无刷直流电动机的动态仿真
水下机器人的驱动系统仿真--无刷直流电动机仿真

水下机器人的驱动系统仿真--无刷直流电动机仿真(硕士论文)因为导师还没有给我具体的方向,只是让我先了解水下机器人的相关知识。
所以我只是对机器人的整体有个了解,还没有做深入的研究,望老师理解!因此本文首先就自治水下机器人(AUV)的数学模型和三维模型及工作原理等相关知识做了介绍,主要仿真部分是在水下机器人的动力系统。
本文只是选里一个方向的动力推动,其他方向的推动系统没有仿真。
本文把无刷直流电动机作为水下机器人的动力系统,并用simulink对其进行仿真。
1 绪论 (1)1.1研究意义 (1)1.2 AUV的介绍 (1)1.3国内外AUV研究动态 (2)2 水下机器人的总体设计及建模 (4)2.1 AUV 物理模型 (4)2.2 AUV的动力学分析 (6)2.2.1坐标系 (6)2.2.2定义运动参数 (7)2.2.3 受力分析 (7)3 水下驱动系统 (12)3.1 驱动方式的选用 (12)3.2 推力器的组成 (12)3.3 能源供给方式的选用 (13)4 AUV动力装置无刷直流电机驱动系统仿真 (14)4.1 无刷直流电机的基本结构 (14)4.2无刷直流电机的工作原理 (14)4.3 控制策略选择[3] (15)4.4 电动机本体的建模 (16)4.4.1 无刷直流电机的数学模型[4] (17)4.4.2 无刷直流电机本体的建模 (19)4. 5 驱动系统建模 (24)4.5.1 速度控制模块 (25)4.5.2 参考电流模块 (27)4.5.3电流滞环控制模块[7] (29)4.5.4 电压逆变器模块 (30)5 仿真结果及分析......................................................................................... - 32 -5.1 建模仿真参数设定.................................................................................. - 32 -5.2 仿真环境输入值设定.............................................................................. - 32 -5.3 仿真结果及分析...................................................................................... - 32 -5.3.1绕组电流仿真结果............................................................................... - 32 -5.3.2反电动势仿真结果............................................................................... - 33 -5.3.3转过角度及转子位置仿真结果........................................................... - 34 -5.3.4电机转速仿真结果............................................................................... - 35 -5.3.5 输出转矩仿真结果............................................................................... - 36 -6 总结............................................................................................................. - 38 -参考文献......................................................................................................... - 39 -致谢................................................................................................................. - 40 -1 绪论1.1研究意义近年来国外水下机器人技术发展迅速,技术水平较高。
电动汽车无刷直流电机驱动系统实时仿真
制原型或硬件在回路仿真测试。圄4是采用上述电机模型 与dSPACE系统I/O硬件模型建立的无刷直流电机驱动系统 Simulink框圄。圄的下部是
无刷直流电机系统模型,作为实时任劳,模型具有与实 际控制器的硬件接口,可输入6路真实PWM脉冲信号,输 出电机电转矩等模拟信号;上部是控制器模型
,作为实时膜r2,由DSP控制器F240硬件产生PWM,瓶用 PWM信号作为控制器采样定时。变流器采用开关函数建 模方法,测速模型包括数字式增量
直流电机的转子磁极位置信号确定了相电流相位和频率, 转矩指令值确定相电流幅值。电机电动运行时相电流与 相电势同相,因此电动运行时相电流正半波值为
其中fl,f2,f3,f1,f2,f3为磁极位置逻辑信号及其反相 信号。相电流负半波值为相电流全波值为其中=7;/r,为 Im值,7;为7;值。
电机发电运行时,/m*反号,相电流与相电势反相(参见 1)。磁极位置逻辑信号为开发的dSPACE实时系统DS1103, DS1103板插入PC机
主板ISA扩展槽中,由PC机提供电源,所有模型实时计算 都由DS1103独立执行,而dSAPCE试验工具软件则运行在 PC主机上。了dSPACE
系统I/O硬件模型和实时操作系统内核,可从应用系统 Simulink模型自动生成目标系统实时代码。RealTimeInterface还根据信
号和参数产生一个变量文件,由实验工具软件 ControlDesk进行访问。软件ControlDesk的支持下,可以 很快地实现电力驱动系统快速控
,八为电磁转矩和机械负载转矩;/为转子转动惯量。根 据磁极位S信号,由分段线性函数产生每相电势信号。无 刷直流电机基于转子磁极位置进行电子换向,
表现为连续时间与离散事件的混合系统。据上述的数学 模型得到圄2所示的无刷直流电机电气子系统Simulink框 圄。圄中限幅器的限幅值取为1/2,
永磁无刷直流电动机的磁场分析及动态仿真
M a ne i ed An l i nd Dy mi i u ato fPe m a e a e g tc Fi l a yss a na c S m l i n o r n ntM g t n
Br s l s u h e s DC o o M tr
Q A in ,WAN h —o g I N u n —u I N Qa g G S uh n ,X O G G a gy
0 引 言
齿槽 转矩 的 存 在 影 响 了 无 刷 直 流 电机 在 速 度
控制 系统 中 的低 速 性 能 。采 用 磁 性 槽 楔 可 以使 气 隙磁 场波形 更 趋 于 矩形 波 ,减 小 气 隙 磁 阻 的 变化 , 削弱 磁 阻转矩 ,进 而减 小齿 槽转 矩 波动 。
永磁无刷直流电机的Simulink仿真

永磁无刷直流电机的Simulink仿真 对磁悬浮飞轮用无刷直流电机系统进行建模,仿真得到系统工作时各种参数、数据变化趋势和实验结果,能够有效地指导和验证控制系统的设计。
本书采用Mathworks公司的MATLAB作为仿真工具,其中的Simulink是一个用来对动态系统进行建模、仿真和分析的软件包。
使用其中的S-Function模块,结合编写C MEX S-FUNCTION,结合Simulink内含的丰富的数学运算逻辑模块和电力电子模块,能够准确地构造出磁悬浮飞轮用无刷直流电机及其控制模型。
在Simulink中对无刷直流电机仿真建模,国内外已进行了广泛的研究。
电机绕组反电动势波形可采用FFT法和有限元法实现,尽管这种方法得到的反电动势波形比较精确,但结合控制系统仿真时会极大地影响仿真速度。
此外,可以根据能够反映转子位置变化的绕组电感模块来获得反电动势波形,但如果永磁无刷直流电机的相电感极小,转子位置变化引起的电感变化量可忽略,那么该方法对小电枢电感的永磁无刷直流电机的建模并不适用;也可以使用分段线性法实现梯形波反电动势,并采取一些改进的仿真方法实现电机控制系统模型。
但在这些文献中,电机的换相是基于电流滞环控制的,需要三个电流互感器测量三相电流,具体实现时成本较高,开关噪声较大。
另外,在永磁无刷直流电机系统仿真时,应体现出脉宽调制(PWM)的作用。
从仿真结果来看,上述模型基本上还是属于模拟控制系统。
以上这些模型与目前永磁无刷直流电机控制普遍采用的基于数字信号处理器(DSP)的转速、电流双闭环数字控制系统不符合。
本文中系统模型根据实际磁悬浮飞轮用无刷直流电机DSP数字控制系统构建。
实际系统采用TI公司的DSP TMS320LF2407作为主控制器,IR2130作为三相逆变桥的驱动芯片,MOSFET管IRF3710组成三相逆变桥,对直流电源输出的母线电流进行采样,DSP输出6路脉宽调制PWM信号对电机的相电流和转速进行控制。
电动汽车驱动用无刷直流电动机的控制与仿真
控制与应用技术ξEMCA2009,36(1)电动汽车驱动用无刷直流电动机的控制与仿真卫国爱1,2, 全书海1, 朱忠尼2(1.武汉理工大学,湖北武汉 430000; 2.空军雷达学院,湖北武汉 430019) 摘 要:通过对无刷直流电动机(BLDC M)数学模型的分析,建立了BLDC M的动态仿真模型,确定了调速控制系统的结构。
利用MAT LAB7.0/Si m ulink仿真软件,对BLDC M及其双闭环调速控制系统的阶跃响应进行了仿真。
仿真结果表明:BLDC M的机械特性较软,但当其采用了转速、电流双闭环调速控制系统后,电机的机械特性得到了明显改善;另外,它还具有响应快、控制精度高、抗干扰能力强等特点,可满足电动汽车驱动的要求。
试验结果与理论分析相一致。
关键词:无刷直流电动机;电动汽车驱动;控制系统;仿真中图分类号:T M301.2∶T M33 文献标识码:A 文章编号:167326540(2009)0120016204S i m ul a ti on and Con trol of Brushless DC M otor i n Electr i c Veh i cle D r i vesW E I Guo2ai1,2, QUAN Shu2ha i1, ZHU Zhong2n i2(1.W uhan University of Technol ogy,W uhan430000,China;2.A ir Force Radar Acade my,W uhan430019,China) Abstract:The dyna m ic si m ulating model of brushless DC mot or(BLDC M)was established,and its structure of adjust s peed contr ol syste m was confir med by analyzing its mathe matic model,s o it si m ulates the res ponse wave of step input signal of BLDC M and its double cl osed2l oop adjust s peed contr ol syste m using MAT LAB7.0/Si m ulink.The si m ulati on shows that the mechanical characteristic of BLDC M is s oft,but it is i m p r oved after using double cl osed2l oop s peed contr ol syste m.On the side its out put s peed f oll ows input signal changes quickly,and it has better stability and str onger anti2interfere ability.So it suits the de mands of electric vehicle(E V).And the result is consistent with theory.Key words:brushless DC m otor(B LDCM);electr i c veh i cle(EV)dr i ves;con trol syste m;si m ul a ti on0 引 言电动汽车驱动系统的核心装置是电动机及其控制器。
基于ANSOFT的永磁直线无刷直流电动机的仿真研究

Simulation and Analysis of Linear PM Brushless DC Motor Based on ANSOFT
鲁 军 勇 1978 年 6 月 生, 2001 年毕 业 于 武 汉 海军工程大学电气工 程 系, 学 士学 位。 现 为 西 安交通大学电机及其 控 制工程系在读硕士研 究 生。研究方向为直线 电 机设计及其控制。
通电 绕组 A+ CC- B+ B+ AA- C+ C+ BB- A+
( A+ C- ) ( C- B+ ) ( B+ A- ) ( A- C+ ) ( C+ B- ) ( B- A+ ) , 从这里可以看到, 在动子 进行一个周期内, 动子绕组将经过 6 次换相。根 据动子所处位置范围及通电绕组次序, 我们可以 得到逆变器驱动逻辑信号, 如表 1 示。根据表 1, 我们可以利用 MAXSWELL 2D 提供的电路元件搭 构简单的逆变器模型如图 2 所示。驱动电路模型 如图 3 所示。开关 K1~ K6 的通断时机受受控电 压源 V1~ V6 控制。
图 1 逆变器模型
图 2 驱动电路模型
3 系统仿真结果及其分析
本文中 LPMBDCM 的模型 参数如表 2 所示。 电机有 18 个槽, 每极每相是一个槽, 采用双层整 距分布绕组形式。导电方式是两两导通三相星型
六状态。初级是三相线圈, 次级是 N, S 相间的永 磁体。设置粘制摩擦系数 100N s m- 1 , 初级总质 量为 5kg, 电动 机空载起 动。图 4 为 t = 0. 2865s 的电机磁场分布图。利 用 ANSOFT 软件, 我们还 可以得到电机的转速、电磁推力、法向力、相电流、 反电势、磁链、损耗等。图 5 是A 相电流曲线。从 图中可 以看 出当 功率 管轮 换导 通时, A 相 电流 有一个小的波动, 这是由于功率管开关时有上升
无刷直流电动机的数学模型及其仿真
/14
收 稿 日 期 5322BE 2HE 3F
万方数据 h Ch
dhh 每相绕组的自感 ehh 每两相绕组间互感 fhh 微分算子 由 于 三 相 绕 组 为 星 形 连 接.而 且 没 有 中 线.则 有5
b;c b>c bS‘ 2 /14i/34式 联 立 得 5
/34
\[;^ \a 2 2^\b;^ \dEe 2
考虑到在 567869下实现梯形波较为困难(在本
现,
模型中用削去顶 部 的 正 弦 波 来 代 替 梯 形 波(图 %为
567869下 计 算 电 机 : 相 绕 组 的 反 电 势 模 块, 图 %
中(;<= 为 电 角 度 的 正 弦 函 数(> 点 为 正 弦 波 的 正 平 顶 部 分 (? 点 为 正 弦 波 的 负 平 顶 部 分 (@点 为 梯 形 波 的 两 个 平 顶 部 分 的 波 形(A 点 为 正 弦 波 BCD%BCE .FBCD’.BCE%%BCD%4BC部 分 的 波 形(@和 A 点 波 形 的合 成 得 到 削 去 顶 部 的 正 弦 波(G点 为 幅 度 为 .的 削去顶部的正弦 波 形(在 该 波 形 上 乘 以 反 电 势 的 大
参考文献I
J2K李钟明(刘卫国9稀 土 永 磁 电 机 J$K9北 京I国 防 工 业 出 版 社 (2@@@9
电 势 和 电 枢 电 流 (横 坐 标 都 为 时 间 &
JCK陈桂 明(张 明 着9应 用 $*+,*-建 模 与 仿 真 J$K9北 京I科
学 出 版 社 (C3329
J:K邓 兵(潘俊民9无 刷 直 流 电 机 控 制 系 统 仿 真 JLK俊9无 刷 直 流 电 动 机 系 统 的 "=M7NO
无刷直流电机控制系统的仿真
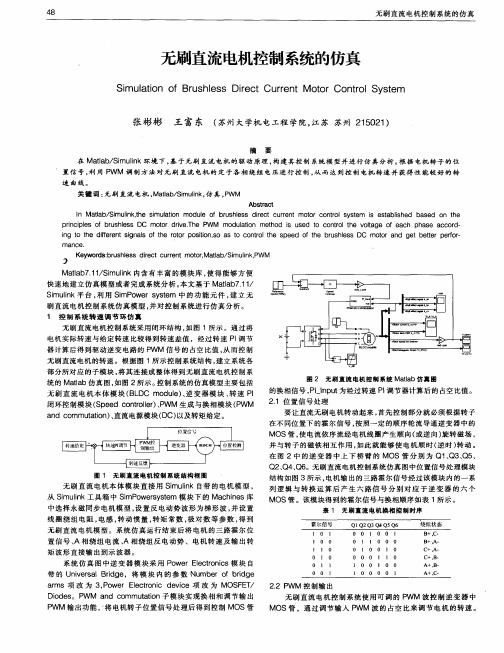
a n d c o mmu t a t i o n ) 、 直 流 电源模 块 ( D C) 以及 转 矩 给定 。
在 图 2中 的 逆 变 器 中 上 下 桥 臂 的 MOS 管 分 别 为 Q1 、 Q 3 、 Q5 、
Q2 、 Q4 、 Q 6 。无 刷直 流 电机控 制 系 统 仿 真 图 中位 置 信号 处 理 模块
无 刷 直 流 电 机 控 制 系 统 的 仿 真
无刷直流电机控制系统的仿真
Si mu l a t i o n o f B r u s h l e s s Di r e c t Cu r r e n t Mo t o r Co n t r o l Sy s t e m
的换 相信 号 , P I — I n p u t 为经 过 转 速 P l 调 节器 计 算 后 的 占空 比值 。 2 . 1 位 置 信 号 处 理 要 让 直流 无 刷 电 机 转动 起 来 , 首先 控 制 部 分 就 必 须 根据 转 子 在 不 同位 置 下 的霍 尔 信 号 , 按 照 一定 的顺 序 轮 流 导 通逆 变器 中 的 MOS管 , 使 电流 依 序 流 经 电 机线 圈产 生 顺 向( 或逆 向) 旋转磁场 , 并 与 转 子 的磁 铁 相 互 作 用 , 如 此 就 能 够 使 电机 顺 时 ( 逆时 ) 转动 。
i n g t o t he di fer en t s i gn al s o f t h e r ot or po s i t i o n, S O as t o co n t r ol t h e s pe e d of t h e b r u s hl es s DC m o t or a n d g e t be t t e r pe r f or —
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
aa ba ca
L L L
ab bb cb
L L L
ac bc cc
=
0 0
0
d ib + dt
ic
ia
ea eb ec
( 4)
其中 V a, b, c 为电机相电压, R a, b, c 为每相电阻, L aa , L ab 为绕组自感和互感, ea , b, c 为三相反电势。 图 2 所示网络图用状态方程来表示, 可列写 如下
55
2 电机及其驱动系统的数学模型
无刷直流电动机及其驱动系统可等效成如图 4 所示网络模型 , 它是由电动机本体, 三相逆变桥 [4 ] 等组成。 电机本体等效为图 4 中所示, 其中绕组为三相星形绕组。 则电机方程 可列写如下
V V V
a b c
[3 ]
Ra
0
Rb
0 0
Rc
ia ibቤተ መጻሕፍቲ ባይዱ+ ic
L L L
第 23 卷第 1 期
2000 年 2 月
合 肥 工 业 大 学 学 报 ( 自然科学版)
JOU RNAL O F H EFE I U N I V ER S IT Y O F T ECHNOLO GY
. 23№1 Vol Feb. 2000
无刷直流电动机的动态仿真
王群京, 孙明施
( 合肥工业大学 电气工程学院, 安徽 合肥 230009)
图 1 局域剖分图 图 2 磁力线分布图
通过二维有限元的求解, 得到各剖分单元节点的矢量磁位值, 进而可得各剖分单元的磁密值 B 。 电 机的磁场能量 W 可由能量密度 W
W
m m
取体积分得到, 能量密度 W
f
m
由 3 部分组成
H dB ∫
Br B
= W
a
+ W
收稿日期: 1999209217 基金项目: 国家 863 主题资助项目 (863- 512- 9803- 01) 作者简介: 王群京 (1960- ) , 男, 博士, 合肥工业大学教授, 硕士生导师.
[1 ]
© 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved.
Abstract: BLDC m o to r, w h ich is w idely u sed in indu st ry con t ro l and hou se app liances, develop s a t a h igh sp eed in recen t yea rs. B u t becau se the m o to r it self con sist s of p erm anen t m agneto r and iron co re,
0 引 言
无刷直流电动机是由永磁同步电动机外接电子线路构成, 在驱动、 伺服系统方面得到了日益广泛的 应用。 本文首先分析了电机及其驱动电路的电网络模型, 通过功率器件和二极管通断状况的变化, 实现 直流无刷电动机系统电网络结构随时间的变化图。 其次建立了时变的网络图的数学模型, 对电动机系统 进行了动态仿真, 其中网络的变化包含了电机所有可能的工作状况。 仿真所需的电动机的反电势由二维 有限元法解得, 电感参数由有限元法结合能量摄动法求得 。 最后给出了详尽的仿真结果。
54
合肥工业大学学报 ( 自然科学版) 2000 年第 23 卷第 1 期
1 电机参数计算
动态仿真参数主要是电机的电感参数和反电势。 反电势由二维有限元计算得到, 为简化起见, 本文 将相反电势波形等效为一正弦波。 电机的电感参数 ( 绕组自感和互感) 是转子位置的周期函数。 由于本 文所研究的直流无刷电动机为三相、 整数槽绕组, 转子磁钢为径向表面结构、 8 极, 所以采用二维有限元 法对电机进行局域剖分。 图 1 所示为剖分图, 图 2 为相对应的磁力线分布图。
a 相绕组自感 L aa a, b 相绕组互感 L
ab
图 3 电感计算结果
© 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved.
第 1 期 王群京, 等: 无刷直流电动机的动态仿真
etc , it becom es very com p lica ted to conduct m odeling and si m u la t ing of system. T h is p ap er, ba sed on
the ana lysis of the ro to r po sit ion va ria t ion s, g ives a genera l sim u la t ion m odel of BLDC m o to r. B y u sing the m odel, t im e 2va rying netw o rk system of BLDC m o to r can be ana lyzed. Pa ram eters requ ired in sim u la t ion a re ob ta ined by 22 D fin ite elem en t m ethod and energy p ertu rba t ion m ethod. T he resu lt s of sim u la t ion a re show n fo r eng ineering design. Key words: b ru sh less DC m o to r; energy p ertu rba t ion; t im e 2va rying netw o rk; dynam ic sim u la t ion
X = AX + BU
α
( 5)
其中 X 是电机三相电流的状态变量矩阵, U 为包 含直流电源和电机三相反电势 ea、 eb、 ec 的矩阵, A 和 B 是与图 2 所示网络图参数有关的时变矩阵。 输出变量 ( 相反电动势, 相电流, 转矩) 可列写 如下
V = GX + H U i = LX + M U T e = ( ea + eb + ec ) Ξ G , H , L 和 M 是时变网络图的函数 。
+ W
p
=
1 BH + 2
∫
0
B
H dB +
( 1)
其中 W a , W
f
和W
p
分别表示空气, 铁心和永磁体中的能量密度。 电机的磁能 W 由各剖分单元求和得到
W = (
6
ea
∃ eaW a +
6
ef
∃ ef W a +
6
ep
∃ epW p )
la
( 2)
∃ e 为三角形单元的面积, la 为电机轴向长度。 电机自感 L j j 和互感 L jk 由能量摄动法表示为 2 L j j = [W ( i j - ∃ i j ) - 2 W + W ( ij - ∃ i j ) ] ( ∃ ij )
D ynam ic s i m ula tion of BLDC m otor
W AN G Q un 2jing, SU N M ing 2sh i
( Schoo l of E lectrical Eng ineering, H efei U n iversity of T echno logy, H efei 230009, Ch ina)
摘 要: 无刷直流电动机 (BLDC M O TO R ) 是近年来发展速度较快的, 在工业控制和家用电器领域应用极广的机电一体化电 动机。但由于电动机本体采用了永磁体, 使得系统的建模和动态分析较为复杂。文章在分析的基础上, 依据变转子位置的磁 场有限元计算, 建立了无刷直流电动机 (BLDC ) 的通用仿真模型, 此模型适用于处理由BLDC 所组成的时变网络系统。 仿真 所需电感参数由二维有限元法结合能量摄动法算得, 最后给出了详细的仿真结果, 供设计人员参考。 关键词: 直流无刷电动机; 能量摄动; 时变网络; 动态仿真 中图分类号: TM 331; T P 391. 9 文献标识码: A 文章编号: 100325060 (2000) 0120053204
L
jk
= [W ( i j + ∃ i j , ik + ∃ ik ) - W ( i j - ∃ i j , ik + ∃ ik ) - W ( i j + ∃ i j , ik - ∃ ik ) +
W ( ij -
( 3) ∃ i j , ik - ∃ i k ) ] ( 4 ∃ i j ∃ ik ) 其中 j = a , b, c 代表电机三相绕组, k = a , b, c, j ≠ k。 W ( i j - ∃ i j ) 表示流过 j 相的电流变化量为 - ∃ i j 时电机的磁能, 余者类推。 由此可得在转子某个位置处的绕组自感和互感值。 电感随转子运动的变化用 [2 ] 二维有限元计算时, 可采用运动边界法 来处理, 从而得到在转子处于不同位置时的剖分图, 进而可求 得在不同转子位置上的自感和互感。 图 3 画出了 360° 电角度范围内的自感和互感曲线, 画圈处表示各转 子位置处的计算值。
[ 参 考 文 献 ]
[ 1 ] N eh l T W , Fouad F A. D eterm ination of satu rated values of ro tating m ach inery increm en tal and app aren t inductances by an energy p ertu rbation m ethod [J ]. IEEE T ran s Pow er A pp aratu s and System s, 1982, 101 (12) : 4 441—4 451. [ 2 ] 唐任远. 现代永磁电机 [M ]. 北京: 机械工业出版社, 1991. 72—73. [ 3 ] Sudhoff S D , K rau se P C. O p erating m odes of the b ru sh less DC m o to r w ith 120 inverter[J ]. IEEE T ran s Energy Conversion, 1990, 5 (3) : 558—564. [ 4 ] T hom as W N eh l, Fakher A Fouad. D ynam ic sim u lation of rad ially o rien ted p erm en t m agnet 2typ e electron ically op erated synch ronou s m ach ines w ith p aram eters ob tained from fin ite elem en t field so lu tion s [J ]. IEEE T ran s on I A , 1982, 18 (2) : 172— 181. [ 5 ] N eh l T W , D em erdash N A. A u tom atic fo rm u lation of m odes fo r sim u lation of the dynam ic p erfo rm ance of electron ically comm u tated DC m ach ines[J ]. IEEE T ran s Pow er A pp aratu s and System s, 1985, 104 (8) : 2 214—2 222. [ 6 ] N yam u sa T A , D em erdash N A. In teg rated non linear m agnetic field 2netw o rk sim u lation of eclectron ically comm u tated p erm anen t m agnet m o to r system under no rm al op eration [J ]. IEEE T ran s Energy Conversion, 1987, 2 (1) : 77—85.