永磁轮式爬壁除锈机器人控制系统设计
磁吸附爬壁机器人驱动系统设计
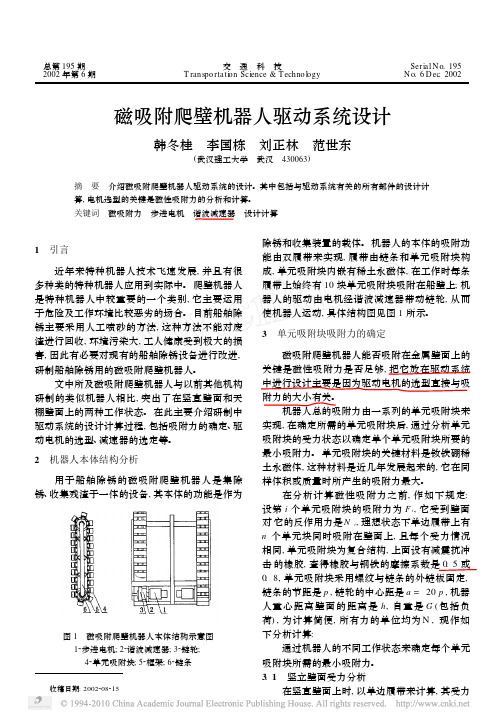
上受到摩擦力很小, 基本上可以忽略不计。
竖直方向上的力平衡方程如下
∑ ∑ F i i
N i-
i
G 2
=
0
即: nF =
G 2
+
nN
N m in = 0 即重力完全由磁吸附力来平衡, 此
时 Fm in =
G。 2n
处于静止时力矩的平衡, 以 A , B 中任意一个
端点A 为支点分析力矩方程, 翻转时 B 处的单元
在分析计算磁性吸附力之前, 作如下规定: 设第 i 个单元吸附块的吸附力为 F i, 它受到壁面 对 它的反作用力是N i, 理想状态下单边履带上有 n 个单元块同时吸附在壁面上, 且每个受力情况 相同, 单元吸附块为复合结构, 上面设有减震抗冲 击 的橡胶, 查得橡胶与钢铁的摩擦系数是 0. 5 或 0. 8, 单元吸附块采用螺纹与链条的外链板固定, 链条的节距是 p , 链轮的中心距是 a = 20 p , 机器 人重心距离壁面的距离是 h, 自重是 G (包括负 荷) , 为计算简便, 所有力的单位均为 N , 现作如 下分析计算:
滨: 哈尔滨工业大学出版社, 1997
总第 195 期 2002 年第 6 期
交 通 科 技 T ran spo rta tion Science & T echno logy
Seria l N o. 195 N o. 6 D ec. 2002
关于旅客集中一舷倾侧力矩计算取值的建议
高文龙
(贵州省船舶检验局 贵阳 550003)
机的输出转矩为M
电
≥M 。 iΓ
由此可得:M 电 ≥MiΓ, 一般情况下选用步进电 机时, 负载转矩和最大静转矩之间的比值通常取
船舶除锈清洗爬壁机器人永磁式履带研究应用
船舶除锈清洗爬壁机器人永磁式履带研究应用随着我国船舶制造业的快速发展,越来越多的船舶需要进行对外保养和修缮。
其中,除锈清洗是维护船舶安全和延长船舶寿命的重要工作之一。
然而,传统的人工除锈方式耗时、效率低,且工人面对高处和狭窄的工作环境,安全性也无法得到保证。
因此,机器人技术在船舶除锈清洗中的应用逐渐受到人们的关注。
机器人除锈清洗技术已经逐渐成熟,并得到了广泛的应用。
机器人除锈清洗具备工作效率高、除锈清洗效果好、工人安全有保障等优点,特别适合应用于高处和狭窄的船舶内部。
目前,机器人技术已广泛应用于个人情况下的除锈清洗,但其应用于船体内部存在很多问题,例如船舶机舱、油舱、货舱等狭小的空间,易积存各种污垢,机器人需要具备针对性的轮式履带才能够满足清洗除锈的要求。
机器人除锈清洗技术主要由机器人、传感器和控制系统三部分组成。
其中,机器人是核心部件,除锈清洗效果和工作效率的好坏,主要取决于机器人的设计。
目前,常用的机器人有轮式机器人、履带机器人、爬壁机器人等类型。
其中,爬壁机器人具备覆盖范围广、可以上下行走、可以上下倾斜、能够越过障碍等优点,特别适合维护狭小空间内的船舶。
然而,传统的爬壁机器人存在能耗高、噪音大,质量重等问题,难以满足应用要求。
为了更好地应对船舶除锈清洗的需求,本文提出了一种永磁式履带爬壁机器人。
该机器人基于永磁驱动,可以实现更高效的动力输出和更稳定的性能。
同时,机器人设计中采用了轻量化和紧凑化的理念,机器人的自重减轻了三分之一。
其履带使用特种材料,可以承受高温和高压,充分保证了其可靠性。
除此之外,该永磁式履带爬壁机器人还集成了传感器和控制系统,可以实现智能控制和遥控操作,简化了工作流程和操作难度。
在实际应用中,该永磁式履带爬壁机器人已经得到了验证和应用。
其除锈清洗效果稳定,工作效率高,能够更好地应对狭小空间的清洗除锈要求。
未来,随着技术的不断革新和机器人领域的快速发展,永磁式履带爬壁机器人将会得到更广泛的应用,为船舶除锈清洗工作带来更多的便利和效益。
壁面清洗机器人爬壁系统设计

壁面清洗机器人爬壁系统设计任务书1.课题意义及目标研究此课题源于社会实际的需求,通过机器人可以降低工人的劳动强度,提高工作效率,特别是提高安全性,在研究此课题的同时深入了解机械方面的知识,设计规范,设计思想,计算方法,将本科阶段的理论知识与生产实际结合,为毕业之后的工作打下牢固的基础。
2.主要任务1)查阅相关资料,根据设计要求确定清洗玻璃壁面的移动机器人的系统组成、结构运行方式。
2)根据设计要求,对设计对象有一总体认识,并通过力学等方面的计算,选取材料,设计其符合要求的机械结构,并根据其运动方式通过PLC设计控制程序。
3)使用CAD二维制图软件,绘制装配图以及零件图。
4)完成毕业论文的撰写。
3.主要参考资料[1] 吴神丽. 新型高楼清洗爬壁机器人的研究与设计[D]. 成都理工大学, 2009.[2] 王妹婷.壁面自动清洗机器人关键技术研究[D].上海大学,2010.[3] 胡启宝.多吸盘式玻璃幕墙清洗机器人本体设计[D].上海交通大学,2007. 4.进度安排审核人:年月日壁面清洗机器人爬壁系统设计壁面清洗机器人可以在建筑物高层不平行于地面的墙壁上对建筑物外层建筑进行清洗操作,本文主要对清洗机器人的爬壁系统进行设计。
该机器人的爬壁设计包含移动系统和吸附系统,其中要实现爬壁操作又必不可少的还要对控制系统进行设计。
其中该机器人主体结构为两块互相垂直的铝板,两块铝板上各安装一个主体框架。
铝板中部由双作用无杆气缸的滑块衔接,气缸两端连接另一块铝板的框架,通过气泵的充放气实现无杆气缸滑块的运动,滑块带动其中一个铝板运动,从而实现机器人移动。
机器人共有四个腿足,各在两个铝板框架两端,腿足上装置普通双作用气缸和吸盘,吸盘提供抓壁力,双作用气缸提供腿足的抬升放下功能。
控制系统采用PLC进行控制,在程序中应用自锁以及互锁以保证机器人运行的安全性和正确性。
关键词:机器人,爬壁,气缸,吸盘,PLCThe design of the climbing system of Wall-climbing robo t Wall- cleaning robot can clean the outer building that the top is not parallel to the ground.This article is mainly to design the cleaning-robot climbing wall system.The robot’sclimbing wall system include the mobile system and the adsorption system,and the necessary is the control system design.In this design,the robot’s major structure is two mutually perpendicular aluminum plate,the each other of the two aluminum plate installs a main body frame.The middle part of the aluminum plate is link up with double-acting rodless cylinder,the cylinder ends is link up with the other frame,through the charge pump is deflated rodless cylinder block movement,the slider to drive one of the aluminum plate movement,which is realize the robot movement.The robot has four legs and feet,which is in the end of aluminum frame,the legs and feet device ordinary double-acting cylinder and the chuck,chuck provide wall force, the double-acting cylinder offer the function that the legs and feet lifting. The control system use PLC to control,in order to ensure the safety and validity of the robot,in the procedure use self-locking and interlocking.The key words: robot,climbing wall ,cylinder ,chuck ,PLC目录1 绪论 (1)1.1选题背景及意义 (1)1.2 国内外研究现状 (1)1.3 研究内容 (5)2 壁面清洗机器人结构设计及零件的选型 (6)2.1研究方案的确定: (6)2.2 机器人总体结构介绍 (8)2.3 壁面清洗机器人材料的选择 (9)2.4 吸盘的选择 (10)2.5 电动机的选择 (11)2.6 联轴器的选取 (12)2.7 本章小结 (14)3 壁面清洗机器人零部件校核计算 (15)3.1铝板的设计与校核 (15)3.2 滚动轴承的寿命计算 (16)3.3 轴的强度校核 (17)3.4 键连接的强度校核 (19)3.5 轴向气缸的设计与计算 (20)3.6 活塞杆的稳定性计算 (22)3.7 本章小结 (24)4 壁面清洗机器人气动设计及控制部分设计 (25)4.1 吸附部分 (25)4.2 气缸的运动 (26)4.3 PLC的概述及发展 (27)4.4 PLC的I/O接口分配 (29)4.5 PLC的选择 (30)4.6 PLC控制面板的设计 (30)4.7 PLC I/O接口设计 (31)4.8 PLC梯形图 (32)4.9 本章小结 (38)结论 (39)参考文献 (40)致谢 (41)1绪论1.1选题背景及意义近几十年来社会不断地发展进步,高楼如今变为了城市化象征的一个重要因素,放眼城市版图,高楼已经是城市建筑的主要旋律。
船舶除锈清洗爬壁机器人永磁式履带研究应用
船舶除锈清洗爬壁机器人永磁式履带研究应用本文将介绍永磁式履带爬壁机器人在船舶除锈清洗领域中的应用与研究。
首先,将简略概括爬壁机器人技术的概念和发展历程;其次,详细探讨永磁式履带爬壁机器人的工作原理与设计结构,包括机器人结构设计原理、控制系统和作业机制;最后,总结永磁式履带爬壁机器人在船舶除锈清洗中的实际应用情况,并展望其未来发展前景。
一、爬壁机器人技术的概念和发展爬壁机器人是指能够在垂直面或倾斜面上行走、停留,具备自我定位、控制、清洗或其他作业能力的机器人。
在船舶除锈清洗领域,爬壁机器人可以利用其高效、灵活和安全的特点,代替手工作业,完成高空、铁锈严重、狭窄、危险等环境下的清洗和作业任务。
同时,爬壁机器人具有连续性和可重复性高的优点,保证了清洗和作业的质量和效率。
爬壁机器人技术的应用和发展可以追溯到20世纪80年代,当时主要用于核电站、石化工厂等工业领域;随着机器人控制、视觉、传感等技术的不断进步,爬壁机器人得到了广泛的应用和推广。
目前,爬壁机器人已经应用于航天、航空、能源、建筑、交通等多个领域,成为机器人技术发展的重要分支。
二、永磁式履带爬壁机器人的工作原理和设计结构1.机器人结构设计原理永磁式履带爬壁机器人的整个结构主要由底盘支架、行走底盘、电机驱动、控制系统和清洗机构组成。
其中,行走底盘是核心组件,通过永磁吸附在船舶表面,实现对船舶表面的行走、停留、作业等功能。
底盘支架可根据不同的船型和工作任务进行调整;电机驱动系统采用无刷直流电机,提供高效、稳定、低噪音的驱动力;控制系统采用微型计算机和传感器,实现对机器人行走、作业等功能的精确控制。
清洗机构可以根据需要配置喷水管、电动刷、吸尘器等工作机构,以满足不同清洗工作的需求。
2.控制系统永磁式履带爬壁机器人的控制系统是实现其行走、停留、作业等功能的关键。
控制系统由微型计算机和传感器组成,可以实现机器人的位置控制和作业控制。
机器人控制系统采用闭环控制系统,主要由机器人本体、控制器、外部传感器和执行器组成。
爬壁清洗机器人设计

爬壁清洗机器人会的不断发展,科学技术的迅猛发展,人类社会的不断进步,现代都市的摩 天大楼越建越多,越建越高,而城市的灰尘污染也越发严重,在这样的背景下,人类需 要依靠升降机平台来逐层地清洗大楼壁面,不但浪费时间和劳动力,而且人类在清洗大 楼壁面的环境越来越恶劣和危险,本课题来自于社会实际的需求,采用爬壁机器人进行 擦洗,降低清洗工人的劳动强度,提高工作效率,特别是提高安全性。如今,在科学技 术领先的国家已经采取了爬壁清洗机器人作为他们的首选工具,用来对大楼外表面进行 清理。
2 爬壁清洗机器人总体结构设计 ---------------------------------- 10
2.1 爬壁清洗机器人的材料选择 ----------------------------------------- 10 2.2 机器人总体结构介绍 ----------------------------------------------- 10 2.3 移动铝板的设计与校核 --------------------------------------------- 11 2.4 吸盘直径的选取 --------------------------------------------------- 13 2.5 电动机的选取 ----------------------------------------------------- 15 2.6 联轴器的选取 ----------------------------------------------------- 18 2.7 轴承的校核 ------------------------------------------------------- 18 2.8 滚动轴承寿命的计算 ----------------------------------------------- 19 2.9 轴的计算 --------------------------------------------------------- 20 2.10 键连接的强度计算 ------------------------------------------------ 21 2.11 轴向气缸的设计与计算 -------------------------------------------- 22 2.12 活塞杆稳定性及挠度验算 ------------------------------------------ 25 2.13 本章小结 -------------------------------------------------------- 28
爬壁机器人控制系统设计

爬壁机器人控制系统设计
于占龙
【期刊名称】《微计算机信息》
【年(卷),期】2010(026)020
【摘要】爬壁机器人属特种机器人的一种,应用于很多领域,而控制系统相当于爬壁机器人的"大脑",决定着爬壁机器人的运动策略.本文针爬壁机器人的控制系统,设计了一种爬壁机器人的控制系统方案.并基于控制方案给出了控制系统的硬件组成,针对轮部控制器进行了软件设计,给出了软件的流程;为了更好的对爬壁机器人路径跟踪进行控制,提出了基于模糊控制策略的机器人路径规划策略.通过试验表明,该控制策略是可行的,有效的.
【总页数】2页(P200-201)
【作者】于占龙
【作者单位】154007,佳木斯大学,计算机系
【正文语种】中文
【中图分类】TP391;TP242
【相关文献】
1.一种基于DSP的爬壁机器人控制系统设计 [J], 吴成东;赵博宇;陈莉
2.基于递阶控制的爬壁机器人控制系统设计 [J], 王吉岱;闫磊;陈广庆;张晓琳
3.基于MEMS微型爬壁机器人自主控制系统设计 [J], 张大伟;李振波;陈佳品
4.非接触船体喷涂爬壁机器人容错控制系统设计 [J], 陈永芳;孙世芳;
5.基于ROS的爬壁机器人控制系统设计 [J], 杨东宇;孙振国;姜萍;于傲然
因版权原因,仅展示原文概要,查看原文内容请购买。
船舶除锈清洗爬壁机器人永磁式履带研究应用
船舶除锈清洗爬壁机器人永磁式履带研究应用船舶除锈清洗是船舶维修中的重要环节,而传统的清洗方法往往耗时耗力,效率低下。
为了提高船舶清洗的效率和安全性,研究出一种永磁式履带机器人来进行船舶除锈清洗工作。
永磁式履带机器人是一种能够在水下自由运动的机器人,它采用强力永磁体作为驱动力,能够在船舶舷壁上自由爬行。
永磁式履带机器人具有以下特点:第一,永磁式履带机器人具有很强的附着力。
机器人的履带上覆盖了大量的永磁体,能够牢牢地附着在船舶舷壁上,并且不易滑脱,保证了机器人在工作时的稳定性和安全性。
第二,永磁式履带机器人具有较高的承重能力。
机器人的履带采用优质的材料制成,具有较强的抗压能力,能够承受较大的重量,可以携带并操作各种清洗工具和设备,满足不同清洗任务的需求。
永磁式履带机器人具有较高的机动性。
机器人采用了先进的控制系统和电动机,能够实现精确的运动控制,能够在船舶舷壁上自由爬行,并且能够适应不同角度和曲面的清洗工作。
永磁式履带机器人除锈清洗船舶的工作原理是通过机器人上的清洗工具,在船舶舷壁上进行清洗作业。
机器人可以搭载各种清洗工具,如刮刀、刷子、高压水枪等,根据具体的清洗任务选择适当的工具进行作业。
机器人可以通过遥控器或者自主导航系统控制,实现对船舶舷壁上不同区域的清洗。
永磁式履带机器人在船舶除锈清洗方面具有广泛的应用前景。
它能够大大提高清洗工作的效率和质量,减少人力资源的浪费。
由于机器人的附着力和机动性较强,能够进行高难度区域的除锈清洗工作,如船舶舷壁的边缘、槽口等。
机器人的使用可以大大提高工作安全性,减少人员的伤亡风险,保护环境。
船舶除锈清洗爬壁机器人永磁式履带在船舶维修中的应用具有重要的意义。
它能够提高清洗工作的效率和质量,减少人力资源的浪费,提高工作安全性。
随着科技的不断发展,相信永磁式履带机器人在船舶维修领域的应用前景将越来越广阔。
船舶除锈清洗爬壁机器人永磁式履带研究应用
船舶除锈清洗爬壁机器人永磁式履带研究应用船舶除锈清洗一直是船舶维护中非常重要的一环,保持船舶表面的清洁和无锈蚀是保证船舶安全和延长船舶使用寿命的关键。
传统的船舶除锈清洗工作需要大量人力和时间,并且存在安全隐患。
为了解决这一问题,近年来,船舶除锈清洗爬壁机器人的研发成为了一个热点。
本文将重点介绍船舶除锈清洗爬壁机器人中的永磁式履带技术及其在船舶除锈清洗中的应用。
一、船舶除锈清洗爬壁机器人船舶除锈清洗爬壁机器人是一种能够在船舶表面自由移动并进行除锈清洗的机器人装置。
相较于传统的人工除锈清洗方式,船舶除锈清洗爬壁机器人具有如下优势:1. 高效:机器人能够在船舶表面自由移动,不受限于人力移动的局限,从而大大提高了除锈清洗效率。
2. 安全:机器人能够代替人工进入狭窄和高危险区域进行除锈清洗,减少了人员伤亡的风险。
3. 节能环保:机器人采用电力供能,减少了对传统燃油能源的依赖,减少了对环境的污染。
4. 数据采集:机器人可以搭载传感器和摄像头,实时采集船舶表面的数据,为船舶维护提供数据支持。
二、永磁式履带技术永磁式履带技术是船舶除锈清洗爬壁机器人中关键的移动技术。
与传统的金属履带相比,永磁式履带具有以下优势:1. 轻巧:永磁材料具有较小的密度,能够在保证强度的情况下实现轻量化设计。
2. 高承载:永磁材料具有较高的磁性,能够实现较高的承载能力,适合用于船舶表面不平整的环境。
3. 省能:永磁材料在无外界磁场的情况下能够保持磁性,不需要额外的能源供给。
4. 静音:永磁式履带在运动过程中不产生摩擦噪音,保持机器人的工作环境安静。
三、永磁式履带在船舶除锈清洗中的应用1. 自由移动:永磁式履带技术能够使机器人在船舶表面自由移动,能够适应不同斜度和曲率的船舶表面,实现全面覆盖的除锈清洗。
2. 精确控制:永磁式履带能够实现对机器人的精确控制,能够在船舶表面进行高效而精准的除锈清洗作业。
3. 数据采集:永磁式履带技术能够实现对船舶表面数据的实时采集,为船舶维护提供数据支持,有助于发现和预防船舶表面的腐蚀和锈蚀问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
永磁轮式爬壁除锈机器人控制系统设计张军梁;张庆华;张小俊【摘要】油罐除锈作业中,存在粉尘弥漫、气源噪音巨大、罐内照明不足等问题,在该环境操作人员进行除锈作业时,对其生命安全带来极大威胁.针对上述问题,研制出对油罐内外壁进行除锈作业的爬壁除锈机器人.首先,针对该类型机器人的技术难点,对机器人爬壁吸附方式进行选型分析.在此基础上,对爬壁除锈机器人的实时控制系统软件概述;并对爬壁除锈机器人主控模块功能进行概述.最后,通过现场实验的方式验证机器人的除锈作业方式.经过多项测试,实验结果表明爬壁除锈机器人能够代替操作人员完成油罐内外表面的除锈作业,极大提高作业效率并有效降低操作风险.【期刊名称】《科学技术与工程》【年(卷),期】2018(018)017【总页数】5页(P217-221)【关键词】石化工厂;除锈机器人;吸附方式;结构设计;控制系统【作者】张军梁;张庆华;张小俊【作者单位】中国石化镇海炼化公司,宁波315207;洛阳圣瑞智能机器人有限公司,洛阳471000;河北工业大学机械工程学院,天津300130【正文语种】中文【中图分类】TP242.3石化企业中,油罐必不可少,其作用是用于存放气态、液态化工原料与产品,这类介质通常具有较强的腐蚀性,容易对油罐的内罐壁产生锈蚀作用,且油罐通常处于室外环境中,风吹日晒雨淋等环境因素导致油罐贮存条件恶劣,油罐的外罐壁极易因锈蚀产生裂纹,存在巨大安全隐患[1—3]。
为保障石化工厂的安全运营,国家标准规定油罐需定期进行除锈处理,通常每罐每4~6年进行整个罐体的内外壁除锈作业。
目前该作业几乎依靠操作人员人工作业,在该过程中,由于人工除锈中采用喷砂工艺,现场气源噪音巨大,粉尘弥漫,该过程中存在毒性残留介质释放,工人作业中必须佩戴密封面罩高空作业,其工作环境十分恶劣[4,5]。
人工除锈作业存在人工操作效率低且危险性高的问题。
综合常见的油罐内外壁锈蚀处理方式,可以分为机械除锈、手工除锈、化学除锈和高压水射流除锈等[6—8]。
前三种除锈方法应用范围较广,具有成本较低的优点,但是在实际应用中,这三种方式大都由操作人员手持专用设备进行除锈作业,除锈效率较低,且长时间进行除锈工作会对操作人员造成一定的身体伤害。
相比于这三种除锈方式,高压水射流除锈技术是一种较新型的除锈技术,目前在国内的应用很少,在国外应用也不甚多,其原理是利用高压水射流对被除锈表面进行高压水喷射,进而达到除去表面锈蚀的目的。
目前高压水射流除锈方式分为两种,分别是人工手持喷枪式和安装于爬壁机器人本体方式。
人工手持喷枪式由人工手持高压水喷枪操作,由于该方式具有一定的后坐力,操作人员手持喷枪无法长时间工作,且喷枪距油罐外壁的距离很难控制,人为因素较大,除锈的效果较差;而在安装于爬壁机器人本体方式中,可移动的爬壁机器人可以用作除锈高压水的载体用来安装固定高压水枪喷头,除锈作业中操作人员可通过遥控器或控制柜远程遥控爬壁机器人在壁面行走进行除锈作业。
随着石化行业的迅速发展与机器人技术的日趋成熟,石化企业对自动化技术的要求也越来越高,研制自动化检测设备以代替操作人员势在必行[9—14]。
本研究设计了一款永磁轮式爬壁除锈机器人,可以代替操作人员完成油罐内外表面的除锈作业,采用爬壁除锈机器人进行油罐内外壁的除锈作业可有效降低操作风险并提高作业效率。
1 爬壁除锈机器人系统概述爬壁除锈机器人由机器人本体、控制系统硬件和控制系统软件三个子系统构成。
其中,爬壁除锈机器人的机械本体由三轮轮式移动平台和三自由度机械臂组成;爬壁除锈机器人的控制系统硬件由控制柜、供电电缆、通信电缆等硬件组成;爬壁除锈机器人的控制系统软件是操作人员控制机器人机械本体的人机交互界面,同时人机交互界面内显示爬壁除锈机器人本体内的传感器信息。
这三个子系统组成完整的爬壁除锈机器人系统。
在实际的作业过程中,操作人员通过遥控器远程遥控,指令通过通信电缆传递至爬壁除锈机器人本体内,驱动各关节位置的伺服电机带动机械本体运动,完成操作人员期望的控制指令。
同时,安装在爬壁除锈机器人本体内的各传感器将其信息显示在“爬壁除锈机器人实时控制系统软件”中。
2 爬壁除锈机器人吸附方式爬壁除锈机器人本体由三轮轮式移动平台和三自由度机械臂组成,爬壁除锈机器人机械本体如图1所示。
论文设计的机器人要完成的主要任务是替代操作人员完成油罐内外表面的除锈作业工作。
参照爬壁机器人研究的国内外发展现状,吸附方式一般分为正负压吸附和磁吸附这三种形式。
图1 爬壁除锈机器人机械本体Fig.1 Wall-climbing descaling robot mechanical body正压吸附原理一般在机器人背部安装螺旋桨,通过旋转的螺旋桨产生一定压力,在反作用力的作用下产生吸附力。
在本研究中,爬壁机器人设计目标是完成油罐的除锈作业,需加装高压水射流喷射装置,所需的能耗较大,不适合在机器人本体上直接安装电池、高压泵等储能设备,需要机器人本体连接控制柜,从地面牵引高压水管、供电通信电缆等管线。
正常工作情况下,随着机器人运动高度的增加,拖缆的质量也在不断地增大,仅依靠正压吸附很难满足设计要求,难以实现足够的吸附力。
负压吸附指用真空泵抽掉负压腔内的空气,在负压腔内产生真空负压力,其原理是依靠负压腔内外的压力差值产生吸附力。
与正压吸附相比较,负压吸附力较大且较稳定。
但是负压吸附方式同样存在很多缺点,如负压吸附方式对吸附的墙面表面质量要求较高,当墙面本身具有较大弧度时,负压腔与墙面间难以形成完整的负压腔,尤其是若这种技术应用于除锈机器人,水射流产生的废水和铁锈容易吸入负压腔,造成涡轮或抽气设备损坏,因而采用负压吸附方式也不适用于除锈爬壁机器人。
本研究设计的爬壁除锈机器人吸附并攀爬的墙壁为油罐的内外壁,采用磁吸附方式可以充分利用该墙壁为钢铁的材料属性,经过多次可行性论证,本研究中采用磁吸附形式最为合适。
按照磁力产生方式的不同,磁吸附方式可以分为电磁和永磁两种吸附形式。
电磁吸附易于根据现场实际需要调节,缺点在于电磁发热量较大,易于损坏,且一旦失去供电,电磁铁吸附力立刻失去,用于爬壁机器人存在很高的危险性。
永磁吸附方式吸附力稳定,持久,牢固,缺点是磁力大小难于与作业方式相匹配。
基于上述论证,项目组最终选择永磁吸附方式,通过理论计算与现场实验的方式,最终选用合适磁力的永磁磁轮,以实现与爬壁除锈机器人除锈作业方式相匹配。
3 爬壁除锈机器人控制系统概述机器人系统中,除机器人结构设计外,控制系统同样十分重要在,本研究中,除锈作业中操作人员可通过遥控器远程遥控或使用鼠标、键盘等通过人机交互界面下达控制指令,指令通过通信电缆传递至爬壁除锈机器人本体内,驱动各关节位置的伺服电机带动机械本体运动,完成操作人员期望的控制指令。
爬壁除锈机器人的控制系统架构方式如图2所示。
图2 爬壁除锈机器人控制系统架构Fig.2 Wall-climbing descaling robotcontrol system architecture爬壁除锈机器人三轮轮式移动平台由一个从动轮(非驱动轮)和两个主动轮(驱动轮)组成,每个主动轮上通过减速器与交流伺服电机相连接,伺服电机提供的动力驱动主动轮转动。
两个主动轮的转速和转向决定了除锈机器人平台的运动轨迹,当两个主动轮的转速不等、转向相同时,除锈机器人平台实现弧形轨迹运动轨迹,因此控制系统控制爬壁除锈机器人三轮轮式移动平台的核心就是控制两个直流伺服电机的转速和转向。
爬壁除锈机器人三自由度机械臂由三个旋转关节组成,通过对单关节的单动,多关节的联动,实现三自由度机械臂的回转与俯仰运动,因此控制爬壁除锈机器人三自由度机械臂的核心就是控制三个直流伺服电机的转速和转向。
4 爬壁除锈机器人控制系统软件主控模块功能概述针对除锈作业任务的具体需求,设计出爬壁除锈机器人控制系统软件。
控制系统软件实现对机器人车体主动轮两个运动轴和机械臂三个旋转运动轴。
主控软件人机交互界面如图3所示。
图3 爬壁除锈机器人控制系统人机交互界面Fig.3 Wall-climbing descaling robot control system interactive interface单轴控制模块实现除锈爬壁机器人的单关节运动控制,在设置运动位置正负限位后,可对爬壁除锈机器人的移动平台两个运动轴和机械臂三个运动轴进行多模式操作。
通过控制系统人机交互界面,实时调整除锈爬壁机器人的运动速度,实现精准控制。
多轴联动模块实现爬壁除锈机器人轮式移动平台的前进、后退和原地转弯运动。
另外,为了方便操作,操作人员也可以使用手持式遥控器完成机器人的除锈作业。
5 实验根据爬壁除锈机器人的设计指标和工作要求,除锈机器人需要具有较快的除锈效率、较高的通过性能和特殊工作位置除锈能力。
根据现场除锈工况,设计研制出第三代爬壁除锈机器人,为验证机器人性能,进行多种工况下的除锈作业。
为验证爬壁除锈机器人的除锈效率,进行大面积除锈实验,该实验是对机器人整体综合性能进行验证。
实验现场照片如图4所示。
图4 爬壁除锈机器人除锈效率实验Fig.4 Wall-climbing descaling robot descaling efficiency experiment实验中采用秒表、皮尺作为实验器具,用以对除锈机器人的除锈作业效率进行计算。
实验开始阶段,将秒表清零,机器人开始除锈作业,秒表开始计时,除锈作业结束后,再次按下秒表,得到除锈作业时间。
再用皮尺测量除锈区域的长度和高度,得到除锈区域的面积,最终得到除锈机器人的除锈作业效率。
为验证爬壁除锈机器人的通过性能,进行喷淋管通过性实验,该实验是对机器人通过性能进行验证。
实验现场照片如图5所示。
图5 爬壁除锈机器人通过性能实验Fig.5 Wall-climbing descaling robot through performance experiment实验开始阶段,操作人员通过遥控器远程操控机器人快速移动至油罐喷淋管附近,然后降低机器人的运动速度,缓慢通过油罐的喷淋管。
通过操作人员观测与摄像机采集的图像相结合的方式,确认机器人与喷淋管间无干涉。
为验证爬壁除锈机器人的特殊工作位置除锈能力,进行加强筋除锈作业,该实验是对机器人特殊工作位置除锈性能进行验证。
实验现场照片如图6所示。
实验开始阶段,操作人员通过遥控器远程操控机器人快速移动至油罐加强筋附近,然后降低机器人的运动速度至除锈工作速度,调整机械臂位姿达到加强圈上方,打开高压水控制开关,进行加强圈的除锈作业。
图6 爬壁除锈机器人特殊工作位置除锈能力实验Fig.6 Wall-climbing descaling robot special working position descaling capacity experiment经过大量性能指标实验测试,除锈机器人具有较快的除锈效率、较高的通过性能和特殊工作位置除锈能力,爬壁除锈机器人满足设计指标和工作要求,能够高效、稳定的进行大面积除锈作业。