根据异步电动机转速公式
表示三相异步电动机转速与转矩之间关系的机械特性公式
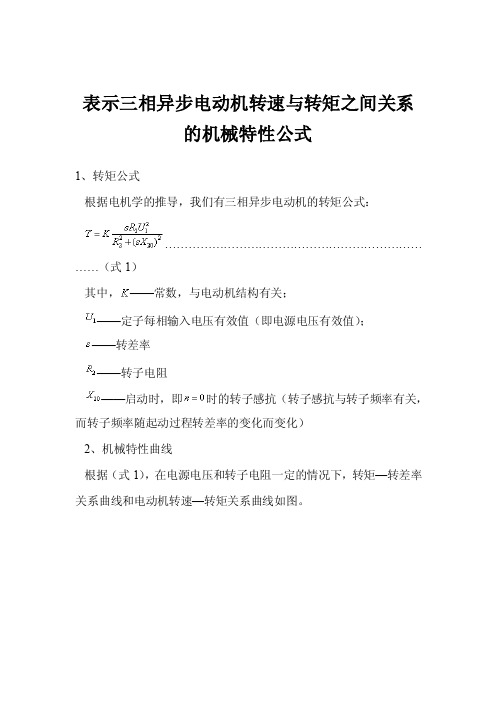
表示三相异步电动机转速与转矩之间关系的机械特性公式1、转矩公式根据电机学的推导,我们有三相异步电动机的转矩公式:………………………………………………………………(式1)其中,——常数,与电动机结构有关;——定子每相输入电压有效值(即电源电压有效值);——转差率——转子电阻——启动时,即时的转子感抗(转子感抗与转子频率有关,而转子频率随起动过程转差率的变化而变化)2、机械特性曲线根据(式1),在电源电压和转子电阻一定的情况下,转矩—转差率关系曲线和电动机转速—转矩关系曲线如图。
图1 三相异步电动机机械特性曲线上图就是三相异步电动机的机械特性曲线。
3、特征转矩(1)额定转矩经推导,电动机的输出转矩T为:…………………………………………………………(式2)其中,——负载转矩(取决于外力)/;——电动机轴上输出的机械功率/;相应地,额定转矩为额定工作状态下电动机的输出转矩:………………………………………………………………………(式3)其中,——电动机铭牌上标示的额定功率,亦即额定输出机械功率;——额定转速。
(2)最大转矩机械特性曲线中的即是最大转矩。
当时,取到,根据(式1):………………………………………………………………………(式4)由机械特性曲线不难发现,当负载转矩超过最大转矩时,电动机就带不动负载了,发生“闷车”现象,此时电动机电流增大六七倍,严重过热后烧坏。
因此,电动机过载应小于最大转矩,且时间尽量短。
作为电动机的又一重要参数,设电动机过载系数,对于三相异步电动机而言,过载系数一般取为1.8~2.2。
(3)起动转矩在机械特性曲线中,时的转矩为起动转矩,根据(式1),有……………………………………………………………………(式5)。
多速异步电动机的控制(双速)系列教程._2

主电路3个接触器KM1、KM2、KM3 主触头和热继电器KH1、KH2,FU1熔 断器组成。
当接触器KM3主触头闭合时,把双速电动 机M的定子绕组3个首端U1、V1、W1短 接;接触器KM2主触头闭合,双速电动机 M的定子绕组3个首端U2、V2、W2接电源 L3、L2、L1,即是双速电动机M绕组接为 YY形,电动机以高速运行。
时电动机将会反转,产生很大的冲击电流。
(2) 另外,电动机在高速、低速运行时的额定电流不相同。因此,热继电器KH1 和KH2要根据不同保护电路分别调整整定值,不要接错。
双速异步电动机的控制线路
6、课后练习与思考
练习:
试分析时间继电器控制双速电动机的控
制线路工作原理
书(p196)
双速异步电动机的控制线路图
分 断
分 断
线解
KM2
圈 除 电动 KM3
失 自 机M 电 锁 失电
线圈 得电
KM2 KM2 KM3 KM3 主触 常闭 头闭 触头 合 分断
对
KM1 联锁
电动 机M 接成 YY形 高速 起动 运行
KM1 KMKK2MM32 KKMM3 3
双速异步电动机的控制线路图
3)停止
按下SB3
SB3常闭触头分断 切断对KM1、KM2 KM3控制回路
双速异步电动机的控制线路图
(2) 分析主电路。
注意的是:双速电动机在高速、低速运行时的额定电流不相同。因此,
热继电器KH1和KH2要根据不同保护电路分别调整整定值。
这些事情, 我怎忘了
哈哈!我考虑 到了哦
双速异步电动机的控制线路图
(3) 分析控制电路工作原理。
双速异步电动机的控制线路图
(3) 分析控制电路工作原理。 合上电源开关QS 1) △形低速启动运转
异步电机转差计算公式

异步电机转差计算公式异步电机是一种常见的电动机类型,其工作原理是通过电磁感应产生转矩。
在异步电机中,转差是一个重要的参数,用于描述电机的运行状态。
转差是转子转速与旋转磁场的差值,它直接影响电机的性能和效率。
异步电机转差的计算公式如下:转差率(s)= (同步速度(Ns)- 实际转速(N))/ 同步速度(Ns)在这个公式中,同步速度是根据电源频率和极对数计算得到的,实际转速是电机实际运行时的转速。
通过计算转差率,我们可以了解到电机的负载情况、效率以及功率因数等重要参数。
转差率的计算公式是根据电机的运行原理和电磁学原理推导出来的。
在电机运行时,定子绕组中的电流会产生旋转磁场,而转子中的导体条会受到旋转磁场的作用,产生感应电动势。
根据找速定律,转子会受到感应电动势的作用而转动,但转子的转速永远不能达到同步速度,因为存在转差。
转差率是一个无量纲的比值,通常表示为百分数或小数。
当转差率为0时,表示电机达到了同步速度,此时电机处于最佳工作状态。
而当转差率为100%时,表示电机完全停止运转,此时电机无法产生转矩。
转差率的大小直接影响到电机的性能和效率。
通常情况下,转差率越大,电机的效率越低,转差率越小,电机的效率越高。
因此,在实际应用中,我们需要根据具体的工作要求和效率要求来选择合适的转差率。
除了转差率,还有一些其他与转差相关的参数,如转差功率、转差角等。
转差功率是指电机在转差状态下产生的功率,它与转差率成正比。
转差角是指旋转磁场与转子导体条之间的夹角,它是一个与转差率相关的参数。
在实际应用中,我们可以通过测量电机的转速和电源频率,然后利用转差率的计算公式来计算电机的转差。
这样可以帮助我们了解电机的工作状态,并对电机的性能进行评估。
异步电机转差是描述电机运行状态的重要参数,通过转差率的计算公式可以得到电机的转差。
转差率的大小直接影响到电机的效率和性能。
在实际应用中,我们需要根据具体的要求来选择合适的转差率,以达到最佳的电机工作状态。
三相异步电机极数和转速的计算方法
三相异步电机极数和转速的计算方法日常工作中,遇到一台三相异步电机,往往这样问,这台电机是几极的?比如是2极、4极、6极、8极……然后可以通过它的极数判断它的额定转速。
那么电机的极数和转速有什么关系呢?电机的极数是指每相线圈在定子圆周内均匀分布的磁极数。
磁极都是成对出现,N极和S极,所以一台电机的极数最少是2极。
级数越多,转速越低,极数越少,转速越高。
转速和极数的关系可通过公式:n=60f/p计算。
n:转速。
60:60秒,我们平时所说的这台电机的转速多少,是指这台电机每分钟旋转的周数,也就是 60秒旋转的周数。
f:电网频率,我国为50HZ。
p:电机极对数,2极电机,对数是1;4极电机,对数是2;8极电机,对数是4。
比如一台2极电机,转速n=60秒×50HZ/极对数1=3000转。
但这是同步转速,异步电机,转子转速低于定子旋转磁场转速,所以,异步转速还涉及到电机转差率的因素,转差率=(定子转速-转子转速)/定子转速,不同厂家生产的电机转差率也不同,通常在10%以内,一般在4%左右。
异步转速和转差率关系:N=(60F/P)×(1-S%),所以2极电机异步转速=3000×(1-4%)=2880转左右。
同样算法,6极电机异步转速=(60秒×50赫兹/极对数3)×(1-转差率4%)=960转左右。
电机极数在电机型号中就可以体现,比如电机型号:Y100L-6,就是6极电机。
电机铭牌如果需要鉴定退出运行的无铭牌电动机的极数,可采用剩磁法进行判断,方法如下:将一只毫伏表(或毫安表)接到三相定子绕组任一相的引出线上,并在转轴的初始位置作好标记,然后用手慢慢地盘动转子一周。
由于电动机铁芯中有剩磁,当转子转动时,定子绕组中就会产生交流电流,于是接在定子绕组中的毫伏表指针就会偏转,如果仪表双向刻度,则指针偏离零位的次数就是电动机的极数;如果仪表单向刻度,则指针偏离零位的次数就是电动机的极对数。
三相异步电动机转速计算公式

三相异步电动机转速计算公式三相异步电动机在咱们的日常生活和工业生产中那可是相当常见的,您要是对电工学、电机学或者相关领域稍有了解,就肯定知道它的重要性。
今天咱就来好好聊聊三相异步电动机转速的计算公式。
先来说说三相异步电动机的工作原理。
简单来讲,就是通过三相交流电在定子绕组中产生旋转磁场,然后这个旋转磁场与转子导体相互作用,从而使转子转动起来。
那这转速到底咋算呢?咱们有个常用的公式:n = 60f / p × (1 - s) 。
这里面的“n”表示的就是电动机的转速,单位是转每分钟(r/min);“f”呢,是电源的频率,在咱们国家一般是 50 赫兹;“p”指的是电机的磁极对数;“s”则是电机的转差率。
比如说,有一台三相异步电动机,电源频率是 50 赫兹,磁极对数是 2,转差率是 0.05。
那咱们来算算它的转速:首先,60×50÷2 = 1500 ,然后 1500×(1 - 0.05) = 1425 转每分钟。
您瞧,是不是挺简单的?我还记得有一次,在一个工厂里维修设备的时候,就碰到了一台转速不太正常的三相异步电动机。
那台机器负责带动一条生产线的运转,可突然之间,速度就慢了下来,产品的质量和产量都受到了影响。
当时我就赶紧去查看,第一步就是要搞清楚它的转速是不是符合正常的计算值。
经过一番仔细的测量和计算,发现原来是磁极对数出了问题,有一组磁极损坏了。
所以说,掌握这个转速计算公式,对于解决实际问题那可是相当有用的。
不管是在设备的选型、故障的排查,还是在优化系统性能方面,都能给咱们提供重要的依据。
再给您详细解释解释这公式里的每个部分。
电源频率“f”,就像人的心跳一样,稳定而规律,咱们国家一般就是 50 赫兹,很少有变化。
磁极对数“p”,这可就决定了电机的基本特性,磁极对数越多,转速就越慢。
转差率“s”呢,它反映了电机的实际运行状态和理想状态之间的差异。
总之,三相异步电动机转速计算公式虽然看起来有点复杂,但只要您多琢磨琢磨,多结合实际情况去运用,就会发现它其实并不难。
三相异步电动机转速公式

三相异步电动机转速公式
三相异步电动机的转速公式是三相异步电动机的重要运作参数
和关键部件,它可以用来计算电机的转速,有助于更好地控制和驱动电机。
因此,我们需要了解三相异步电动机转速公式。
首先,我们来了解一下三相异步电动机的简单原理。
三相异步电动机是一种利用相交极化原理来实现旋转的电动机,它的主要组成部分由滑轮、分励器、永磁体、电容器、控制系统和外壳组成。
电动机的转子上装有三极,其极数与其构造形式有关,也就是根据该电动机的构造而定。
滑轮通过励磁线圈控制电动机转子上的极磁,以及永磁体来调节转子的方向,以使转子不断旋转。
其次,我们来看一下三相异步电动机转速公式。
其转速公式可以由下面的数学模型表示:
begin{equation} n=frac{60f}{P} end{equation}
其中,n表示转子转速,单位为转/秒(rpm);f表示电源的交流频率,单位为Hz;P表示滑轮的极数,一般为2,4,6,8…以上。
最后,当改变电动机的转速时,要特别注意以下几点:首先,正常的电动机转速范围一般在1400~3600rpm之间,但在实际应用中,其转速范围也可以有所改变;其次,当改变电动机转速时,也要注意电源电压的变化,以免损坏电动机;最后,异步电动机的转速比较低,所以在选择电动机时,要根据负载容量及技术要求来选择,以确保负载性能。
由此可见,三相异步电动机转速公式是一个重要的运作参数,它
可以用来计算电动机的转速,有助于更好地控制和驱动电机。
同时,在改变电动机转速时,也要注意电源电压的变化,以免损坏电动机。
此外,电动机的极数也会影响转速,所以在选择电机时,也要根据实际情况选择最合适的转速。
三相异步电动机效率计算公式

三相异步电动机效率计算公式三相异步电动机是一种常见的电动机,它的效率计算是电机性能评价的重要指标之一。
本文将详细介绍三相异步电动机效率计算公式,希望对爱好电机学习的读者有所帮助。
首先,我们先来了解一下三相异步电动机的类型。
三相异步电动机是一种最常见的交流电机,它由固定部分和转子部分组成。
根据转子类型的不同,三相异步电动机可以分为两种类型:鼠笼式异步电动机和绕线式异步电动机。
鼠笼式异步电动机和绕线式异步电动机在结构上有所不同,但它们的效率计算公式是相同的。
计算电机效率的公式是:η = Pout / Pin × 100%其中,η表示电机的效率,Pout表示电机输出的有用功率,Pin表示电机输入的总功率。
在三相异步电动机中,电机的输入功率可以通过以下公式计算:Pin = √3 × V × I × cos(φ)其中,V表示电机的额定电压,I表示电机的额定电流,φ表示电机的功率因数。
电机的输出功率可以通过以下公式计算:Pout = 2 × π × n × T / 60其中,n表示电机的转速,T表示电机的输出扭矩。
需要注意的是,这些公式中的一些参数需要通过实际测试获得。
例如,电机的额定电压和电流可以从电机的额定功率、额定电压和额定效率推算出来;而电机的输出扭矩和转速可以通过测量电机输出端的力矩和转速得出。
三相异步电动机的效率是电机性能评价的重要指标之一,它不仅关系到电机的能效,也影响到电机的使用寿命和运行稳定性。
通过使用上述公式进行计算,可以更加准确地评估电机的性能和优化电机的使用。
关于异步电机转差率以及转速公式的商榷

关于异步电机转差率和转速公式的商榷屈维谦(未经作者许可,请勿转载、引用)2012-6-1关键词转差率 转速 因果逻辑 理想转速 同步转速 定义式 公式 转子无源摘要 转差率11n n n s -=是人为的定义式,而且,按照数学和因果逻辑,只能转速决定转差率,相反的转差率决定转速是不成立的。
电机学的异步电机转速式)1(601s pf n -=是由转差率的定义式变换导出,不仅违背了数学和因果的逻辑,而且定义式也不可能成为公式。
分析表明,在通常的转子无源条件下,转子损耗率δ是产生转差率s 的根源,转差率则是转子损耗率的转速表达。
转差率可以由转子功率平衡方程式推导而表达为公式,且有s n n n P P P em M em =-=-=11δ,转速的计算公式则为)1(601δ-=p f n ,虽然该式与定义式)1(601s p f n -=“巧合”,但二者却有本质的区别。
异步电机转速计算公式的意义在于转速数值的计算,并未虑及电机的运行正常与否。
指导异步电机调速的应为转速的物理公式,本文对此作了简单介绍。
绪言在电机学中,转差率s 是异步电机极为重要的变量,异步电机的工作原理、运行状态基本是围绕转差率进行分析,而且异步电机的主要性能和参数无不和转差率密切相关。
然而,转差率的作用如此之大,却只是一个人为定义产生的数学变量,而不是客观存在的物理量,其中的道理不免令人困惑费解。
重要的问题是,以转差率s 作为异步电机运行标志以及由s 的定义式衍生的异步电机转速表达式并不和实际完全相符,例如,按照电机学的异步电机理论:当s>0 或 n<n 1 时,异步电机为电动状态;当s<0 或 n>n 1 时,异步电机为发电或制动状态;但是异步电机在双馈和内馈控制时,却既有s<0,n >n 1的超同步电动运行,同时也有s >0,n <n 1的亚同步发电运行,这一事实表明,以转差率判定异步电机运行状态的结论起码不具有普适性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
根据异步电动机转速公式:n=(1-s)n0=(1-s)60f/p,
通过改变定子电压频率f1、极对数p以及转差率s都可以实现交流异步电动机的速度调节,具体可以归纳为变极调速、变转差率调速和变频调速三大类,而变转差率调速又包括调压调速、转子串电阻调速、串级调速等,它们都属于转差功率消耗型的调速方法,当电源频率f 一定时,若改变电动机定子绕组的磁极对数P,就可使电动机转速改变。
采用双速电机可改善机床的调速性能,简化变速机构,因此在车、铣、镗床中都有应用。
常见的双速电动机的绕组有两种接线方式:Δ/YY 及Y/YY。
1.Δ/YY接法
图a)为双速电动机Δ/YY接法电路图。
当绕组的1、2、3号出线端接电源,而使4、5、6号出线端悬空时,电机绕组接成三角形,每相绕组中有两个线圈串联,成四个极,电动机低速运转;当把1、2、3号端子短接,4、5、6号端子接电源时,则绕组为双星形,每相绕组中两个线圈并联,成两个极,电机作高速运转。
由此可知,电机从Δ接法的低速运转变成YY接法的高速运转时,转速升高一倍,而功率只增加15%,所以这种调速方法可近似地看成恒功率调速。
它很适合一般金届切削机床对调速的要求。
2.Y/YY接法
图b)为Y/YY接法,当电机转速增加一倍(YY接法)时,输出功率也增加一倍,属于恒转矩调速。
它适用于电梯、起重机、皮带运输机等要求恒转矩调速的场合。
3. 控制电路
图2.25为常用的双速电动机Δ/YY调速控制电路图,其中:KM1得电为低速,KM2得电为高速,KM3为短接接触器。
图a)用两个复合按钮SB2及SB3分别控制KM1及KM2、KM3,实现低速与高速的直接转换而无需经过停止状态。
图b)是用转换开关SA来选择低速或高速方式后,由按钮SB2发令启动电动机的控制电路。
图c)转换开关SA选择高、停、低速。
当选择高速时,采用时间继电器KT,按时间原则自动控制电动机低速起动、经延时后转换到高速运行。
上述三个控制电路中,低速与高速之间都用接触器动断触头互锁,以防短路故障。
功率较小的双速电动机可采用图a)和图b)的控制方式;容量较大的双速电动机,宜可采用图c)的控制方式。
4. 电路说明:当按下起动按钮SB2,主电路接触器KMl的主触头闭合,电动机三角形连接,电动机以低速运转;同时KA的常开触头闭合使时间继电器线圈带电,经过一段时间(时间继电器的整定时间),KMl的主触头断开,KM2、KM3的主触头闭合,电动机的定子绕组由三角形变双星形,电动机以高速运转。
5.用万用表判断各绕组是否烧坏应在电机接线盒处将6个绕组抽头(1.2.3.4.5.
6.下面用D1~D6)从接线柱上拆开,并做好标记,然后用万用表的二极管测试档或者低电阻档分别测试D1-D2、D2-D3 、D3-D1端以及D4-D5、D5-D6、D6-D4之间的电阻值,用二极管测试档会显示导通,低电阻档会显示阻值非常低几乎没
有,就只能说明电机个绕组没有断线的,且中性点连接良好。
再用二极管档分别测试D1、D2、D3与D4 D5 D6之间的阻值,如果显示不导通,或者电阻档阻值无穷大则说明绕组之间没有短路的情况。
然后再分别测试六个绕组抽头与电机外壳之间的阻值,如果显示不导通,或者电阻档阻值无穷大则说明各个绕组没有对地短路的情况。
一般来说电机的绕组阻值会很小,通常用万用表测量只能看一个大概,具体阻值是否平衡还要用电桥测试。
6.双速异步电动机控制电路改用PLC控制
梯形图工作原理:按设于外部的启动按钮SB3,接通了第一梯级母线侧常开接点X000,电流(能流)通过串接其后的X002、Y001的常闭接点接通了输出继电器线圈,同时接通与M0常闭接点相串的定时器
线圈T0(K值为40)。
由于Y000线圈的闭合,使其并接母线一侧的Y000常闭接点闭合,Y000线圈形成了自保。
由于Y000线圈的闭合,使接于其后的外部接触器KM1动作,电动机处于低速启动状态(即处于三角接法)。
Y000线圈闭合的同时,定时器T0即开始计时。
计时时间一到,接于第三梯级母线一侧的T0常开接点闭合,通过串接其后的X002常闭接点,接通输出继电器Y001线圈闭合。
由于Y001线圈的闭合,并接于母线一侧的Y001常开接点闭合,Y001线圈形成了自保。
在这同时(Y001线圈的闭合)串接于第一梯级的常闭接点断开,切断了由Y000线圈所控制的KM1接触器的运行。
在Y001线圈的闭合的同时,第四梯级的母线侧Y001常开接点闭合,通过串接其后的常闭接点X002,接通了输出继电器Y002。
在输出继电器Y001闭合时,接于其后的外部接触器KM2闭合。
KM2将电机绕组头U1、V1、W1接成了星点,而输出继电器Y002外部所接的接触器KM3则接通了电源使电动机处于高速运行状态。
停止,则按外接按钮SB1,各梯级所串接的X002常闭接点断开,使电动机在任一运行状态均可停止。
这是低速启动,高速运行的过程。
低速运行时,按外接启动按钮SB1,此时第二梯级接于母线一侧的X001闭合,电流(能流)则通过串接于其后的X002接通中间继电器M0线圈,使并接于母线一侧的M0常开接点闭合,使M0中间继电器线圈形成了自保。
由于M0线圈的闭合,使第一梯级第二支路母线一侧的M0常闭接点闭合,同时切断了定时器线圈T0的运行,使电流接通了Y000输出继电器,外接的接触器KM1接通使电动机处于三角形低速运行状态。
停止,则按外接按钮SB1即可。
这就是低速运行过程。
注意:本梯形图未设置热保护,从原图来看热保就少用了一个。
可在梯形图第一梯级Y001常闭接点后串接X003,同时在第四梯级X002常闭接点后串接X004。