智能轮椅的研究现状和发展趋势
智能轮椅研究现状及发展趋势
2008年3月30日 《机器人技术与应用》 10 引言 随着社会老龄化进程的加快以及由于各种疾病、工伤、交通事故等原因造成下肢损伤的人数的增加,为老年人和残疾人提供性能优越的代步工具已成为整个社会重点关注的问题之一。
智能轮椅作为一种服务机器人,具有自主导航、避障、人机对话以及提供特种服务等多种功能,可以大大提高老年人和残疾人的日常生活和工作质量,使他们重新获得生活自理能力和融入社会成为可能。
目前,世界各国的研究者都在广泛开展智能轮椅相关技术的研究。
作为机器人技术的一种应用平台,智能轮椅上融合了机器人研究领域的多种技术,包括运动控制、机器视觉、模式识别、多传感器信息融合以及人机交互等等。
经过20多年的研究和开发,智能轮椅的交互性、自主性以及安全性都得到了很大的发展。
本文旨在对目前智能轮椅的国内外研究现状、关键技术及其发展趋势进行介绍。
1 智能轮椅的国内外研究现状 智能轮椅通常是在一台标准电动轮椅的基础上增加一台电脑和一些传感器或者在一个移动机器人的基础上增加一个座椅进行构建。
最早的相关研究开始于1986年,轮椅通过视觉进行导航协助。
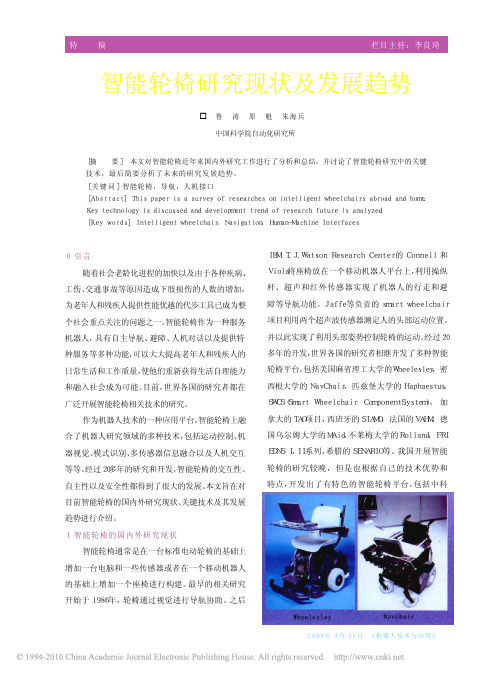
之后IBM T.J.Watson Research Center的Connell 和Viola将座椅放在一个移动机器人平台上,利用操纵杆、超声和红外传感器实现了机器人的行走和避障等导航功能。
Jaffe等负责的smart wheelchair项目利用两个超声波传感器测定人的头部运动位置,并以此实现了利用头部姿势控制轮椅的运动。
经过20多年的开发,世界各国的研究者相继开发了多种智能轮椅平台,包括美国麻省理工大学的Wheelesley, 密西根大学的NavChair,匹兹堡大学的Haphaestus,SWCS(Smart Wheelchair ComponentSystem), 加拿大的TAO项目,西班牙的SIAMO, 法国的VAHM, 德国乌尔姆大学的MAid,不莱梅大学的Rolland, FRIEDNS I,II系列,希腊的SENARIO等。
智能轮椅调研报告

智能轮椅调研报告智能轮椅调研报告一、引言智能轮椅是将现代科技与传统轮椅结合的一种新型产品,它以人工智能技术为核心,实现了轮椅自动化、智能化控制,提供更加便捷、安全和舒适的出行体验。
智能轮椅的出现,不仅为行动不便的人群提供了更好的生活方式,也为社会的无障碍出行做出了贡献。
本报告旨在对智能轮椅进行调研,并分析其发展趋势和市场前景。
二、智能轮椅的运行原理与功能智能轮椅通过搭载传感器、控制系统和电动驱动器等设备,实现了自动导航、避障、平衡稳定等功能。
其中,传感器主要用于感知环境信息,控制系统则负责分析处理传感器数据,并根据需要控制电动驱动器进行相应的动作。
智能轮椅的主要功能如下:1. 自动导航:智能轮椅可以利用激光导航、摄像头图像识别等技术,对周围环境进行感知,并根据预设的路线进行自主导航。
2. 避障与防撞:智能轮椅内置传感器可以检测到前方障碍物,并通过控制电动驱动器实现避免碰撞。
3. 平衡稳定:智能轮椅采用了先进的平衡控制技术,可以保持水平平衡,提供乘坐者更加稳定的行驶体验。
4. 人机交互:智能轮椅配备了触摸屏、语音识别等人机交互设备,使得操作更加便捷,乘坐者可以通过语音或触摸屏控制轮椅的行进和停止。
三、智能轮椅市场现状及发展趋势目前,智能轮椅市场主要集中在发达国家,如美国和日本等。
在这些国家,智能轮椅已经广泛应用于医院、养老院和个人家庭等场所。
而在我国,随着老龄化进程的加快以及人们生活水平的提高,智能轮椅市场也开始逐渐崭露头角。
未来智能轮椅市场的发展趋势主要有以下几点:1. 技术创新:随着人工智能和机器学习等技术的不断发展,智能轮椅的性能和功能将不断提高,为用户提供更加便捷、安全和舒适的出行体验。
2. 多元化需求:随着用户需求的不断变化,智能轮椅的种类和功能将日益多样化。
例如,一些用户可能需要长时间坐在轮椅上,因此对座椅舒适性和体位控制的要求会更高。
3. 社会支持:智能轮椅的普及和推广需要社会的支持和认可。
2024年轮椅市场前景分析

轮椅市场前景分析引言轮椅是一种康复辅助设备,为行动不便的人群提供了自主移动的能力。
随着人口老龄化和残疾人口增加,轮椅市场发展迅速。
本文将对轮椅市场的前景进行分析,以探讨该市场的潜力和未来发展趋势。
市场规模和增长趋势根据统计数据,全球轮椅市场规模逐年增长。
这可以归因于人口老龄化、残疾人群需求增加以及医疗技术进步等因素。
根据预测,未来几年内,轮椅市场规模将继续扩大。
市场驱动因素轮椅市场的增长得益于以下几个主要驱动因素:1.人口老龄化:随着人口老龄化程度加深,行动不便的老年人数量增加,对轮椅的需求也相应增加。
2.残疾人群增加:由于交通事故和慢性疾病等原因,残疾人口不断增加,他们需要轮椅来帮助移动。
3.医疗技术进步:轮椅的设计和制造技术不断改进,使得轮椅更加舒适、便捷和耐用,满足用户的需求。
4.政府支持和政策倡导:政府对残疾人群体的关注度增加并出台相关政策,为轮椅市场提供了良好的发展环境。
市场竞争态势轮椅市场竞争激烈,主要厂商之间展开了激烈的竞争。
目前市场上存在着大型国际公司和小型本地公司。
大型公司通过产品创新、品牌建设和全球渠道拓展等手段提高市场占有率,而小型公司则通过灵活的生产制造和价格优势来与大型公司竞争。
市场前景展望轮椅市场前景广阔,潜力巨大。
随着科技的进步和社会的关注度提高,轮椅的设计和功能将不断创新。
对于企业来说,应关注以下趋势:1.高端轮椅市场:随着人们对于生活品质和舒适需求的提高,高端轮椅市场有望迎来快速增长。
2.科技驱动:轮椅将更多地利用科技创新,例如智能轮椅和机器人辅助等,以提供更好的用户体验和便利性。
3.可持续发展:随着环保意识的提高,市场对于绿色和可持续发展的轮椅产品需求也将增加。
结论轮椅市场作为康复辅助设备市场的重要组成部分,具有巨大的发展潜力。
市场规模逐年扩大,竞争也越来越激烈。
未来,随着科技创新和社会需求的不断增长,轮椅市场将进一步拓展。
企业应抓住市场机遇,不断更新产品技术,提高竞争力,以在市场中占据一席之地。
智能轮椅的研究现状与发展趋势

智能轮椅的研究现状与发展趋势
字数够用
一、研究现状
智能轮椅是智能技术与物理康复技术领域的新兴应用,它是一种能够
自主行走和掌握环境的智能康复技术,能够帮助残疾人恢复行走能力,让
残疾人得以安全、舒适、自主地完成室内外的实际行为。
智能轮椅的应用具有广阔的前景:1)可以帮助残疾人恢复行走能力,使长期依赖他人进行行动的残疾人实现更加自主的行动。
2)通过智能轮椅,可以增强残疾人对周围环境的操控能力,让残疾人能够参与到室内外
的社会活动当中,提高残疾人的生活质量。
3)智能轮椅可以实现更少负
担的移动,为残疾人提供更舒适、更安全的环境。
至今,人们经过大量研究,取得了一些成果,主要表现在以下几个方面:
1)轮椅机器人技术的发展。
近年来,智能轮椅机器人技术发展迅速,出现了相应的动作控制系统,悬浮控制系统,智能辅助导航系统等,为残
疾人的移动提供新的便捷方式。
2)嵌入式系统和传感器技术的发展。
嵌入式系统可以实现智能轮椅
的多功能控制,传感器技术可以检测室内外环境变化,使智能轮椅更好地
适应环境变化。
中国智能轮椅的发展现状及发展趋势分析报告

中国智能轮椅的发展现状及发展趋势分析报告摘要
随着智能科技的快速发展,智能轮椅已经受到了广泛的关注,它主要是为了满足残障人士及老年人及其他无力行走的人们而设计的。
本文分析了中国智能轮椅的发展现状,介绍了智能轮椅的类型,其关键技术及发展趋势。
本文还探讨了中国智能轮椅的发展问题,提出了改善建议。
本文的研究结果表明,未来智能轮椅将发展出更多的功能和更多的类型,以满足不同人群的需求,改善智能轮椅的控制、安全性和灵活性也是需要关注的重要问题。
关键词:智能轮椅;中国;现状;发展趋势
1绪论
近年来,由于技术的迅速发展,智能轮椅的研发和应用也变得越来越普及。
智能轮椅主要是为了满足残障人士及老年人及其他无力行走的人们而设计的,在其功能上比传统的轮椅更加强大,也更加便捷。
中国正在迅速发展智能轮椅技术,但是它们存在着一些问题,像是价格高,技术相对落后等,因此,深入了解中国智能轮椅的发展现状及发展趋势,对发展中国智能轮椅产业和推进智能轮椅技术的普及具有重要的现实意义。
2中国智能轮椅发展现状
截至目前,中国智能轮椅市场已经发展起来。
2024年轮椅市场发展现状
2024年轮椅市场发展现状概述轮椅是一种帮助行动不便人士进行日常活动的辅助设备。
随着人口老龄化和残障人士数量的增加,轮椅市场在全球范围内得到了快速发展。
本文将探讨当前轮椅市场的发展现状。
市场规模根据统计数据,预计到2025年,全球轮椅市场规模将达到100亿美元。
这一庞大市场的增长主要受到老年人口增加和残障人士数量增长的驱动。
除了传统的手动轮椅,市场上还出现了电动轮椅和智能轮椅等创新产品,进一步推动了市场的发展。
技术创新近年来,轮椅市场涌现出许多技术创新。
电动轮椅的出现大大提高了残障人士的自主性和生活品质。
同时,智能轮椅将传感器、无线通信和自动控制等技术应用于轮椅设计中,实现了智能化的功能,如自动转向、避障和族群交互等。
这些技术创新不仅为用户提供了更多选择,也推动了轮椅市场的进一步发展。
市场竞争由于轮椅市场的巨大潜力,吸引了众多厂商进入竞争。
市场上存在着大量的品牌和产品,包括传统的医疗设备制造商和新兴的科技企业。
这些企业通过提供不同特点的产品以满足不同用户的需求来竞争市场份额。
此外,价格竞争也是市场竞争的一个方面。
市场趋势随着科技的不断进步,轮椅市场将呈现出一些明显的趋势。
首先,智能轮椅的发展将更加注重用户体验和功能丰富性。
其次,轻量化和折叠式设计将成为市场的趋势,方便用户携带和存储。
此外,可持续发展也是轮椅市场的重要关注点,以减少对环境的负面影响。
市场挑战尽管轮椅市场前景广阔,但仍面临一些挑战。
首先,高价格是一大限制因素,使得一些消费者难以购买高质量的轮椅产品。
其次,一些市场上存在的低质量产品给消费者带来了安全隐患。
此外,政策和法规的限制也成为市场的挑战之一。
市场前景随着全球老年人口和残障人士数量的增加,轮椅市场有望继续保持快速发展。
随着技术创新的推进和市场竞争的激烈,预计轮椅产品将变得更加智能化、轻量化和功能丰富化。
此外,随着可持续发展意识的增强,市场还将关注环保和可持续性的问题。
总体而言,轮椅市场具有广阔的前景,将为行动不便人士带来更好的生活质量。
2023年智能轮椅行业市场分析现状

2023年智能轮椅行业市场分析现状智能轮椅是一种结合了电子技术和智能化技术的医疗设备,旨在提供便利和舒适的移动方式给行动不便的人群,如老年人或残疾人。
随着老龄化人口的增加,智能轮椅市场逐渐兴起并得到了广泛的关注。
以下是对智能轮椅市场现状的分析。
1. 市场规模和增长潜力智能轮椅市场规模逐年增长,预计在未来几年仍将保持良好的增长势头。
这主要受以下几方面因素的影响:- 老龄化人口的增加:随着人们寿命的延长,老年人口的比例逐渐增加,这导致了对于便捷移动设备的需求增加。
- 残疾人群体的增加:由于事故、疾病等原因,残疾人群体也在增加,对于智能轮椅等辅助设备的需求也在不断增加。
- 技术的进步和创新:随着技术的不断进步和创新,智能轮椅的功能和性能不断提升,进一步推动了市场的发展。
2. 市场竞争格局和主要参与者目前智能轮椅市场存在着较多的参与者,主要包括医疗设备制造商、科技公司以及创业公司等。
其中,一些大型医疗设备制造商具有技术和资源上的优势,这使得他们能够在市场上占据较大的份额。
同时,一些创业公司也在市场上崭露头角,他们通过技术创新和定制化服务来满足不同用户的需求,与传统医疗设备制造商形成了一定的竞争。
3. 市场发展趋势和前景- 技术创新:智能轮椅市场受到技术创新的推动,各种先进的技术如机器视觉、人工智能、生物力学等被应用于智能轮椅中,提高了其适应能力和用户体验。
- 定制化需求:随着用户需求的多样化,市场上涌现出越来越多的定制化智能轮椅,满足不同用户的个性化需求。
- 无人驾驶技术:随着无人驾驶技术的发展,智能轮椅也有望实现无人驾驶,提供更加智能、便利的服务。
总的来说,智能轮椅市场前景广阔。
随着老龄化程度的进一步加深,以及技术创新的不断推动,智能轮椅市场有着巨大的发展潜力。
然而,市场竞争也将变得更加激烈,企业需要不断创新和提升产品性能,满足用户需求,并且与其他参与者展开有效的竞争。
2024年智能轮椅市场需求分析

2024年智能轮椅市场需求分析智能轮椅是一种通过集成感应、自动控制和智能系统等技术,对传统轮椅进行升级改造而来的产品。
智能轮椅的出现,极大地改善了残疾人的生活质量,提高了他们的自主性和独立性。
1. 市场背景残疾人口增加和老龄化是智能轮椅市场发展的主要动力。
据统计,全球范围内残疾人口数量正在逐年增长,而且随着医疗技术的进步和医疗保障制度的完善,残疾人口的生活质量和生活期望值也在提高。
同时,随着世界人口老龄化程度的加剧,老年人群体对于智能轮椅的需求也在增加,这将进一步推动智能轮椅市场的发展。
2. 市场规模根据市场研究,智能轮椅市场规模正在逐年扩大。
预计到2025年,全球智能轮椅市场的价值将达到100亿美元以上。
其中,发达国家市场规模较大,但发展中国家市场潜力巨大,尤其是亚洲地区。
3. 市场驱动因素智能轮椅市场的增长主要受以下因素驱动:3.1 科技进步和创新随着科技的不断进步和创新,智能轮椅的功能和性能不断提升。
目前,智能轮椅已具备了自动导航、遥控操控、避障系统等功能,能够根据用户需求进行个性化定制。
未来,随着人工智能、机器学习和物联网等技术的应用,智能轮椅的功能将进一步增强,市场需求也将进一步扩大。
3.2 健康意识的提高随着人们对于健康的重视程度不断提升,智能轮椅作为一种促进身体活动和康复的工具,受到越来越多人的青睐。
智能轮椅可以帮助残疾人进行康复训练、改善循环系统、预防压疮等,已成为一种重要的健康辅具。
3.3 政策支持与市场推动许多国家和地区都出台了相关政策和措施,鼓励智能轮椅的发展和应用。
政府购买、医保支付和税收优惠等政策手段,为智能轮椅提供了良好的市场环境。
同时,智能轮椅企业通过开展市场活动、提供优惠政策等方式,也积极推动市场需求的扩大。
4. 市场挑战智能轮椅市场也面临一些挑战:4.1 高成本智能轮椅的研发和制造成本较高,导致产品价格相对较高,限制了一部分消费者的购买力。
降低智能轮椅的成本,提高其性价比,是市场发展的关键。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智能轮椅的研究现状和发展趋势t何清华黄素平黄志雄中南大学机电工程学院[摘要]本文比较详尽地介绍了智能轮椅的国内外研究现状,论述了研究中若干关键技术问题,并简要分析了其发展趋势。
[关键词]智能轮椅移动机器人导航人机接口中[A bstract]The research status of intelligent w heelchair at homeand abroad is introduced in this paper.Some important technology among research is described and the develo pmental trend ofintelligent w heelchair is analyzed.[Ke y Words]Intelli g ent w heelchair;mobilerobot;navi g ation;man-machineinterface引言联合国发表报告指出,全世界人口老龄化进程正在加快,今后50年内,60岁以上的人口比例预计将会翻一番,由于各种灾难和疾病造成的残障人士也逐年增加,他们存在不同程度的能力丧失,如行走、视力、动手及语言等。
为了给老年人和残障人士提供性能优越的代步工具,帮助他们提高行动自由度及重新融入社会,目前美国、德国、日本、法国、加拿大、西班牙及中国等国家对智能轮椅进行了研究[1-9],使智能轮椅具有记忆地图、避障、自动行走、与用户交互等功能。
智能轮椅是将智能机器人技术应用于电动轮椅,融合多种领域的研究,包括机器视觉、机器人导航和定位、模式识别、多传感器融合及用户接口等,涉及机械、控制、传感器、人工智能等技术,也称智能轮椅式移动机器人。
本文主要介绍智能轮椅的研究现状、发展趋势和其中的关键技术问题。
2.智能轮椅国内外研究现状自1986年英国开始研制第一辆智能轮椅来,许多国家投入较多资金研究智能轮椅。
如美国麻省理工学院W HEEL ESL EY项目、法国V A HM项目、德国乌尔姆大学M AID(老年人及残疾人助动器)项目、Bremen A utonomous Wheelchair项目、西班牙SIA M O项目、加拿大A AI公司T AO项目、欧盟T IDE项目、K ISS 学院TIN M AN项目、台湾中正大学电机系L UO SON 项目、我国863智能机器人智能轮椅项目及第三军医大学外科研究所项目等。
由于各个实验室的目标及研究方法不尽相同,每种轮椅解决的问题及达到的能力不同。
初期的研究,赋予轮椅的功能一般都是低级控制,如简单的运动、速度控制及避障等。
随着机器人控制技术的发展,移动机器人大量技术用于轮椅,智能轮椅在更现实的基础上,有更好的交互性、适应性、自主性。
西班牙SI AM O始于1996年,由O NCE基金会资助,目标是根据用户的残障程度及特殊需求建造多功能系统。
为达到要求,特别研图1SIAM O[作者简介]何清华:男,1946年出生,中南大学首席教授,博士生导师,国家863计划特种机器人专家。
主研方向:特种机器人,智能轮椅,机电液一体化技术,医疗器械。
图2V A HM究了系统的模块化和灵活性,设计了分布式构架,也着重开发了人机界面,使用户更易于控制轮椅。
项目第一个成果是一个轮椅原型(见图1),其中电子系统完全由A L CAL A 大学电子系开发,包括运动和驾驶控制(低级控制)、基于语音的人机界面、操纵杆、由超声波和红外传感器组成的感知系统(高级控制),轮椅可以探测障碍及突发不平地带。
随着项目的发展,整个系统包括一个完整的环境感知及综合子系统、一个高级决策导航与控制子系统和人机界面三个部分,人机界面有五种方式呼吸驱动、用户独有语音识别、头部运动、眼电法及智能操作杆,大大增加了用户与轮椅交互的方式,使轮椅的功能更为丰富,而模块化保证了将来产品商业化更为容易。
1989年法国开始研究V A HM 项目,第一阶段的智能轮椅由轮椅、PC486、超声波传感器、人机界面和一个可匹配用户身体能力转换的图形屏幕组成,设置为手动、自动、半自动三种模式,手动时轮椅执行用户具体指令和行动任务;自动状态用户只需选定目标,轮椅控制整个系统,此模式需要高度的可靠性;半自动模式下用户与轮椅分享控制。
为了更好适应用户需求,研究者在康复中心进行了一系列调查,得出结论:系统必须是多功能的,不仅应适应残障人士的生理和认知能力,也应适应环境的结构和形态。
在此基础上,经改进研制出第二代产品(如图2),相对于第一代产品,其功能更丰富,面向用户范围更广,性价比更好,改良了大量控制。
德国乌尔姆大学在一个商业轮椅基础上研制了轮椅机器人M AID(见图3),在乌尔姆市中心车站的客流高峰期及1998年汉诺威工业商品博览会的展览大厅环境中进行了实地现场表演。
该轮椅机器人在公共场所拥挤有大量乘客的环境中,进行了超过36小时的考验,能够自动识别和判断出行驶的前方是否有行人挡路,或是否可能出现行驶不通的情况,自动采取绕行动作,它甚至还能够提醒挡路的行人让开道路。
根据航行的环境不同,机器运行模式分为:N AN (狭窄区域航行)和W AN (宽区域航行),大大增加了航行准确率。
此项目得到德国科学技术部的财政支持,据计划,这种智能轮椅将于两年后正式面世,价格会比普通电动轮椅高出约50%。
麻省理工智能实验室的智能轮椅威尔斯利(见图4),为一半自主式机器人轮椅,配备有计算机控制和传感器的电动轮椅,还装有一个M acintosh 笔记本电脑用于人机界面交互,其硬件是从KISS 学院买来用于机器人实践。
系统有两种级别的控制:高级方向指令和低级计算机控制路线,用户拥有最高控制级别。
系统由两部分组成,智能轮椅系统提供低级控制,避障和保证正确的运动方向;用户和轮椅之间的人机界面提供高级控制。
这个智能轮椅允许用户通过三种方式来进行控制:菜单、操纵杆和用户界面。
菜单模式下,轮椅的操作类似一般的电动轮椅。
在操纵杆模式下,用户通过操纵杆发出方向命令来避障。
用户界面模式下,用户和机器之间仅需通过用户眼睛运动来控制轮椅,即用鹰眼系统来进行驱动。
该轮椅在国际联合会的机器人轮椅展览中夺得第一,且是唯一不需要人来指导即穿过门口的机器人。
图3M AID图4威尔斯利图5中科院智能轮椅我国智能轮椅研究起步较晚,在机构的复杂性和灵活性上和国外相比有一定差距,但也根据自身特色研制出技术指标接近国外先进水平的智能轮椅。
研究单位有中科院自动化所、上海交通大学和第三军医大学等。
中国科学院自动化研究所研制了一种具有视觉和口令导航功能并能与人进行语音交互的机器人轮椅(见图5),曾在"863"计划十五周年成就展展馆的人群中穿梭自如。
此项研究成果于2000年11月通过/8630智能机器人主题专家组的鉴定,并研制出我国第一台多模态交互式智能轮椅样机。
此项研究高度重视了智能轮椅人机控制界面的设计,在轮椅的设计中综合运用模式识别实验室有关图像处理、计算机视觉和语音识别等最新成果,使人能通过语音控制轮椅自由行走,轮椅可以实现简单的人机对话功能。
上海交通大学开发成功一种声控轮椅,主要是为四肢全部丧失功能的残疾者设计,使用者只需发出/开0、/前0、/后0、/左0、/右0、/快0、/慢0、/停0等指令,轮椅可在1.2秒内按指令执行。
3.智能轮椅研究关键技术智能轮椅一般由以下三个部分组成:(1)环境感知和导航系统(2)运动控制和能源系统(3)人机接口。
事实上轮椅整个控制是一循环过程,控制框图如图6。
图6智能轮椅基本控制结构3.1导航系统虽然移动机器人技术大量应用于智能轮椅,但由于整个轮椅系统是以人为中心,所以以上这些课题尽管侧重点有所不同,但要解决的中心问题却是相同的,即轮椅的安全导航。
导航系统要解决的问题:一是轮椅空间位置、方向、环境信息的检测;二是所获信息的分析及环境模型的建立;三是使轮椅安全移动的运动路径规划。
导航方法很多:基于地图导航、基于航标导航、基于视觉导航、基于传感器导航或是其中一种或几种结合起来构成导航系统等。
无论采用那种方法,智能轮椅都应具有路径规划与避障、探测与定位等功能。
智能轮椅自主导航主要由环境感知、自定位、运动路径规划和目标确定等几个功能模块组成。
3.1.1定位技术在移动机器人的应用中,精确的位置知识是一个基本问题[10]。
自定位即指在机器人运动过程中利用自身传感器,实时确定其在工作环境中参考坐标系下的位置和姿态。
大致可分为两种:基于计算机视觉的定位技术和基于非计算机传感器(如超声、激光等)的移动机器人定位技术[11]。
常用定位方法有G PS、光码盘、惯性陀螺、磁罗盘、路标匹配、广义路标匹配等[10],每一种方法各有优点及局限性,因而智能轮椅移动机器人实际采用几种方法结合使用,从而提高定位系统的精度和可靠性。
特别要提到的是,美国目前安装了超过五百万包含环境信息的节点,只要遵循同样的标准,轮椅就可利用网络节点信息来方便地进行自定位和与环境交互。
事实上每种已研制的智能轮椅都开发了适用于自己的定位系统,形式多样,但精确度离用户正常使用有一定距离,所以如何提高定位的精度和效能是将来要着重研究的问题之一。
3.1.2多传感器信息融合在未知和不确定的环境下,智能轮椅需通过传感器收集数据,用一定算法对数据进行分析、融合,为导航系统提供正确的决策,所以对传感器的选择是导航系统成功与否的关键。
智能轮椅在行驶时必须不断地感知周围环境及自身状态信息,只靠一种传感器难以完成对环境的感知,所以一般装有多种传感器:超声波传感器、红外传感器、CCD 图像传感器等。
超声波传感器由于信息处理简单、快速和低价而被广泛用来实现障碍物检测,但其探测波束角过大,方向性差,不能提供目标边界信息,所以一般采用红外传感器补偿。
为了有效地利用传感器信息,需要对其进行综合、融合处理。
近年来,人们提出许许多多传感器信息融合算法,如人工神经网络、贝叶斯估计、数学模型、人工智能等,经过融合的信息能比较完整地反映环境特征,提高机器人导航精确度。
3.1.3路径规划路径规划是导航与控制的基础,一个功能完善的路径规划系统应该在多种约束条件下根据各种准则或判据进行规划并给出不同意义下的最优路径[12]。
对动作规划有两种途径,一种是控制型技术,使用完全或接近完全的信息来寻找最佳路径;另一种是反应型技术,在未给出多少信息或无优先信息条件下,使用反作用的基于传感器的动作来寻找路径[13]。
在智能轮椅的路径规划中应该有阶段性、宏观性,在室内或是已有环境模型的空间使用控制型技术,而在室外未知环境中使用反应型技术。
而大多数智能轮椅把导航过程分为全局路径规划和局部反应规划[14]。
智能轮椅在运动过程中对多传感器得来的信息进行融合,结合已知环境信息(如原先记忆地图和网络节点信息等)及与用户之间的通讯,再利用控制算法进行路径规划。