多旋翼无人机精细化巡检技术方案设计介绍
输电线路多旋翼无人机智能检修方法
随着我国国内经济和电力能源的联动发展,输电线路相关功能需求越来越多。
电力资源的发展和支持为社会的发展奠定了坚实有力的基础。
为了满足国内对电力越来越高的需求,国家电网在电力线路和高电压、大容量方向上继续扩大规模和完善。
当一些大型复杂的输电线路发生故障时,需要更多的人力、物力进行检修,对故障区域进行选取时会消耗大量时间。
输电线路的隐藏缺陷因分布的不同而有所差异。
多旋翼无人机使用时速度快、耗时短且准确率高,更适合现代智能电网下的检修的硬核要求。
与传统方法相比,常用的电力线路检修方法存在较大误差、人员多和工作量大,效率较低的问题,而多旋翼无人机的人机设备联动检修方法可对较长线路进行大范国快速信息查询,并对区域进行精准识别。
为了解决输电线路中人工作业和常规检测不足的问题,该文提出了通过无人机红外影像技术,然以算法计算出故障点范围并进行线路故障特征提取,来完成对输电线路的维修。
输电线路多旋翼无人机智能检修方法李 辉(新疆送变电有限公司,新疆 乌鲁木齐 830000)摘 要:常规输电线路检修方法对故障检修存在误差,误判率较高,因此该文提出了通过多旋翼智能技术对输电线路进行检修的方法。
首先通过无人机红外影像技术采集故障区域图像,分别通过密集读取与提取、偏心度区域提取来计算故障区域。
区域进行识别后对该区域下的故障线路进行聚类分析,计算出目标函数最小值。
然后通过分析目标函数最小值提取输电线路故障特征,确定具体故障并提出维修方案。
最后通过对比试验,将无人机智能检修方法与人工识别检修、单一机械识别检修方法进行对比,验证了在其他条件一样的情况下,该文方法对故障识别的误判率最低,更具备可用性。
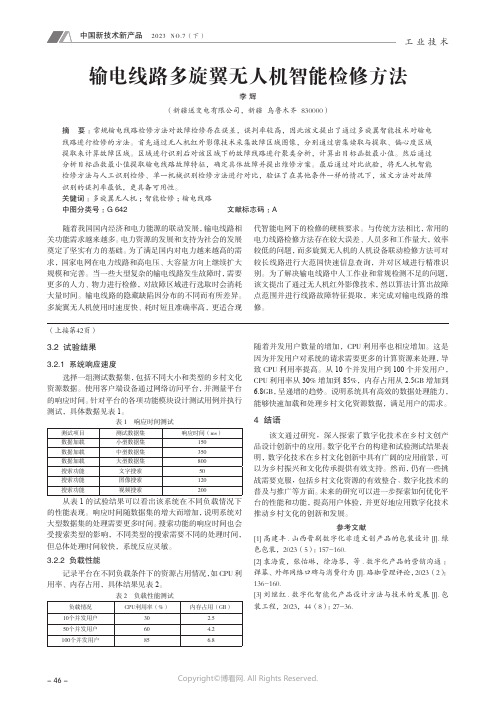
关键词:多旋翼无人机;智能检修;输电线路中图分类号:G 642 文献标志码:A3.2 试验结果3.2.1 系统响应速度选择一组测试数据集,包括不同大小和类型的乡村文化资源数据。
使用客户端设备通过网络访问平台,并测量平台的响应时间。
针对平台的各项功能模块设计测试用例并执行测试,具体数据见表1。
多旋翼无人机精细化巡检技术方案介绍

多旋翼无人机粗细化巡检之阳早格格创做多旋翼无人机粗细化巡检常常应用于220kV及以上输电线路的架空输电线路巡检,主要巡检办法为拍照、录像等办法举止巡检,巡检的主要真量为杆塔本量及附属办法闭键部位可睹光拍照巡检并提接巡检所创造缺陷及相闭报告.第一部分:无人机粗细化巡检真量常常情况下多旋翼无人机粗细化巡检(可睹光拍摄)的主要巡检对于象犹如下7类.1、导天线有无缺陷或者非常十分;2、线路金具备无缺陷或者非常十分(甲圆若央供隔断棒需巡检,可使无人机退却到一定距离以拍摄通讲的办法举止拍摄);3、绝缘子及绝缘子串有无缺陷或者非常十分;4、附属办法有无缺陷或者非常十分;5、通讲及接叉超过有无缺陷或者非常十分;6、前提天量环境有无缺陷或者非常十分;7、杆塔本量运止情景.第两部分:巡检央供多旋翼正在包管最小仄安距离10m的情况下,通过无人机对于杆塔各个巡检部位举止可睹光拍摄,照片像素为2400万,最后成像效验能浑晰辨别出螺栓及启心销细节,并根据架空输电线路本量运止情况并分离分歧塔型做业体味咱们将架空输电线路粗细化巡检的照片数量划定为单回路直线塔起码14弛、单回路耐弛塔起码27弛、单回路直线塔起码25弛、多回路耐弛塔起码40弛、单回路换位塔起码30弛、单回路换位塔起码50弛.下表仅以单回路“导线排列办法以火仄排列办法”塔型及战单回路“搞”字型及取“搞”字型塔相似塔型为例证明仔细拍摄部位及巡检效验.单回路杯型直线塔为例起码包罗14弛照片(杯型直线塔为例,前提天量环境已计进)单回路直线塔起码包罗26弛照片(搞字型塔为例,前提天量环境已计进).第三部分:数据资料及报告1、数据资料巡检数据处理依照统一尺度圆法:线路称呼(**kV**线)、杆塔编号(**号)逐级修坐文献夹归档存搁.例:假设有单回路220kV洋单线Ⅰ线无人机粗细化巡检资料,则有例(1)所示资料文献.例1(220kV洋单线Ⅰ线20#塔无人机粗细化巡检资料)若正在巡检历程中创造缺陷将对于巡检所创造缺陷举止标注并相闭报表中体现,例(2)所示例2(假设220kV洋单线Ⅰ线20#塔中相挂面处有鸟窝1处)2、报告报告常常包罗:A、缺陷报告(可由甲圆提供圆法)真量包罗无人机粗细化巡检历程中所创造所有缺陷及非常十分情景,并对于缺陷或者非常十分情景举止归类并分解本果及成果.B、巡检做业报告(可由甲圆提出简直央供但是需甲圆提供输电线路设备疑息)包罗巡检做业任务的所有疑息,如人员、无人机、杆塔巡检仔细疑息、伤害源辨识取分解、特殊运止区段的状态分解、设备状态评介等博业报告.C、无人机巡检做业现场勘察记录单(常常由甲圆举止现场勘察)D、无人机巡检做业处事票(由甲圆挖写、签收、许可做业)附:某接流500kVxx线单回路直线塔无人机粗细化巡检照片展示500kVxx线标记牌(巡检真量包罗:标记牌有无拾得、污益、图文是可普遍性等)500kVxx线大号侧通讲环境(巡检真量包罗:大号侧通讲环境、导天线弧垂及呵护区内各项仄安距离是可谦脚线路运止尺度等)500kVxx线小号侧通讲环境(巡检真量包罗:小号侧通讲环境、导天线弧垂及呵护区内各项仄安距离是可谦脚线路运止尺度等)500kVxx线左侧天线挂面(巡检真量包罗:左侧天线挂面金具备无烧伤变形裂纹、金具螺栓有无锈蚀变形紧动、启心销有无脱降、防震锤锈蚀脱降滑移、杆塔有无同物等)500kVxx线左侧天线挂面(巡检真量包罗:左侧天线挂面金具备无烧伤变形裂纹、金具螺栓有无锈蚀变形紧动、启心销有无脱降、防震锤锈蚀脱降滑移、杆塔有无同物等)500kVxx线左侧塔头(巡检真量包罗:大小号侧导天线有无紧股断股、横担有无扭直正斜、塔材有无拾得变形、附属办法有无变形拾得脱降、杆塔有无同物、推线受力情况等)500kVxx线左侧塔头有鸟窝1处(巡检真量包罗:大小号侧导天线有无紧股断股、横担有无扭直正斜、塔材有无拾得变形、附属办法有无变形拾得脱降、杆塔有无同物、推线受力情况等)500kVxx线左相导线侧挂面(巡检真量包罗:大小号侧导天线有无紧股断股、挂面金具备无烧伤变形裂纹、金具螺栓有无锈蚀变形紧动、启心销有无脱降、均压环有无烧伤、有无同物等)500kVxx线左相导线侧挂面(巡检真量包罗:大小号侧导天线有无紧股断股、挂面金具备无烧伤变形裂纹、金具螺栓有无锈蚀变形紧动、启心销有无脱降、均压环有无烧伤、有无同物等)500kVxx线左相横担侧挂面(巡检真量包罗:绝缘子串挂面螺栓有无紧动锈蚀变形、启心销有无脱降、横担有无正斜变形、屏蔽环有无烧伤、杆塔有无同物等)500kVxx线左相横担侧挂面(巡检真量包罗:绝缘子串挂面螺栓有无紧动锈蚀变形、启心销有无脱降、横担有无正斜变形、屏蔽环有无烧伤、杆塔有无同物等)500kVxx线左相绝缘子串(巡检真量包罗:合成绝缘子伞裙有无破裂、烧伤,金具、均压环屏蔽环有无变形、扭直、锈蚀等非常十分情况、绝缘子取绝缘横担有无闪络痕迹战局部火花搁电留住的痕迹等)500kVxx线左相绝缘子串(巡检真量包罗:合成绝缘子伞裙有无破裂、烧伤,金具、均压环屏蔽环有无变形、扭直、锈蚀等非常十分情况、绝缘子取绝缘横担有无闪络痕迹战局部火花搁电留住的痕迹等)500kVxx线中相绝缘子串(巡检真量包罗:合成绝缘子伞裙有无破裂、烧伤,金具、均压环屏蔽环有无变形、扭直、锈蚀等非常十分情况、大小号侧导天线有无紧股断股、绝缘子取绝缘横担有无闪络痕迹战局部火花搁电留住的痕迹、横担有无扭直正斜、杆塔有无同物等)注:此线路其余疑息及其余相闭报表资料没有搞展示.。
多旋翼无人机在输电线路精细化巡检中的应用

多旋翼无人机在输电线路精细化巡检中的应用摘要:目前运维策略明确提出了对输电线路开展精细化巡视的运维要求,本文主要研究应用无人机开展输电线路精细化巡视工作,对现阶段用于输电线路巡视的各类机型及其优缺点进行了分析,得出多旋翼无人机较适合进行输电线路精细化巡视,并总结多旋翼无人机开展输电线路精细化巡检工作的巡检内容及要求,数据采集要求等。
根据不同的塔型制定科学合理的拍摄流程和方法,并总结归纳出了多旋翼无人机线路精细化巡检的方法。
关键字:无人机;精细化;输电线路;巡检一、前言架空输电线路巡检的主要方式为人工沿线路步行或借助交通工具,使用望远镜和红外热像仪等对线路设备和通道环境进行近距巡视和检测。
随着线路里程不断增加,人均运维长度逐年增加,现有巡检方式效率低,特别是在高山、沼泽等复杂地形以及雨雪冰冻和地震等灾害条件下人员难以到达,难以发现杆塔上部设备缺陷等缺点显得更为突出。
近年来,随着航空、遥感、以及信息处理等技术的快速发展,电力行业积极开展线路施工及运维检修新技术研究,其中无人机在线路线路巡检上方式灵活、成本低,不仅能够发现杆塔异物、绝缘子破损、防震锤滑移、线夹偏移等缺陷,还能够发现金具锈蚀、开口销与螺栓螺帽缺失、查找闪络故障点等人工巡检难以发现的缺陷,可与人工巡检方式协同配合,成为线路运检技术发展的重点方向之一。
二、应用于输电线路巡检中的各类无人机优缺点对比目前在输电线路巡检中应用成熟的无人机种类可概括为三种:固定翼无人机、无人直升机和多旋翼无人机,各类无人机均有不同的性能特点。
2.1固定翼无人机固定翼无人机的优势是:飞行速度快、续航时间长、巡检范围广、可设置航线自动飞行性;缺点是:不能对目标物进行定点拍摄、只能按照固定航线飞行灵活性差、起降场地要求高,一般野外作业很难找到合适的起降场地、成本高操作难度大,一般需要专业培训才可操作。
因此固定翼无人机只适合于大范围的灾情勘察或是快速的线路通道巡视。
2.2无人直升机无人直升机的优势是:飞行速度快、续航时间长、巡检范围广、操作灵活、可悬停,对目标进行定点拍摄;缺点是:成本极高、体积较大、结构复杂、稳定性差、操作难度大、一般需要专业培训才可操作、需要申请飞行空域、作业流程复杂、风险高。
无人机高速巡检技术解决方案
无人机高速巡检技术解决方案引言随着无人机技术的快速发展,无人机在各个领域得到了广泛的应用。
其中,无人机在高速巡检方面具有巨大的潜力和优势。
传统的高速巡检通过人工巡检,耗时耗力,并且存在较大的安全隐患。
而无人机高速巡检技术则可以实现对高速公路、铁路等线路的快速巡检,提高巡检效率和准确性,降低人工成本和风险。
本文将介绍无人机高速巡检技术的解决方案。
一、无人机选择在选择无人机时,需要考虑巡检任务的具体需求和使用环境。
常见的无人机类型有多旋翼和固定翼两种。
多旋翼无人机具有垂直起降和悬停能力,适用于低空低速巡检任务,如桥梁、隧道等。
固定翼无人机具有长航时和高速飞行的特点,适用于大范围快速巡检,如高速公路、铁路等。
根据巡检任务的需求,选择合适的无人机类型。
二、传感器选择传感器是无人机高速巡检技术中至关重要的组成部分,可以实现对巡检对象的监测和数据采集。
常见的传感器包括高清摄像头、红外相机、激光雷达等。
高清摄像头可以对巡检对象进行实时拍摄和录像,提供视觉数据。
红外相机可以实现对温度变化的监测,用于检测异常情况。
激光雷达可以实现对距离和障碍物的测量,用于避障和精确定位。
根据巡检需求,选择适合的传感器组合。
三、飞行路径规划飞行路径规划是无人机高速巡检技术中的关键环节。
通过合理规划飞行路径,可以实现对巡检区域的全面覆盖,并最大限度地提高巡检效率。
飞行路径规划考虑到包括巡检区域的形状、大小、复杂程度以及障碍物的位置等因素。
可以利用地图数据和遥感影像进行辅助规划,采用搜索算法、遗传算法等优化方法进行路径规划。
四、图像处理与数据分析通过无人机传回的图像数据,可以利用图像处理和数据分析技术对巡检对象进行分析和识别。
图像处理技术包括图像去噪、图像增强、图像配准等,用于提高图像质量和准确性。
数据分析技术包括图像识别、目标检测、异常检测等,用于实现对巡检对象的自动识别和故障检测。
通过图像处理和数据分析,可以实现对大量数据的自动处理和分析,提高数据的利用价值。
多旋翼无人机在输电线路巡检中的运用分析

多旋翼无人机在输电线路巡检中的运用分析随着科技不断进步,如今的输电线路巡检的手段也在持续升级。
无人机技术当前已经广泛应用于人们生产生活的多个层面,运用该技术代替传统输电线路巡检工作,符合当前电力工作需求。
具体巡检过程汇总,多旋翼无人机是比较常用的,可以明显提高输电线路巡检效率,减轻巡检人员压力。
标签:多旋翼无人机;输电线路巡检;运行维护我国电力事业不断进步,在电网设备运行维护上也在持续引入先进技术。
随着经济迅速发展,电网覆盖面愈加广泛,为人们生产生活带来便利,但是在输电线路巡检方面,却带来新的挑战。
传统输电线路巡检方法效率低下,不适应当前电网要求。
采用多旋翼无人机进行巡检,可迅速发现输电线路运维问题,提高巡检效率和安全性。
一、无人机概述无人机,也就是无人驾驶飞机,由无线电遥控设备和程序控制装置进行曹总,或者由车载计算机进行间歇自主操作。
无人机比较适合危险、肮脏、较为简单的任务。
在当前民用领域,无人机与各个行业相结合,在农业、航拍、环保、运输、救援、巡检等方面得到广泛应用[1]。
在电力巡检方面,因传统巡检方式完全依靠工作人员进行,效率较低,安全性差,而无人机技术就是一种安全可靠的巡检方式,让巡检的安全性和效率大大提高,并且在经济效益方面也做出贡献,能够较大限度地节省资源。
当前较为常用的电力巡检无人机为多旋翼无人机,如图1所示。
二、多旋翼无人机的技术指标(一)性能指标多旋翼无人机是目前常规使用机型,总量一般5~10千克,也有少数质量更大的类型。
多旋翼无人机的飞行速度可达60km/h,在飞行过程中可以做到悬停观察。
多旋翼无人机因自身重量原因,续航时间一般在30分钟到1小时左右。
多旋翼无人机的抗风能力较好,当风力在六级一下时,都可以做到正常飞行。
多旋翼无人机可携带重量不超过2kg,因此其可携带的设备要严格控制质量[2]。
当多旋翼无人机发生故障,只要将故障零部件拆卸即可完成维修,维修简便省时。
(二)可操作性多旋翼无人机的操作一般由两人共同完成。
无人机巡查综合解决方案设计与实施

无人机巡查综合解决方案设计与实施一、引言随着科技的不断发展,无人机技术在各个领域得到了广泛的应用,其中之一便是巡查工作。
传统的巡查方式存在许多弊端,如效率低、成本高、安全风险大等。
为了解决这些问题,设计和实施一种高效、安全的无人机巡查综合方案变得尤为重要。
二、设计无人机巡查综合方案的要素1. 具体巡查需求分析在设计无人机巡查综合方案之前,需要对巡查的具体需求进行详细分析。
包括巡查的范围、频率、时间安排等因素,以及巡查的目标和要求。
只有充分了解巡查的需求,才能有效设计出满足这些需求的方案。
2. 无人机选型和装备选择根据巡查需求,选择适合的无人机型号和相关装备。
无人机的性能、稳定性、飞行时间以及搭载设备的先进性和可靠性等,都是选择无人机的重要因素。
同时,根据具体巡查任务的特点,选择合适的传感器和设备,如红外相机、高清摄像机、气体检测仪等,以满足不同的巡查需求。
3. 系统集成与协同控制无人机巡查综合方案的设计还需要考虑系统的集成和协同控制。
将无人机、地面控制站、数据处理和分析系统等有机地结合起来,实现信息的实时传输与交互,以及对无人机的远程操控和监控。
同时,要保证各个部分的稳定性、可靠性和相互协同性,以确保方案的有效实施。
4. 数据采集与分析无人机巡查的一个重要目标就是采集有关巡查区域的数据,这些数据可以帮助分析和评估巡查情况,为后续决策提供参考。
因此,在设计无人机巡查综合方案时,需要考虑如何高效地采集数据,并在数据处理和分析方面进行充分的规划。
借助先进的算法和软件工具,对巡查数据进行处理和分析,提取出有价值的信息,为巡查结果的评估和改进提供参考。
三、无人机巡查综合方案的实施步骤1. 方案试点和验证在实施无人机巡查综合方案之前,应先进行试点和验证。
选择一部分典型的巡查任务进行试点,通过对试点结果的评估和分析,验证方案的可行性和有效性。
根据试点结果做出相应的调整和优化,以确保方案能够实现预期的效果。
2. 人员培训与操作规程无人机巡查综合方案的实施也需要考虑人员培训和操作规程的制定。
无人机巡查标准化服务方案设计与实施

无人机巡查标准化服务方案设计与实施无人机(Unmanned Aerial Vehicle,简称UAV)作为一种新兴的无人飞行器,具备高度灵活性和多样化的功能,被广泛应用于各个领域。
在巡查服务方面,无人机的使用为任务执行者提供了更高效、更安全的选择。
为了确保无人机巡查服务的高质量和标准化,需要进行详细的方案设计和实施计划。
一、无人机巡查标准化服务方案设计为了确保无人机巡查服务的高质量和稳定性,我们需要有一个清晰的服务方案设计。
以下是无人机巡查标准化服务方案设计的几项关键内容:1. 目标确定:要设计一个标准化的无人机巡查服务方案,首先需要明确具体的巡查目标。
无人机巡查可以应用于许多领域,如农业、环境监测、城市管理等。
确定巡查目标是为了更好地设计巡查路线、选择适合的设备和传感器。
2. 设备选择:根据巡查目标的不同,选择适合的无人机设备是非常重要的。
无人机设备应具备适当的载重能力、飞行时间和操控性能。
此外,传感器和摄像设备也需要根据巡查任务的需求进行选择。
例如,在环境监测领域,适用于测量空气质量的传感器将是必需的。
3. 巡查路线规划:设计巡查路线是确保无人机在巡查任务中高效运行的关键。
通过合理规划巡查路线,可以最大程度地覆盖巡查区域,并确保无人机在飞行过程中的安全性。
同时,巡查路线的设计还需考虑如何避免障碍物、调整高度和速度等因素。
4. 数据存储和分析:无人机巡查产生的数据需要进行有效的存储和分析。
设计一个合适的数据存储系统可以确保数据的安全性和易于检索。
同时,对收集到的数据进行分析可以提供更多有关巡查目标的信息,帮助优化巡查策略和提升巡查效果。
5. 人员培训和准备:除了系统的设计,无人机巡查的标准化服务还需要相关人员的培训和准备。
无人机操作员需要具备相关的飞行许可证和飞行技能,同时还应具备一定的专业知识,能够熟练操作无人机,并在紧急情况下做出正确决策。
二、无人机巡查标准化服务方案实施实施无人机巡查标准化服务方案需要一系列的步骤和措施。
多旋翼无人机自主巡检关键技术研究

多旋翼无人机自主巡检关键技术研究摘要:基于目前多旋翼无人机广泛应用于输电线路电力巡检的背景,从功能设计、自动避障、路径规划三个方面讨论多旋翼无人机自主巡检关键技术。
研究设计多旋翼无人机自主巡检控制功能模块并划分无人机巡检工作状态,然后分析无人机自动避障原理及搭载多元化传感器避障的传感器选型依据,阐述多种无人机路径规划算法的核心原理并进行了优劣性对比。
关键词:无人机;电力巡检;自主避障;路径规划中图分类号:F452.3文献标识码:A1无人机平台介绍1.1六旋翼无人机平台多旋翼无人机可在任意地点垂直起降,不需要固定翼起飞的助推,无须滑行降落,对作业地点的要求低、适应性强、机械结构简单、易于维护[1]。
无人机在执行特种设备巡检的任务时应该满足以下要求:(1)无人机能稳定地垂直起飞与降落;(2)应对港口使用环境,无人机能稳定悬停,抗5级风(3)无人机携带云台相机,能在地面控制拍照;(4)操作方便,稳定性高。
系统选用六旋翼无人机作为空中巡检平台,如图1所示。
图1六旋翼空中巡检无人机经过实地测试,无人机能抗5级风力,可以垂直起降,仅对场地要求有一小块平地即可。
性能指标如表1所示。
表1无人机空中巡检平台技术指标参数技术指标参数值起飞质量/kg8.5轴距/mm800续航时间/min20抗风等级/级5桨叶半径/cm152多旋翼无人机自主巡检总体方案2.1自主巡检主体模块设计自主巡检的关键是整合处理多方面的输入信息,比如无人机自身的姿态信息、无人机飞行周遭环境信息,同时结合多方面控制指令,比如来自无人机遥控器的控制指令、来自地面段的控制指令、控制系统设定的控制指令,实现自主飞行和数据采集。
2.2多旋翼无人机飞行工作状态为了方便对自主飞行技术的讨论,本文将无人机的飞行姿态划分为几个工作状态:稳定飞行工作状态、悬停飞行工作状态、绕行工作状态以及自动飞行工作状态。
稳定飞行工作状态,即无人机最基本的工作状态,指无人机起飞、降落及没有意外地按固定轨迹航行;悬停飞行工作状态,是多旋翼无人机区别于固定翼无人机特有的工作状态,可以定点采集数据,并且可以在悬停的同时调整机身姿态;绕行工作状态,发生在判断前方有障碍物或其他类型干扰时,即临时调整航线的状态;自动飞行状态则得益于避障、定点算法[3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多旋翼无人机精细化巡检
多旋翼无人机精细化巡检通常应用于220kV及以上输电线路的架空输电线路巡检,主要巡检方式为拍照、录像等方式进行巡检,巡检的主要内容为杆塔本体及附属设施关键部位可见光拍照巡检并提交巡检所发现缺陷及相关报告。
第一部分:无人机精细化巡检内容
通常情况下多旋翼无人机精细化巡检(可见光拍摄)的主要巡检对象有如下7类。
1、导地线有无缺陷或异常;
2、线路金具有无缺陷或异常(甲方若要求间隔棒需巡检,可使无人机后
退到一定距离以拍摄通道的方式进行拍摄);
3、绝缘子及绝缘子串有无缺陷或异常;
4、附属设施有无缺陷或异常;
5、通道及交叉跨越有无缺陷或异常;
6、基础地质环境有无缺陷或异常;
7、杆塔本体运行状况。
第二部分:巡检要求
多旋翼在保证最小安全距离10m的情况下,通过无人机对杆塔各个巡检部位进行可见光拍摄,照片像素为2400万,最终成像效果能清晰分辨出螺栓及开口销细节,并根据架空输电线路实际运行情况并结合不同塔型作业经验我们将架空输电线路精细化巡检的照片数量划定为单回路直线塔至少14张、单回路耐张塔至少27张、双回路直线塔至少25张、多回路耐张塔至少40张、单回路换位塔至少30张、双回路换位塔至少50张。
下表仅以单回路“导线排列方式以水平排列方式”塔型及和双回路“干”字型及与“干”字型塔相似塔型为例说明详细拍摄部位及巡检效果。
单回路杯型直线塔为例至少包含14张照片(杯型直线塔为例,基础地质环境未计入)
双回路直线塔至少包含26张照片(干字型塔为例,基础地质环境未计入)。
第三部分:数据资料及报告
1、数据资料
巡检数据处理按照统一标准格式:线路名称(**kV**线)、杆塔编号(**号)逐级建立文件夹归档存放。
例:假设有单回路220kV洋双线Ⅰ线无人机精细化巡检资料,则有例(1)所示资料文件。
例1(220kV洋双线Ⅰ线20#塔无人机精细化巡检资料)
若在巡检过程中发现缺陷将对巡检所发现缺陷进行标注并相关报表中体现,例(2)所示
例2(假设220kV洋双线Ⅰ线20#塔中相挂点处有鸟窝1处)
2、报告
报告通常包含:
A、缺陷报告(可由甲方提供格式)
内容包含无人机精细化巡检过程中所发现所有缺陷及异常状况,并对缺陷或异常状况进行归类并分析原因及成因。
B、巡检作业报告(可由甲方提出具体要求但需甲方提供输电线路设
备信息)
包含巡检作业任务的所有信息,如人员、无人机、杆塔巡检详细信息、危险源辨识与分析、特殊运行区段的状态分析、设备状态评
价等专业报告。
C、无人机巡检作业现场勘察记录单(通常由甲方进行现场勘察)
D、无人机巡检作业工作票(由甲方填写、签发、许可作业)
附:某交流500kVxx线单回路直线塔无人机精细化巡检照片展示
500kVxx线标识牌(巡检内容包含:标识牌有无丢失、污损、图文是否一致性等)
500kVxx线大号侧通道环境(巡检内容包含:大号侧通道环境、导地线弧垂及保护区内各项
安全距离是否满足线路运行标准等)
500kVxx线小号侧通道环境(巡检内容包含:小号侧通道环境、导地线弧垂及保护区内各项
安全距离是否满足线路运行标准等)
500kVxx线右侧地线挂点(巡检内容包含:右侧地线挂点金具有无烧伤变形裂纹、金具螺栓
有无锈蚀变形松动、开口销有无脱落、防震锤锈蚀脱落滑移、杆塔有无异物等)
500kVxx线左侧地线挂点(巡检内容包含:左侧地线挂点金具有无烧伤变形裂纹、金具螺栓有无锈蚀变形松动、开口销有无脱落、防震锤锈蚀脱落滑移、杆塔有无异物等)
500kVxx线右侧塔头(巡检内容包含:大小号侧导地线有无松股断股、横担有无扭曲歪斜、塔材有无丢失变形、附属设施有无变形丢失脱落、杆塔有无异物、拉线受力情况等)
500kVxx线左侧塔头-有鸟窝1处(巡检内容包含:大小号侧导地线有无松股断股、横担有无扭曲歪斜、塔材有无丢失变形、附属设施有无变形丢失脱落、杆塔有无异物、拉线受力情
况等)
500kVxx线右相导线侧挂点(巡检内容包含:大小号侧导地线有无松股断股、挂点金具有无烧伤变形裂纹、金具螺栓有无锈蚀变形松动、开口销有无脱落、均压环有无烧伤、有无异物
等)
500kVxx线左相导线侧挂点(巡检内容包含:大小号侧导地线有无松股断股、挂点金具有无烧伤变形裂纹、金具螺栓有无锈蚀变形松动、开口销有无脱落、均压环有无烧伤、有无异物
等)
500kVxx线右相横担侧挂点(巡检内容包含:绝缘子串挂点螺栓有无松动锈蚀变形、开口销有无脱落、横担有无歪斜变形、屏蔽环有无烧伤、杆塔有无异物等)
500kVxx线左相横担侧挂点(巡检内容包含:绝缘子串挂点螺栓有无松动锈蚀变形、开口销有无脱落、横担有无歪斜变形、屏蔽环有无烧伤、杆塔有无异物等)
500kVxx线右相绝缘子串(巡检内容包含:合成绝缘子伞裙有无破裂、烧伤,金具、均压环屏蔽环有无变形、扭曲、锈蚀等异常情况、绝缘子与绝缘横担有无闪络痕迹和局部火花放电。