二台水泵定时轮换三水位控制装置电路图
多种水位控制电路图
多种水位控制电路图电气自动化2010-01-30 22:32:41 阅读92 评论0 字号:大中小一、自动水位控制器本电路能自动控制水泵电动机,当水箱中的水低于下限水位时,电动机自动接通电源而工作;当水灌满水箱时,电动机自动断开电源。
该控制电路只用一只四组双输入与非门集成电路(CD4011),因而控制电路简单,结构紧凑而经济。
供电电路采用12V直流电源,功耗非常小。
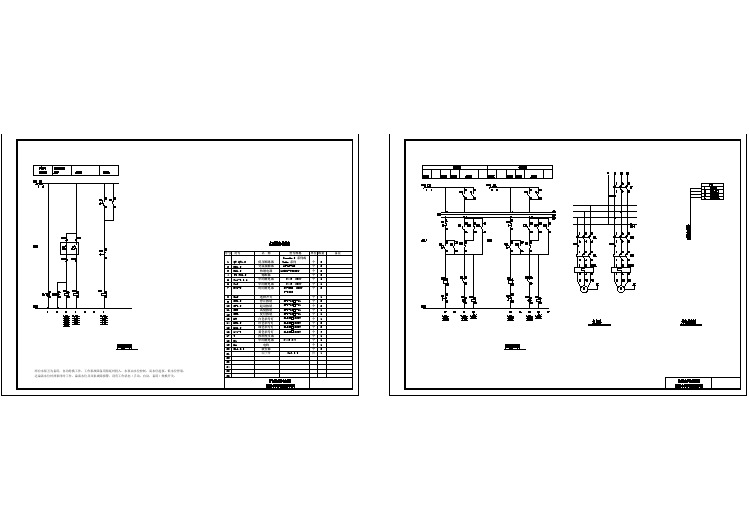
控制器电路如图1所示。
指示器电路如图2所示。
图1是控制器电路图,在水箱中有两只检测探头"A"和"B",其中"A"是下限水位探头,"B"是上限水位探头,12V直流电源接到探头"C",它是水箱中储存水的最低水位。
下限水位探头"A"连接到晶体管T1(BC547)的基极,其集电极连到12V电源,发射极连到继电器RL1,继电器RL l接入与非门N3第○13脚。
同样,上限水位探头"B"接到晶体管T2的基极(BC547),其集电极连到12V电源,发射极经电阻R3接地,并接入与非门N1第①、②脚,与非门N2的输出第④脚和与非门N3的第○12脚相连,N3第①脚输出端接到N2第⑥脚输入端,并经电阻R4与晶体管T3的基极相连,与晶体管T3发射极相连的继电器RL2用来驱动电动机M。
当水箱向水位在探头A以下,晶体管T1与T2均不导通,N3输出高电平,晶体管T3导通,使继电器RL2有电流通过而动作,因而电动机工作,开始将水抽入水箱。
当水箱的水位在探头A以上、探头B以下时,水箱中的水给晶体管T1提供了基极电压,使T1导通,继电器RLl得电吸合N3第○13 脚为高电平,由于晶体管T2并无基极电压,而处于截止状态,N1第①、②脚输入为低电平,第③脚输出则为高电平,而N2第⑥脚输入端仍为高电平,因而N2第④脚输出则为低电平,最终N3第11脚输出为高电平,电动机继续将水抽入水箱。
水泵液位控制电路原理图

西安祥天和电子科技有限公司详情咨询官网主营产品:液位传感器水泵控制箱报警器GKY仪表液位控制系统,液位控制器,无线传输收发器等水泵液位控制电路原理图水泵液位自动控制系统的主要由以下三个部分组成:液位信号的采集液位信号的传输水泵控制系统1.液位信号的采集液位信号的采集主要是选择合适的液位传感器。
液位传感器的发展从最早的电极式、UQK/GSK传统浮子、到现在的压力式、光电式和GKY液位传感器等,形成了多种液位控制方式。
电极式便宜简单,但在水中会吸附杂质,使用寿命短。
传统浮子与相对滑动轨道之间只有1mm 左右的细缝,很容易被脏东西卡住,可靠性较低。
这些是不能在污水中使用的。
光电式也不能用于污水,因为玻璃反射面脏了就会出现误判断。
GKY液位传感器可以弥补这些缺陷,在污水和清水中可以使用。
所以液位控制的系统设计应该根据具体使用环境慎重选择传感器,如果选择不当,将会导致控制系统故障频发,甚至瘫痪,这是导致现有很多液位自动控制系统使用不到一年就失灵的重要原因。
不同液位传感器检测液位的原理是不同的,具体可参见百度文库中“如何选择液位传感器”“什么是液位开关液位开关原理”等文章。
2.液位信号的传输液位信号的传输可以有有线和无线两种方式。
有线就是通过普通电缆线或屏蔽线传输,大部分传统液位传感器通过普通的BV线就可以了,传输信号易受干扰的压力式、电容式传感器需要用屏蔽线传输而且距离不能太远。
在传输距离远或不方便铺设传输线路的场所,需要使用无线液位传输系统。
无线液位传输系统可以有多种方式:第一种是直接采用无线收发设备传输液位信号,如GKY-WX。
第二种是借助于通讯网络的短信收发功能将液位信号传达到目的地,如GKY-DXSF。
第三种是目前最流行一种传输方式,就是借助中间服务器平台,采用流量卡来传输液位信号,如GKY-GPRSSF。
无线液位传输系统具体可参见百度文库中“无线液位控制器”“无线传输液位控制有哪些方式?”等文章。
水位控制电路图水位控制器原理

水位控制电路图水位控制器原理1.本电路能自动控制水泵电动机,当水箱中的水低于下限水位时,电动机自动接通电源而工作;当水灌满水箱时,电动机自动断开电源。
该控制电路只用一只四组双输入与非门集成电路(CD4011),因而控制电路简单,结构紧凑而经济。
供电电路采用12V直流电源,功耗非常小。
控制器电路如图1所示。
指示器电路如图2所示。
图1是控制器电路图,在水箱中有两只检测探头"A"和"B",其中"A"是下限水位探头,"B"是上限水位探头,12V直流电源接到探头"C",它是水箱中储存水的最低水位。
下限水位探头"A"连接到晶体管T1(BC547)的基极,其集电极连到12V电源,发射极连到继电器RL1,继电器RL l接入与非门N3第○13脚。
同样,上限水位探头"B"接到晶体管T2的基极(BC547),其集电极连到12V电源,发射极经电阻R3接地,并接入与非门N1第①、②脚,与非门N2的输出第④脚和与非门N3的第○12脚相连,N3第①脚输出端接到N2第⑥脚输入端,并经电阻R4与晶体管T3的基极相连,与晶体管T3发射极相连的继电器RL2用来驱动电动机M。
当水箱向水位在探头A以下,晶体管T1与T2均不导通,N3输出高电平,晶体管T3导通,使继电器RL2有电流通过而动作,因而电动机工作,开始将水抽入水箱。
当水箱的水位在探头A以上、探头B 以下时,水箱中的水给晶体管T1提供了基极电压,使T1导通,继电器RLl得电吸合N3第○13 脚为高电平,由于晶体管T2并无基极电压,而处于截止状态,N1第①、②脚输入为低电平,第③脚输出则为高电平,而N2第⑥脚输入端仍为高电平,因而N2第④脚输出则为低电平,最终N3第11脚输出为高电平,电动机继续将水抽入水箱。
当水箱的水位超过上限水位B时,晶体管T1仍得到基极电压,继电器RLl吸合。
两台水泵电动机转换工作
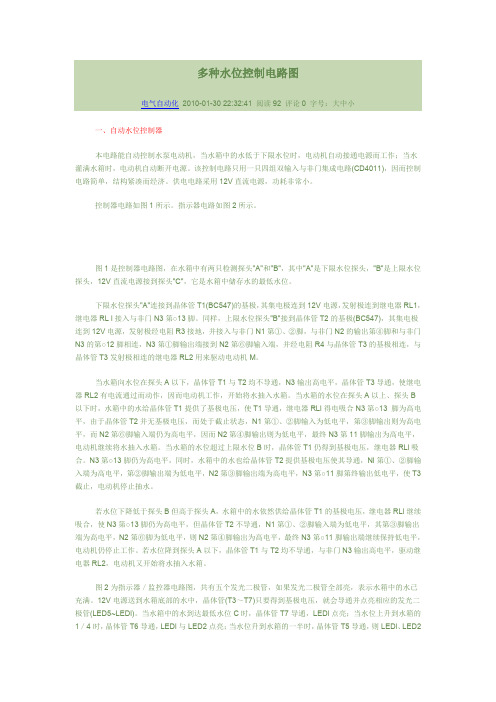
两台水泵电动机转换工作本例介绍的两台水泵电动机转换工作并任意故障自投控制电路(见图190),其特点是在转换开关置于自动位置时,倘若补水罐内压力低至P限时,电接点匠力表sP(1·43)闭合,中间继电器K儿线圈得电吸合.其常开触点(11—15)闭合,接通中间继电器KAI线圈电源,KAI常开触点(15—l 7)闭合自锁;KAI常升触点(29—31)闭合使中间继电器KA3线圈得电并自锁(29—31),I(AI常开触点(7—13)闭合,接通电动机M1控制用交流接触器KM,线阁电源,KM,辅助常开触点(5。
13)闭合白银,KMl三相主触点闭合.水泵电动机MI起动运转;随着补水罐内压力的逐渐提高.当达到电接点压力表亡跟值时,SP(1—45)闭合,K 入线圈得电吸合,此时KA》常闭触点(11—13)断开,切断厂交流接触器KM,线圈回路电源.KMI线圈回路电源,KMl线圈断电释放,其三相主触点断开,水泵电动机MI失电停止运转。
当电动机Ml停止后将作为备用泵使州,也就是说,下一次需要起动的是电动机M:,冉下一次起动的才是电动机M、,两台电动机依次轮流替换工作。
1.1”水泵手动控制将转换开关sA置于1…泵手动位翌,sA(1—3)接通,为I…水泵电动机M1手动控制做准备。
起动时,按下起动按钮5B2(5—7),交流接触器xMl线圈得电吸含义KMl辅助常开触点(i—7)闭合自锁,KMl三相主触点闭合,1:水泵电动机M,得电起动运转。
停止时,则按下停止按钮sBl(3七),切断f交流接触器KM J线圈问路电源,KM?线圈断电释放,KMi 子相主触点断开.1‟系电动机M J失电而停止运转中压变频器。
2.2‟水泵手动控制将转换开关sA置于2‟泵手动位置,S人(1—3;)接通.为2;水泵电动机M2手动控制做冲备。
起动时,按下起动按钮5B.L(37—39),交流接触器KM z线圈得电吸合氏xM z 辅助常开触点(37—39)闭合自锁.xM 2二相主触点闭合,2”水泵电动机Mz得电起功运转。
KB0-CC-45两台互备排(污)水泵自动轮换控制电路图

KB0-CC-43两台互备稳压泵自动轮换控制电路图

水位自动控制器电路图

水位自动控制器电路图目前市售水位控制器大都没有水塔(池)进水指示与保护、报警功能,当水源无水或水泵故障时,不能自动停泵,既浪费电能,又容易烧毁电机。
当水位低于下水位且泵无水时,不能及时停泵报警,提醒用户。
因此,其安全性与可靠性尚有不足。
本文介绍的两种水位自动控制器,都是为解决上述问题而设计的。
图1是S Z K-Ⅱ型水位自动控制器电原理图。
同相器I C3、I C4组成大回差施密特触发器。
R12、C4为积分电路,能有效地消除交流电源引入的干扰。
R14、R13使I C4输出呈施密特特性。
通过水塔地电极与下、上水位电极跟水顺序接触,改变I C3输入电压,实现水位自动控制。
I C1、I C2、I C3的输出共同控制三极管V T1。
V T1导通时,C3放电,I C5输出为负。
V T1截止时,V D7反偏,电源经R10向C3充电,延时开始。
到达延时时间后,I C5输出变正,电路进入保护或报警状态。
延时时间应调整为略大于开泵至水塔有进水所需的时间。
V T1截止有两种情况:1、I C1与I C2输出都为正,即水位在上水位电极以上和进水口仍有水流。
这是专为自来水压力不正常须装加压泵或自来水与井、河水并用的环境而设计的报警。
当自来水压力能自流上水塔时,水满报警,提醒用户关闭水阀。
如果水塔加装水位浮球阀,并使浮球阀关水线在上水位电极上方,则不需报警便能自动控制。
这时应拆去V D5、V D6,并将V T1发射极接电源负极,使I C2输出开路以消除本项报警。
2、I C1、I C2、I C3输出都为负,即水位在上水位电极以下、水泵工作和水抽不(未)上水塔时的状态。
这时,在延时时间内,水塔进水口若有水流,则I C1输出变正,V T1导通;若仍无水流,则I C5输出因C4充电电压上升而变正。
V D8、R15能加速I C5翻转和消除电源波动的影响。
I C5的输出分两路,一路为V T2提供基极电流,产生鸟叫声报警;一路通过V D9加至I C4输入端,使其输出变正,水泵停泵,同时通过R11作用于I C3输入端。
带轮换控系统图