新型Hy_Vo齿形链与链轮的啮合分析及其设计方法
新型齿轮啮合原理
新型齿轮啮合原理陶永锋(机械与汽车工程学院指导教师:刘鹄然)第一章绪论1.1概述本课题从实际生产中的一些冶金重载齿轮齿面发生严重塑性变形中得到启发,认为必然存在最适合齿轮接触强度和弯曲强度的齿形,并分析了这种齿形的形成原理。
经缜密分析和深入研究,初步认为这是等共轭曲率高阶接触的齿形,本课题有可能发展成一门新的学科或分支:齿轮仿形原理。
类似于仿生学但模仿的却是没有生命的东西.并扩展到等共轭曲率啮合的多种应用形式: 内啮合,齿轮与齿条,斜齿圆柱齿轮,斜齿轮与斜齿条,直齿圆锥齿轮, 弧齿圆锥齿轮, 面齿轮,等共轭曲率蜗轮蜗杆。
证明等共轭曲率高阶接触啮合的实现条件.等共轭曲率啮合的媒介齿条的齿廓的构成.与此适应创立仿射啮合理论——活动标形新形式.导出等共轭曲率啮合齿面啮合点邻域间隙的4阶参数.高阶切触的齿面接触应力计算,高阶接触齿面的流体动压润滑和弹性流体动压润滑计算.本课题具有较大学术价值。
如成功对齿轮传动具有里程碑式意义,是本人指导老师的前导师蔡春源老先生多年夙愿和临终嘱托。
本课题的目的旨在提出一类等共轭曲率高阶接触啮合的传动。
1984年,本人指导老师与东北大学蔡春源,鄂中凯,何德芳等长期从事齿轮强度研究的著名专家研究生同窗陈良玉在鞍钢初轧厂调研时,发现主减速器齿轮在经长期运转后齿面形成如图1所示形状,自然形成类似于双圆弧齿形但又不完全同于双圆弧齿轮,还有很多齿轮出现类似的情况,即意识到这种齿形有可能是一种最自然的齿形(或称稳态齿形)。
这种现象有可能用梅兰塑性势理论和普朗特-路埃斯以及列维-密赛思流动法则来解释:以密赛思屈服函数作势函数建立流动法则,塑性应变增量的分量所组成的向量在应力点沿屈服面的外法线。
但正如仿照磨损后的轧辊,却并不刻意的去研究磨损过程本身。
本课题并不刻意的去研究齿面塑性流动本身。
经大量收集资料,测量和计算,并经缜密分析和深入研究,初步认为这是等共轭曲率的齿形。
接触和弯曲强度都很高,极易形成动压油膜。
双节距齿形输送链条设计与试验

双节距齿形输送链条设计与试验王文成;刘晓论;孙威;何丽妍;武添松;刘家郡【摘要】研究了齿形链啮合机理和设计方法,提出了一种双节距齿形输送链条.对其结构特性及啮人冲击速度进行了分析,给出了链条主要设计参数及其关系式,并对其进行了200 h的磨损试验,试验结果表明:200 h后,双节距齿形输送链条的磨损伸长率仅为0.149%,明显低于传统的双节距滚子输送链条.验证了双节距齿形输送链设计方法的合理性.%A type of double-pitch silent chain for conveyors was proposed. Its structure was designed andrnthe relative parameters and designed formula were given. And wear test for 200 h was done. The results showed that the ratio of wear elongation of double-pitch silent chain for conveyors was 0. 149% , which was shorter than the double-pitch roller chain' s, and the design could improve the conveying conditions distinctly. Therefore, the design of double-pitch silent chain for conveyors showed the feasibility of pplication.【期刊名称】《农业机械学报》【年(卷),期】2013(044)002【总页数】5页(P243-247)【关键词】滚动铰链;双节距齿形链;变节距特性;设计;试验【作者】王文成;刘晓论;孙威;何丽妍;武添松;刘家郡【作者单位】吉林大学机械科学与工程学院,长春130025;吉林大学链传动研究所,长春130025;吉林大学机械科学与工程学院,长春130025;吉林大学机械科学与工程学院,长春130025;吉林大学机械科学与工程学院,长春130025;吉林大学链传动研究所,长春130025【正文语种】中文【中图分类】TH132.45引言双节距滚子链是应用最广泛的输送链条之一[1]。
演示版齿轮啮合.ppt
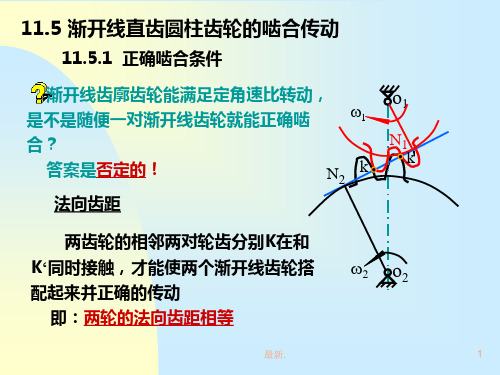
N2 B1
际啮合线长度。显然,随着齿顶圆 的增大, B1B2线可以加长,但不会
rb2
超过N1、N2点,N1、N2点称为啮
合极限点,N1N2是理论啮合线长度。
o2
当B1B2恰好等于Pb时,即前一对齿
在B1点即将脱离,后一对齿刚好在B
2点接触时,齿轮能保证连续传动。
1 rb1
B2N1
ra2 2
最新.
7
但若齿轮2的齿顶圆直径稍小,它 与啮合线的交点在B2´,则B1B2´<Pb。 此时前 一 对齿即将分离,后一对齿尚 未进入啮合,齿轮传动中断;
节线
k
节线
pk
(分度线) p
分度线
n
v2 1 2
n
v2
1 2
(1)中心连线为过齿轮回转中O1且垂直于齿条移动方向的直线。
中心距为齿轮中心到齿条分度线的垂直距离。
v r (2)过瞬时接触点所作齿廓公法线为一固定直线nn,它与中心线
的交点为固定点P(节点)所以
2
11
(3)齿轮齿条传动也具有中心距可最变新.性。(α=α’;r1=r1’) 17
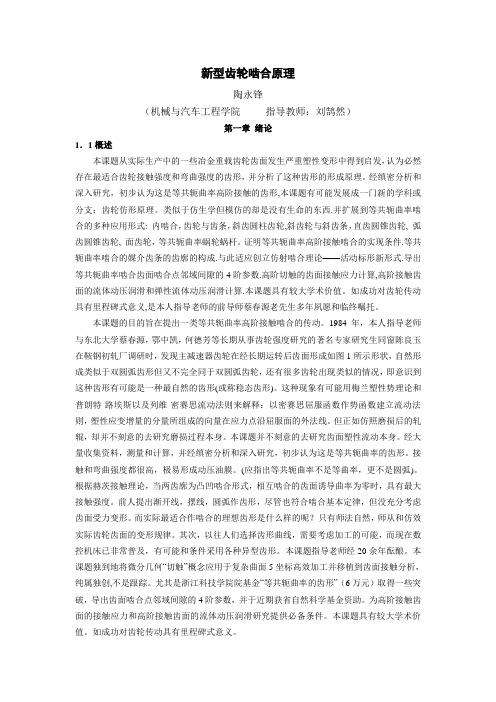
渐开线齿轮传动的重合度
齿轮传动是依靠两轮 的轮齿依次啮合而实 现的。
具体啮合及重合度的 概念观看右图演示。
图11.10所示为ε=1.3的情况,当前一对齿在c点啮合时, 后一对齿在B2点接触, 从此时开始两对齿同时 啮合,直到前一对齿到 达Bl点,后一对齿到 达D点为止。因此,啮 合线上的B1C和DB2区间 是双齿啮合区。从D点开 始到C点只有一对齿啮合, 是单齿啮合区。所以ε=1.3 表明在齿轮转过一个基圆齿距 的时间内有30%的时间是双齿啮合,70%的时间是单齿啮合
11.5 渐开线直齿圆柱齿轮的啮合传动
齿型链的改进设计与分析

第19卷第4期 2011年8月安徽建筑工业学院学报(自然科学版)Journal o f Anhui Inst itute of A rchitecture &I ndustr yVol.19No.4 Aug.2011收稿日期:2011-03-03作者简介:李绍青(1972-),讲师,硕士,主要研究方向为计算机辅助工程。
齿型链的改进设计与分析李绍青, 张克仁(安徽建筑工业学院机械与电气工程学院,合肥 230601)摘 要:分析了链传动中多边形效应对传动平稳性的影响,指出多边形效应引起的横向位移波动远远大于纵向位移波动。
研究发现,齿形链中多边形效应依然存在的根本原因是工作过程中链条齿未完成啮合任务即提前进入转动。
针对这个问题对齿形链进行了改进,并对改进机构进行了理论分析和运动仿真。
分析和仿真结果显示这种改进使得链齿能够完成啮合任务,从而大大降低了横向位移波动,提高了链传动的工作质量。
关键词:链传动;啮合;多边形效应;重合度;仿真中图分类号:T H 132 文献标识码:A 文章编号:1006-4540(2011)04-025-05Improving design and analysis of the silent chainLI Shao -qing, ZH ANG Ke -ren(School of M echan ical and Electrical Engineering,An hui University of Architecture,H efei 230601,China)Abstract:The influence o f po lyg on effect on the stability of chain drive w as analyzed,finding that the displacement fluctuatio n caused by po lygo n effect w as far g reater in lateral than that in long itude.Re -search indicated that the underlying cause o f polygo n effect in silent chain was that teeth of the chain can .t complete its m esh but turn to ro lling ahead of schedule.So an im pro ving desig n w as m ade o n s-i lent chain and analy sis and simulation w as done on it.The r esult show ed that the improv em ent ena -bled the teeth to com plete its m esh task,reducing the lateral displacem ent,enhancing the chain .s w orking state.Key words:chain drive;mesh;poly gon effect;co ntact ratio;simulatio n 链传动是工程中较为常用的传动机构。
齿形链知识简介

齿形链参数设计
齿形链参数设计
上表是在工程中实用的综合曲率半径。适度增大内-外复合啮合齿形链内侧工 作齿廓的曲率半径,有利于增加同时参与啮合的链轮齿数与链节数,改善链条的 受力状态。 (5)伸出量δ 伸出量δ对链条多边形效应的有影响,δ值大,对减小链条的多边形效应的作 用大。但是如果过大,当相邻的链节转过2π/z角度,在轮齿上啮合就位时,内啮 合无法转为外啮合,当链轮的齿数较多的时候,转过的2π/z角度更小了,这种现 象就会更容易产生。 δ值过小,相邻的链节转角很小的时候就转变为外啮合,减 小多边形效应的功能就降低了。 所以伸出量δ值应该在一个合理的范围内优选。一般δ随着节距增大而增大。 又随着链轮齿数的增加而减小。据桂盟的经验通常可取δ=0.10~0.30mm,节距较 小且链轮齿数较多的时候取较小值,节距较大且齿数较少的时候取较大值。 (6)内侧工作齿廓曲率半径中心坐标x1 、y1 ,当确定了边心距f 、伸出量δ、 内侧工作齿廓曲率半径,当齿形角α =30°时,由链板图可导出:
x1=(r-f-δ )sin(λ +60°)/cosλ y1= (r-f-δ )cos(λ +60°)/cosλ
齿形链参数设计
通常λ =9°~11°。当λ 取较小值时,内侧工作齿廓与链轮轮齿的啮合区上 移,当λ 取较大值时,其啮合区下移。所以对于宽腰形齿形链来说λ 应取较大值。 窄腰形齿形链λ 应取最小值,但是最终值的取定要通过计算机仿真来进一步验证 其合理性。 当知道了内侧工作齿廓曲率半径r、内侧工作齿廓曲率半径中心坐标x1 、y1 、 边心距f时,也可以反求出其伸出量为: δ=r-f- X Ycosλ (其中λ =arctan x1 / y1 -60°) 现在有一种新的观点:当内侧工作齿廓曲率半径r一定时,内侧工作齿廓曲率 半径中心坐标x1 、y1 的变换,将直接的影响齿形链与连轮的啮合特性与传动性能。
新型hy-vo齿形链的啮合分析及其设计

新型hy-vo齿形链的啮合分析及其设计随着经济发展和科技进步,传统的齿形链的使用受到越来越多的限制和改进,然而,受限于传统齿形链的技术不足,新一代hy-vo技术的研发应运而生。
hy-vo技术,又称蜗轮齿形链,是指将普通的两级齿形链及摆轮结合成一种混合形式的运动传动装置,可进一步增强传动性能,是传统齿形链的有效补充。
从外观上看,hy-vo齿形链仍然是齿形链,内嵌在特定位置的外摆轮增加了装置的可靠性和刚度,解决了传统齿形链频繁变形的问题。
在传动系统的设计方面,可以利用摆轮来降低速度比,使其达到更高的传输效率,更少的扭矩损失。
在啮合方面,hy-vo齿形链优于传统齿形链,其新型结构重新设计了摆轮,使得啮合前后两齿更加匹配,紧凑而有效,可以达到更小的啮合角度要求。
此外,摆轮还可以提供更好的张力支撑,以降低因张力变化而带来的对啮合匹配的影响,更稳定地传输动力。
设计新一代的hy-vo齿形链需要考虑到啮合的精度,结构的刚度,链轮的运动摩擦系数,以及耐久性和配合等因素。
首先需要确定啮合范围,和适当的齿形参数,如齿顶高,齿顶半径,齿根半径,齿槽深度,齿数,体积系数等,以保证啮合的精度和鼓励流畅运动。
另外,工作负载以及应用温度也会直接影响链轮的摩擦系数,从而影响链轮的运行情况,因此,选材时应考虑材质及其做工,以保证至少1000小时的耐久性,在承受大型负载及高摩擦状态时可维持良好的大部分表现。
总之,设计一款新型的hy-vo齿形链,需要考虑到多个因素,包括啮合的精度,结构刚度,链轮的摩擦系数,以及耐久性和配合等,并且完整的估算及验证所有因素对齿形链性能的影响,以降低风险,实现最佳性能。
齿形链知识简介讲解
外导式
内导式
按啮合机制的不同,可分为外啮合圆销式或滚销式齿形链、内啮合的圆销式或 滚销式齿形链、内-外复合啮合圆销式或滚销式齿形链等
齿形链的分类
2.3 几种应用广泛及最新结构形式和啮合机制的齿形链
1.外啮合圆销式齿形链 外啮合齿形链是链板以外侧齿廓与链轮轮齿接触的齿形链,如图所示。外啮合的特点是:链板的工作 边是外侧直线齿廓,而外侧直线齿廓与链轮轮齿的啮合 定位稳定;不足之处是由于啮合定位是瞬间完成的,因而多边形效应较严重、冲击和振动较大、噪声较 大、磨损较严重。 多边形效应:链传动瞬时传动比在传动过程中是不断变化的,由于刚性链节在链轮上呈多边形分布, 在链条每转过一个链节时,链条前进的瞬时速度周期性的由小变大,再由大变小,链条沿垂直运动方向 的分速度也在作周期性变化,从而导致了运动的不均匀性。这种运动的不均匀性及刚性链节啮入链轮齿 间引起的冲击,必然要引起动载荷。当链节不断啮入链轮齿间时,就会形成不断的冲击、振动和噪声。
齿形链的分类
外啮合Hy-Vo齿形链
4. 还听说有外啮合+内-外复合啮合Hy-Vo齿形链、内-外复合啮合Hy-Vo齿形 链等,但是没有找到相关的资料。
齿形链制作工艺
齿形链零件制作工艺流程图:
序号 1 2 零件名称 导板 链板 制作工序流程图 1.复合模冲裁→2.热处理→3.去氧化膜→4. 抛光→5.上防锈油 1.复合模冲裁→2.热处理→3.去氧化膜→4. 抛光→5.上防锈油 备注
齿形链参数设计
齿形链参数设计
上表是在工程中实用的综合曲率半径。适度增大内-外复合啮合齿形链内侧工 作齿廓的曲率半径,有利于增加同时参与啮合的链轮齿数与链节数,改善链条的 受力状态。 (5)伸出量δ 伸出量δ对链条多边形效应的有影响,δ值大,对减小链条的多边形效应的作 用大。但是如果过大,当相邻的链节转过2π/z角度,在轮齿上啮合就位时,内啮 合无法转为外啮合,当链轮的齿数较多的时候,转过的2π/z角度更小了,这种现 象就会更容易产生。 δ值过小,相邻的链节转角很小的时候就转变为外啮合,减 小多边形效应的功能就降低了。 所以伸出量δ值应该在一个合理的范围内优选。一般δ随着节距增大而增大。 又随着链轮齿数的增加而减小。据桂盟的经验通常可取δ=0.10~0.30mm,节距较 小且链轮齿数较多的时候取较小值,节距较大且齿数较少的时候取较大值。 (6)内侧工作齿廓曲率半径中心坐标x1 、y1 ,当确定了边心距f 、伸出量δ、 内侧工作齿廓曲率半径,当齿形角α =30°时,由链板图可导出:
新型Hy-Vo齿形链异型导板的设计与实验研究

新型Hy-Vo齿形链异型导板的设计与实验研究孟繁忠;曲绍朋;宋婷婷【摘要】在分析导板对新型Hy-Vo齿形链装配与受力影响的基础上,提出可以通过合理设计导板形状及参数的方法有效补偿链条的装配间隙.分析研究了在拉伸过程中不同形状导板的伸长变化量,提出了蝴蝶状导板的设计方法,并通过实验验证了蝴蝶状导板能够使链条在承受较小拉力作用下有效补偿装配间隙,使销轴与工作链板充分接触、共同承载,从而改变新型Hy-Vo齿形链的受力状态.研究结果证明了新的设计方法的合理性,为导板的设计提供了重要依据.【期刊名称】《中国机械工程》【年(卷),期】2010(021)014【总页数】4页(P1660-1663)【关键词】Hy-Vo齿形链;导板变异;连结牢固度;装配间隙;有限元分析【作者】孟繁忠;曲绍朋;宋婷婷【作者单位】吉林大学,长春,130025;吉林大学,长春,130025;日照职业技术学院,日照,276826【正文语种】中文【中图分类】TH132.40 引言新型变节距Hy-Vo齿形链传动是一种低噪声、高效率的传动形式[1],导板作为齿形链的重要组成部分,长期以来在链条行业中未得到足够的重视。
人们大多仅仅通过研究和改进齿形链工作链板的齿形和结构来提高链条的性能,而忽略了导板对链条性能的影响。
在对链条性能要求越来越高的今天,研究导板对链条性能的影响以及合理设计导板参数具有重要意义。
齿形链视导板的布置形式分为内导式齿形链和外导式齿形链两种,新型Hy-Vo齿形链由于结构的特殊性多采用外导式[2]。
本文通过对Hy-Vo齿形链装配与受力影响的分析,结合有限元分析软件,对普通导板的结构型式和尺寸参数进行了变异设计,提出一种新型变异导板,解决了长期以来普通导板在装配和使用过程中的局限性,大大提高了齿形链的性能,并提出了新型Hy-Vo齿形链变异导板的设计方法与原则,为今后此类导板的设计提供指导方法。
1 导板对新型Hy-Vo齿形链装配与受力的影响新型Hy-Vo齿形链一个销轴孔中装有两个长短不同的异型销,如图1所示,只有长销轴与导板连接,短销轴只与链板接触。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第43卷第1期 2007年1月机 械 工 程 学 报CHINESE JOURNAL OF MECHANICAL ENGINEERING Vol.43 No.1 Jan. 2007新型Hy-Vo 齿形链与链轮的啮合分析及其设计方法*孟繁忠1 李启海2 冯增铭2(1.吉林大学链传动研究所 长春 130025; 2.吉林大学机械科学与工程学院 长春 130025)摘要:在分析与计算新型Hy-V o 齿形链变节距特性的基础上,提出“当量边心距”的概念,指出“定位偏置角”的设计原则。
在研究新型Hy-V o 齿形链、链轮、滚刀之间的啮合与滚切原理的基础上,建立三者之间主要参数的谐应关系,提出可用于指导新型Hy-V o 齿形链、链轮及其滚刀设计计算的解析表达式。
试验研究表明,这种新的设计方法是切实可行的。
关键词:新型Hy-V o 齿形链 变节距 当量边心距 啮合原理 链轮滚刀 变位系数 中图分类号:TH1320 前言齿形链是一种应用广泛的重要机械基础件,通常齿形链分为两大类:圆销式齿形链和滚销式齿形链。
当链轮为渐开线齿形时,滚销式齿形链亦常称之为Hy-V o 齿形链(以下简称为Hy-V o 链)。
目前,广泛应用的是圆形基准孔的外啮合Hy-V o 链。
国内外曾有许多文章介绍Hy-V o 链优良的技术特性,文献[1]仅研究了圆形基准孔外啮合Hy-V o 链传动的运动学和静力学特性,并未提出Hy-V o 链主要参数的设计方法。
文献[2-3]虽然分析了圆形基准孔外啮合Hy-V o 链的变节距机理和准共轭啮合机理,但其关于在拉直状态下相邻链板的两圆孔重合的基本假设与实际工况不符,同时文献[2-3]也未提出Hy-V o 链—链轮—滚刀系统主要参数的设计方法。
本文研究一种适用于高速链传动的新型复合啮合机制的Hy-V o 链,在分析和计算其变节距特性的基础上,提出了“当量边心距”的概念,指出了“定位偏置角”的设计原则,提出了可用于指导新型Hy-V o 链、链轮及其滚刀设计计算的解析表达式。
1 新型Hy-V o 链的变节距特性新型复合啮合机制Hy-V o 链的结构型式如图1所示。
这种新型Hy-V o 链的复合啮合机制链节的工作链板的内侧齿廓是由外凸的曲线所构成,而外啮∗ 国家自然科学基金资助项目(50575089)。
20060119收到初稿, 20061025收到修改稿合机制链节的工作链板的内侧齿廓是由内凹的曲线或直线所构成。
因而新型Hy-V o 链在与链轮齿啮入时,外凸的内侧齿廓首先实现与轮齿的接触啮合(内啮合),而后随着啮入过程中相邻链节的相对转动,逐渐实现由内侧齿廓的接触啮合过渡到同一销轴上的相邻链节的工作链板的外侧齿廓的接触啮合(外啮合),从而实现了内—外复合啮合机制,而相邻链节转过2π/Z (Z 为链轮齿数)之后,复合啮合机制链节与外啮合机制链节在链轮轮齿上的定位状态是一致的(均以外侧直线齿廓接触定位)。
图1 新型Hy-V o 齿形链结构示意图1.内—外复合啮合机制链节 2.外啮合机制链节如图2和图3所示,设新型Hy-V o 链工作链板孔的基准圆圆心(非圆形孔的内侧圆弧曲率中心O )之间的距离为A ,异型销轴大端表面的曲率半径为r ,链板孔基准圆圆心至异型销轴大端表面的距离为S m ,异型销轴在链板孔内的定位偏置角为γ。
当新型Hy-V o 链相邻链节相互转动时,两个异型销轴大端表面之间的初始接触点将逐渐上移,而一个异型销轴大端表面上的定点相对于另一个异型销轴大端表面所形成的运动轨迹为外摆线,由于r 1= r 2=r ,则其运动轨迹为心形线[4]。
由图2可求得新型Hy-V o 链在拉直时,其节距为2007年1月 孟繁忠等:新型Hy-V o 齿形链与链轮的啮合分析及其设计方法11712p A B ′=+ (1)式中 1()cos m B r S r γ=+−由图3可导出新型Hy-V o 链在转角为2θ时,其节距增量为()212p B B ′∆=−= ()cos()2()cos cos m m r S r r S r θγγθ+−−⎡⎤−++⎢⎥⎣⎦(2)图2 新型Hy-V o 链节距和当量边心距示意图图3 新型Hy-V o 链节距和当量边心距变化示意图由此可得新型Hy-V o 链在转角为2θ时的节距为22p p p A B ′′′′=+∆=+ (3)计算表明,当0θ=时,其节距增量最小,即min0p ′∆=;当θγ=时,其节距增量最大max2()cos cos m m S p r S r γγ⎡⎤′∆=−++⎢⎥⎣⎦(4) 当0θγ<<时,随着θ的增大,p ′∆在逐渐增大;当θγ>时,随着θ的增大,p ′∆在逐渐减小。
应该指出,定位偏置角γ是新型Hy-V o 链的重要设计参数,它直接影响新型Hy-V o 链的变节距特性,同时,γ的取值应根据新型Hy-V o 链与链轮的啮合定位转角2π/Z 来进行设计。
通常,可取ππ2<<Z Zγ 从而表明了与主、从动链轮齿数Z 1、Z 2的相关性,以满足不同主机和不同工况下个性化的设计需求。
2 新型Hy-V o 链的当量边心距对于圆销式齿形链和圆形孔的Hy-V o 链,其边心距定义为圆形孔的圆心至工作链板外侧直线齿廓的距离。
而对于非圆形孔的新型Hy-V o 链,为了研究其啮合原理与设计方法,则必须提出其“当量边心距”的新概念。
这里,基准边心距定义为基准圆圆心O 点至工作链板外侧直线齿廓的距离f 。
当新型Hy-V o 链处于拉直状态时,O 1点至外侧直线齿廓的距离为当量边心距f 1,转角为2θ时,O 2点至外侧直线齿廓的距离为当量边心距f 2。
应该指出,O 1、O 2点并非异型销轴的啮合接触点,而是O -O 延长线的交点。
由图2和图3可以导出11cos f f B α=−=[]()cos cos m f r S r γα−+− (5)22cos f f B α=−=[]()cos()cos cos m r S r f θγαθ+−−−(6)式中 α——新型Hy-V o 链工作链板的齿形角由式(6)的计算结果可知:当θ=0时,新型Hy-V o 链的当量边心距最大,即f 2, max =f 1;当θ=γ时,新型Hy-V o 链的当量边心距最小,即f 2, min =f −S m cos α/cos γ。
当0<θ<γ时,随着θ的增大,f 2在逐渐减小;当θ>γ时,随着θ的增大,f 2在逐渐增大。
3 新型Hy-V o 链、链轮、链轮滚刀的啮合设计现以图4所示的已经与轮齿啮合就位的内—外复合啮合新型Hy-V o 链为例,阐述新型Hy-V o 链与渐开线齿形链轮及其滚刀的啮合设计方法,而新型图4 新型Hy-V o 链、链轮、刀具齿条啮合示意图机 械 工 程 学 报 第43卷第1期118 Hy-V o 链内侧外凸齿廓曲线的求解及其啮合过程中的动态特性将另文阐述。
虽然文献[5]已经阐述了新型圆销式齿形链、链轮、链轮滚刀的啮合设计方法,但新型Hy-V o 链工作链板与链轮轮齿啮合就位的状态发生了变化,其节距增大,而当量边心距减小,此时其节距和当量边心距分别为p ″、f 2,加工新型Hy-V o 链链轮时滚刀的变位系数[5]为0222ππcot ππ42sin 2tan =−+−f Z x p Zαα (7) 式中 α2 ——滚刀法向齿形角,通常取α2=α2p ——滚刀法向齿距,通常取2p 等于新型 Hy-V o 链的基本节距p ,即2=p pf 0 ——假想的对应于节距为0p (通常取0=p p )时的初始当量边心距02=−∆f f f∆f ——当量边心距增量 以新型Hy-V o 链的基本节距p 为设计基准,则其节距增量为22p A B p ∆=+− (8)当α=30°时,对应于节距增量∆p 的当量边心距增量[5]为πcot 4p f Z ∆⎛∆=−⎜⎝ (9)而此时被加工的新型Hy-V o 链链轮的量柱测量距[6]为cos cos cos πcos cos 2R RBRR BmZ M d mZ M d Z αααα⎧=+⎪⎪⎨⎪=+⎪⎩ 偶数齿奇数齿 (10) 式中 m ——滚刀模数2πp m = αB ——通过量柱中心的渐开线压力角2tan πinv inv cos 2R B d x Z mZ Z αααα=++−d R ——量柱直径应该指出,由于新型Hy-V o 链的复合啮合机制链节的工作链板的内侧齿廓是外凸曲线,因而在新型Hy-V o 链与链轮的啮合设计时,还应进一步通过图4所示的仿真方法来验证链轮轮齿齿廓,特别是齿顶部分是否与链板内侧外凸齿廓相干涉,必要时应对链轮齿顶部分进行修缘或者调整链轮渐开线齿廓参数以及链板内侧外凸齿廓参数。
4 设计计算已知新型Hy-V o 链基本节距p=9.525 mm ,工作链板齿形角α=30°,基准边心距f =5.0 mm ,其工作链板孔基准圆的圆心距A =8.16 mm ,异型销轴大端表面的曲率半径r =7.4 mm ,链板孔基准圆圆心至异型销轴大端表面的距离S m =0.7 mm ,异型销轴在链板孔内的定位偏置角γ=3.667°,则由式(1)计算可得:B 1=0.683 4 mm ,p ′ = 9.526 8 mm 。
(1) 链轮齿数Z =35,压力角α1=30°。
当链节围在轮齿上定位时,θ=π/Z ,则分别由式(2)、(3)、(6)计算可得:B 2=0.700 1 mm ,∆p ′= 0.033 5 mm ,p ″= 9.560 3 mm ,f 2 = 4.394 mm 。
令滚刀法向齿距p 2 = 9.525 mm ,法向齿形角α2=30°,则分别由式(8)、(9)计算可得:∆p =0.035 3mm ,∆f =0.082 8 mm 。
由式(7)计算可得:f 0=4.311 mm ,x = –1.530 1。
当d R =6.0 mm 时,由式(10)计算可得:M R =105.881 mm 。
(2) 链轮齿数Z =37,压力角α1=30°。
当链节围在轮齿上定位时,θ=π/Z ,则分别由式(2)、(3)、(6)计算可得:B 2=0.700 8 mm ,∆p ′= 0.034 7 mm ,p ″= 9.561 5 mm ,f 2= 4.393 mm 。
令滚刀法向齿距p 2=9.525 mm ,法向齿形角α2=30°,则分别由式(8)、(9)计算可得:∆p =0.036 5 mm ,∆f =0.091 4 mm 。
由式(7)计算可得:f 0=4.301 6 mm ,x = –1.521 1。