图像几何变换的DSP算法研究与实现
图像几何变换的DSP算法研究与实现

关 键 。结 合 超 声 诊 断 仪 图 像 形 成 原 理 , 究 实 现 了 图像 几 何 变 换 的 多 种 算 法 , 通 过 搭 建 D P模 型 进 研 并 S 行 仿 真 , 运 算 量 等 可 行 性 指 标 开 展 比 对 分 析 。 优 选 出 R— h t 法 , 图 像 实 时 性 和 分 辨 率 得 到 有 对 T ea算 使
效 的保 证 。
关 键 词 : 超 声 诊 ห้องสมุดไป่ตู้ ;几 何 变 换 ;D P S ;图像 处 理
中 图 分 类 号 :T 3 1 P 9 文 献 标 识 码 :A 文 章 编 号 :1 7 — 7 0 2 1 )4 0 4 — 3 6 4 7 2 (0 0 1 - 0 3 0
DS lo i m e e r h a d r a e o ma e g o ty ta so ma in P a g rt h r s a c n e lz f i g e me r r n f r t i o
K y wor s:u r s u d;g o t c ta so ma in;DS e d h ao n e mer r n f r t i o P;i g rc s i g ma e p o e sn
B 型 超 诊 断 仪 是 运 用 超 声 传 导 技 术 和 超 声 图 像 诊
Ab ta t s r c :Ul a o n d a n si q i me t S h g r q i me t a o t r s l t n n i l e s t su d ig o t e up n ’ ih e ur r c e n b u e ou i a d t o mei s ,ma e h D P o e ain e o n k s t e S p rt b c me o
DSP常见算法的实现

DSP常见算法的实现3.6常见的算法实现在实际应用中虽然信号处理的方式多种多样,但其算法的基本要素却大多相同,在本节中介绍几种较为典型的算法实现,希望通过对这些例子(单精度,16bit)的分析,能够让大家熟悉DSP编程中的一些技巧,在以后的工作中可以借鉴,达到举一反三的效果。
1.函数的产生在高级语言的编程中,如果要使用诸如正弦、余弦、对数等数学函数,都可以直接调用运行库中的函数来实现,而在DSP编程中操作就不会这样简单了。
虽然TI公司提供的实时运行库中有一些数学函数,但它们所耗费的时间大多太长,而且对于大多数定点程序使用双精度浮点数的返回结果有点“大材小用”的感觉,因此需要编程人员根据自身的要求“定制”数学函数。
实现数学函数的方法主要有查表法、迭代法和级数逼近法等,它们各有特点,适合于不同的应用。
查表法是最直接的一种方法,程序员可以根据运算的需要预先计算好所有可能出现的函数值,将这些结果编排成数据表,在使用时只需要根据输入查出表中对应的函数值即可。
它的特点是速度快,但需要占用大量的存储空间,且灵活度低。
当然,可以对上述查表法作些变通,仅仅将一些关键的函数值放置在表中,对任意一个输入,可根据和它最接近的数据采用插值方法来求得。
这样占用的存储空间有所节约,但数值的准确度有所下降。
迭代法是一种非常有用的方法,在自适应信号处理中发挥着重要的作用。
作为函数产生的一种方法,它利用了自变量取值临近的函数值之间存在的关系,如时间序列分析中的AR、MA、ARMA等模型,刻画出了信号内部的特征。
因为它只需要存储信号模型的参量和相关的状态变量,所以所占用的存储空间相对较少,运算时间也较短。
但它存在一个致命的弱点,由于新的数值的产生利用了之前的函数值,所以它容易产生误差累积,适合精度要求不高的场合。
级数逼近法是用级数的方法在某一自变量取值范围内去逼近数学函数,而将自变量取值在此范围外的函数值利用一些数学关系,用该范围内的数值来表示。
实验报告几何变换实验

实验报告几何变换实验实验报告:几何变换实验引言:几何变换是计算机图形学中的重要概念,它可以改变图像的形状、位置和大小。
在本次实验中,我们将通过对几何变换的实际操作,深入了解几何变换的原理和应用。
一、实验目的本次实验的主要目的是探究几何变换在图像处理中的应用,具体包括平移、旋转、缩放和翻转等几何变换操作。
通过实际操作和观察,我们将了解几何变换对图像的影响,并学习如何使用计算机编程实现这些变换。
二、实验材料和方法1. 实验材料:- 一台计算机- 图像处理软件(如Photoshop、GIMP等)- 编程软件(如Python、MATLAB等)2. 实验方法:- 步骤一:选择一张图片作为实验对象,并导入到图像处理软件中。
- 步骤二:使用图像处理软件进行平移操作,观察图像的位置变化。
- 步骤三:使用图像处理软件进行旋转操作,观察图像的旋转效果。
- 步骤四:使用图像处理软件进行缩放操作,观察图像的大小变化。
- 步骤五:使用图像处理软件进行翻转操作,观察图像的翻转效果。
- 步骤六:使用编程软件编写程序,实现上述几何变换操作,并观察结果。
三、实验结果与分析1. 平移操作:在实验中,我们发现通过平移操作,可以将图像在水平和垂直方向上进行移动。
通过调整平移的距离和方向,我们可以改变图像在画布上的位置。
这种操作常用于图像的对齐和拼接等应用中。
2. 旋转操作:旋转操作可以改变图像的角度和方向。
通过调整旋转的角度和中心点,我们可以使图像以不同的角度进行旋转。
这种操作常用于图像的矫正、仿射变换等应用中。
3. 缩放操作:缩放操作可以改变图像的大小。
通过调整缩放的比例,我们可以使图像变得更大或更小。
这种操作常用于图像的放大、缩小、裁剪等应用中。
4. 翻转操作:翻转操作可以改变图像的方向。
通过水平或垂直翻转,我们可以使图像在左右或上下方向发生镜像反转。
这种操作常用于图像的镜像处理、对称效果等应用中。
四、实验总结通过本次实验,我们深入了解了几何变换在图像处理中的应用。
DIP实验课件.ppt

实验结果示例
原图像
均衡后图像
2000
直方图
1500
1000
500
0
0
100
200
300
2000
均衡后直方图
1500
1000
500
0
0
100
200
300
返回目录
实验二: 图像增强与平滑
实验结果示例
返回目录
实验二: 图像增强与平滑
实验结果示例
原图像
加噪图像
3*3窗 口 中 值 滤 波 后 图 像
5*5窗 口 中 值 滤 波 后 图 像
结束
图像镜像算法流程图
结束
图像旋转算法流程图
结束
图像缩放算法流程图
返回目录
实验一: 图像几何变换
实验结果示例
返回目录
实验一: 图像几何变换
实验报告
按照格式要求认真如实的撰写实验报告。基本格式:
一、实验目的
二、实验仪器
三、实验内容
四、实验原理
五、实验步骤
六、实验结果及分析,这一部分主要包括:
1.经调试正确的程序源代码。要求有必要的说明和注释,如程序
4.学习使用ICETECK-DM642-IDK-M实验系统。 参见附录D ICETEK-DM642-IDK-M系统的入门实验。
实验原理
几何变换不改变图像的像素值,只改变像素所在的几何位置。 平移、镜像、旋转、缩放、错切变换… 具体请参考教材及实验指导书。
返回目录
实验一: 图像几何变换
实验方案
自行设计实验方案,主要包括: 1.实验内容的算法原理; 2.实现图像处理算法的程序流程图; 3.编写M-function函数,并对其(包括调用的平台内部函数)功能
全自动数字图像畸变校正算法及其DSP实现
7 8
福
建 电
脑
20 0 7年第 9期
全 自动数字 图像 畸变校正算 法及 其 D P实现 S
姜 靖, 闵华松
(武 汉 科 技 大 学 计 算 机 学 院 湖 北 武 汉 4 0 8 30 1)
【 摘 要 】 本 课 题 通过 对 现 有 图像 畸 变校 正 算 法进 行 研 究和 分 析 , 对 当前 D P ( 字 信 号 处 理 ) 术 的 新发 展 , 出 : 针 S 数 技 提 了基 于 D P的快 速 图像 畸 变校 正 技 术 。此 技 术 结 合 了 当前 最 新 的 数 字信 号 处理 技 术 . 根 据 具 体 系统 特 性 对 现 有 算 法 进 行 S 并 分析 、 化 和 改 进 , 最 终 形成 具 有 创 新 性 、 用 性 和 快速 性 特 点 的 算 法 。 优 以 实 【 关键字 】 畸 变校正、 字信号处理 器、 : 数 图像 处理、 控制 点检测
E ), Swx )(+,+)I , f (vI) , ̄ 【 V (Y , (= , , 一 x)
E, u V , U v l I
・ , L , x , J
() 3 _ 1
() 3 — 2
公 司 6 1 D P系 统 实 现 7 1S 2 .几何 畸 变 校 正 系统
R I J u o R L . t
2 j
(— ) 33
化 。 样 。 使 得 物 体 经 过 畸 变 镜 头 后 成 像 偏 离 理 想 位 置 . 离 这 就 偏 理 想位 置 距 离 的 大 小 称 为 畸 变 。 般来 讲 . 学 系统 是 以光 轴 对 称 的 . 光 轴 即为 系 统 的径 光 其 向对 称 中心 . 系统 的 特 性 函数 只 与距 该 对 称 中心 的 距 离 有关 。 假 设 光学 镜 头 各 向 同 性 . 且 物 象空 间媒 质均 匀 。 像 的失 真 程 度 而 则 是 关 于光 学 中心 对 成 的 . 即在 光 学 中 心 处 畸变 量 为零 . 其 他 位 在 置 。 变 量 随着 像 元 位 置 和 光 学 中 心 的 距离 的 变 化 而 变化 . 在 畸 但 以光 学 中心 为 圆 心 . 径 相 等 的 圆 周 上 , 变 量 是 不 变 的 。将 这 半 畸 种 性 质 应 用 于 图 像 的几 何 变 换 .就 可 以将 二 维 的变 换 问 题 简 化
基于DSP的音频信号处理算法研究与实现

基于DSP的音频信号处理算法研究与实现音频信号处理是一项关键技术,它在实际生活和各个领域中得到广泛应用。
基于数字信号处理器(DSP)的音频信号处理算法研究与实现,成为了当前研究和开发的热点方向。
本文将探讨利用DSP实现音频信号处理算法的研究方法和具体实现步骤。
1. DSP的概述DSP(Digital Signal Processing,数字信号处理)技术是指利用数字化方法对模拟信号进行处理、计算和编码的技术。
它通过数字滤波、数字变换等算法对数字信号进行处理,具有高效性、灵活性和精确性等优势。
DSP技术在音频处理领域有着重要的应用。
2. 音频信号处理算法研究方法2.1 问题分析:首先需要明确要处理的音频信号处理问题,例如降噪、滤波、均衡等。
针对不同的处理问题,选择合适的算法进行研究。
2.2 算法选择:根据具体问题的特点,选择适合的音频信号处理算法,例如自适应滤波算法、小波变换算法等。
2.3 算法实现:将选择的算法进行进一步实现,需要借助DSP的开发环境和相应的软件工具进行编程和调试。
算法的实现过程中需要注意算法的时效性和实时性。
3. DSP音频信号处理算法实现步骤3.1 信号采集:通过外设音频采集模块,将模拟音频信号转换为数字信号,输入DSP进行处理。
3.2 数据预处理:对采集到的音频信号进行预处理,包括滤波、去噪等操作。
这一步旨在减小输入信号的噪声干扰,提高音频信号处理的质量。
3.3 算法实现:选择适当的音频信号处理算法进行实现,例如自适应滤波、小波变换等。
根据算法的特点和要求,进行程序编写和调试。
3.4 数据后处理:将处理后的数字音频信号转换为模拟信号,经过后续的数模转换模块,输出音频信号。
4. 实例分析:音频降噪算法在DSP上的实现以音频降噪算法为例,介绍基于DSP的音频信号处理算法的具体实现步骤。
4.1 问题分析:降噪算法是音频信号处理中常见的问题,通过去除背景噪声提升原始信号的质量。
4.2 算法选择:选择适合的降噪算法,例如基于自适应滤波的降噪算法,通过实时估计噪声模型并进行滤波处理。
希尔伯特黄变换基于多片DSP的实时实现的开题报告
希尔伯特黄变换基于多片DSP的实时实现的开题报告一、课题背景希尔伯特黄变换是一种时频分析方法,广泛应用于信号处理和图像处理领域,如音频处理、振动分析、动力学分析等。
在实时处理中,为了满足实时性和计算速度要求,通常采用多片DSP进行并行处理。
二、研究目的本项目旨在探究希尔伯特黄变换在多片DSP上的实时实现方法,研究如何细分任务、合理分配任务和调度,以达到最佳计算性能和效率。
三、研究内容1. 希尔伯特黄变换算法的原理及实现方法;2. 多片DSP系统的特征、影响因素及处理效率;3. 对希尔伯特黄变换进行任务分解、任务调度和数据通讯;4. 实现多片DSP系统的并行计算,优化计算性能和效率;5. 测试多片DSP系统的实时性、精度和计算效率。
四、预期成果及意义通过本项目研究,预期能够实现希尔伯特黄变换在多片DSP上的实时实现,并优化计算性能和效率,提高实时处理的能力。
这对于信号处理和图像处理领域的研究和应用具有重要意义。
五、研究方案1. 理论研究:查阅文献资料,学习希尔伯特黄变换算法及多片DSP 架构和并行计算原理;2. 系统设计:设计多片DSP系统的架构和算法实现;3. 实验测试:在多片DSP系统上进行希尔伯特黄变换的实时实现,并测试其实时性、精度和计算效率;4. 数据分析:分析实验数据,优化算法和架构设计,提高计算性能和效率。
六、进度安排1. 第一周:阅读相关文献,学习希尔伯特黄变换算法和多片DSP系统架构;2. 第二周:设计多片DSP系统的架构和算法实现;3. 第三周:实现并测试多片DSP系统的希尔伯特黄变换算法;4. 第四周:分析实验数据,优化算法和架构设计;5. 第五周:撰写开题报告,准备答辩。
基于DSP的实数FFT算法研究与实现_陈恒亮
2005202225收到第1稿,2005204220收到修改稿.基于DSP 的实数FF T 算法研究与实现陈恒亮 蒋 勇(深圳技师学院电气工程系,深圳 518040)摘要 介绍了一种实数快速傅里叶变换(FFT )的设计原理及实现方法,利用输入序列的对称性,将2N 点的实数FFT 计算转化为N 点复数FFT 计算,然后将FFT 的N 点复数输出序列进行适当的运算组合,获得原实数输入的2N 点FFT 复数输出序列,使FFT 的运算量减少了近一半,很大程度上减少了系统的运算时间,解决了信号处理系统要求实时处理与傅里叶变换运算量大之间的矛盾.同时,给出了在TMS320VC5402DSP 上实现实数FFT 的软件设计,并比较了执行16,32,64,128,256,512,1024点实数FFT 程序代码与相同点数复数FFT 的程序代码运行时间.经过实验验证,各项指标均达到了设计要求.关键词 数字信号处理器,快速傅里叶变换,蝶形运算引言数字信号处理器(DSP )是一种可编程的高性能处理器,近年来发展很快.它不仅适用于数字信号处理,而且在图像处理、语音处理、通信等领域得到了广泛的应用.通用的微处理器在运算速度上很难适应信号实时处理的要求.DSP 处理器中集成有高速的乘法器硬件,能快速地进行大量数据的乘法和加法运算,TMS320VC5402[1,2](以下简称C5402)就是TI 公司近年推出的一款高性能DSP ,它能在一个指令周期内完成一次乘法和一次加法,已经成为当今应用最为广泛的DSP 芯片之一.傅里叶变换是一种将信号从时域变换到频域的变换形式,是声学、图像、电信和信号处理等领域中一种重要的分析工具.其中,离散傅里叶变换(DF T )更是数字信号处理领域不可缺少的工具之一[3,4],特别是快速傅里叶变换(FF T )的出现使得DF T 在实际应用中得到了广泛的应用.通常情况下,都是假设输入的数字序列是复数的,但是,输入信号是纯实数的更符合实际情况,如果利用输入序列的对称性,将2N 点的实数FF T 计算转化为N 点复数FF T 计算,然后将FF T 的N 点复数输出序列进行适当的运算组合,获得原实数输入的2N 点FF T 复数输出序列,这样使得FF T 的运算量减少了近一半,效率可比一般的FF T 提高近一倍.通过这种变换处理,可以很大程度上减少了系统的运算时间,满足信号处理系统对实时处理和运算精度的要求.1 实数FFT 算法构成FF T 的实质是将较长序列的DF T 运算逐级分解为较短序列的DF T 运算.序列f (n )的DF T 定义为F (k )=∑N -1n =0f (n )e-j2πnk/N=∑N -1n =0f (n )Wnk(1)其中W =e -j2π/N 为旋转因子.假设g (n )(n =0,1,…,2N -1)是输入为2N 点的实数序列,作如下变换将2N 点的实数DF T 变为N 点的复数DF T取:x 1(n )=g (2n ),x 2(n )=g (2n +1).设:x (n )=x 1(n )+j x 2(n ),则X (k )=X 1(k )+j X 2(k ).由傅里叶变换的特点能推出X 1(k )=12{X (k )+X 3(N -k )}X 2(k )=12j{X (k )-X 3(N -k )}k =0,1,…,N -1(2)其中3是复共轭算子.用2个N 点DF T 表示一个2N 点DF TG (k )=DF T [g (n )]=DF T [g (2n )]+第3卷第2期2005年6月动力学与控制学报JOURNAL OF D YNAMICS AND CON TROLVol.3No.2J un.2005 DF T [g (2n +1)]=X 1(k )+W k2N X 2(k )(3)将式(2)代入式(3),有G (k )=12{X (k )+X 3(N -k )}+ W k 2N12j{X (k )-X 3(N -k )}= X (k )A (k )+X 3(N -k )B (k )(4)其中A (k )=12(1-j W k 2N ),B (k )=12(1+j W k 2N ),k =0,1,…,N -1.如果输入为纯实数,其DF T 结果具有复共轭对称的特点,同时,由于DF T 具有周期性,X (k +N )=X (k ),则X (N )=X (0).根据这些特点,能推导出输入为实数的DF T 另一半结果.将式(4)的乘法运算展开,并使计算结果实部和虚部分离,得到如下结果Gr (k )=X r (k )A r (k )-Xi (k )A i (k )+ X r (N -k )B r (k )+Xi (N -k )B i (k )Gi (k )=Xi (k )A r (k )+X r (k )A i (k )+ X r (N -k )B i (k )-Xi (N -k )B r (k)(5)其中k =0,1,…,N -1;X (N )=X (0);Gr (k )=X r (0)-Xi (0)Gi (k )=0(6)其中k =N ;Gr (2N -k )=Gr (k )Gi (2N -k )=-Gi (k )(7)其中k =0,1,…,N -1.2 软件实现软件设计的具体过程可以归纳为:将2N 点实数FF T 输入序列进行适当的组合以形成N 点复数序列;计算复数序列的FF T ;将FF T 的N 点复数输出序列按式(5)~式(7)进行适当的运算组合,恢复为原来实数输入的2N 点FF T 复数输出序列.2.1 软件设计需要解决的问题要实现高效的实数FF T 运算,需要解决好以下几个问题:定标、制表、即位运算.2.1.1 定标由于C5402是16bits 定点型DSP ,因此必须采用定标算法防止计算过程中的溢出.如果要求N 点FF T 的结果不发生溢出,则要求时域信号的幅度上限小于1/N ,因此定标算法就是对时域信号进行除以N 的运算,这主要有以下3种实现方式:1)预定标:数据输入端除以N ,以使FF T 的结果不发生溢出;2)逐级定标:由于FF T 的基本运算单元是碟形运算,每个基本的碟形运算需要一次复数乘法和两次复数加法,在每个碟形运算之后除以2就可以防止溢出.3)块浮点定标:只对发生溢出的碟形运算进行除以2的处理.块浮点定标的精度最高,但它需要逐级进行溢出和移位选择,因此实现最复杂;预定标只在数据输入的一级上进行移位,实现最简单,但性能最差;逐级定标不需要判断和选择,同时,由于C5402有专门对运算进行定标的滚筒移位器,它能在进行乘加运算的同时完成定标,不需要额外占用CPU 时间,其性能比块浮点定标略差,在对FF T 运算精度要求不是特别高时,逐级定标是最佳选择,所以,这里选择逐级定标方法,在计算完FF T 后再对结果恢复原值.2.1.2 制表从FF T 的第4级开始,将每一级运算所需的旋转因子事先计算出来,并按照实数FF T 运算要求的顺序存放好,形成一个旋转因子表,在计算到FF T 的特定级时到旋转因子表的对应位置查表.这种方法的优点是节约时间,缺点是占用内存较多,在对实时性要求比较高的场合,以占用一定内存来提高运行效率是一种比较可取的方法.2.1.3 即位运算即位运算是指当把数据存入存储器后,每一级运算的结果都存在相应的输入存储器中,直到计算出最终结果.系统中,使用时间抽选奇偶分解FF T 算法,将2N 点实数FF T 输入序列进行适当的组合以形成N 点复数序列,将这N 点复数序列进行倒位序排列,结果还存在原N 点复数序列所在的存储单元中,随后逐级进行碟形运算,后一级的结果存入前一级对应数据所在的存储单元中,直至算得最后结果.2.2 具体软件编程在进行实数FF T 软件设计时,首先将2N 点实数FF T 输入序列进行适当的组合以形成N 点复数序列,然后调用倒位序子程序cbrev 将N 点复数序15第2期陈恒亮等:基于DSP 的实数FFT 算法研究与实现列进行倒位序排序,以使得最后结果是实数FF T 要求的正常序列.图1为实数FF T 系统程序流程图.图1 实数FFT 系统程序流程图Fig.1 Program flow chat of real FFT system由于FF T 的前3级运算的旋转因子比较简单,相应的运算量比较小,为了最大限度地提高系统的运行效率,采用前3级运算与FF T 第4级以后的运算分开设计:将FF T 的前3级运算放在一起单独组成子程序;由于FF T 第3级以后的碟形运算有相同的规律,将其以宏(stdmacro stage ,s1,s2,idx ,sin ,cos )的形式编程,在进行相应级的运算时传递当前级FF T 运算的参数(当前执行FF T 的第stage 级、该级所含群的个数s1、该级运算每个群所含碟形运算的个数s2、该级运算每个碟形运算两个输入端数据间的偏移量idx 、该级每个群在计算中所需旋转因子的首地址sin/cos )执行FF T 计算.将FF T 的N 点复数输出序列按照式(5)~式(7)所示实数FF T 算法构成进行适当的运算组合,恢复为原来实数输入的2N 点FF T 复数输出序列.这一级运算是以宏(unpack sin ,cos )的形式编程,sin 和cos 为这一级运算所需要的旋转因子首地址.3 实验分析表1给出了一组使用所提方法得到的16点实数FF T 与MA TLAB 的内部函数fft (x )算得结果的对比关系.由于在要求对信号进行实时处理的实际运用中,FF T 运算的点数通常小于或等于1024点,基于C5402DSP (C5402的工作时钟频率为100MHz ),表2给出了应用文中方法实现16,32,64,128,256,512,1024点实数FF T 与对应点复数FF T 的程序代码长度及运行时间的比较.从表1和表2中可以看出,文中提出的基于DSP 的实数FF T 算法在处理1024点实数FF T 时不到600μs 即可完成,同时,该算法还具有很高的精度(数据误差小于0.5%),并且如果将该算法扩展为32bits 实数FF T ,将会能满足更高的精度要求.结果显示基于DSP 的实数FF T 算法完全可以满足信号处理系统对实时处理和数据精度的要求,有很大的应用价值.表1 实验数据Table 1 Experimental dataNo.Raw data (Q15)Data from MATLAB Q (15)Data from DSP Q (15)12106185544.0000000000855522-3624-33222.6878097975-51863.8120423701i -33232-51872i 375644615.3342594059-73761.8437743444i 4608-73776i 419130-38774.4120260345+88354.1125079538i -38784+88352i 52764147276.0000000000-23036.0000000000i 47264-23040i 615609-54211.8923457129-64882.8175987058i -54224-64896i 7-2121597240.6657405941-69005.8437743444i 97232-69008i 8-618096308.9921815449+21351.2578509703i96304+21344i92853612968.000000000012960102731996308.9921815449-21351.2578509703i 96304-21344i 11-588097240.6657405941+69005.8437743444i 97232+69008i 1225795-54211.8923457129+64882.8175987058i -54224+64896i 13-2897247276.0000000000+23036.0000000000i 47264+23040i 14-9642-38774.4120260345-88354.1125079538i -38784-88352i 152********.3342594059+73761.8437743444i 4608+73776i 16-32119-33222.6878097975+51863.8120423701i-33232+51872i25动 力 学 与 控 制 学 报2005年第3卷表2 实数FFT 与一般复数FFT 程序代码长度及运行时间比较Table 2 Comparison of code length and operation time between real FFT and common complex FFTPoints of FFTCode length ofreal FFT (word )Operation time ofreal FFT (μs )Code length ofcomplex FFT (word )Operation time ofcomplex FFT (μs )16211 3.64191 5.22322537.4123912.336430117.628727.7212834939.1633567.9525639785.7383151.42512445208.81431380.491024493557.16479920.98 参 考 文 献1 TMS320C54x DSP Reference Set Volume 1:CPU andPeripherals.Texas Instrument Inc ,19992 TMS320C54x Assembly Language Tools User ’s Guide.Texas Instrument Inc ,19993 [美]布莱赫特.数字信号处理的快速算法.北京:电子工业出版社,1992(Rright Hert.Rapid algorithms of digitalsignal processing.Beijing :Electronic Industrial Press ,1992(in Chinese ))4 程佩青.数字信号处理教程.北京:清华大学出版社,2001(Cheng Peiqing.Tutorial of digital signal processing.Beijing :Qsinghua University Press ,2001(in Chinese ))Received 25February 2005,revised 20April 2005.DESIGN AN D REAL IZATION OF REAL FFT BASED ON DSPChen Hengliang Jiang Y ong(Depart ment of Elect rical Engineering ,S henz hen Technician College ,S henz hen 518040,China )Abstract The design principle and realization of a real FF T algorithm were proposed.In the proposed algo 2rithm ,real FF T computation of 2N points were transformed to complex FF T computation of N points accord 2ing to the symmetry of input serial at first.Then after properly processing the N complex outputs of FF T ,the 2N FF T complex outputs of original real inputs were gotten.The proposed algorithm can almost half reduce the operation time of FF T and resolve the conflict between the request of real 2time operation in digital signal processing system and the lots of accounting in FF T.The software design of real FF T based onTMS320VC5402DSP was given.The code length and operation time of the real FF T with 16,32,64,128,256,512,1024points were compared with that of complex FF T.The experiment results proved the correct 2ness of the method.K ey w ords digital signal processor ,FF T algorithm ,butterfly operation35第2期陈恒亮等:基于DSP 的实数FFT 算法研究与实现。
数字图像处理课件第6章图像的几何变换
x Hx H
y Hy H
第6章 图像的几何变换
齐次坐标的几何意义相当于点(x, y)落在3D空间H=1
的平面上,如图6-2所示。如果将xOy平面内的三角形abc的 各顶点表示成齐次坐标(xi, yi, 1)(i=1, 2, 3)的形式,就变成H =1平面内的三角形a1b1c1的各顶点。
图6-2 齐次坐标的几何意义
第6章 图像的几何变换
齐次坐标在2D图像几何变换中的另一个应用是:如某 点S(60 000,40 000)在16位计算机上表示,由于大于32767 的最大坐标值,需要进行复杂的处理操作。但如果把S的坐 标形式变成(Hx, Hy, H)形式的齐次坐标,则情况就不同了。 在齐次坐标系中,设H=1/2,则S(60 000,40 000)的齐次坐 标为(x/2,y/2,1/2),那么所要表示的点变为(30 000, 20 000,1/2),此点显然在16位计算机上二进制数所能表示 的范围之内。
(图像上各点的新齐次坐标)
(图像上各点的原齐次坐标)
第6章 图像的几何变换 设变换矩阵T为
a b p
T c
d
q
l m s
则上述变换可以用公式表示为
=
T
Hx1' Hy1'
Hx2' Hy2'
Hxn' Hyn'
x1 x2 xn
T
y1
y2
yn
H H H 3n
1 1 1 3n
第6章 图像的几何变换
6.4 图像镜像
6.4.1 图像镜像变换 图像的镜像(Mirror)变换不改变图像的形状。 镜像变换分为两种:一种是水平镜像,另外一种是垂直镜
基于DSP实验平台的“光电图像处理”课程探索
hep s u nt o l a n t o e ia o ldg nd t e l he ra lt f i ov to l t de st e r he r tc lkn w e e a o d veop t i biiy o nn a i n. Ke wo ds ph oee t i m a o e sn y r : ot lc rc i ge pr c s i g;DSP e hn o t c olgy;t a hi g r f r e c n e o m
的 多媒 体 处 理 器 D 4 或 D 6 3 图 像 经 过 DS M6 2 M 4。 P 处 理后再 通 过 视 频 编 码 器 ( 飞利 浦 S 如 AA7 0 1 5芯
1
. 2
. 1
.
1
O
1
O
O
O
.
2
O
2
l
2
1
.
1
0
l
的算 法 , D P平 台上 对 比 图像 处 理 效 果 , 而 引 在 S 进
导他 们进 行创 新 。 因此 , 究 融 合 D P技 术 的“ 研 S 光 电图像处 理” 程 的教 学方 法有 着现 实 意义 。 课
l 课 程 教 学 特 点 与 现 状
“ 电图像 处 理 ” 程 具 有 如 下 特 点[ : 图像 光 课 2① ]
课 程 设计 要 针对 一 个 具体 项 目提 出解 决 方 案 ,
综合 性和设计 性更 强 , 计 命 题要 与 学 生 自主选 题 设 相结 合 。我们 提 前 向学 生 公 布课 程 设计 要 求 , 定 拟
几个题 目大方 向 , 出 自主选题 可 以发 挥 的空间 。 指
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图像几何变换的DSP算法研究与实现
摘要: 超声诊断仪对分辨率和实时性的较高要求,使得采用DSP算法成为提高仪器整体性能的关键。
结合超声诊断仪图像形成原理,研究实现了图像几何变换的多种算法,并通过搭建DSP模型进行仿真,对运算量等可行性指标开展比对分析。
优选出R-Theta算法,使图像实时性和分辨率得到有效的保证。
关键词: 超声诊断; 几何变换; DSP; 图像处理
B型超诊断仪是运用超声传导技术和超声图像诊断技术的一种医疗诊断仪器,它主要用亮度调制方式来显示回波信号的强弱,反射回的时间反映扫描的深度,从而反映人体内部结构特征,也称作“断层图像” [1]。
其中数字扫描变换的精度直接影响图像的分辨率和几何失真度,变换算法的复杂度直接影响图像处理运算量和图像处理的实时性,也直接影响后续图像处理的质量。
DSP易于满足图像处理中运算量大、精度高、实时性强、数据传输速率高等要求。
采用高速DSP芯片作为B超图像数字扫描变换的核心数据处理单元,能很好地实现不同B超图像处理算法,且能直观、快速地观察到变换结果,实用性强[2]。
此外,对于一些新型的运算量较大的图像处理系统,DSP也能很好地进行扩展,从而使高速B超图像处理系统得到广泛的使用。
对于一些新型的运算量较大的B超图像处理系统,DSP也能很好地进行扩展[3]。
1 图像的几何变换一个完整的B超系统[4]。
当B超探头获得激励脉冲后发射超声波,经过一段时间延迟,再由探头接收反射回的回波信号,探头接收反射回来的回波信号经过滤波、对数放大等信号处理[5],由DSC电路进行数字变换形成数字信号,在CPU控制下进一步进行图像处理,再同图表形成电路和测量电路一起合成视频信号送给显示器形成B超图像,也称二维黑白超声图像。
B超的超声探头按形状通常可分为线阵式和凸阵式。
线阵式和凸阵式均用亮度表示回波信号的强弱,反射的时间长短表示扫描的深度。
线阵式B超探头的形状为矩形,扫描采集回来的信号为一个矩形,通过处理后可直接在显示器上显示。
而凸阵式B超探头为圆弧形,它接收到的回波信号为一个扇形的信号,需对它进行几何变换才能变为适合人眼观察的图像。
线阵式和凸阵式回波信号的示意图。
由图2可知,凸阵式扫查方式比线阵式扫查方式的视野更大,且凸阵式的物理外形更与人体接近。
凸阵式扇形扫查B超的前部为圆弧形,相应的B超图像称为扇形图像,即为一散形面,其中散角为凸阵两边阵之角度,散形中心为探头弧线圆心,散形半径则与探头半径和B 超探测深度有关。
换能器均匀分布在圆弧面上。
许多阵元沿该圆弧面排列,此类换能器中的阵元按顺序发射和接收超声波,这些超声扫查线对应图像存储器的列地址,每条扫查线上的样本对应图像存储器的行地址,采样值依次写入图像存储器。
凸阵式扇形扫查的回波信号为一个扇形,可将它看做极坐标形式,图3显示出这种极坐标形式的采样点与光栅扫描显示像素的位置关系。
从图3中可见,B超所采集到的回波信号为一个极坐标形式的扇形面,而显示器的像素分布为一个直角坐标的矩形。
同时,从图4中可以看出信号采样点与显示像素点的位置并不一一对应,相邻扫查线之间还有很多空缺的像素点,这种现象在远场尤为明显[6]。
设计DSP算法,根据空缺像素周围的回波信号采样的近似值,并在显示此图像之前将这些近似值插入到相应的空缺处,使图像均匀连续。
同时,B超检查对于图像的质量以及实时性要求都很高。
要提高图像质量就要增加处理精度,以提高图像的分辨率,但处理精度要求越高,则需存储器字长越长(字长越短,则图像数字化时的量化误差和量化噪声均加大),对相同大小的一帧图像所需存储器的容量越大。
因此系统完成一帧图像的数字处理所需时间加长,使得系统的实时性得不到保证。
而且,算法的复杂度和运算量也将直接影响到图像的实时性。
因此,必须通过设计相应的DSP算法以及运算精度来保证变换后的图像的分辨率和实时性。
2 图像几何变换的DSP算法研究 B超是一种分辨率和实时性要求都很高的仪器,采用有效的DSP算法是提高B超整体性能的关键。
不同的DSP算法运算量会有很大的差异,运算量越大,图像越清晰,处理时间越长。
现代DSP算法就是在分辨率和运算量之间寻找折中,典型的算法分为一维线性算法和二维线性算法。
2.1 一维线性算法 NNIA算法是最早的一维线性变换算法,它主要运用直角坐标与极坐标之间的几何变换关系来实现。
凸探头采集到的信号为一个扇面,可视为极坐标的形式,显示器的像素分布则是矩形,可视为直角坐标方式。
通过极坐标与直角坐标的变换关系,可得到每个回波信号在显示器上的对应值:通过这种算法,每个回波点都能求出相应的像素值并进行填充,而对于给定夹角的扇形,回波点所对应的图像可以预先计算出来,而且采用这种算法简单直观。
分析其运算量,从算法上看,假设总共有X个回波点,每个回波点进行几何变换需要计算正弦和余弦的值和两次乘法。
改进NNIA算法是在NNIA算法的基础上建立起来的,它从像素点反过来寻找对应回波点来对像素进行填充。
由于像素点是连续的,因此每个像素点都能找到与其相对应的回波数据的值,算法模型。
首先通过极坐标与直角坐标的对应关系计算出像素点在极坐标下的对应点P,再找出与P 点相邻的4个回波点A、B、C、D(其中A、C属于同一波束,B、D属于同一波束)。
判断A、B、C、D谁最靠近P点,就将这点的值赋值给P,这样就完成了极坐标对直角坐标值的填充。
该算法运用直角坐标系下的像素点反回来找对应极坐标下的回波点,且一个像素点要找到与其对应的4个相邻的回波点,运算量比NNIA大。
若显示器像素点的个数为X个,则采用改进NNIA算法进行几何变换,需要进行两次正余弦变换和4次乘法运算。
2.2 二维线性算法二维算法中最具有代表性的算法就是R-Theta。
R-Theta算法在改进NNIA算法的基础上,消除由于舍入或截断所带来的图像失真。
R-Theta算法模型。
它也是由直角坐标的像素点对应到极坐标形式的回波点。
与改进NNIA算法不同的是,R-Theta采用二维的算法处理。
R-Theta算法如式(2)所示,其中,lAE、lBF为AE、BF距离百分比,θEP为EP角度百分比。
分析R-Theta算法的运算量,若需要确定X个像素点,每个像素点有正余弦信号的变换各一次和6次乘法运算。
由此可以看出,R-Theta算法的运算量是三种算法中运算量最大的。
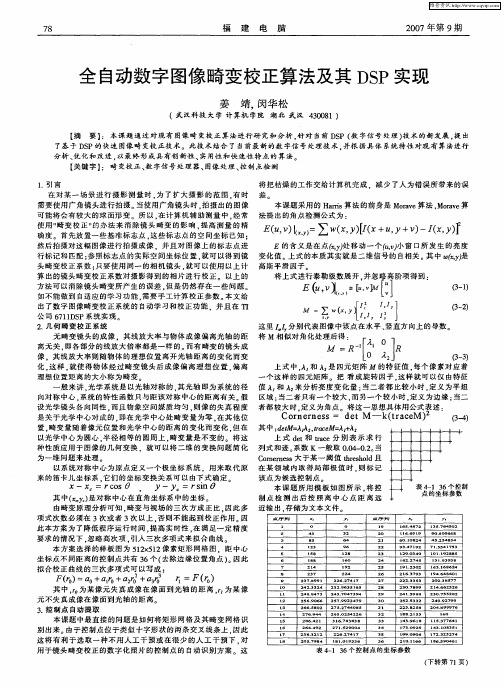
3 DSP实现及实验结果分析假设有一夹角为60°、128阵元(24阵元为一组)的B超凸阵探头(探头的半径为60 mm,扫描深度为200 mm),采集到的回波信号为256灰度级的128像素×512像素的扇形数据。
本次设计采用TMS320C64X系列的DSP。
C64X定点DSP是业界公认的处理能力最强的数字信号处理器,在工作时钟达到1 GHz时,C64X DSP的信息处理能力最高可达到8 000 MIPS。
C64X DSP除了运行在高频率的工作时钟外,还利用特殊指令功能在一个时钟周期内处理多任务。
这些特殊指令使得C64X可以更有效地应用在一些关键领域,诸如数字通信物理层信号处理及视频和图像的处理。
利用DSP的软件仿真系统实现仿真,最后将程序加载到开发板上运行,查看运行效果,分析成像精度、运算量等性能指标。
算法仿真图。
由图7可以看出,采用NNIA算法,波束与波束之间存在间隙,使得对显示器的几何变换并不连续,而且,显示器像素的位置是整数,因此坐标点计算存在舍入或截断误差。
这样,原先回波点对像素点的填充可能会被邻近回波点的值所覆盖,图像就会丢失信息产生失真。
采用改进NNIA算法,因为它采用的是由像素点对应回波,则每个像素点都能找到与其对应的像素值,不会出现像素点无值的情况,所以也就不会出现NNIA算法中出现的空缺像素点的情
况。
但由于算法本身的原因,相邻4个回波点之间可能包含多个对应的像素点,即一个区域内的多个像素点被相同的值填充,这使得图像上出现亮斑,图像的整体效果不是很好,给诊断带来不便。
R-Theta有效地避免了改进NNIA算法中的一个像素值对应多个像素点的情况,也就不会产生亮斑。
采用R-Theta减小了舍入误差和截断误差,故能得到最高的分辨率,图像更加逼真。
虽然R-Theta在以上的算法中运算量最大,但在现如今的DSP运算条件下,实验证明,采用R-Theta完全可以实现图像的实时显示,并且图像的质量也得到了有效的保证。
同时,算法很好地保留了原始信息,便于实现图像的后续处理。