非结构化道路识别方法研究
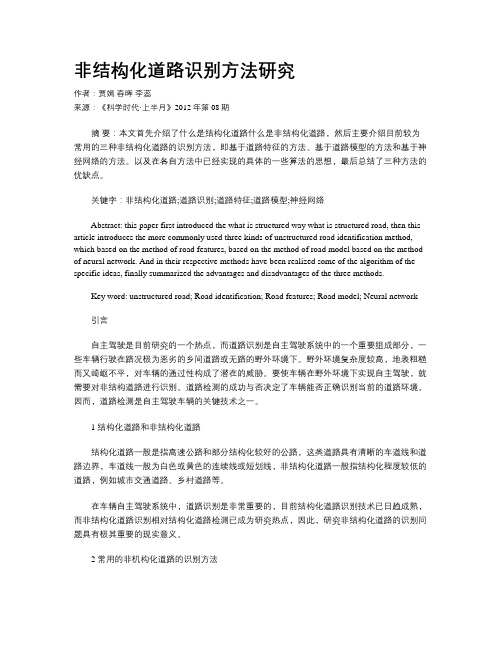
一种基于灰关联和Sobel算子的完全非结构化道路边缘检测方法

较序 列 和参考 序列 的关联 度大 小来判 断是 否为边 缘
点, 因此 边缘 点判 断 的准 确 与 否 与参 考 序 列有 很 大 的关 系 . S o b e l 算 子 是常 用 的 检测 图像边 缘 的算 子 , 用 它计算 图像 一 阶梯 度 , 而 以它作 为 模 板 对 图像 进 行 空 间域滤 波 , 其极 值就 是 图像 的边 缘 , 所 以它 在一 定 程度 上可 以反 映 图像 边缘 像 素 的分 布 特性 . 本 文 将 灰色 关联 度引入 完全 非结 构化道 路彩 色 图像 边缘 的检测 中 , 将 由彩 色 空 间 的三 维 分 量信 息 生 成 的 比 较 序列 与 由 S o b e l 算 子形成 的参 考 序列 计 算其 灰 色
像 进行 边缘检 测 , 不但 图像边缘 比较 清晰 , 而且 还 能有效 降低 图像 的噪 声. 关 键词 :彩 色图像 ; 边缘 检测 ; 灰 关联 ; S o b l e算子
中 图 分 类 号 :T P 3 9 1 文 献 标 识 码 :A 文章 编号 : 1 6 7 1 —1 1 9 X( 2 0 1 3 ) 0 1 —0 0 4 2 —0 3
化 道路.
如何 从彩 色 图像 中获得道 路 的信 息是 基 于视觉 的道路检 测 的关键 . 由 于道 路 处 于真 实 的 自然环 境 中, 摄像 机获得 的图像 往 往 受 各 种环 境 因素 的影 响 而 退化. 另外 , 由于 完全非 结构 化道路 图像 的某 些特
关 联度 , 生成 色彩 分量灰 关联 度 图像 , 然 后进 行道路 彩色 图像边缘 检 测. 实验 表 明 , 该算 法充 分利 用 了实 时彩色 道路 图像 , 具有 较高 的精确 性和 实时性 .
非结构化道路识别方法研究
非结构化道路识别方法研究作者:贾嫣春晖李蕊来源:《科学时代·上半月》2012年第08期摘要:本文首先介绍了什么是结构化道路什么是非结构化道路,然后主要介绍目前较为常用的三种非结构化道路的识别方法,即基于道路特征的方法、基于道路模型的方法和基于神经网络的方法。
以及在各自方法中已经实现的具体的一些算法的思想,最后总结了三种方法的优缺点。
关键字:非结构化道路;道路识别;道路特征;道路模型;神经网络Abstract: this paper first introduced the what is structured way what is structured road, then this article introduces the more commonly used three kinds of unstructured road identification method, which based on the method of road features, based on the method of road model based on the method of neural network. And in their respective methods have been realized some of the algorithm of the specific ideas, finally summarized the advantages and disadvantages of the three methods.Key word: unstructured road; Road identification; Road features; Road model; Neural network 引言自主驾驶是目前研究的一个热点,而道路识别是自主驾驶系统中的一个重要组成部分,一些车辆行驶在路况极为恶劣的乡间道路或无路的野外环境下。
基于机器视觉的非结构化道路检测算法研究

移动机器人 的核心技 术之 一是导航 技术 , 别是 自主 特 导航技术 。由于环境 的动态变 化和不 可预测 性 、 机器 人感
知 手段 的不 完 备 等 原 因 , 使得 移 动 机 器 人 的 导 航 难 度 较 大 ,
sm ua in r u ti d c t st a h sun t c u e t xa i to t d ha o d c r c eitc ftme e sa i lto es l n i ae h tti sr t r d pah e m nain meho s g o haa trsiso i ls nd u
Absr t: A i d o sr c u e o d d tc in ag rtm ih a mp o e e ltm edee to n c u a yi t ac k n fun tu t r d r a ee to lo h wh c h si r v d r a —i tci n a d a c r c s i i rd e nto uc d.Fis , h rgna m a e ae p o e s d b din—itrn a d an o nos s u r s e a n r t t e o i l i g s r r c s e y me a fle i g, n r d m ie i s pp e s d, nd a i Otu lit e h l g rt m sc o e a e n t pe k meho o a i ma e s mu t—hr s o d a o ih i h s n b s d o wo— a t d frr p d i ges gme t t n,h e me a in l n ai t e s g ntto o
智能车辆中非结构化道路检测技术的研究

用 算法 对 实 际 的非 结 构 化 道 路 图像 在 maa t b软 件 平 台 进行 了仿 真实 验 ,证 明算 法 具 有 一 定 的 实 用性 . l
关 键 词 :非 结 构 化 道 路 ;数 学 形 态 学 ;分 水 岭 分 割 ;标 记
中 图分 类号 :U 9 ;T 3 1 4 1 P 9 文 献 标 识 码 :A
成 部 分 之 一 . 道 路 分 为 :结 构 化 道 路 和 非 结 构 化 道 路 . 非 结 构 化 道 路 指 结 构 化 程 度 较 低 的 道 路 , 包
素 较 多 ,在 非 常 复 杂 环 境 下 有 非 常 艰 巨 的 工 作 和 研
究意 义 .
括 :城 市街巷 、沙 石路 、乡村 道路 和越野环 境道 路
赵俊梅 , 张 利平
00 5 ) 3 0 1 ( 中北 大学 信 息 与 通 信 工 程 学 院 , 原 太
摘 要 : 于非 结 构 化 道 路 环 境 复 杂 的特 点 ,非 结 构 化 道 路 边 界 检测 和分 割对 于智 能 车 辆 的道 路 检 测 和 识 别 是 非 由 常 重要 的 .针 对 非 结 构 化 道 路 多 样 性 和 复 杂 性 ,首 先 对 道 路 图像 进 行 HI 间 变 换 ,减 少 光 照 条 件 的影 响 . 通 S空 过 利用 基 于标 记 的分 水 岭 分 割 算 法 对 道 路 图像 进 行 处 理 , 比 较 几 种 标 记 算 法 ,数 学 形 态 学 效 果 最 佳 . 最 后 ,利
Absr c t a t: Be a s o is c mp iae fa u e , t e b u d r d tci n a d s g e t t n o a c u e f t o lc t d e t r s h o n a y ee to n e m n a i f n o u sr c u e r a i v r i p ra t o i tlie t e il s n te o d d t cin a r c g to n tu t r d o d s e y m o tn f r nelg n v h ce i h r a ee to nd e o ni n. i
基于彩色图像信息提取的非结构化道路检测算法

2 算 法流 程
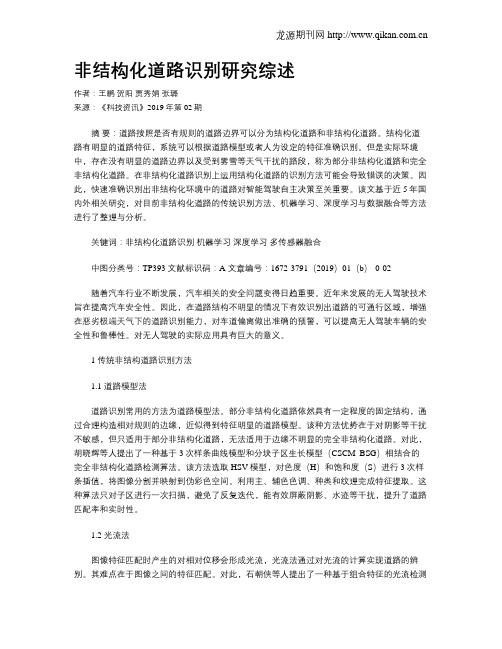
如图1 所示 , 算法 主要包 括4 模块 : 个 第一 个模 块 为 图像 假 设, 根据 假设 提 取路 面 的标 准颜 色 ; 二个 模 块为 提取 每个 图 第 像 与标 准颜 色的色 度差 ; 三个模 块对前 一个 流程 中提取 的 图 第 像 进 行处 理 , 用 Os 最 大类 问 方差 法 进行 颜 色分 割 , 到二 利 tu 得 值 化 图像 : 四个 模块是 利用 形态学 滤波 的原理 填充 孔洞 并经 第 过 道路路 面连 通性检 测后 , 到最后 所需 要的 图像 。 得
非结 构化道 路包 括乡村 小路 等等 . 其路 况增加 了检 测 的难
度 : 有 车道 线或者 标记 ; 与非路 的边 界模糊 ; 路 形状 不够 没 路 道
输入 图像
平 滑 。传统 算法 图像 的要求严 格 , 同时对 于非 结构 化道 路情 况
下 的大 面积阴影 及水 渍没 有太好 的处理 效果 。 文介绍 了一种 本 基 于彩色 图像 的非结构 化道 路路 面检测算 法 , 其基 本思路 是利 用 道路 路 面颜 色 的统一 且路 面 颜 色与 背景颜 色 差别 较 大 的特 点进 行 颜 色分 割 而得 出路 面 区域 , 有鲁 棒性 好 、 确度 高 的 具 精
包舍路 面信息 的 图像
图1 算 法 流 程
L a b 色彩模 型是 由照度 ( ) 有关 色彩 的a b 个 要素 组 牛 术 L和 ,3
成 。L 示 亮 度 u nst) 相 当 于 亮 度 ,表 示 从 红 色 至 绿 色 表 L mioi , y a
的范 围 ’表示 从 蓝色 至黄 色 的范 围 。L b 的值 域 由0 10 L 5 到 0 ,=0
非结构化道路识别研究综述
非结构化道路识别研究综述作者:王鹏贺阳贾秀娟张璐来源:《科技资讯》2019年第02期摘要:道路按照是否有规则的道路边界可以分为结构化道路和非结构化道路。
结构化道路有明显的道路特征,系统可以根据道路模型或者人为设定的特征准确识别。
但是实际环境中,存在没有明显的道路边界以及受到雾雪等天气干扰的路段,称为部分非结构化道路和完全非结构化道路。
在非结构化道路识别上运用结构化道路的识别方法可能会导致错误的决策。
因此,快速准确识别出非结构化环境中的道路对智能驾驶自主决策至关重要。
该文基于近5年国内外相关研究,对目前非结构化道路的传统识别方法、机器学习、深度学习与数据融合等方法进行了整理与分析。
关键词:非结构化道路识别机器学习深度学习多传感器融合中图分类号:TP393 文献标识码:A 文章编号:1672-3791(2019)01(b)-0-02随着汽车行业不断发展,汽车相关的安全问题变得日趋重要。
近年来发展的无人驾驶技术旨在提高汽车安全性。
因此,在道路结构不明显的情况下有效识别出道路的可通行区域,增强在恶劣极端天气下的道路识别能力,对车道偏离做出准确的预警,可以提高无人驾驶车辆的安全性和鲁棒性。
对无人驾驶的实际应用具有巨大的意义。
1 传统非结构道路识别方法1.1 道路模型法道路识别常用的方法为道路模型法。
部分非结构化道路依然具有一定程度的固定结构,通过合理构造相对规则的边缘,近似得到特征明显的道路模型。
该种方法优势在于对阴影等干扰不敏感,但只适用于部分非结构化道路,无法适用于边缘不明显的完全非结构化道路。
对此,胡晓辉等人提出了一种基于3次样条曲线模型和分块子区生长模型(CSCM_BSG)相结合的完全非结构化道路检测算法。
该方法选取HSV模型,对色度(H)和饱和度(S)进行3次样条插值,将图像分割并映射到伪彩色空间。
利用主、辅色色调、种类和纹理完成特征提取。
这种算法只对子区进行一次扫描,避免了反复迭代,能有效屏蔽阴影、水迹等干扰,提升了道路匹配率和实时性。
基于MATLAB图像处理的非结构化道路识别

2 0 1 4年 ( ) 4月
机 械 工 程 与 自 动 化
ME CHANI CAI ENGl NEERl NG & AUT( ) M ATl ( ) N
No .2 Apr .
文章编号 : l 6 7 2 — 6 4 1 3 ( 2 0 1 4 ) 0 2 — 0 0 3 2 — 0 2
识 别 程 度 的优劣 。假 设需 要处 理 的彩 色图像 是 一个 二 值 灰 度 图像 , 其 灰度级 h = = : { 0 , 1 , 2 , …} , 阀值 t ∈h , 二
大 津 法 处 理 后 的 二值 图像
值 化 处理 的结 果 为 B, B一 { b 。 , b } 。则 图 像 _ 厂二值 化
化 道路 的识 别问 题具 有重 要 的意义 。非 结构 化道路 没
有 明显 的分界 线 , 识 别 具 有 一定 的难 度 。但 在 许 多 情 况下 , 非 结构 化道 路 环境 中道 路 部 分 与非 道路 部 分 在 颜 色方 面差异 性 较大 , 本 文 正 是 考 虑使 用 颜 色 这 个 相 关 特征 来 对道 路 部分进 行 提取 和分离 。
道 路 区域 比较 清 楚地 被 区别 开 来 , 这 为后 续 的 图像 去 噪处 理奠 定 了基础 。
图 l 过 程 中 , 关 键 问题 是 阀 值 的 选 择 是 否得 当, 阀值 选 择 的 合 理 与 否直 接 关 系 到 道 路
图像 处 理系统 中 。
在 实际应 用 中 , 阀值 t 一般使 用式 ( 2 ) 来选 取 : r —A r g ( Ma x E T x o , ( ) ×乞 £ ・ l ( ) > < ( “ ( f ) 一‰( f ) ) ・
非结构化道路区域检测的协同学习方法
非结构化道路区域检测的协同学习方法在现代交通领域中,非结构化道路区域的检测一直是一个具有挑战性的问题。
非结构化道路通常缺乏清晰的车道线、标志和规则的路面形态,这使得准确检测其区域变得困难重重。
为了应对这一挑战,协同学习方法应运而生,为非结构化道路区域的检测提供了新的思路和解决方案。
首先,我们来了解一下什么是非结构化道路。
非结构化道路可以是乡村小道、未铺设的土路、山区的崎岖山路,或者是城市中的施工区域等。
这些道路没有明确的划分和标准化的标识,路面状况复杂多变,可能有坑洼、凸起、杂物,甚至会有临时的障碍物。
这与我们常见的结构化道路,如高速公路、城市主干道等,形成了鲜明的对比。
传统的道路检测方法在面对非结构化道路时往往力不从心。
例如,基于图像特征的方法可能会受到光照、阴影、天气等因素的影响,导致检测结果不准确。
而基于深度学习的方法虽然在一定程度上提高了检测性能,但仍然存在一些局限性,比如对小样本数据的泛化能力不足,或者在复杂场景下容易出现误判。
那么,协同学习方法是如何发挥作用的呢?协同学习强调的是多个学习主体之间的相互协作和信息共享。
在非结构化道路区域检测中,我们可以将不同类型的传感器,如摄像头、激光雷达、毫米波雷达等,看作是不同的学习主体。
这些传感器各自具有独特的优势和局限性,通过协同学习,可以实现优势互补,提高检测的准确性和可靠性。
以摄像头和激光雷达为例。
摄像头能够获取丰富的图像信息,包括道路的颜色、纹理和形状等,但在距离测量和恶劣天气条件下的表现不佳。
激光雷达则可以精确地测量物体的距离和形状,不受光照和天气的影响,但获取的信息相对较为稀疏。
通过将摄像头和激光雷达采集到的数据进行融合和协同学习,我们可以利用摄像头的图像信息来补充激光雷达数据的细节,同时利用激光雷达的精确距离测量来校正摄像头的视觉误差。
在协同学习中,数据融合是一个关键环节。
数据融合的方法有很多种,常见的有早期融合、中期融合和晚期融合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
非结构化道路识别方法研究
摘要:本文首先介绍了什么是结构化道路什么是非结构化道路,然后主要介绍目前较为常用的三种非结构化道路的识别方法,即基于道路特征的方法、基于道路模型的方法和基于神经网络的方法。
以及在各自方法中已经实现的具体的一些算法的思想,最后总结了三种方法的优缺点。
关键字:非结构化道路;道路识别;道路特征;道路模型;神经网络
Abstract: this paper first introduced the what is structured way what is structured road, then this article introduces the more commonly used three kinds of unstructured road identification method, which based on the method of road features, based on the method of road model based on the method of neural network. And in their respective methods have been realized some of the algorithm of the specific ideas, finally summarized the advantages and disadvantages of the three methods.
Key word: unstructured road; Road identification; Road features; Road model; Neural network
引言
自主驾驶是目前研究的一个热点,而道路识别是自主驾驶系统中的一个重要组成部分,一些车辆行驶在路况极为恶劣的乡间道路或无路的野外环境下。
野外环境复杂度较高,地表粗糙而又崎岖不平,对车辆的通过性构成了潜在的威胁。
要使车辆在野外环境下实现自主驾驶,就需要对非结构道路进行识别。
道路检测的成功与否决定了车辆能否正确识别当前的道路环境。
因而,道路检测是自主驾驶车辆的关键技术之一。
1 结构化道路和非结构化道路
结构化道路一般是指高速公路和部分结构化较好的公路,这类道路具有清晰的车道线和道路边界,车道线一般为白色或黄色的连续线或短划线,非结构化道路一般指结构化程度较低的道路,例如城市交通道路、乡村道路等。
在车辆自主驾驶系统中,道路识别是非常重要的,目前结构化道路识别技术已日趋成熟,而非结构化道路识别相对结构化道路检测已成为研究热点,因此,研究非结构化道路的识别问题具有极其重要的现实意义。
2 常用的非机构化道路的识别方法
非结构化道路没有车道线和清晰的道路边界,道路的形状多种多样,路面的等级较低,道路周边的环境复杂,使得道路区域和非道路区域的区分有很大难度。
再者,高光、相互反射等问题在非结构化道路中仍然存在,这就使得非结构化道路检测技术研究面临很大的困难。
目前,针对非结构化道路的道路检测技术尚处于研究阶段[1] [2]。
目前来说,针对非结构化道路的检测算法主要有三种:基于道路特征的方法、基于道路模型的方法和基于神经网络的方法。
2.1基于道路特征的方法
基于道路特征的方法主要包括基于区域特征的方法和基于边缘特征的方法。
前者是通过道路区域和背景区域像素点之间色彩、纹理、亮度等的差异来划分。
一般对非结构化道路采用这种算法比较好。
后者基于边缘特征的方法是通过路面和非路面之间的特征突变来寻找道路边缘,再通过道路边缘识别识别道路区域,但对于非结构化道路的边缘不够清晰的情况下此种算法不适用,针对于此,将区
域法和边缘特征法结合起来取各自的长处进行非结构化道路的识别。
例如程洪,郑南宁等提出了一种基于图像非同质性特征和几何模型的道路识别方法[3]。
该算法将计算得到图像局部方差与不连续性特征进行融合获得图像的非同质性特征,利用比例直方图法得到的阈值自适应地对上述结果二值化,然后用鲁棒M 估计器估计样条拟合的最优控制点,进而用3点Catmull-Rom样条拟合处道路边界。
2.2 基于道路模型的方法
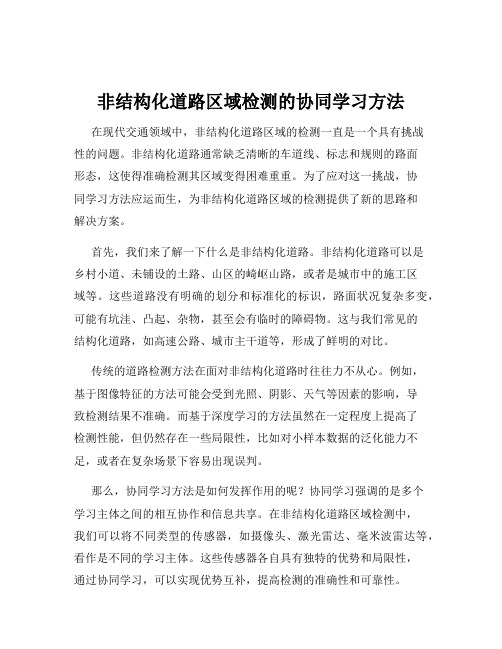
首先假设出道路模型,然后根据图像找出最匹配的道路模型。
例如,清华大学以THMR-V 型移动机器人为试验平台在校内公路上进行了非结构化道路的识别研究,实现了较好的识别效果,试验图片如上图所示。
该方法假设道路相对平坦并且具有直线型的道路边界,首先运用2*2 模板对图像进行模糊化处理,减小数据量的同时消除地面裂纹的影响,然后使用灰度级数学形态学算子来增强和提取图像边缘,利用区域标注将图像分割成互不相通的几部分,并通过判断区域中心是否在所设定的道路模型上来判定该区域是否是道路部分。
整个算法耗时81ms。
由于实施了模糊预处理,因此这种方法丢失了一些边缘信息,且没有利用路面颜色的连续性这一信息[4]。
2.3 基于神经网络的方法
利用神经网络的学习特性来实现对道路的识别。
例如,吉林大学的刘子辉等,利用BP神经网络实现了非结构化道路的识别算法,算法根据实际采集的图片样本,利用熵、能量等纹理特征值作为具有恰当结构的BP 网络的输入层,隐层设置有20 个节点,输出层设置 1 个节点来进行网络的训练。
训练完成后得到网络的权值矩阵和阈值矩阵,然后将待判别图片中的每一个10× 10 区域的纹理特征值依次送至BP 网络的输入层,经过运算判别小区域的属性,直至完成整幅图像所有区域的判别[5]。
3 各种非结构化道路识别方法优缺点的比较
各种非结构化的道路识别方法都有各自的优缺点,其优缺点比较如表1-1所示。
4 总结
本文主要介绍了目前较为常用的三种非结构化道路的识别方法,即基于道路特征的识别方法、基于模型的识别方法和基于神经网络的识别方法以及目前在各自方法中已经实现的具体的一些算法的思想,同时在最后总结了三种方法的优缺点。
参考文献:
[1]王京起,陈慧岩.陆地自主车辆研究概况[J] .车辆与动力技术,2000(9):56-61
[2]邵亮.基于FPGA 和嵌入式系统的实时图像处理[D].杭州:浙江大学,2005
[3]程洪,郑南宁,赵莉,李青.一种基于图像非同质性特征和几何模型的道路识别方法[J],西安交通大学学报.2004(38):384-387
[4] Yang Ming,Lu Jianye,etc. Vision-based real-time Vehicle Guidance onTHMR-V Part I:Unstructured Road Detection[C]. Proceedings of theInternational Symposium on Test and Measurement(ISTM’01),Shanghai,June 1-3,2001,V ol. 1:365-368
[5]刘子辉,军用无人驾驶车辆非结构化道路识别方法研究[D]:吉林;吉林大学,2007.。