数控系统伺服驱动器接线及参数设定
三菱数控伺服连接、参数说明书
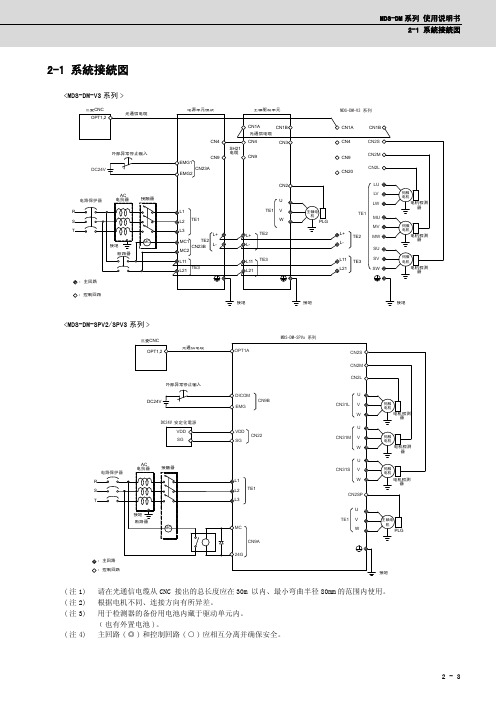
2-1 系統接続図
<MDS-DM-V3 系列 >
ϝ㧅CNC OPT1,2
ܝ䗮ֵ⬉㓚
䚼ᓖᐌذℶ䕧ܹ DC24V
⬉䏃ֱᡸ఼ R S T
AC ⬉ᡫ఼
ഄ ᮁ䏃఼
㾺఼ MC
˖Џಲ䏃 ˖ࠊಲ䏃
⬉⑤ऩܗഫ
Џ䕈偅ࡼऩܗ
CN4
EMG1
W U CN31S V W
CN2SP
U TE1 V
W
Ԏ᳡ ⬉ᴎ
⬉ᴎẔ⌟ ఼
Ԏ᳡ ⬉ᴎ
⬉ᴎẔ⌟ ఼
Ԏ᳡ ⬉ᴎ
⬉ᴎẔ⌟ ఼
Џ䕈⬉ ᴎ PLG
ഄ
( 注 1) ( 注 2) ( 注 3)
( 注 4)
请在光通信电缆从 CNC 接出的总长度应在 30m 以内、最小弯曲半径 80mm 的范围内使用。 根据电机不同、连接方向有所异差。 用于检测器的备份用电池内藏于驱动单元内。 ﹝也有外置电池 )。 主回路 ( ◎ ) 和控制回路 ( ○ ) 应相互分离并确保安全。
伺服电机电源输出端子 (L 轴 /M 轴 /S 轴) 连接伺服/主轴电机电源端子 (U・V・W)。
接地端子。 连接伺服 / 主轴电机的接地端子并接地。
⊼ᛣ
1. 一个供电单元请务必使用一个 AC 电抗器。否则会造成单元损坏。 2. 请勿共用断路器、存在危险。在多个供电单元间、共用断路器的情况下、小容量的驱动单元发生短
⊼ᛣ
请将光通信电缆安装在连接 NC 与驱动单元 30m 时、弯曲半径需保持在 80mm 以上、将 NC 与驱动单元连 接。
㽕⚍
轴序号是由轴号设定用旋转开关决定的。( 参考 3-1-1 旋转开关的设定”) 轴序号与连接到 NC 的先后 顺序无关。
HUST 车床数控器接线手册说明书
HUST车床数控器接线手册(适用机型:ALL)版本:Mar,2015广州亿图自动控制系统有限公司广州市番禺区大石街南大路154号Tel:(020)61916873.Fax:(020)34786951 Email:*****************官方网址:亿图实业股份有限公司台湾苗栗县头份镇工业路80号Tel:(037)623242.Fax:(037)623241HUST CNC接线手册目录一接线 (1)1.1接线架构简介 (1)1.2控制器尺寸 (4)1.2.1H6DK-T/H6D-T/H6DY-T (4)1.2.2H6DV-T/H6YV-T (6)1.2.3H6DLV-T (8)1.3辅助板尺寸 (10)1.3.1H6DK-T/H6DY-T (10)1.3.2H6D-T (11)1.3.3H6DV-T/H6YV-T (12)1.3.4H6DLV-T (13)1.4配件尺寸 (14)1.5接头型式 (15)1.6接头名称 (15)1.7接头脚位定义 (16)1.7.1接头脚位 (16)1.7.2轴向控制脚位接线 (18)1.7.3手摇脉波产生器(MPG)接线 (19)1.7.4主轴控制接线 (20)1.7.5SIO输入/输出接线 (23)二常见伺服驱动器接线 (28)三I/O接线 (50)3.1I/O板定义 (50)3.1.1适用于H620DK-T/H620D-T/H620DV-T (50)3.1.2适用于H640DK-T/H630D-T/H630DV-T (52)3.1.3适用于H650DK-T/H650D-T/H650DLV-T/H640DY-T/H640DLV-T/H630YV-T/H630DY-T (54)3.2轴向I/O定义 (56)一接线1.1接线架构简介控制器接线架构图*标准接线架构SIO port 可选四款辅助板(辅助板类型见下一页)第1组,标准I/O 板接口25pin x2公母对接I0~I23(24in)、O0~O15(16out)第2组,标准I/O 板接口25pin x2公母对接I24~I47(24in)、O16~O31(16out)MPG手摇轮XZC(主轴)HUST H6DCONTROLLER *接线架构(2)10pin 软排线第2组O24~O31(8out)10pin 软排线第2组O16~O23(8out)10pin 软排线第1组O08~O15(8out)10pin 软排线第1组O00~O07(8out)25pin x2公母对接25pin x2公母对接H6DK-T 、H6DY-T H6D-TH6DLV-T H6DV-T 、H6YV-T1.依机构实际需求选用配件。
sg一15伺服驱动器说明书

sg一15伺服驱动器说明书摘要:一、sg 一15 伺服驱动器概述1.产品简介2.适用范围3.产品特点二、sg 一15 伺服驱动器安装与接线1.安装前的准备2.安装步骤3.接线说明三、sg 一15 伺服驱动器参数设置与调试1.参数设置2.调试步骤3.注意事项四、sg 一15 伺服驱动器使用与维护1.使用方法2.维护保养3.故障排除五、sg 一15 伺服驱动器技术参数1.主要性能指标2.电气规格3.环境适应性正文:sg 一15 伺服驱动器是一款高性能、高精度的驱动设备,广泛应用于各种自动化控制领域。
本说明书将为您介绍sg 一15 伺服驱动器的安装、接线、参数设置、调试以及使用与维护等方面的内容,帮助您更好地了解和使用该产品。
一、sg 一15 伺服驱动器概述sg 一15 伺服驱动器是一款具有强大驱动力矩、快速响应和高稳定性的驱动器。
适用于各种工业机器人、自动化生产线、数控机床等设备。
产品具有体积小巧、操作简便、性能可靠等特点。
二、sg 一15 伺服驱动器安装与接线1.安装前的准备:在安装前,请确保所选安装位置便于操作和维护,同时避免阳光直射、湿气、尘埃等影响设备正常工作的环境因素。
2.安装步骤:按照设备安装图纸,依次安装驱动器、电机、编码器等组件,并确保各组件之间的连接牢固可靠。
3.接线说明:请参照产品接线图,正确连接电源、信号、控制等线路,并确保接线牢固可靠。
三、sg 一15 伺服驱动器参数设置与调试1.参数设置:使用配套的编程软件,根据实际需求设置驱动器的各种参数,如速度、加速度、位置等。
2.调试步骤:在确保接线正确的前提下,通过编程软件对驱动器进行调试,以达到预期的工作效果。
3.注意事项:在调试过程中,请遵循安全操作规程,避免因操作不当导致的设备损坏或人身安全事故。
四、sg 一15 伺服驱动器使用与维护1.使用方法:在设备运行过程中,请确保操作人员熟悉驱动器的使用方法,并严格按照操作规程进行操作。
数控系统伺服驱动器接线及参数设定

数控系统伺服驱动器接线及参数设定数控系统是一种实现数控机床运动控制的系统,它通过数控程序控制伺服驱动器驱动电机实现机床各轴的精确定位和运动控制。
正确的接线和参数设定对于数控系统的稳定运行和良好性能至关重要。
一、数控系统伺服驱动器接线1.电源线接线:将电源线的两根火线分别接入伺服驱动器的AC1和AC2端口,将零线接入伺服驱动器的COM端口。
2.电动机线接线:将电动机的三根相线分别接入伺服驱动器的U、V、W端口,注意保持相序正确。
3.编码器线接线:将编码器的信号线分别接入伺服驱动器的A相、B相和Z相端口,注意保持对应关系。
4.I/O信号线接线:将数控系统的输入信号线分别接入伺服驱动器的I/O端口,将数控系统的输出信号线分别接入伺服驱动器的O/I端口。
二、数控系统伺服驱动器参数设定伺服驱动器的参数设定包括基本参数设定和运动参数设定。
1.基本参数设定:包括电源参数设定、电机参数设定和编码器参数设定。
-电源参数设定:设置电源电压和频率等基本参数,确保电源供电稳定。
-电机参数设定:设置电机类型、额定电流、极数等参数,确保驱动器与电机匹配。
-编码器参数设定:设置编码器型号、分辨率等参数,确保编码器信号精确反馈。
2.运动参数设定:包括速度参数设定、加速度参数设定和位置参数设定。
-速度参数设定:设置速度环的比例增益、积分增益和速度限制等参数,确保速度控制精度。
-加速度参数设定:设置加速度环的比例增益、积分增益和加速度限制等参数,确保加速度控制平稳。
-位置参数设定:设置位置环的比例增益、积分增益和位置限制等参数,确保位置控制准确。
3.其他参数设定:包括滤波参数设定、限位参数设定和插补参数设定等。
-滤波参数设定:设置滤波器的截止频率和衰减系数等参数,确保驱动器与电机的振动减小。
-限位参数设定:设置限位开关的触发逻辑和触发动作等参数,确保机床在限位时及时停止。
-插补参数设定:设置插补周期、插补梯度和插补速度等参数,确保插补运动的平滑与快速。
台达PLC实例伺服控制实例参数设置及PLC程序
台达PLC实例伺服控制实例参数设置及PLC程序首先,让我们了解一下什么是伺服控制。
伺服控制是一种可以精确控制运动位置、速度和加速度的控制方法。
伺服控制通常用于需要高精度运动控制的应用,如工业机器人、数控机床等。
对于台达PLC的伺服控制实例,我们将使用台达的伺服驱动器ASDA 系列和PLC编程软件TVP14,这是一种常用的组合。
以下是参数设置和PLC程序的详细说明:1.参数设置:-首先,将伺服驱动器与台达PLC进行连接,并确保连接线路正确无误。
-在PLC程序中,设置好驱动器的通讯端口和通信协议,以确保PLC 能够与伺服驱动器进行通信。
-设置伺服驱动器的型号和ID号,以便PLC能够正确识别和控制伺服驱动器。
-根据应用需求,设置伺服驱动器的运动参数,如速度、加速度、位置等。
这些参数可以根据实际应用进行调整,以达到最佳控制效果。
2.PLC程序:-在PLC编程软件中,创建一个新的PLC程序,并编写相应的逻辑代码。
-首先,使用PLC的输入来控制伺服驱动器的使能信号。
当使能信号为高电平时,伺服驱动器将启动,并开始接收运动指令。
-接下来,编写代码来控制伺服驱动器的运动。
可以使用PLC的输出来控制伺服驱动器的运行方向和速度。
-使用PLC的输入来读取伺服驱动器的状态信息,如位置、速度等。
这些信息可以用于采取相应的控制策略和判断伺服运动是否达到预期目标。
-最后,使用PLC的输出来控制伺服驱动器的停止和复位功能。
当停止信号为高电平时,伺服驱动器将停止运动,并回到初始位置。
通过以上的参数设置和PLC程序,您可以实现对伺服驱动器的精确控制。
您可以根据实际应用要求,进行相应的参数调整和控制逻辑设计,以满足您的需求。
伺服驱动器参数设置方法
伺服驱动器参数设置方法伺服驱动器是现代工业自动化控制系统中的重要组成部分,它能够精确控制电机的转速和位置,广泛应用于数控机床、印刷设备、包装设备、纺织设备等领域。
正确的参数设置对于伺服驱动器的性能和稳定性至关重要。
本文将介绍伺服驱动器参数设置的方法,帮助用户更好地使用伺服驱动器。
1. 确定电机参数。
在进行伺服驱动器参数设置之前,首先需要确定电机的参数,包括额定转速、额定电流、电机型号等。
这些参数将直接影响到伺服驱动器的参数设置,确保参数的准确性是非常重要的。
2. 设置速度环参数。
速度环参数是伺服驱动器中最基本的参数之一,它直接影响到伺服系统的速度响应和稳定性。
在设置速度环参数时,需要根据实际应用情况调整比例增益、积分时间和微分时间等参数,以达到最佳的速度控制效果。
3. 设置位置环参数。
除了速度环参数之外,位置环参数也是伺服驱动器中非常重要的参数。
位置环参数的设置将直接影响到伺服系统的位置精度和稳定性。
在设置位置环参数时,需要根据实际应用情况调整比例增益、积分时间和微分时间等参数,以达到最佳的位置控制效果。
4. 调整过流保护参数。
过流保护是伺服驱动器中非常重要的保护功能,它能够有效地保护电机和驱动器免受过载和短路的损坏。
在设置过流保护参数时,需要根据电机的额定电流和实际负载情况进行调整,确保过流保护参数的准确性和可靠性。
5. 调整过压保护参数。
过压保护也是伺服驱动器中非常重要的保护功能,它能够有效地保护电机和驱动器免受电源过压的损坏。
在设置过压保护参数时,需要根据电机的额定电压和实际电源情况进行调整,确保过压保护参数的准确性和可靠性。
6. 调整过速保护参数。
过速保护是伺服驱动器中非常重要的保护功能,它能够有效地保护电机和驱动器免受过速运行的损坏。
在设置过速保护参数时,需要根据电机的额定转速和实际运行情况进行调整,确保过速保护参数的准确性和可靠性。
总结。
通过正确的参数设置,可以使伺服驱动器在工业自动化控制系统中发挥更好的性能和稳定性。
数控系统伺服驱动器接线及参数设定

数控系统伺服驱动器接线及参数设定数控系统是一种将数字信号转化为机电信号控制机床动作的系统,其中伺服驱动器是数控系统的重要组成部分。
接下来将详细介绍数控系统伺服驱动器接线及参数设定的相关内容。
一、数控系统伺服驱动器接线1.电源接线:伺服驱动器需要接入适配的电源,以提供稳定的电源电压。
通常有三种常用的电源接线方式:单相220V接线、三相380V接线、单相220V与三相380V混合接线。
-单相220V接线:适用于功率较小的伺服驱动器。
通常需要连接L、N和G三根导线,L为火线,N为零线,G为地线。
-三相380V接线:适用于功率较大的伺服驱动器。
通常需要连接主线和辅助线。
主线有三根导线:R、S、T分别为三相电的火线,辅助线为PE 线,用于连接设备的接地线。
-单相220V与三相380V混合接线:适用于一些特殊场合,需根据具体情况进行接线。
2.控制信号接线:伺服驱动器需要接收数控系统发出的控制信号,以控制机床的动作。
通常有以下几个常用的控制信号接线方式:-脉冲信号接线:通常需要连接PUL+、PUL-、DIR+和DIR-四个接口。
PUL+为脉冲信号正极,PUL-为脉冲信号负极,DIR+为方向信号正极,DIR-为方向信号负极。
-使能信号接线:通常需要连接ENA+和ENA-两个接口。
ENA+为使能信号正极,ENA-为使能信号负极,当ENA+处于高电平时,伺服驱动器处于使能状态。
-报警信号接线:通常需要连接ALM+和ALM-两个接口。
当伺服驱动器发生故障或异常情况时,会产生报警信号,通过连接报警信号接口,可以及时响应故障并采取相应的措施。
二、数控系统伺服驱动器参数设定伺服驱动器的参数设定是为了使其能够更好地适应具体的机床加工需求,提高加工精度和效率。
1.速度参数设定:包括加速时间、减速时间、最大速度等参数的设定。
通过合理设定速度参数,可以控制机床的加工速度,以满足不同工件加工的需求。
2.位置参数设定:包括回零速度、回零位置、绝对位置、相对位置等参数的设定。
伺服驱动器重要参数的设置方法和技巧

伺服驱动器重要参数的设置方法和技巧随着市场的发展和国内功率电子技术、微电子技术、计算机技术及控制原理等技术的进步,国内数控系统、交流伺服驱动器及伺服电动机这两年有了较大的发展,在某些应用领域打破了国外的垄断局面。
笔者因多年从事数控技术工作,使用了多套日本安川、松下、三洋等数字伺服,但最近因国产伺服性价比好,使用了一些数控技术公司生产的交流伺服驱动及电动机,对使用中某些方面总结了一些简单实用的技巧。
1 KNDSD100基本性能1.1 基本功能SD100采用国际上先进的数字信号处理器(DSP)TM320(S240)、大规模可编程门阵列(FPGA)、日本三菱的新一代智能化功率模块(1PM),集成度高,体积小,具有超速、过流、过载、主电源过压欠压、编码器异常和位置超差等保护功能。
与步进电动机相比,交流伺服电动机无失步现象。
伺服电动机自带编码器,位置信号反馈至伺服驱动器,与开环位置控制器一起构成半闭环控制系统。
调速比宽 1:5000,转矩恒定,1 r和2000r的扭矩基本一样,从低速到高速都具有稳定的转矩特性和很快的响应特性。
采用全数字控制,控制简单灵活。
用户通过参数修改可以对伺服的工作方式、运行特性作出适当的设置。
目前价格仅比步进电动机高2000~3000元。
1.2 参数调整SD100为用户提供了丰富的用户参数0~59个,报警参数1~32个,监视方式(电动机转速,位置偏差等)22个。
用户可以根据不同的现场情况调整参数,以达到最佳控制效果。
几种常用的参数的含义是:(1)“0”号为密码参数,出厂值315,用户改变型号必须将此密码改为385。
(2)“1”号为型号代码,对应同系列不同功率级别的驱动器和电动机。
(3)“4”号为控制方式选择,改变此参数可设置驱动器的控制方式。
其中,“0”为位置控制方式;“1”为速度控制方式;“2”为试运行控制方式;“3”为JOG控制方式;“4”为编码器调零方式;“5”为开环控制方式(用户测试电压及编码器);“6”为转矩控制方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7
BRK-OFF
-9-
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
18. 信捷 DS2-AS 系列伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
ALM
8
CLR 10
PU+ 11 PU- 12
DR+ 13 DR- 14
+24V 6 GND 15
SON
4. 台达 ASD-A 型伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
PU+ 11 PU- 12
DR+ 13 DR- 14
ALM
8
CLR 10
+24V 6 GND 15
双绞线
SON
9
Z轴抱闸拖线(红) Z轴抱闸拖线(黑)
台达ASDA-A系列伺服器50P高密插头
21 22
25 23
1
D03 ALM
17 DI1+SON
18 DI2 ARST
4
COM+
13
COM-
16 DO1+ 13 COM-
-3-
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
6. 台达 ASDA-B 型伺服接线图(双驱动器接线)
台达ASDA-B型 DB25(两排针孔)
OA
10
/OA
23
8. 日立伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
PU+ 11 PU- 12
DR+ 13 DR- 14
ALM
8
SON
9
CLR 10
+24V 6 GND 15
双绞线
Z轴抱闸拖线
日立ADA系列伺服驱动器
21 22 46 47
23 24
15 16
40 41
11 26
27
2 33 30,34
设定值说明
密码设定(防止任 Fn0010 意修改参数)
UN00C 监视模式
Pn000
Pn001 Pn100 Pn102
选择旋转方向选择 控制模式 选择伺服关或报警 时停止模式 速度环增益 位置环增益
Pn110 自动调谐增益
Pn200 选择脉冲指令方式
Pn50A Pn50B Pn50F
选择功能 选择功能 选择功能
5
Z-
7
ALM
8
CLR 10
PU+ 11 PU- 12
DR+ 13 DR- 14
+24V 6 GND 15
SON
9
双绞线
开通KT270系列伺服驱动器
7
LA
16
LAR
8
LB
17
LBR
25
LZ
26
LZR
15
ALM
12
RES
1
PP
11
PG
10
NP
19
NG
20
COMO
23
COM1
2
SON
-6-
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
7
ALM
8
CLR 10
PU+ 11 PU- 12
DR+ 13 DR- 14
+24V 6 GND 15
SON
9
双绞线
欧瑞传动SD10系列伺服器50P高密插头
18 17 16 15
32 31
20 9
44 43
40 39
4 19,49
5
PAO+ PAO-
PBO+ PBO-
PZO+ PZO-
ALM AL-RST
ALM
8
SON
9
CLR 10
+24V 6 GND 15
双绞线
富士FALDIC-β伺服(26P高密插头)
9
FFA
10
*FFA
11
FFB
12
*FFB
23
FFZ
24
*FFZ
7
CA
8
*CA
20
CB
21
*CB
15
OUT1
2
CON1 RUN
3
CON2 RST
1
P24
14
M24
-4-
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
CA160/180/400/LXXX 数控系统伺服驱动器接线及参数设定
10. 三洋 R 系列伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
ALM
8
CLR 10
PU+ 11 PU- 12
DR+ 13 DR- 14
+24V 6 GND 15
SON
9
双绞线 Z轴抱闸拖线
三洋R系列DB50高密插头
+24V 6 GND 15
SON
9
双绞线 Z轴抱闸拖线
三洋PY系列DB50高密插头
3 4
5 6
7 8
43 30
28 29
26 27
23,49 24,25 12,47,48
OA /OA
OB /OB
OC /OC
OUT RST
PPC /PPC
NPC /NPC
COM+ COM SG
37
SON
42
HBON
-5-
50 24
41 43
37 36
28 33
11 45,47
27 30
9
OA /OA OB /OB
OC /OC
PLUSE /PLUSE
SIGN /SIGN
DO5 DI5
COM+ COMDO5DI8
DI1
1
DO4+
26
DO4-
5. 台达 ASDA-B 型伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
ALM
8
SON
9
PU+ 11 PU- 12
DR+ 13 DR- 14
+24V 6 GND 15
CLR 10
双绞线
东元ESDA系列伺服DB25插头(双排)
16
PA
17
/PA
18
PB
19
/PB
20
PC
21
/PC
14
ALM
1
SON
4
PP
5
/PN
6
DP
7
/DN
10
+24V
40
25 26
PAO /PAO
PBO /PBO
PZO /PZO
ALM A-CLR
PULS+ PULS-
SIGN+ SIGN-
COM+ GND
SRV-ON
BK+ BK-
17.
东菱 EPS-TA 系列伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
ALM
8
CLR 10
PU+ 11 PU- 12
22
N24
2
CLR
25
FG
15.
松下 J 系列伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
ALM
8
CLR
10
PU+ 11 PU- 12
DR+ 13 DR- 14
+24V
6
GND 15
SON
9
双绞线 Z轴抱闸拖线
松下J系列伺服驱动器26P高密插头
13 OA+ 14 OA15 OB+ 16 OB17 OC+ 18 OC-
13.
东元 TSDA 系列伺服接线图
山龙数控DB15驱动器接口
A+
1
A-
2
B+
3
B-
4
Z+
5
Z-
7
ALM
8
CLR 10
PU+ 11 PU- 12
DR+ 13 DR- 14
+24V 6 GND 15
双绞线
SON
9
Z轴抱闸拖线
东元TSDA系列伺服器50P高密插头
35 36 37 38
39 40