c u r r e n c e a s a r e s po n s e t o l a n d u s e c h a n g e :A r e v i e w o f e v i d e n c e f r o m N e w Z e a l a n d [J ].C a t e n a ,2003,51(3/4):297-314.[3] C r o s t a G B ,A g l i a r d i F .P a r a m e t r i c e v a l u a t i o n o f 3D d i s pe r s i o n of r o c k f a l l t r a j e c t o r i e s [J ].N a t u r a l H a z a r d s a n d E a r t h S ys t e m S c i e n c e s ,2004,4(4):583-598.[4] M i c h o u d C ,D e r r o n M H ,H o r t o n P ,e t a l .R o c k f a l l h a z a r d a n dr i s k a s s e s s m e n t s a l o n g r o a d s a t a r e g i o n a l s c a l e :E x a m pl e i n S w i s s A l p s [J ].N a t u r a l H a z a r d s a n d E a r t h S y s t e m S c i e n c e s ,2012,12(3):615-629.[5] W a n g X ,F r a t t i n i P ,C r o s t a G B ,e t a l .U n c e r t a i n t y as s e s s m e n t i n q u a n t i t a t i v e r o c k f a l l r i s k a s s e s s m e n t [J ].L a n d s l i d e s ,2013,11(4):711-722.[6] 汤伏全,芦家欣,韦书平,等.基于无人机L i D A R 的榆神矿区采煤沉陷建模方法改进[J ].煤炭学报,2020,45(7):2655-2666.T a n g F Q ,L u J X ,W e i S P ,e t a l .I m p r o v e m e n t o f m i n i n g su b -s i d e n c e m o d e l i n g me t h o d b a s e d o n U A V L i D A R i n Y u s h e n m i n i n g a r e a [J ].J o u r n a l of C h i n a C o a l S o c i e t y,2020,45(7):2655-2666(i n C h i n e s e w i t h E n gl i s h a b s t r a c t ).[7] 冯威.高寒高海拔复杂艰险山区无人机勘察技术应用[J ].铁道工程学报,2019,36(8):9-13.F e n g W.A p p l i c a t i o n o f u n m a n n e d a e r i a l v e h i c l e s u r v e y te c h -n o l o g y i n a l p i n e a n d h i g h a l t i t u d e c o m pl e x a n d d i f f i c u l t m o u n -t a i n o u s a r e a [J ].J o u r n a l o f R a i l w a y E n g i n e e r i n g S o c i e t y ,2019,36(8):9-13(i n C h i n e s e w i t h E n gl i s h a b s t r a c t ).[8] 李杰林,杨承业,胡远,等.无人机三维激光扫描技术在地下采空区探测中的应用研究[J ].金属矿山,2020,49(12):168-172.L i J L ,Y a n g C Y ,H u Y ,e t a l .A p pl i c a t i o n r e s e a r c h o f U A V -L i D A R i n d e t e c t i o n o f u n d e r gr o u n d g o a f [J ].M e t a l M i n e ,2020,49(12):168-172(i n C h i n e s e w i t h E n gl i s h a b s t r a c t ).[9] 张欢,巨能攀,陆渊,等.基于无人机的滑坡地形快速重建与稳定性分析[J ].水文地质工程地质,2021,48(6):171-179.Z h a n g H ,J u N P ,L u Y ,e t a l .R a p i d r e m o d e l i n g of t h r e e -d i -m e n s i o n a l t e r r a i n a n d s t a b i l i t y a n a l ys e s o f l a n d s l i d e b a s e d o n U A V [J ].H y d r o g e o l o g y &E n g i n e e r i n g G e o l o g y,2021,48(6):171-179(i n C h i n e s e w i t h E n gl i s h a b s t r a c t ).[10]殷坤龙,张宇,汪洋.水库滑坡涌浪风险研究现状和灾害链风险管控实践[J ].地质科技通报,2022,41(2):1-12.Y i n K L ,Z h a n g Y ,W a n g Y.A r e v i e w o f l a n d s l i d e -ge n e r a t e d w a v e s r i s k a n d p r a c t i c e of m a n a ge m e n t of h a z a r d c h a i n r i s k f r o m r e s e r v o i r l a n d s l i d e [J ].B u l l e t i n o f G e o l o gi c a l S c i e n c e a n d T e c h n o l o g y ,2022,41(2):1-12(i n C h i n e s e w i t h E n gl i s h a b -s t r a c t ).[11]刘圣伟,郭大海,陈伟涛,等.机载激光雷达技术在长江三峡工程库区滑坡灾害调查和监测中的应用研究[J ].中国地质,2012,39(2):507-517.L i u S W ,G u o D H ,C h e n W T ,e t a l .T h e a p pl i c a t i o n o f a i r -b o r n e L i D A R t e c h n o l o g y i n l a n d s l i d e i n v e s t i ga t i o n a n d m o n i -t o r i n g o f T h r e e G o r g e s R e s e r v o i r a r e a [J ].G e o l o g y in C h i n a ,92h t t p s://d z k j q b.c u g.e d u.c n地质科技通报2023年2012,39(2):507-517(i n C h i n e s e w i t h E n g l i s h a b s t r a c t).[12]贾曙光,金爱兵,赵怡晴.无人机摄影测量在高陡边坡地质调查中的应用[J].岩土力学,2018,39(3):1130-1136.J i a S G,J i n A B,Z h a o Y Q.A p p l i c a t i o n o f U A V o b l i q u e p h o t o-g r a mm e t r y i n t h e f i e l d o f g e o l o g y s u r v e y a t t h e h i g h a n d s t e e ps l o p e[J].R o c k a n d S o i l M e c h a n i c s,2018,39(3):1130-1136(i nC h i n e s e w i t h E n g l i s h a b s t r a c t).[13]F a n t i R,G i g l i G,L o m b a r d i L,e t a l.T e r r e s t r i a l l a s e r s c a n n i n gf o r r o c k f a l l s t a b i l i t y a n a l y s i s i n t h e c u l t u r a l h e r i t ag e s i t e o fP i t i g l i a n o(I t a l y)[J].L a n d s l i d e s,2013,10(4):409-420.[14]V o g e M,L a t o M J,D i e d e r i c h s M S.A u t o m a t e d r o c k m a s s d i s-c o n t i n u i t y m a p p i n g f r o m3-d i me n s i o n a l s u rf a c e d a t a[J].E ng i-n e e r i n g G e o l o g y,2013,164:155-162.[15]C h e n J Q,Z h u H H,L i X J.A u t o m a t i c e x t r a c t i o n o f d i s c o n t i-n u i t y o r i e n t a t i o n f r o m r o c k m a s s s u r f a c e3D p o i n t c l o u d[J].C o m p u t e r s&G e o s c i e n c e s,2016,95:18-31.[16]D e w e z T J B,G i r a r d e a u-M o n t a u t D,A l l a n i c C,e t a l.F a c e t s:Ac l o ud c o m p a re p l u g i n t o e x t r a c t g e o l o g i c a l p l a n e sf r o m u n s t r u c-t u r e d3D p o i n t c l o u d s[J].X X I I I I S P R S C o n g r e s s,2016,41 (B5):799-804.[17]G o m e s R K,d e O l i v e i r a L P L,G o n z a g a L,e t a l.A n a l g o r i t h mf o r a u t o m a t i c d e t e c t i o n a n d o r i e n t a t i o n e s t i m a t i o n o f p l a n a rs t r u c t u r e s i n L i D A R-s c a n n e d o u t c r o p s[J].C o m p u t e r s&G e o-s c i e n c e s,2016,90:170-178.[18]B o r d e h o r e L J,R i q u e l m e A,C a n o M,e t a l.C o m p a r i n g m a n u a la n d r e m o t e s e n s i n g f i e l d d i s c o n t i n u i t y c o l l e c t i o n u s e d i n k i n e-m a t i c s t a b i l i t y a s s e s s m e n t o f f a i l e d r o c k s l o p e s[J].I n t e r n a t i o n-a l J o u r n a l o f R o c k M e c h a n i c s a n d M i n i n g S c i e n c e s,2017,97:24-32.[19]G u o J T,L i u Y H,W u L X,e t a l.A g e o m e t r y-a n d t e x t u r e-b a s e d a u t o m a t icd i s c o n t i n u i t y t r a ce e x t r a c t i o n m e t h o df o r r o c km a s s p o i n t c l o u d[J].I n t e r n a t i o n a l J o u r n a l o f R o c k M e c h a n i c sa n d M i n i n g S c i e n c e s,2019,124:104132.[20]R i q u e l m e A J,A b e l lán A,T o más R.D i s c o n t i n u i t y s p a c i n g a-n a l y s i s i n r o c k m a s s e s u s i n g3D p o i n t c l o u d s[J].E n g i n e e r i n gG e o l o g y,2015,195:185-195.[21]R i q u e l m e A,T o más R,C a n o M,e t a l.A u t o m a t i c m a p p i n g o fd i s c o n t i n u i t y pe r s i s t e n c e o n r o c k m a s s e s u s i n g3D p o i n t c l o u d s[J].R o c k M e c h a n i c s a n d R o c k E n g i n e e r i n g,2018,51(10): 3005-3028.[22]S l o b S.A u t o m a t e d r o c k m a s s c h a r a c t e r i s a t i o n u s i n g3D t e r r e s-t r i a l l a s e r s c a n n i n g[D].D i s s e r t a t i o n:I n t e r n a t i o n a l I n s t i t u t e f o rG e o-i n f o r m a t i o n S c i e n c e a n d E a r t h O b s e r v a t i o n,2010.[23]S t u r z e n e g g e r M,S t e a d D,E l m o D.T e r r e s t r i a l r e m o t e s e n s i n g-b a s e d e s t i m a t i o n o f m e a n t r ac e l e n g t h,t r a c e i n t e n s i t y a nd b l o c ks i z e/s h a p e[J].E n g i n e e r i n g G e o l o g y,2011,119(3/4):96-111.[24]U n l u s o y D,S u z e n M L.A n e w m e t h o d f o r a u t o m a t e d e s t i m a-t i o n o f j o i n t r o u g h n e s s c o e f f i c i e n t f o r2D s u r f a c e p r o f i l e s u s i n g p o w e r s p e c t r a l d e n s i t y[J].I n t e r n a t i o n a l J o u r n a l o f R o c k M e-c h a n i c s a nd M i n i n g S c ie n c e s,2020,125:104156.[25]Z h a n g P,Z h a o Q Y,T a n n a n t D D,e t a l.3D m a p p i n g o f d i s c o n-t i n u i t y t r a c e s u s i n g f u s i o n o f p o i n t c l o u d a n d i m a g e d a t a[J].B u l l e t i n o f E n g i n e e r i n g G e o l o g y a n d t h e E n v i r o n m e n t,2019,78(4):2789-2801.[26]A l b a r e l l i D S N A,M a v r o u l i O C,N y k t a s P.I d e n t i f i c a t i o n o fp o t e n t i a l r o c k f a l l s o u r c e s u s i n g U A V-d e r i v e d p o i n t c l o u d[J].B u l l e t i n o f E n g i n e e r i n g G e o l o g y a n d t h e E n v i r o n m e n t,2021,80(8):6539-6561.[27]贾虎军,王立娟,范冬丽.无人机载L i D A R和倾斜摄影技术在地质灾害隐患早期识别中的应用[J].中国地质灾害与防治学报,2021,32(2):60-65.J i a H J,W a n g L J,F a n D L.T h e a p p l i c a t i o n o f U A V L i D A Ra n d t i l t p h o t o g r a p h y i n t h e e a r l y i d e n t i f i c a t i o n o f g e o-h a z a r d s[J].T h e C h i n e s e J o u r n a l o f G e o l o g i c a l H a z a r d a n d C o n t r o l, 2021,32(2):60-65(i n C h i n e s e w i t h E n g l i s h a b s t r a c t). [28]吕权儒,曾斌,孟小军,等.基于无人机倾斜摄影技术的崩塌隐患早期识别及影响区划分方法[J].地质科技通报,2021,40(6):313-325,334.L v Q R,Z e n g B,M e n g X J,e t a l.E a r l y i d e n t i f i c a i o n a n d i n f l u-e n c e r a n g e d i v i s i o n m e t h o d of c o l l a p s e h a z a r d s b a s e d o n U A Vo b l i q u e p h o t o g r a p h y t e c h n o l o g y[J].B u l l e t i n o f G e o l o g i c a l S c i-e n c e a n d T e c h n o l o g y,2021,40(6):313-325,334(i n C h i n e s ew i t h E n g l i s h a b s t r a c t).[29]陈飞,崔健,王郑.垂起固定翼无人机激光雷达的电力巡检应用[J].测绘科学,2020,45(12):77-80,125.C h e n F,C u i J,W a n g Z.A p p l i c a t i o n o f v e r t i c a l f i x e d-w i n g U A Vc a r r y i n g L i D A R s y s t e m o n p o w e r l i n e i n s p e c t i o n[J].S c i e n c e o fS u r v e y i n g a n d M a p p i n g,2020,45(12):77-80,125(i n C h i n e s e w i t h E n g l i s h a b s t r a c t).[30]梁峰.基于遥感技术与深度学习的四川高陡山区典型地质灾害识别[D].成都:成都理工大学,2021.L i a n g F.T h e i d e n t i f i c a t i o n o f t y p i c a l g e o h a z a r d s i n S i c h u a n s t e e p m o u n t a i n o u s b a s e d o n r e m o t e s e n s i n g t e c h n o l o g y a n dd e e p l e a r n i n g t e c h n o l o g y[D].C h e n g d u:C h e n g d u U n i v e r s i t y o fT e c h n o l o g y,2021(i n C h i n e s e w i t h E n g l i s h a b s t r a c t).[31]Z h a n g W M,Q i J B,W a n P,e t a l.A n e a s y-t o-u s e a i r b o r n e l i d a rd a t a f i l te r i n g m e t h o d b a s e d o n c l o t h s i m u l a t i o n[J].R e m o t eS e n s i n g,2016,8(6):501.[32]R i q u e l m e A J,A b e l lán A,T o más R,e t a l.A n e w a p p r o a c h f o rs e m i-a u t o m a t i c r o c k m a s s j o i n t s r e c o g n i t i o n f r o m3D p o i n tc l o ud s[J].C o m p u te r s&G e o s c i e n c e s,2014,68:38-52.[33]崔溦,谢恩发,张贵科,等.利用无人机技术的高陡边坡孤立危岩体识别[J].武汉大学学报:信息科学版,2021,46(6):836-843.C u i W,X i e E F,Z h a n g G K,e t a l.I d e n t i f i c a t i o n o f i s o l a t e d d a n g e r-o u s r o c k m a s s i n h i g h a n d s t e e p s l o p e u s i n g u n m a n n e d a e r i a l v e h i c l e [J].G e o m a t i c s a n d I n f o r m a t i o n S c i e n c e o f W u h a n U n i v e r s i t y, 2021,46(6):836-843(i n C h i n e s e w i t h E n g l i s h a b s t r a c t).[34]Çe v i k E,T o p a l T.G I S-b a s e d l a n d s l i d e s u s c e p t i b i l i t y m a p p i n gf o r a p r o b l e m a t i c s eg m e n t o f th e n a t u r a l g a s pi p e l i n e,H e n d e k(T u r k e y)[J].E n v i r o n m e n t a l G e o l o g y,2003,44(8):949-962.[35]M c K e a n J,R o e r i n g J.O b j e c t i v e l a n d s l i d e d e t e c t i o n a n d s u r f a c em o r p h o l o g y m a p p i n g u s i n g h i g h-r e s o l u t i o n a i r b o r n e l a s e r a l-t i m e t r y[J].G e o m o r p h o l o g y,2004,57(3/4):331-351.03。
中科院力学所——便携式大气压空气冷等离子体发生器

中科院力学所——便携式大气压空气冷等离子体发生器中国科学院力学研究所应用等离子体力学课题组隶属于高温气体动力学国家重点实验室。
课题组已有近五十年历史。
多年来积累了直流等离子体射流产生技术、高频热等离子体射流、大气压非平衡等离子体、交流等离子体射流产生技术,以及多弧离子镀、中频对靶磁控溅射、射频感应等离子体镀膜等技术。
在等离子体状态控制和参数诊断方面有长期的工作经验和知识积累。
在等离子体材料工艺应用方面开展了大量的低气压/大气压等离子体喷涂、金属表面改性、熔敷、熔凝、镀膜等研究。
近年来课题组的主要研究方向集中在等离子体流动稳定性、先进空间电推进、空天高焓流动地面模拟、大气压空气冷等离子体发生器设计等领域。
便携式等离子体发生器技术介绍及特点等离子体是物质除固态、液态和气态之外的第四态,按照温度的不同,可以分为高温等离子体和低温等离子体,低温等离子体又分为热等离子体和冷等离子体;按照粒子温度分布的不同可以分为热平衡等离子体和非热平衡等离子体。
大气压冷等离子体以其温度低、无需复杂昂贵真空系统以及活性物质丰富等特征,近年来广泛应用于皮肤治疗、口腔医学、食品工程、材料改性、纳米合成和环境工程等领域,其主要活性物质包括活性氧和活性氮基团、激发态和亚稳态粒子、电场、带电粒子、紫外线及热量等。
近些年来,人们根据应用需求的不同,广泛设计了丰富多样的大气压冷等离子体射流发生器。
这些射流发生器主要以昂贵的稀有气体作为激发气源,同时等离子体工作离不开体积庞大的气源和电源设备。
如何借助自然界条件,充分发挥空气优势,实现大气压空气冷等离子体射流的应用值得我们探讨。
我们设计了一款便携式空气冷等离子体发生器,摆脱传统大体积的电源和气源设备,既可以在空气种激发,也可以在水下激发。
该便携式空气等离子体射流发生器设计使得大气压冷等离子体从实验室迈向市场走近人类生活成为可能。
应用领域杀菌消毒:伤口愈合、口腔治疗、医用工具消毒、家居卫生、水果保鲜;环境保护:空气净化、污水净化;材料制备:纳米材料合成。
“理论力学创新应用实验室”初见成效

“理论力学创新应用实验室”初见成效
张方洪;庄表中
【期刊名称】《高等工程教育研究》
【年(卷),期】2001()4
【总页数】2页(P91-92)
【关键词】理论力学教学;实验室;实验模型;实验教学;实验方法
【作者】张方洪;庄表中
【作者单位】浙江大学力学系
【正文语种】中文
【中图分类】O31-4;G482
【相关文献】
1.在力学应用中开拓创新思维:理论力学教学改革探索 [J], 陈乃立;庄表中
2.《理论力学》创新教育中虚拟实验室开发初探 [J], 许福东;陈义;周红贵;周思柱
3.中科院力学所非线性力学国家重点实验室招收纳、微化学物理力学博士研究生——欢迎物理、理论物理、材料、物化、力学等专业有志青年加入纳米微米科技研究队伍 [J],
4.中国科学院力学研究所非线性力学国家重点实验室招收纳米、微米化学物理力学博士研究生——欢迎物理、理论物理、材料、物化、力学等专业青年加入纳米微米科技研究队伍 [J],
5.中国科学院力学研究所非线性力学国家重点实验室招收纳米、微米化学物理力学博士研究生——欢迎物理、理论物理、材料、物化、力学等专业青年加入纳米微米科技研究队伍 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
科学家郭永怀的事迹材料
科学家郭永怀的事迹材料•相关推荐科学家郭永怀的事迹材料在学习、工作或生活中,大家对事迹材料都再熟悉不过了吧,根据事迹材料的性质,可分为正面典型材料和反面典型材料。
想拟事迹材料却不知道该请教谁?以下是小编为大家收集的科学家郭永怀的事迹材料,欢迎大家分享。
郭永怀是我国近代力学事业的开拓者之一。
他和钱学森、周培源、钱伟长等一道,规划了我国高等学校力学专业的设置。
他和力学家们运筹帷幄,认真研究了近代力学的发展方向,制定了学科的近期发展规划和远期奋斗目标,使我国力学学科的面貌大为改观,特别是近代力学科学一起步就有很高的基准,只短短的几年功夫,在某些方面就已接近于世界先进水平。
早在回国以前,郭永怀就同谈镐生探讨过回国后如何培养力学人才的问题。
回国后,他始终把培养科技人才当作头等大事来抓。
1956年,我国恢复建立研究生制度。
郭永怀积极筹划力学所的研究生培养。
在第一批招生中,他一人就带了5名研究生,以后又亲自带过几批。
他主张:培养人才要“言教、身教,以身教为主”。
在教学和科研中,他自己做表率,经常同年轻人一道解决一个个具体的技术问题。
在培养研究生和助手时,他注重使他们在理论分析和实验研究两个方面都得到提高。
他对年轻人的指导和帮助是启发式的、循序渐进的,重点强调掌握科研方法,提高科研本领,而不仅仅是解决某些具体问题。
在他的培养下,研究生中有不少已成为所级学术领导人或博士研究生的导师。
1957年,郭永怀和钱伟长组织并领导了清华大学力学研究班。
他除负责研究班的日常组织工作外,还亲自执教,讲授流体力学概论。
开课前,他把辅导教员找来,亲自带领他们到有关高等院校的实验室参观,对一些关键问题给予一些启示,再让他们为课程安排一个实验计划,使这门课做到理论联系实际。
临毕业前,郭永怀亲自指导安排学员们的毕业论文题目,并设法每周都同辅导教员和学员碰头,了解进展情况,帮助解决问题。
清华大学力学研究班前后共办了三届,毕业生达290多名。
中科院力学所读研好么

中科院力学所读研好么中科院力学所作为中国科学院的直属研究机构,是国内力学领域的一流研究机构,其在国内外学术界享有盛誉。
那么,选择在中科院力学所读研究生究竟好不好呢?中科院力学所的师资力量非常强大。
力学所拥有一批具有深厚学术造诣和丰富研究经验的教授和研究员,他们是国内力学领域的顶尖人才,具有很高的学术声誉和影响力。
在这里学习,可以接触到最前沿的科研成果,与一流学者进行学术交流,提高自身的学术水平。
中科院力学所拥有先进的研究设备和实验平台。
作为一所力学研究机构,力学所在实验设备和技术方面具有很强的优势。
学生可以利用这些设备和平台,开展自己的科研工作,进行实验验证和数据分析,提高科研能力。
中科院力学所还有丰富的学术资源和合作机会。
作为国内顶尖的力学研究机构,力学所与国内外众多高校和研究机构有着密切的合作关系。
学生可以利用这些资源和机会,参与国内外合作项目,开展跨学科的研究工作,扩大自己的学术视野。
中科院力学所也注重培养学生的综合素质。
除了专业课程和研究工作,学生还可以参与各种学术交流和科研活动,提升自己的学术能力和团队合作精神。
力学所还定期举办学术讲座和研讨会,邀请国内外知名学者来校交流,为学生提供更多学习和交流的机会。
当然,选择在中科院力学所读研究生也面临一些挑战和考验。
力学所的学习环境相对较为紧张,学术压力较大。
学生需要具备坚实的基础知识和较强的学习能力,才能适应这样的学习环境。
此外,力学所的科研项目较多,学生需要有较强的科研兴趣和动力,才能在这个领域取得突破性的研究成果。
选择在中科院力学所读研究生是一个非常好的选择。
这里拥有一流的师资力量、先进的研究设备和实验平台,丰富的学术资源和合作机会,有助于提高学生的学术水平和科研能力。
但同时也需要学生具备较强的学习能力和科研兴趣,才能适应这样的学习环境,取得良好的学术成绩。
希望对考虑在中科院力学所读研的同学有所帮助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中国科学院力学研究所环境力学重点实验室研究工作进展刘青泉【摘要】@@ 中国科学院力学研究所环境力学重点实验室(Key Laboratory of Environmental Mechanics,LEM)是力学研究所重点培育发展的实验室之一.中国科学院力学研究所最早在国内倡导环境力学研究,积极推动力学与环境科学的交叉与融合.早在1960年代就开始环境问题研究,1986年正式组建了环境流体力学研究组,1989年和1992年成立了环境流体力学和环境工程研究室.【期刊名称】力学进展【年(卷),期】2010(040)003【总页数】4中国科学院力学研究所环境力学重点实验室(Key Laboratory of Environmental Mechanics,LEM)是力学研究所重点培育发展的实验室之一.中国科学院力学研究所最早在国内倡导环境力学研究,积极推动力学与环境科学的交叉与融合.早在1960年代就开始环境问题研究,1986年正式组建了环境流体力学研究组,1989年和 1992年成立了环境流体力学和环境工程研究室.1995年合并成立了环境科学与技术研究中心,2007年成立了环境力学中心.经过20余年的发展,人才队伍建设和科研能力建设都达到了较高水平,尤其在流域及海洋水环境、重大工程中的环境与灾害、大气与城市环境、工业节能减排和废弃物处理等方面,逐步形成学科优势,取得了丰硕科研成果,于2008年12月正式成立了环境力学重点实验室.LEM的总体定位是,面向国家发展战略需求,致力于解决重大环境及灾害过程的力学关键科学问题;重点研究影响和制约我国社会与经济可持续发展的重大及区域水环境、工业减排和城市大气污染、重大自然与工程灾害中的力学机理和演化规律;不断突破关键技术并开拓新的研究方向,为我国环境保护、防灾减灾提供科学依据和技术支撑;建设特色鲜明、系统配套的科学实验和数值模拟平台;促进我国环境力学领域的人才队伍建设,推动和引领我国环境力学的学科发展,建成具有国际重要影响的环境力学开放研究基地.LEM 主要瞄准重大环境和重大灾害两大领域,发挥力学学科的优势,运用力学的基本原理和研究方法,注重机理和定量化研究,着重研究重大环境与灾害过程中的关键力学科学问题,揭示重大环境与灾害的发生机理与演化规律,为环境保护、环境修复、节能减排、灾害预防、污染治理提供科学依据、技术支撑和工程解决方案.实验室确定的3个研究方向包括:(1)自然环境流动规律及其环境影响;(2)自然及工程地质灾害的预测、评价理论及方法;(3)工业减排和城市环境污染及控制.并在近期面向环境科学的发展大趋势和国家对环境保护、灾害预测方面的重大需求,在3个主要研究方向上分别重点研究:(1)重大水环境的演化规律和治理方法;(2)滑坡与溃坝灾害的发生机理和预测评价方法;(3)应对全球气候变化的工业节能减排和城市大气污染.LEM 设有流域水环境、海洋环境与工程应用、工程地质力学及应用、大气环境与数值模拟、高效洁净燃烧、废弃物处理6个课题组,现共有固定科研人员31名.其中中国科学院院士2名,研究员(博士生导师)9名,国家杰出青年基金获得者1名,科学院“百人计划”1名,973项目首席科学家1名,副研究员9名,高级工程师和高级实验师3名.形成了一支以著名环境力学家李家春院士和著名等离子体与燃烧学家吴成康院士为学术带头人的高水平环境力学研究队伍.同时,实验室积极培养高水平青年人才,目前在站博士后、在读博士生和硕士生共67名.LEM以自主创新为主,建设了水环境实验系统、地质灾害实验系统、燃烧与等离子体实验系统、大气环境实验系统和环境力学数值仿真平台,构建了实验室的技术支撑体系,基本形成集理论分析、实验研究和数值模拟为一体,装备配套的环境力学开放研究基地.并分别与英国Swansea大学和北京世纪源博科技有限公司成立了“中英非连续介质力学及其工程灾害联合实验室”和“工业余热综合利用联合实验室”.LEM坚持国家需求牵引,学科推动,积极承担国家重要科研任务.2005年以来承担了70余项科研任务,包括“973”国家重点基础研究发展规划项目、国家“863”计划项目、国家自然基金重点项目、国家杰出青年科学基金项目、中国科学院知识创新工程重要方向项目、科学院百人计划项目、欧盟国际合作项目、自然科学基金面上项目,以及面向国民经济建设的横向项目,总到位科研经费款6500余万元.尤其2009年,实验室新主持承担地质体灾害领域“973”项目1项、煤层气开采领域的科技专项1项、高速列车气动噪声方面的国家支撑计划1项、水环境灾害领域的自然科学基金重点项目1项,合同额约6400万元.目前在研项目近50项,总合同额达1.0亿元,为实验室的进一步发展提供了重要保证.LEM在环境力学与灾害防治领域研究方面有长期积累,取得了丰硕的成果,曾获全国科技大会奖1项、国家自然科学四等奖1项、国家发明二等奖1项、中国科学院科技进步一等奖3项、中国科学院自然科学二等奖3项、中国科学院科技进步二等奖7项、何梁何利科技奖1项等重要奖励21项.2005年以来,获周培源力学奖1人,获石油与化工行业科技进步一等奖1项,重庆市科技进步二等奖1项,中国科学院抗震救灾先进科技团队,创新为民、科技救灾先进集体和先进个人.获国家杰出青年科学基金1人,入选“新世纪百千万人才工程国家级人选”1人,科学院“百人计划”1人.近年来,LEM在自然环境复杂流动及其环境影响、重大工程于地质灾害、工业环境与节能减排等3个主要研究方向获得显著的研究进展,主要研究成果体现在以下几个方面:1 自然环境复杂流动及其环境影响1.1 干旱环境土壤侵蚀动力学(1)针对黄土高原的复杂地形地貌特点,提出坡面流阻力的分类模式,充分考虑微小尺度流动对坡面流宏观阻力的影响,建立了坡面薄层水流的小尺度流动数值模型.通过数值模拟实验,细致讨论了坡面薄层水流的流动及其阻力特性,分析了绕流在其中发挥的重要作用,初步得出阻力与常见参数(如坡度、流量)之间的关系.(2)建立了能够合理反映植被覆盖、地形影响和非均匀降雨入渗过程的坡面降雨入渗产流模型,定量揭示出降雨过程、坡面特征和地表条件等因素对坡面产流的影响规律.进一步针对不平整复杂坡面,发展了二维坡面产汇流动力学模型,实现了对坡面流汇流和流路集中过程的自动模拟,为坡面上细沟的产生、发展以及细沟侵蚀计算提供了技术途径和方法.(3)针对黄土高原坡面通常存在不同的侵蚀模式,建立了物理机制清楚的细沟间侵蚀和细沟侵蚀动力学模型,发展了包括不同侵蚀模式的复杂坡面侵蚀输沙动力学预报数值模型,并进一步建立了能够较为准确描述细沟汇流的二维坡面侵蚀动力学模型.得到了坡面侵蚀的基本特征,以及坡度、坡长、雨型、雨强等因素对土壤侵蚀的影响规律,分析了侵蚀与坡度的定量关系,揭示了界限坡度并非常数的物理机制,给出了侵蚀界限坡度的科学解释和定量范围.(4)通过充分考虑和区分坡面流与沟道水流的不同特性,分别采用运动波和扩散波模型,并引入水流与沟道的自适应和反馈过程,将坡面二维产流及侵蚀模型推广到小流域,建立了小流域降雨产流产沙动力学预报模型,应用于黄土高原黑草河小流域,预报结果与观测资料符合很好,较过去的分布式水文模型有明显改进.1.2 河口非恒定流输沙(1)基于对径流和潮流共同作用下河口水流特征的深刻分析,应用平板振荡边界层理论及波流分解方法,导出了往复运动水流的流速垂向结构,获得了精确描述河口水流垂向结构的理论模式,该模式可以反映河口憩流时刻附近表底水流反向运动的特征.(2)运用大涡模拟方法,研究波流边界层中的湍流运动,建立了波流边界层湍流的数据库;对湍流数据库进行统计分析,获得了波流边界层湍流猝发结构的时空特征,即平均猝发周期和平均猝发面积比;利用平均猝发周期和平均猝发面积比对波流掀沙通量进行参数化,获得了基于湍流猝发特征的参数化波流掀沙通量公式. (3)采用Stokes动力学方法,从颗粒尺度研究群体泥沙的絮凝运动,建立了模拟泥沙颗粒絮凝沉降过程的模型,运用Ewald求和、周期域及并行计算等技术,加快了计算速度,研究了盐水环境中的群体泥沙沉降运动,获得了宏观沉速与盐度的关系.另一方面,基于细颗粒泥沙的絮凝过程和絮团分形特征,获得了一个包含盐度和基本粒子尺寸等动力学因素的泥沙絮团沉速理论公式,得到天津新港泥沙沉降实验结果的验证.(4)针对河口径流、潮汐、波浪、盐水等环境条件,在对河口水流结构、波浪掀沙、泥沙絮凝沉降等有关非定常输沙基本理论问题系统研究的基础上,分别建立了适用于狭长型河口的一维和垂直二维、适用于宽阔河口的水平二维、以及准三维水-盐-沙输运模型,并用以研究了河口盐水入侵、最大浑浊带等环境现象,揭示出二者随径流和潮流相对强弱变化的规律.应用于长江口实际情况,为深水航道治理工程提供了科学依据.1.3 湖泊水质环境(1)基于对太湖地形和水动力特征的分析,建立了太湖平面二维浅水动力学模型和相应的模型参数系统.通过对太湖风生流的模拟,分析了太湖风生环流的基本形态特征,得到了不同湖区的流动规律和水动力特征,揭示了不同湖区流动差异的形成原因,以及太湖水体交换机制和特征.(2)给出了湖泊富营养化评价的一般标准,以此为基础,根据太湖多年水质监测数据,分析了太湖水质现状,研究了太湖水质的时空变化特征;在二维水动力模型基础上,建立了物质输移扩散模型,以总磷为研究对象,建立了太湖总磷浓度场模型.细致模拟分析了太湖总磷浓度的时空分布特征,揭示了太湖流场对总磷时空分布的影响规律.(3)建立了以藻类生长为核心的生态动力学模型,结合二维水动力模型和物质输移扩散模型,初步建立了太湖水质生态-水动力学耦合模型;对太湖藻类生长的特征和影响因子进行了数值模拟研究,结果表明,磷是太湖藻类生长的营养盐限制因子,温度是太湖藻类生长的主要控制因子,得到了它们影响藻类增长的阈值范围,并给出了太湖藻类生长和水华暴发的危险区域分布.1.4 海洋环境和流固耦合(1)研究了两层分层的线性、2∼5阶Stokes、椭圆余弦内波,以及强非线性孤立内波理论的适用范围;建立了基于高阶KdV方程的内孤立波演化模型,分析了内波在复杂地形的传播演化规律;采用摄动展开法导出了连续分层和强分层长内孤立波诱导的垂向流场本征值问题,给出了基于势函数理论的内波流场计算方法.应用于南海,给出了白云凹陷处的内波流场和特征参数.在此基础上,研究了海洋平台在内波流场中的内波载荷和运动响应,开发了海洋平台内波载荷计算软件,为南海油田开发提供了科学依据.(2)综合考虑波流与海底泥沙的耦合,提出了沙波尺度不同其运移机理各异的基本概念,建立了风浪、潮流联合作用下大(小)尺度沙波的力学模型,将粗沙质沙波运移的经验公式模型拓展到细沙质情况,解释了理论与实测不符的原因;针对南海北部湾海域地形特征提出了三维计算模型,成功预测了该海域海底沙波运移. (3)建立加载波与底床土层的耦合力学模型,探究各种加载条件下海底土层的动力学特征,给出了波浪衰减因子与海底土层性质对应的分区图;研究了粉土质底床的特性,从理论上揭示了其共振液化机理,合理地解释了实验现象;针对极端波况,给出布局防波堤、桩柱等工程设施的位置时应避开的敏感区域,为工程设计提供了可参考的科学依据.(4)深入分析了结构、冰运动以及冰破碎的复杂动力学性质,建立了一个IIV动力学模型,揭示了IIV共振是强迫振动和自激振动在一定条件下的结合,以及IIV共振中的自激成分是冰破碎的动力学性质造成的冰与结构动量交换的非对称性引起的一种正反馈机制,预报了结构特性和冰的特性对锁频的影响.2 自然及工程地质灾害2.1 滑坡灾害发生机理及监测预警系统(1)针对滑坡研究的对象(地质体)具有非均质、非连续、流固耦合和未知当前状态等复杂特性,提出了基于连续介质力学离散元方法(continuum-based discrete element method,CDEM).该方法不仅可以模拟不同尺度地质体材料的非均质、非连续、流固耦合的特性,而且可以模拟地质体由连续到非连续的演化过程,利用该方法开发了“基于离散元法的边坡稳定性分析软件”,发展了滑坡预测预报研究理论和方法.(2)提出了一种基于浮点遗传算法,应用样条函数构筑滑裂面减小自由度的有效搜索边坡非圆弧滑裂面的数值方法.建立了均质及带裂隙边坡的饱和-非饱和耦合渗流模型,进一步发展了边坡渗流与稳定性耦合分析方法和动力学模型,细致分析了水渗流诱导滑坡的内在机理;应用于三峡滑坡,揭示了降雨和库水位涨落对滑坡体稳定性的影响规律.(3)开发了两类地质体变形监测设备,一类是专业监测设备,包括地表位移监测设备、深部滑坡监测设备、地下水位监测设备和降雨量监测设备,可在野外无人值守环境下,低成本、高精度、全天候、全自动地对滑坡变形进行长期动态监测,并实现了监测数据实时,无线传输.另一类是滑坡监测专业手机,实现了“群测群防”滑坡点监测数据的无线自动传输和数字化管理,克服了以往“群测群防”监测数据传输效率低、数据分析和利用效率低、数据管理困难等缺点.(4)提出了将当地居民、政府管理部门和科研人员3方面的力量有机结合起来的“CAS”减灾防灾模式.以信息技术为载体,将滑坡动态监测技术与数值模拟相结合,发展了滑坡灾害监测、预警及决策技术.在Skyline,ArcGIS和力控等商用软件二次开发的基础上,融合多项具有独立知识产权的监测手段、数值模拟分析方法开发了“滑坡灾害监测、预警及决策系统”,为滑坡灾害防治决策科学化及实施预案奠定了基础.2.2 洪水及风暴潮灾害(1)建立了复杂主支流交汇的力学模型和简化解析解,得到了主支流交汇的相互影响规律;发展了一、二维交错衔接的洪水演进动力学模型和复杂水系的洪水预报模型;通过概化实际问题为几种典型模式,有效排除次要因素的分析方法,突出复杂水系洪水相互作用的内在机理.应用于实际问题研究,为区域防洪决策提供了科学依据.(2)气候变化加剧了大气环流发展的非平稳过程,为了合理分析和预测台风频率和强度极值,通过细致分析西北太平洋地区1945年∼2008年热带气旋资料,采用时间序列和概率密度分布方法,以PDI指数为表征,并利用极值理论,得到了南海地区热带气旋发生的频次和强度以及非平稳过程下的极值风速,主要表现为年发生频次的增加和强度增加,非平稳过程下50年一遇的极值风速相比平稳过程增加了3.2%左右.(3)针对台风导致的风暴潮问题,建立了风暴潮流及其诱起的泥沙输运的二维数学模型,研究了气压、风应力、海深、底坡等对风暴潮位、流场结构、水流速度等的影响.应用于台风过境港湾的泥沙输运研究,详细讨论了台风路径、强度、移动速度等对港湾泥沙输运的影响规律,发现港湾内地形的冲淤情况决定于台风的移动方向,而冲淤的幅度决定于台风强度和其路径与港湾的相对位置.(4)针对水体渗流可能导致的土石坝体和河道堤防破坏问题,深入研究了复杂土石结构体的水渗流规律,建立了降雨入渗、堤基管涌、堤坝渗流及其与应力变形的耦合有限元模拟方法,编制了大型计算软件,并在大渡河、黑水河、拉萨河水电开发等工程中得到应用,初步实现了大型渗流和土石体结构破坏耦合计算模型的软件化.3 工业减排和环境污染及控制3.1 气固两相反应流对于燃烧污染物排放的影响(1)通过煤粉燃烧和流化床燃烧实验发现不同的空气-燃料比下HCl对于NOx的生成影响不同;实验结果表明HCl对NO生成所起的作用受到温度的影响;从基元反应机理入手,认为HCl影响NO生成的最终结果由HCl导致自由基减少和增加的两类基元反应的相互竞争决定.这些基础研究结果对研究含氯燃料燃烧中的污染物排放、考察HCl在燃料分级燃烧和选择性非催化还原等方法中的影响有重要意义.(2)通过理论分析和实验相结合,详细研究了煤与生物质混合燃烧或气化过程中燃料中所有主要矿物元素对于氯、钾和钠释放与沉积规律的影响,阐明了不同温度、压力和空气-燃料比下典型生物质中碱金属和氯的释放行为,分析了燃烧过程中结焦现象产生的原因.研究结果对于生物质燃烧中的结焦抑制和可吸入颗粒物减排有重要作用.(3)采用DPIV系统测量了颗粒流动和传质的特性,得到了气泡、颗粒运动以及换热特性不同于一般流化床的规律;测量了颗粒运动的速度场和颗粒扩散特性,分析计算得到颗粒的横向扩散系数;通过热态试验研究了非均匀布风对流化床燃烧温度的影响,并验证了非均匀布风流化床中换热系数的关联式.揭示了非均匀布风在流化床流动、传质、传热和燃烧中的作用,对于燃烧高水分、低热值的燃料有一定意义.(4)通过管道中燃烧波传播过程的实验研究,比较了不同气体在管道中燃烧波的加速特性,得到燃料的种类、浓度、燃烧室的阻塞比(燃烧室结构)、出口面积比等参数与火焰(燃烧波)速度和压力波峰值压力的相互关系,总结出一套非定常燃烧的控制方法;建立扰动对管道中燃烧波发展影响的简化分析模型.成功发展了“燃烧气脉冲除灰技术“并广泛应用于大型电厂锅炉;进一步发展了低品位余热(间歇性、爆炸性和多尘性)的利用技术,研究结果已应用于我国首台10MW电炉余热电站示范装置建设.(5)利用计算流体力学的方法对双套管气力输运过程中各参数的变化进行了详细的数值模拟.将输运分为起始段和充分发展段分别研究,保证气流量守恒,输料率守恒,编写总体能耗的计算程序.该程序能够在已知输料率和输送距离的前提下给出能耗最小的气动参数.3.2 等离子体危险废物处理(1)采用磁矢量势取代磁感应强度来描述磁场,使描述等离子体运动的偏微分方程组均化成椭圆型的,发展了基于磁矢量势的电弧模型和耦合化学动力学,避免了传统磁流体力学模型中磁场的积分运算,大大减少了计算量,并克服了传统Maxwell方程难于耦合高温化学反应计算的困难.(2)采用等离子体弧技术,研发了三相交流工频等离子体反应器和直流等离子体反应器,实现了对危险废弃物的还原裂解处理,不仅可以有效打断有机物的化学键,达到很高的摧毁效率,还不会在处理过程中排放NOx,CO和二恶英类等在有氧环境下生成的有害物质.(3)通过对造渣添加剂、进料形态、反应过程中传热和传质过程控制等方面研究,掌握了将固体残渣形成物理和化学性质均极为稳定的玻璃体,使残渣对有害物质捕集效率方面得到大幅度提高,优于国际先进水平.(4)提出氧碳比概念,数值分析了温度、含水率、氧碳比对平衡产物分布和合成气回收的影响;研究了钙氯比、温度和水蒸气浓度对脱氯效率的影响,提出了还原气氛下提高脱氯效率的尾气处理设计思想;发展了完善的等离子体处理系统的尾气处理系统,确保其对环境的影响优于焚烧法2∼3个数量级.(5)研制建成了含预处理进料、主反应器和尾气处理子系统的完整的等离子体弧裂解废弃物的实验室规模示范系统(3t/d);并建成了国内首套工业规模的化工固体危险废物处理系统和陕西咸阳医疗废弃物中试基地.。