简述有限状态机的分类和区别
有限状态机
1.1概述有限状态机是指输出取决于过去输入部分和当前输入部分的时序逻辑电路。
有限状态机又可以认为是组合逻辑和寄存器逻辑的一种组合。
状态机特别适合描述那些发生有先后顺序或者有逻辑规律的事情,其实这就是状态机的本质。
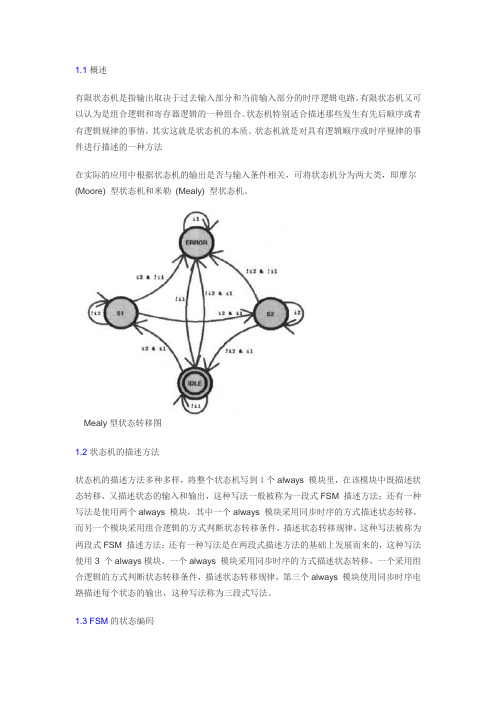
状态机就是对具有逻辑顺序或时序规律的事件进行描述的一种方法在实际的应用中根据状态机的输出是否与输入条件相关,可将状态机分为两大类,即摩尔(Moore) 型状态机和米勒(Mealy) 型状态机。
Mealy型状态转移图1.2状态机的描述方法状态机的描述方法多种多样,将整个状态机写到1个always 模块里,在该模块中既描述状态转移,又描述状态的输入和输出,这种写法一般被称为一段式FSM 描述方法;还有一种写法是使用两个always 模块,其中一个always 模块采用同步时序的方式描述状态转移,而另一个模块采用组合逻辑的方式判断状态转移条件,描述状态转移规律,这种写法被称为两段式FSM 描述方法;还有一种写法是在两段式描述方法的基础上发展而来的,这种写法使用3 个always模块,一个always 模块采用同步时序的方式描述状态转移,一个采用组合逻辑的方式判断状态转移条件,描述状态转移规律,第三个always 模块使用同步时序电路描述每个状态的输出,这种写法称为三段式写法。
1.3 FSM的状态编码二进制码(Binary)和格雷码(Gray)属于压缩状态编码,这种编码的优点是使用的状态向量最少,但是需要较多的逻辑资源用来状态译码。
二进制码从一个状态转换到相邻状态时,可能有多个比特位发生变化,易产生中间状态转移问题,状态机的速度也要比采用其它编码方式慢。
格雷码两个相邻的码值仅有一位就可区分,这将会减少电路中相邻物理信号线同时变化的情况,因而可以减少电路中的电噪声。
Johnson码也有同样的特点,但是要用较多的位数。
独热码(One-hot)指对任意给定的状态,状态寄存器中只有l位为1,其余位都为0。
有限状态机
可综合的设计中应注意
不使用初始化语句;不使用带有延时的描述; 不使用循环次数不确定的循环语句。
应尽量采用同步方式设计电路。
用always过程块描述组合逻辑,应在敏感 信号列表中列出块中出现的所有输入信号。
基于状态机的设计要点
3.状态编码的定义
在Verilog语言中,有两种方式可用于定义状态编码,分别用
parameter和'define语句实现,比如要为state0、state1、state2
、state3四个状态定义码字为:00、01、11、10,可采用下面
两种方式。
方式1:用parameter参数定义
采用一个always模块描述,状态编码用二进制编码:
• module fsm(clk,ina,out); input clk,ina; output out; reg out; parameter s0 = 3'b00,s1 =3'b01,s2 =3'b10,s3=3'b11; reg[0:1]state; always @ (posedge clk) begin state<=s0;out =0; case(state) s0: begin state<=(ina)?s1:s0;out=0; end s1:begin state<=(ina)?s2:s0;out=0; end s2:begin state<=(ina)?s3:s0;out=0; end s3:begin state<=(ina)?s3:s0;out=1; end endcase end endmodule
1、有限状态机
有限状态机的设计
什么是有限状态机( FSM ) FSM的种类和不同点 设计举例
有限状态机(moore mealy)

有限状态机(Finite State Machine )1、有限状态机的基本概念有限状态机是指输出取决于过去输入部分和当前输入部分的时序逻辑电路。
在数字电路系统中,有限状态机时一种十分重要的时序逻辑电路模块,它对数字系统的设计具有十分重要的作用。
有限状态机一般用来描述数字数字系统的控制单元,是许多数字系统的核心部件。
有限状态机由组合逻辑和寄存器逻辑组成。
其中,寄存器逻辑的功能是存储有限状态机的内部状态;而组合逻辑有可以分为次态逻辑和输出逻辑两部分,次态逻辑的功能是确定有限状态机的下一个状态,输出逻辑的功能是确定有限状态机的输出。
在实际的应用中,根据有限状态机是否使用输入信号,设计人员经常将其分为Moore型有限状态机和Mealy型有限状态机两种类型。
⑴Moore型有限状态机其输出信号仅与当前状态有关,即可以把Moore型有限状态的输出看成是当前状态的函数。
其结构框图如图1.图1 Moore型有限状态机的结构⑵Mealy型有限状态机其输出信号不仅与当前状态有关,而且还与所有的输入信号有关,即可以把Mealy型有限状态机的输出看成是当前状态和所有输入信号的函数。
其结构框图如图2.图2 Mealy型有限状态机的结构这两种有限状态机的主要区别在于:Moore型有限状态机仅与当前状态有关,而与输入信号无关。
Mealy型有限状态机不但与当前状态有关,还与输入信号有关。
2、为什么要使用有限状态机♦ 有限状态机克服了纯硬件数字系统顺序方式控制不灵活的缺点。
♦ 状态机的结构模式相对简单。
♦ 状态机容易构成性能良好的同步时序逻辑模块。
♦ 状态机的VHDL表述丰富多样。
♦ 在高速运算和控制方面,状态机更有其巨大的优势。
♦ 就可靠性而言,状态机的优势也是十分明显的。
3、描述有限状态机应该包含的内容⑴至少包含一个状态信号,用来指定状态机的状态。
⑵时钟信号,为有限状态机的状态转换提供时钟信号。
⑶状态转移指定,用于指定有限状态机的状态之间转换的逻辑关系。
有限状态机介绍

2020/8/17
通信软件设计
第13页
控制城门的状态机
2020/8/17
第14页
主要内容
1. 有限状态机的基本概念 2. 有限状态机编程方法
2020/8/17
通信软件设计
第15页
确定的有限状态机
一个DFA M是一个五元组,记作 M = (S, , f, S0, Z),其中 1) S = {状态i},S是一个有限集,其中的每一个元素称为一个状态 2) = {输入字符i},是一个有穷字母表,它的每一个元素称为一个
2020/8/17
通信软件设计
第20页
DoorFSM类
class DoorFSM { public:
enum Event {Lock, Unlock, Open, Close}; // Events protected:
void enterOpened(); void enterLocked(); void enterUnlocked(); void enterClosed(); public: enum States {Closed, Unlocked, Locked, Opened}; // states States doorState; public: DoorFSM() { doorState = Opened; } // Constructor virtual ~DoorFSM() {} // Destructor
有限状态机的作用主要是描述对象在它的生命周期内所 经历的状态序列,以及如何响应来自外界的各种事件。
在现实中,有许多事情可以用有限个状态来表达,如: 红绿灯、电话机等等。 其实,在资讯领域中,很多事情 都是由有限的状态所组成,再由于不同的输入而衍生出 各个状态。
有限状态机

什么是有限状态机FSM简介有限状态机(以下用FSM指代)是一种算法思想,简单而言,有限状态机由一组状态、一个初始状态、输入和根据输入及现有状态转换为下一个状态的转换函数组成。
在Gof的23种设计模式里的state模式是一种面向对象的状态机思想,可以适应非常复杂的状态管理。
现在,FSM被普遍用于搜索引擎的分词、编译器实现和我们普遍关注的游戏开发中。
游戏开发中,通常用FSM实现NPC控制,如当NPC受到攻击时根据健康、力量等选择逃跑还是反攻的行为,一般是用FSM实现的。
FSM的实现方法有很多种,不能简单地说孰优孰劣,但现代开发中,一般都比较推荐面向对象的实现方式:因为可重用性和健壮性更高,而且当需求变更的时候,也有很好的适应性。
实践理论从实践中来,也要回到实践中去。
我们现在通过实例来探索一下FSM的实现吧。
首先假设有这样一个世界(World),世界里只有一台永不缺乏动力的汽车(Car),汽车是次世代的,没有油门方向盘之类的落后设备,只有两个互斥的按钮——停止(Stop)和行进(Run),随着时间的流逝,汽车根据驾驶员的操作走走停停。
下面的代码可以实现这种功能:while True:key = get_key() # 按下什么键if key == "stop":stop(car)elif key == "run":go(car)keep(car) # 保持原态完成了功能而且直观、简洁的程序员万岁!但这时候客户(策划或者玩家)觉得走走停停太没意思了,他们想要掉头、左转和右转的功能,我们就要在while 循环里增加更多的if...else分支;他们想要更多的车,我们就要要在每一个分枝里增加循环;他们不仅仅想要Car了,他们还要要玩Truck,这时我们就需要在分枝的循环里判断当前的车是否支持这个操作(如Truck的装卸货物Car 就不支持);他们……这个while循环终于无限地庞大起来,我们认识到这样的设计的确是有点问题的,所以我们尝试用另一种方法去实现FSM。
有限状态机

7.4 有限状态机设计有限状态机(Finite State Machine)是一种时序机,它源自于人们将一个复杂的问题分割成多个简单的部分来处理的思想。
状态机通过时钟驱动下的有多个状态,以及状态之间的跳转规则来实现复杂的逻辑,一旦当前的状态确定,也就明确了相关的输入输出。
有限状态机主要分为两个类型:第一类,如果输出只和当前状态有关而和输入无关,称之为Moore状态机;第二类,输出不仅和当前状态有关也和输入有关,称之为Melay型状态机。
本节将主要介绍这两类状态机、状态编码以及使用VHDL和Verilog语言描述的设计范例。
7.4.1 Moore状态机Moore状态机的输出仅仅取决于当前的状态而与其输入无关,一个典型Moore机的状态转换图如图7-17所示。
图7-17 Moore机状态转换图图中的状态机包含S0、S1、S2和S3共四个状态,使用闭合的圆圈标识;状态S0时的输出为1,所以标识为“S0/1”;圆圈之间的箭头以及文字表明了状态跳转的方向,X是状态机的输入。
从图7-17中可以明显的看出Moore机的输入只是改变了状态改变的方向,当前的状态唯一决定了状态机的输出。
清单7-14中的使用典型的“两段式”状态机描述,时序状态转换进程在时钟的控制下推动状态机运行,组合逻辑判别进程负责根据不同的状态确定输出、并根据输入确定状态跳转方向。
清单7-14 Moore型状态机-------------------------------------------------------------------- VHDL-- MooreFSM.vhd-- The Moore FSM Logic Descriptionlibrary ieee;use ieee.std_logic_1164.all;use ieee.numeric_std.all;entity MooreFSM isport(clock : in std_logic; --时钟nrst : in std_logic; --异步复位X : in std_logic; --数据输入Dout : out std_logic --数据输出);end entity MooreFSM;architecture rtl of MooreFSM istype states is (S0,S1,S2,S3); --定义状态attribute Encoding : string;-- 定义状态编码为one-hot编码attribute Encoding of states: type is "0001 0010 0100 1000";signal Current_state : states ; --现态signal Next_state : states ; --次态begin--时序状态转换进程process(nrst,clock)beginif nrst = '0' thenCurrent_state <= S0;elsif clock'event and clock = '1' thenCurrent_state <= Next_state;end if;end process;--组合逻辑判别进程process(nrst,X,Current_state)beginif nrst = '0' thenNext_state <= S0;Dout <= '0';elsecase Current_state iswhen S0 =>if X = '0' thenNext_state <= S0;elseNext_state <= S1;end if;Dout <= '0';when S1 =>if X = '0' thenNext_state <= S1;elseNext_state <= S2;end if;Dout <= '1';when S2 =>if X = '0' thenNext_state <= S0;elseNext_state <= S3;end if;Dout <= '1';when S3 =>if X = '0' thenNext_state <= S3;elseNext_state <= S0;end if;Dout <= '0';end case;end if;end process;end architecture rtl;//------------------------------------------------------------------ Verlog // MooreFSM.vhd// The Moore FSM Logic Descriptionlmodule MooreFSM(clock,nrst,x,dout);input clock; // 时钟input x; // 输入input nrst; // 异步复位output dout; // 输出reg dout;reg [3:0] next_state; // 次态reg [3:0] current_state; // 现态// 定义状态编码为one-hot编码parameter [3:0] S0 = 4'b0001,S1 = 4'b0010,S2 = 4'b0100,S3 = 4'b1000;//时序状态转换进程always @ (posedge clock or negedge nrst) if(!nrst)current_state <= S0;elsecurrent_state <= next_state;//组合逻辑判别进程always @ (current_state,x)begincase (current_state)S0 : begindout = 1'b0;if(x)next_state <= S1;elsenext_state <= S0;endS1 : begindout = 1'b1;if(x)next_state <= S2;elsenext_state <= S1;endS2 : begindout = 1'b1;if(x)next_state <= S3;elsenext_state <= S0;endS3 : begindout = 1'b0;if(x)next_state <= S0;elsenext_state <= S3;endendcaseendendmoduleModelSim得到的仿真波形图如图7-18所示。
简述有限状态机的分类和区别

简述有限状态机的分类和区别
有限状态机是一种用于描述系统行为的数学模型,可以分为两种类型:确定性有限状态机和非确定性有限状态机。
确定性有限状态机是指在给定的输入条件下,每个状态只能有一种确定的下一步状态,因此它的转移函数是确定的。
而非确定性有限状态机则允许在给定输入条件下,一个状态可以有多种可能的下一步状态,因此它的转移函数是非确定的。
此外,有限状态机还可以分为Moore型和Mealy型。
Moore型的输出只依赖于当前状态,而不依赖于输入;而Mealy型的输出则同时依赖于当前状态和输入。
总之,有限状态机的分类和区别主要体现在其转移函数和输出函数的确定性和依赖关系上。
在实际应用中,选择适合的类型可以更好地描述和控制系统行为。
- 1 -。
状态机
代码分析 (续)
• • • • • • • • • • • • • process(next_state) begin case next_state is when st0 => led <="1111"; when st1 => led <="1110"; when st2 => led <="1101"; when st3 => led <="1011"; when st4 => led <="0111"; when others => led <="1111"; end case; end process; -------------------------end V1;
有限状态机的作用
• 有限状态机是数字逻辑电路以及数字系统 的重要组成部分,尤其应用于数字系统核 心部件的设计,用来实现高效率高可靠性 的逻辑控制。
有限状态机的分类
• 在实际的应用中,根据有限状态机是否使 用输入信号,设计人员经常将其分为Moore 型有限状态机和Mealy型有限状态机两种类 型。
代码分析 (续)
• • • • architecture V1 of FSM is TYPE states IS (st0, st1, st2, st3, st4); SIGNAL next_state: states; begin
代码分析 (续)
• • • • • • • • • • • • • • • • • • • • • • • • • • process(rst,clk) begin if rst='0' then next_state <= st0; else if clk'event and clk='1' then case next_state is when st0 => if key="1110" then next_state<=st1; else next_state<=st0; end if; when st1 => if key="1101" then next_state<=st2; else next_state<=st1; end if; when st2 => if key="1011" then next_state<=st3; else next_state<=st2; end if; when st3 => if key="0111" then next_state<=st4; else next_state<=st3; end if; when st4 => if key="1110" then next_state<=st1; else next_state<=st4; end if; end case; end if; end if; end process;MooFra biblioteke型有限状态机
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
简述有限状态机的分类和区别
有限状态机是计算机科学中的一种数学模型,用于描述系统的状态转换行为。
根据状态转换的规则和方式,可以将有限状态机分为两类:确定性有限状态机和非确定性有限状态机。
确定性有限状态机(Deterministic Finite Automaton,DFA)
指的是状态转换是唯一的,即在任何时候,从任何状态出发,只要读入相同的输入符号,都会到达同一个状态。
这种状态机的状态转换图是一个有向无环图,每个状态只有一个后继状态。
非确定性有限状态机(Nondeterministic Finite Automaton,NFA)指的是状态转换不唯一,即在某些情况下,从同一状态出发,
读入相同的输入符号,可能会到达不同的状态。
这种状态机的状态转换图是一个有向图,每个状态可能有多个后继状态。
在实际应用中,有限状态机还可以根据状态的数量、输入符号的类型、输出符号的类型等进行分类。
例如,根据状态数量的不同,可以将有限状态机分为有限自动机和无限自动机;根据输入符号的类型,可以将有限状态机分为确定性和非确定性的输入符号型有限状态机等。
总之,有限状态机是一种非常重要的计算机模型,能够描述许多复杂的系统行为。
了解有限状态机的分类和区别,可以更好地理解和应用它们。
- 1 -。